دليل معايرة الكاميرا لرؤية الحاسوب في 2025
تعرف على كيفية تعزيز معايرة الكاميرا لذكاء الرؤية الاصطناعي من خلال تصحيح التشوهات، وتحسين تقدير العمق، وزيادة الدقة في تطبيقات رؤية الحاسوب المختلفة.

لا ترى الكاميرات العالم كما يراه البشر. وغالبًا ما تنتهي بالتقاط صور بها تشوهات وتحولات في المنظور، مما قد يؤثر على دقة نماذج الذكاء الاصطناعي للرؤية. يمكن أن تعمل معايرة الكاميرا على إصلاح هذه التشوهات وضمان قدرة نماذج الرؤية الحاسوبية على إدراك الأشياء كما هي بالفعل في العالم الحقيقي. تتضمن هذه العملية تصحيح تشوه العدسة، وضبط الطول البؤري، ومحاذاة المستشعرات لمساعدة الكاميرات على التقاط صور دقيقة.
على وجه التحديد، تعد معايرة الكاميرا الدقيقة مفتاحاً لتقدير العمق وقياس المسافات بشكل صحيح. تحتاج نماذج الرؤية بالذكاء الاصطناعي مثل Ultralytics YOLO11 إلى مدخلات تمت معايرتها جيداً لأداء مهام الرؤية الحاسوبية المختلفة مثل اكتشاف الأشياء وتقدير الوضعية. وبدون صور الإدخال المناسبة، قد ينخفض أداء النموذج ويؤدي إلى أخطاء في تطبيقات العالم الحقيقي.
يمكن أن تساعد طرق معايرة الكاميرا المختلفة، بدءاً من أنماط رقعة الشطرنج التقليدية ووصولاً إلى التقنيات المتقدمة القائمة على الذكاء الاصطناعي، في تحسين الدقة. على سبيل المثال، تساعد المعايرة ثلاثية الأبعاد (3D) النماذج على فهم العمق، بينما تقوم مصفوفة المعايرة بتحويل إحداثيات العالم الحقيقي إلى مساحة الصورة لتحقيق دقة أفضل.
في هذا الدليل، سنغطي أساسيات معايرة الكاميرا للرؤية الحاسوبية، بما في ذلك المعلمات الرئيسية، والطرق المختلفة، والتحسين لتطبيقات الذكاء الاصطناعي في العالم الحقيقي.
Link to this sectionأهمية معايرة الكاميرا في الرؤية الحاسوبية#
تُستخدم معايرة الكاميرا لضبط إعدادات الكاميرا لضمان مطابقة الصور بدقة لقياسات العالم الحقيقي. وهي تضمن ظهور الأشياء في الصورة في الموقع والحجم والنسبة الصحيحة، مما يمنع التشوهات التي قد تضلل نماذج الذكاء الاصطناعي.
بدون المعايرة المناسبة، يمكن أن تسبب الكاميرات تشوهاً في العدسة، مما يجعل الأشياء تبدو ممدودة أو غير محاذية. ويؤثر هذا على دقة اكتشاف الأشياء وتتبعها وتقدير العمق، مما يؤدي إلى أخطاء في التطبيقات المدعومة بالذكاء الاصطناعي. وعلى وجه الخصوص، تعمل نماذج مثل YOLO11 بشكل أكثر فاعلية عندما تتم معايرة بيانات الإدخال بشكل صحيح، مما يقلل الأخطاء في التفسير المكاني ويحسن اتخاذ القرار في العالم الحقيقي.
تعد المعايرة الدقيقة مهمة بشكل خاص للطائرات بدون طيار (الدرونز)، والسيارات ذاتية القيادة، والرؤية الروبوتية. يمكن أن يؤدي عدم المحاذاة في هذه الأنظمة إلى حسابات غير صحيحة للمسافة، مما يؤثر على مهام مثل الملاحة واكتشاف العوائق.
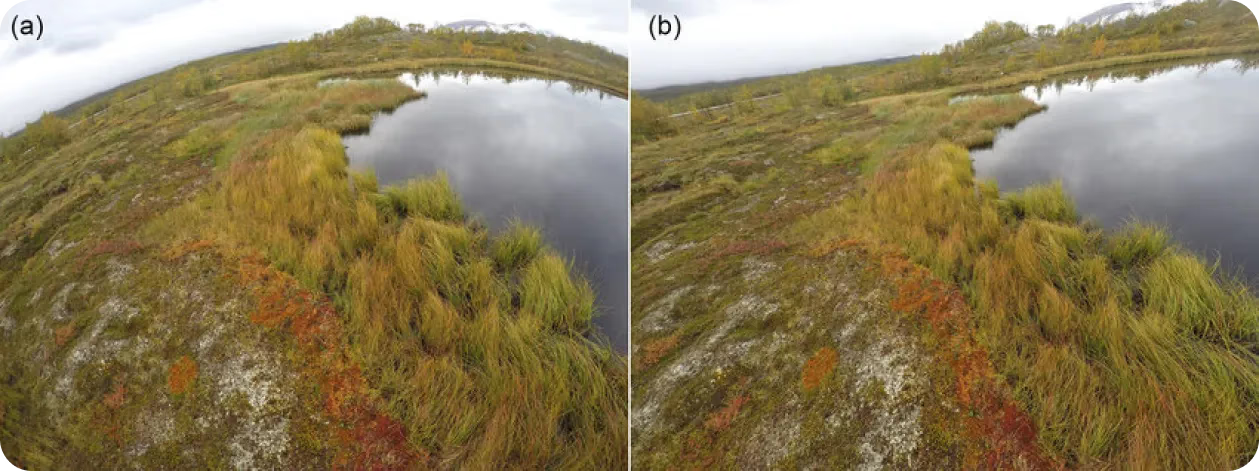
الشكل 1. مثال على تشوه العدسة (على اليسار) مصحح باستخدام معايرة الكاميرا (على اليمين).
Link to this sectionاستكشاف تأثيرات تشوه العدسة#
يمكن أن تتسبب تشوهات العدسة في أن تُسيء الكاميرا تمثيل أشكال الأشياء ومواقعها في الصورة. فيما يلي بعض الأمثلة على أنواع مختلفة من تشوهات العدسة:
- تشوه البرميل (Barrel distortion): هنا، تظهر الخطوط المستقيمة منحنية للخارج، مما يجعل الأشياء في وسط الصورة تبدو منتفخة. هذا شائع في العدسات واسعة الزاوية ويمكن أن يعطل المعايرة ثلاثية الأبعاد في الأنظمة ذاتية القيادة عن طريق تشويه إدراك العمق.
- تشوه الوسادة (Pincushion distortion): في هذه الحالة، تنحني الخطوط المستقيمة للداخل باتجاه مركز الصورة، مما يخلق تأثيراً معاكساً لتشوه البرميل.
- تشوه الشارب (Mustache distortion): يحدث هذا عندما تتحد تشوهات البرميل والوسادة، مما يتسبب في انحناء الخطوط المستقيمة بنمط يشبه الموجة.
- الانحراف اللوني (Chromatic aberration): يحدث هذا عندما تفشل العدسة في تركيز الألوان في نفس النقطة، مما يخلق حواف ملونة حول الأشياء.
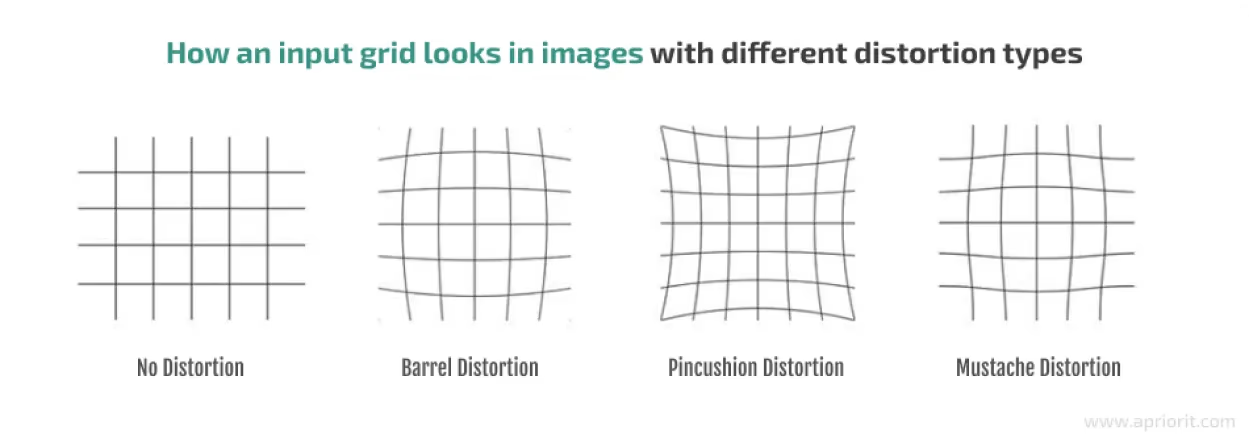
الشكل 2. أنواع مختلفة من تشوهات العدسة.
Link to this sectionأنواع معايرة الكاميرا#
تتكون معايرة الكاميرا من مكونين رئيسيين: المعلمات الجوهرية (intrinsic parameters)، التي تحدد الخصائص الداخلية للكاميرا، والمعلمات الخارجية (extrinsic parameters)، التي تحدد موقعها وتوجهها بالنسبة للعالم. لنلقِ نظرة فاحصة على كلا النوعين من المكونات.
Link to this sectionالمعلمات الجوهرية#
يمكن للمعايرة الجوهرية الدقيقة تحسين تنبؤات النموذج من خلال التأكد من ظهور الأشياء المكتشفة في الموقع والمقياس الصحيحين في تطبيقات العالم الحقيقي. فيما يلي نظرة سريعة على بعض المعلمات الجوهرية:
- الطول البؤري (Focal length): يتحكم في كيفية إسقاط الكاميرا للأشياء ثلاثية الأبعاد على صورة ثنائية الأبعاد. إذا تمت معايرتها بشكل خاطئ، فقد تظهر الأشياء ممدودة أو مضغوطة، مما يغير حجمها ومسافتها المدركة.
- النقطة الرئيسية (Principal point): تمثل المركز البصري لمستشعر الكاميرا. إذا تم إزاحتها، يمكن أن تؤدي إلى إزاحة الصورة بأكملها، مما يؤدي إلى عدم محاذاة في تحديد موضع الأشياء.
- معامل الانحراف (Skew coefficient): يفسر ترتيبات البكسل غير المستطيلة في المستشعر. عند وجود انحراف، قد تبدو الصورة مائلة أو مشوهة بدلاً من محاذاتها بشكل صحيح.
- معاملات التشوه (Distortion coefficients): تعمل هذه المعلمات على تصحيح التشوهات البصرية الناتجة عن العدسة. بدون تصحيح، يمكن أن تظهر الخطوط المستقيمة منحنية، خاصة بالقرب من حواف الصورة.
Link to this sectionالمعلمات الخارجية#
تحدد المعايرة الخارجية كيفية وضع الكاميرا وتوجيهها بالنسبة للعالم الحقيقي، وهو أمر مهم بشكل خاص في أنظمة الكاميرات المتعددة المستخدمة في المعايرة ثلاثية الأبعاد، وتتبع الأشياء، وإدراك العمق. فهي تساعد الطائرات بدون طيار، والمركبات ذاتية القيادة، وأنظمة المراقبة على تفسير العلاقات المكانية بدقة.
فيما يلي معلمتان رئيسيتان خارجيتان:
- مصفوفة الترجمة (Translation matrix): تحدد الموقع المادي للكاميرا في الفضاء ثلاثي الأبعاد، وتحدد موقعها على طول محاور X و Y و Z. إذا تمت معايرتها بشكل خاطئ، فقد تظهر الأشياء أقرب أو أبعد مما هي عليه في الواقع، مما يؤدي إلى قياسات مسافة غير صحيحة. في المركبات ذاتية القيادة، يمكن أن يؤدي هذا إلى ضعف اكتشاف العوائق، بينما في الروبوتات، قد يتسبب في أخطاء في تحديد الموقع أثناء معالجة الأشياء.
- مصفوفة الدوران (Rotation matrix): تحدد توجه الكاميرا من خلال تحديد مدى ميلها، أو دورانها، أو زواياها بالنسبة لنقطة مرجعية. إذا لم تتم معايرتها بشكل صحيح، فقد لا تصطف الصور الملتقطة من كاميرات متعددة بشكل صحيح، مما يسبب مشاكل في إعادة البناء ثلاثي الأبعاد، والتتبع عبر كاميرات متعددة، ورسم الخرائط المكانية. على سبيل المثال، في سيارة ذاتية القيادة، يمكن لمصفوفة دوران غير صحيحة أن تؤدي إلى عدم محاذاة مدخلات المستشعر، مما يؤدي إلى اكتشاف غير دقيق للمسارات.
Link to this sectionالتعرف على مصفوفة معايرة الكاميرا#
كل صورة تلتقطها الكاميرا هي تمثيل ثنائي الأبعاد لعالم ثلاثي الأبعاد. تحتاج نماذج الذكاء الاصطناعي إلى طريقة للترجمة بين هذه الأبعاد لإجراء تنبؤات دقيقة. هنا يأتي دور مصفوفة معايرة الكاميرا. فهي تقوم برسم نقاط العالم الحقيقي على مستوى صورة الكاميرا بحيث تظهر الأشياء في موقعها الصحيح.
ببساطة، مصفوفة معايرة الكاميرا هي نموذج رياضي يمثل المعلمات الجوهرية للكاميرا. يتم تخزينها عادةً في أنظمة الرؤية وتُستخدم في خوارزميات معالجة الصور لتصحيح التشوهات وتعيين نقاط ثلاثية الأبعاد إلى إحداثيات ثنائية الأبعاد.
كما سنرى لاحقاً، يتم حساب المصفوفة باستخدام طرق معايرة مثل اكتشاف نمط رقعة الشطرنج، والمعايرة القائمة على كائن ثلاثي الأبعاد، والمعايرة الذاتية القائمة على الذكاء الاصطناعي، والتي تقدر المعلمات الرئيسية من خلال تحليل صور نقاط مرجعية معروفة.
Link to this sectionطرق مختلفة لمعايرة الكاميرا#
توجد طرق مختلفة لمعايرة الكاميرا، كل منها مناسب لحالات استخدام محددة. تعتمد الطرق التقليدية على أنماط فيزيائية، بينما تستخدم التقنيات المعتمدة على الذكاء الاصطناعي التعلم العميق لأتمتة العملية.
دعونا نستعرض هذه الطرق ونستكشف كيف تعمل على تحسين الدقة في التطبيقات المختلفة.
Link to this sectionطرق معايرة الكاميرا التقليدية#
تستخدم إحدى أكثر طرق معايرة الكاميرا شيوعاً نمط رقعة الشطرنج أو الشبكة الموضوعة أمام الكاميرا. يكتشف النظام النقاط الرئيسية في النمط لحساب معلمات المعايرة.
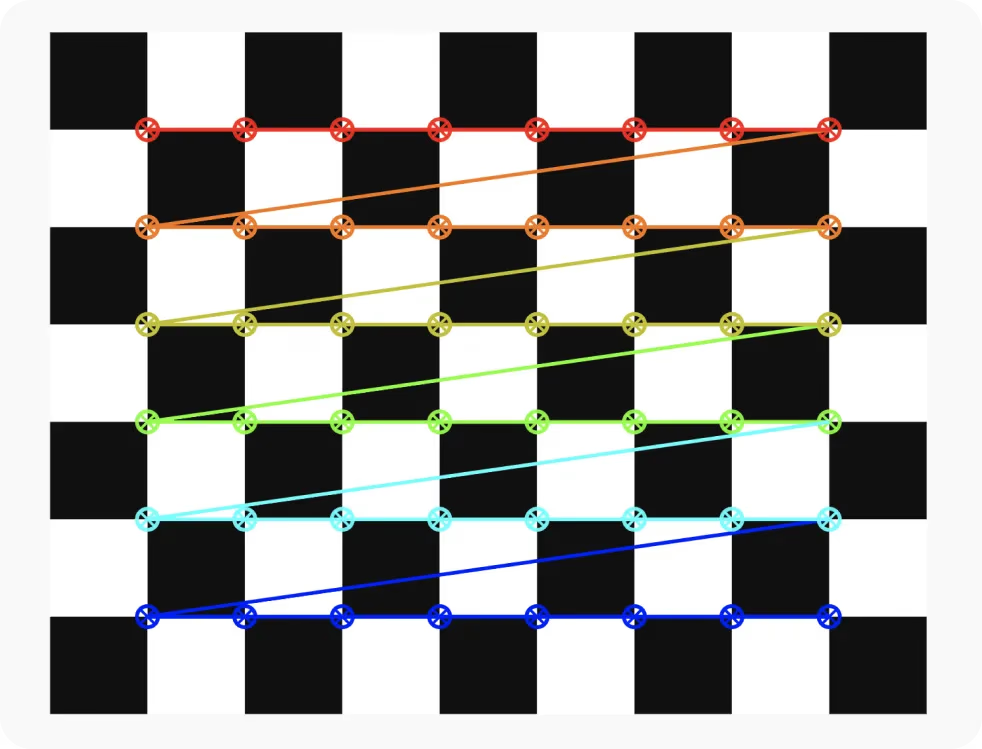
الشكل 3. رقعة شطرنج لمعايرة الكاميرا.
على الرغم من فائدتها في البيئات الخاضعة للرقابة، فإنها تتطلب تعديلات يدوية وتحليلاً لصور متعددة من زوايا مختلفة. يمكن أن تؤدي التغيرات في ظروف الإضاءة أو حركات الكاميرا غير المتوقعة إلى تقليل الدقة، مما يجعل إعادة المعايرة ضرورية.
في البيئات الديناميكية، مثل الطائرات بدون طيار والسيارات ذاتية القيادة، تكافح المعايرة التقليدية لمواكبة التغيرات. تتطلب الكاميرا المتحركة إعادة معايرة متكررة للحفاظ على الدقة، وهو أمر غير عملي مع الأنماط الثابتة. أدى هذا القيد إلى دفع عجلة التقدم في معايرة الكاميرا المعتمدة على الذكاء الاصطناعي، مما يوفر مرونة وأتمتة أكبر.
Link to this sectionطرق معايرة الكاميرا المعتمدة على الذكاء الاصطناعي#
تعمل التقنيات المعتمدة على الذكاء الاصطناعي على أتمتة معايرة الكاميرا باستخدام نماذج التعلم العميق للمعايرة الذاتية، مما يقلل الحاجة إلى التعديلات اليدوية. تقدر هذه الطرق المعلمات الجوهرية والخارجية مباشرة من صور العالم الحقيقي، مما يلغي الحاجة إلى أنماط محددة مسبقاً.
وبالمثل، تُحدث مجموعات البيانات الاصطناعية ثورة في معايرة الكاميرا من خلال تزويد نماذج الذكاء الاصطناعي ببيانات تدريب متنوعة ومصنفة لتحسين المعلمات وتصحيح التشوهات. تحاكي مجموعات البيانات هذه ظروف العالم الحقيقي، مما يساعد نماذج الذكاء الاصطناعي على تعلم ضبط المعلمات الجوهرية والخارجية ديناميكياً دون تدخل بشري.
على سبيل المثال، تستخدم أطر العمل ذاتية المعايرة نماذج احتمالية وتعلم عميق لتحليل الصور أحادية العين، وتقدير الهياكل ثلاثية الأبعاد، وتحسين المعايرة بشكل مستمر. تعمل البيانات الاصطناعية على تعزيز هذه العملية من خلال تدريب النماذج على التعامل مع وجهات نظر متنوعة، وعدم محاذاة المستشعرات، وظروف الإضاءة المختلفة، مما يحسن تقدير العمق، وتتبع العوائق، والدقة المكانية في تطبيقات مثل القيادة الذاتية والروبوتات.

الشكل 4. نظام رؤية بالذكاء الاصطناعي ذاتي المعايرة يمكنه فهم حركة المرور.
Link to this sectionالتطبيقات الرئيسية لمعايرة الكاميرا#
الآن بعد أن فهمنا ما هي معايرة الكاميرا، دعونا نستكشف تأثيرها عبر مختلف الصناعات.
Link to this sectionالمركبات ذاتية القيادة وملاحة الطائرات بدون طيار#
بالنسبة للسيارات ذاتية القيادة والطائرات بدون طيار المستقلة، تعد معايرة الكاميرا الدقيقة مهمة للملاحة الآمنة والموثوقة. تعتمد هذه الأنظمة على تقدير العمق وحساب المسافة لاكتشاف العوائق، وتتبع علامات الطرق، وتقييم الأشياء المحيطة. يمكن أن تتسبب المعايرة الضعيفة في تفسيرات خاطئة للمسافة، مما يؤدي إلى قرارات غير صحيحة في سيناريوهات الوقت الفعلي.
تمكن مصفوفة المعايرة بشكل صحيح المركبات ذاتية القيادة من دمج المدخلات من LiDAR والرادار والكاميرات، مما يحسن دمج أجهزة الاستشعار المتعددة. وهذا يساعد المركبة على قياس المسافات بدقة إلى المشاة، وحدود المسارات، والسيارات القريبة، مما يقلل من مخاطر الحوادث. في الوقت نفسه، في الطائرات بدون طيار، تساعد المعايرة ثلاثية الأبعاد في الحفاظ على استقرار الارتفاع وتتبع الأشياء بدقة للملاحة الدقيقة في البيئات الديناميكية.

الشكل 5. كاميرا معايرة في سيارة ذاتية القيادة.
Link to this sectionالواقع المعزز (AR) والواقع الافتراضي (VR)#
تعتمد تطبيقات AR و VR على معايرة دقيقة للكاميرا لمحاذاة المحتوى الرقمي مع أشياء العالم الحقيقي. إذا لم تتم معايرتها بشكل صحيح، يمكن أن تنجرف تراكبات AR، أو تظهر غير محاذية، أو يتم تحجيمها بشكل غير صحيح، مما يعطل تجربة المستخدم.
يعد تصحيح تشوه العدسة مفتاحاً لجعل الأشياء الافتراضية تمتزج بسلاسة في البيئات الحقيقية. وبدونه، يمكن للتشوهات أن تكسر الانغماس وتقلل الدقة في الألعاب، وعمليات المحاكاة التدريبية، والتصوير الطبي. علاوة على ذلك، في VR، تعمل المعايرة على تحسين التتبع الدقيق لحركات الرأس واليد، مما يحسن الاستجابة ويخلق تجربة أكثر سلاسة وغامرة.

الشكل 6. إعداد معايرة كاميرا ثلاثية الأبعاد يُستخدم لتحسين القياسات المكانية.
Link to this sectionالرؤية الروبوتية والأتمتة الصناعية#
لكي تتمكن الروبوتات من رؤية العالم والتفاعل معه بدقة، تعد معايرة الكاميرا المناسبة أمراً حاسماً. في الأتمتة الصناعية، تعتمد الروبوتات على تقدير العمق لالتقاط الأشياء ووضعها ومعالجتها بدقة. بدون المعايرة المناسبة، يمكن أن تتسبب عدم المحاذاة في أخطاء في التعبئة والتغليف، والتجميع، وعمليات فحص مراقبة الجودة.
أحد التحديات الرئيسية في الروبوتات هو قياس الأشياء المسطحة بدقة. تساعد المعايرة الأذرع الروبوتية على اكتشاف الأبعاد الدقيقة، مما يمنع الحسابات الخاطئة التي قد تبطئ الإنتاج أو تعطل سير العمل. تأخذ المعايرة ثلاثية الأبعاد هذا الأمر خطوة أخرى إلى الأمام من خلال السماح للروبوتات بالتكيف مع تغير الأشياء أو المواقع.
Link to this sectionأبرز النقاط#
تعد معايرة الكاميرا مكوناً مهماً للعديد من حلول الرؤية الحاسوبية. فهي تضمن قيام نماذج الذكاء الاصطناعي بتفسير الصور بدقة لمهام مثل اكتشاف الأشياء، والتتبع، وتقدير العمق. تساعد المعلمات الجوهرية والخارجية في محاذاة الصور مع قياسات العالم الحقيقي لمنع التشوهات التي قد تؤثر على التطبيقات المدعومة بالذكاء الاصطناعي.
يعد تصحيح تشوه العدسة أمراً بالغ الأهمية لتطبيقات الواقع المعزز، والأتمتة الصناعية، وأنظمة الكاميرات المتعددة. مع تقدم الذكاء الاصطناعي، تعمل طرق معايرة الكاميرا المؤتمتة على تحسين الكفاءة، والدقة، والموثوقية طويلة المدى في تطبيقات العالم الحقيقي.






