تعزيز التنبؤ بمسار الكرة باستخدام الذكاء الاصطناعي البصري
تعرف على كيف يحسن الذكاء الاصطناعي البصري التنبؤ بمسار الكرة ويتيح رؤى في الوقت الفعلي للرياضة والروبوتات وتطبيقات ذكية أخرى.

عندما يقوم لاعب كرة السلة المفضل لديك بتسديد الكرة، غالباً ما يمكنك معرفة ما إذا كانت ستدخل السلة أم ستخطئها. كإنسان، أنت قادر على التنبؤ بذلك لأنك ربما شاهدت العديد من مباريات كرة السلة وتعرف ما يمكن توقعه. الآن تخيل آلة تشاهد مباراة كرة سلة عبر كاميرا، وتحاول معرفة ما إذا كانت التسديدة ستدخل السلة أم لا.
الأمر أكثر تعقيداً بكثير. إن تكرار الذكاء البصري الذي نكتسبه من خلال التجربة ليس بسيطاً كما يبدو. في الواقع، يُعد التنبؤ بمسار الكرة مجالاً رائعاً للبحث الذي يستكشف كيف يمكن للآلات تحليل الحركة والدوران والزاوية للتنبؤ بالمكان الذي ستستقر فيه الكرة.

الشكل 1. مسار تسديدة كرة سلة. (المصدر)
في وقت مبكر من عام 1537، اكتشف عالم الرياضيات الإيطالي نيكولو فونتانا تارتاغليا أن قذيفة المدفع تقطع أبعد مسافة عندما يتم إطلاقها بزاوية 45 درجة. وضعت نتائجه الأساس لكيفية فهمنا للحركة والتنبؤ اليوم.
الآن، مع التقدم في علوم الكمبيوتر والذكاء الاصطناعي (AI)، يمكن للآلات التنبؤ بمسار الكرة بدقة وفي الوقت الفعلي. من خلال تحليل تفاصيل مثل موقع الكرة وسرعتها ودورانها وزاويتها، يمكن لأنظمة الذكاء الاصطناعي التنبؤ بالمكان الذي ستستقر فيه. يساعد هذا في تطبيقات تتراوح من تدريب اللاعبين وتحليل الأداء إلى الرعاية الصحية والروبوتات.
على وجه الخصوص، يُعد الرؤية الحاسوبية مجالاً من مجالات الذكاء الاصطناعي الذي يساعد الآلات على تفسير وفهم المعلومات المرئية من العالم من حولها. وهو ما يمكّن الأنظمة من التعرف على الأشياء، وتتبع حركتها، وفهم ما تراه من خلال الكاميرات أو الفيديو.
عند تطبيقها على التنبؤ بمسار الكرة، يمكن لنماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 وUltralytics YOLO26 مساعدة النظام على اكتشاف الكرة وتتبعها إطاراً بإطار. توفر هذه البيانات المرئية معلومات دقيقة حول موقع الكرة في كل إطار، والتي يمكن بعد ذلك استخدامها لتقدير سرعتها واتجاهها بمرور الوقت. يمكن لنماذج الذكاء الاصطناعي والخوارزميات المختلفة بعد ذلك استخدام هذه البيانات للتنبؤ بمكان انتقال الكرة بعد ذلك.
في هذا المقال، سنستكشف التنبؤ بمسار الكرة، والأساليب المختلفة المتضمنة، ودور الرؤية الحاسوبية. لنبدأ!
Link to this sectionأهمية التنبؤ بمسار الكرة#
بعيداً عن كونه مجالاً بحثياً مثيراً للاهتمام، يدفع التنبؤ بمسار الكرة تطوير تقنيات عملية ومؤثرة عبر العديد من المجالات. على سبيل المثال، في المركبات ذاتية القيادة، يمكّن التنبؤ بالمسار السيارات من توقع المسارات المستقبلية للمركبات الأخرى وراكبي الدراجات والمشاة. من خلال التنبؤ بالمكان الذي من المحتمل أن تتواجد فيه هذه الأجسام المتحركة في الثواني القليلة القادمة، يمكن للأنظمة ذاتية القيادة اتخاذ قرارات أكثر أماناً وكفاءة من خلال تعديل السرعة، أو تغيير المسارات، أو تجنب الاصطدامات المحتملة مسبقاً.
وبالمثل، في مجال الروبوتات، يجعل التنبؤ بمسار الكرة من الممكن للآلات اكتشاف الأجسام المتحركة وتتبعها والاستجابة لها بدقة عالية. وهذا مفيد بشكل خاص في الأنظمة الآلية التي تحتاج إلى التعامل مع العناصر سريعة الحركة في الوقت الفعلي، مثل الروبوتات الصناعية أو طائرات التوصيل بدون طيار.
Link to this sectionنظرة عامة على كيفية عمل التنبؤ بمسار الكرة#
إذاً، كيف يعمل التنبؤ بمسار الكرة بالفعل؟ يعتمد ذلك على الطريقة المستخدمة. بشكل عام، يهدف كل نهج إلى القيام بالشيء نفسه: فهم كيفية تحرك الكرة حالياً والتنبؤ بمكان انتقالها بعد ذلك.
إليك لمحة عن بعض الأساليب المختلفة المستخدمة:
- النمذجة القائمة على الفيزياء: يستخدم هذا النهج قوانين الحركة والديناميكا الهوائية لحساب كيفية تأثير عوامل مثل السرعة، وزاوية الإطلاق، والجاذبية، ومقاومة الهواء على مسار رحلة الكرة.
- نماذج التعلم الآلي: تحلل هذه النماذج مجموعات كبيرة من بيانات الحركة لتعلم أنماط كيفية تحرك الكرة، مما يسمح لها بتقديم تنبؤات دقيقة دون الاعتماد على معادلات فيزيائية صريحة.
- التنبؤ القائم على الرؤية الحاسوبية: تستخدم هذه الطريقة لقطات الفيديو لاكتشاف الكرة وتتبعها إطاراً بإطار، مما ينتج بيانات مرئية تساعد الخوارزميات على تقدير سرعتها واتجاهها وموقعها المستقبلي.
- الأنظمة القائمة على المستشعرات: تستخدم هذه الأنظمة بيانات من مستشعرات الحركة، أو الرادار، أو كاميرات الأشعة تحت الحمراء لقياس موقع الكرة وسرعتها ودورانها بدقة في الوقت الفعلي.
- الأساليب الهجينة: تجمع بين تقنيتين أو أكثر. على سبيل المثال، دمج الرؤية الحاسوبية مع النمذجة القائمة على الفيزياء لتحقيق تنبؤات مسار أكثر دقة وموثوقية.
بعد ذلك، سنلقي نظرة فاحصة على كيفية عمل التنبؤ بمسار الكرة القائم على الرؤية الحاسوبية والخوارزميات التي تجعل ذلك ممكناً.
Link to this sectionأساسيات التنبؤ بمسار الكرة#
قبل أن ننظر إلى كيفية لعب الرؤية الحاسوبية دوراً في التنبؤ بمسار الكرة وكيفية عمل هذه الأنظمة، دعنا نوضح الأساسيات.
يتضمن التنبؤ بمسار الكرة بشكل عام جزأين رئيسيين: التتبع ونمذجة الحركة. تُستخدم خوارزميات التتبع لمتابعة الكرة إطاراً بإطار في مقطع فيديو، مع تقدير مكان ظهورها بعد ذلك. هذه الأساليب مفيدة للتنبؤات قصيرة المدى في الوقت الفعلي.
من ناحية أخرى، تذهب طرق نمذجة الحركة (التي تتضمن عادةً الفيزياء أو التعلم الآلي) إلى أبعد من ذلك. فهي تهدف إلى التنبؤ بالمسار الكامل للكرة، بما في ذلك المكان الذي ستستقر فيه.
ببساطة، يحدد التتبع موقع الكرة الحالي وحركتها، بينما تستخدم النمذجة تلك المعلومات لتقدير مسارها المستقبلي ونقطة هبوطها. معاً، فهي تمكّن من التنبؤ الدقيق بمسار الكرة في الوقت الفعلي.
Link to this sectionنظرة فاحصة على التتبع ونمذجة الحركة#
قد تتساءل عن سبب أهمية التمييز بين التتبع والتنبؤ. بينما نستكشف هذا الموضوع بشكل أكبر، ستلاحظ أن العديد من خوارزميات التتبع لا تقوم بالتتبع فقط. فهي تجري أيضاً تنبؤات قصيرة المدى حول المكان الذي ستظهر فيه الكرة بعد ذلك.
على سبيل المثال، تستخدم نماذج الرؤية الحاسوبية مثل YOLO11، التي تدعم تتبع الأشياء من خلال خوارزميات التتبع مثل ByteTrack أو SORT، بيانات الاكتشاف من كل إطار فيديو لتقدير موقع الكرة التالي في الوقت الفعلي. يساعد هذا النظام في الحفاظ على تتبع دقيق حتى عندما تتحرك الكرة بسرعة أو تصبح مخفية جزئياً.
ومع ذلك، بينما تعد هذه النماذج رائعة في متابعة الحركة، فإنها عادة ما تتنبأ فقط بالموقع التالي للكرة بدلاً من مسار رحلتها بالكامل أو نقطة هبوطها. وهنا تصبح طرق نمذجة الحركة ضرورية.
بمعنى آخر، لا يمكن لنموذج الرؤية الحاسوبية بمفرده التنبؤ بمسار الكرة بالكامل. يمكنه اكتشاف موقع الكرة وتتبعها إطاراً بإطار، لكنه لا يأخذ في الحسبان القوى الفيزيائية التي تؤثر على حركتها، مثل الجاذبية، والدوران، والسحب، أو مقاومة الهواء.
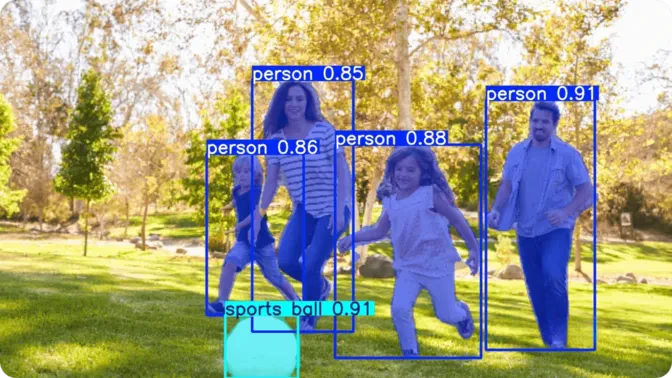
الشكل 2. مثال على اكتشاف الكرة وتجزئتها باستخدام YOLO11. (المصدر)
لإجراء تنبؤات دقيقة طويلة المدى، غالباً ما يتم دمج البيانات المرئية من الرؤية الحاسوبية مع طرق نمذجة الحركة. تستخدم هذه الطرق إما معادلات قائمة على الفيزياء أو خوارزميات التعلم الآلي لتحليل حركة الكرة بمرور الوقت والتنبؤ بمسارها الكامل، بما في ذلك المكان الذي ستستقر فيه.
Link to this sectionالخوارزميات الشائعة المستخدمة لتتبع الكرة في الرؤية الحاسوبية#
تعد خوارزميات التتبع جزءاً حاسماً من أنظمة التنبؤ بمسار الكرة. فهي تقدر موقع الكرة وحركتها بمرور الوقت أثناء التعامل مع تحديات مثل الانسداد الموجز (عندما تكون الكرة مخفية مؤقتاً عن الأنظار بواسطة جسم آخر).
بعد ذلك، سنستعرض بعض خوارزميات التتبع الشائعة.
Link to this sectionمرشح كالمان (Kalman Filter)#
مرشح كالمان هو خوارزمية رياضية تُستخدم لتقدير موقع وسرعة الجسم بمرور الوقت، حتى عندما تكون القياسات مشوشة أو غير مكتملة. على سبيل المثال، استخدمت NASA مرشحات كالمان لتتبع مسارات مركبات الطيران وإعادة بنائها.
من خلال الجمع بين بيانات المستشعرات ونماذج حركة المركبات، يمكن للنظام تنظيف البيانات المشوشة، وإعادة بناء مسار الطيران الفعلي بدقة، وإجراء تنبؤات قصيرة المدى حول المكان الذي ستذهب إليه المركبة بعد ذلك. وهذا يجعل المرشحات مفيدة جداً للتتبع والتحكم في الوقت الفعلي في العديد من المجالات.
في حين أن مرشح كالمان في حد ذاته ليس خوارزمية رؤية حاسوبية، إلا أنه يُستخدم بشكل شائع في الأنظمة القائمة على الرؤية لتتبع الأجسام المتحركة، مثل الكرة، عبر إطارات الفيديو. يعمل عن طريق التنبؤ بمكان ظهور الجسم بعد ذلك، ومقارنة هذا التنبؤ ببيانات الاكتشاف الفعلية، ثم تحديث تقديره ليظل دقيقاً. تجعل دورة التنبؤ والتصحيح المستمرة هذه النظام فعالاً للتتبع في الوقت الفعلي، حتى عندما يختفي الجسم لفترة وجيزة عن الأنظار أو تتغير سرعته فجأة.
Link to this sectionByteTrack#
ByteTrack هي خوارزمية تتبع كائنات في الوقت الفعلي تُستخدم لمتابعة الأجسام المتحركة مثل الكرات عبر إطارات الفيديو. وهي تعمل عن طريق اكتشاف الأجسام في كل إطار وربط عمليات الاكتشاف لنفس الجسم بمرور الوقت، مما يؤدي إلى إنشاء سلسلة مستمرة تسمى "tracklet".
الـ "tracklet" هي سلسلة قصيرة من الإطارات تظهر أين كان الجسم وكيف يتحرك. تساعد عملية الربط هذه النظام في الحفاظ على هوية ثابتة لكل جسم طوال الفيديو.
على عكس طرق التتبع القديمة التي تتجاهل الاكتشافات منخفضة الثقة، تحتفظ ByteTrack بها وتعيد فحصها. وهذا يعني أنه يمكنها الحفاظ على تتبع سلس ومستقر حتى عندما تتحرك الأجسام بسرعة، أو تصبح ضبابية، أو يتم إخفاؤها لفترة وجيزة. على الرغم من أن ByteTrack ليست كاشفاً للأجسام بمفردها، إلا أنها غالباً ما تُستخدم جنباً إلى جنب مع نماذج الرؤية الحاسوبية مثل Ultralytics YOLOv8 أو YOLO11 لتتبع الأجسام بدقة وموثوقية في الوقت الفعلي.
Link to this sectionBoT-SORT#
BoT-SORT هي خوارزمية متقدمة لتتبع كائنات متعددة تعمل على تحسين كيفية متابعة الأنظمة للأجسام المتحركة عبر إطارات الفيديو. وهي تعتمد على ByteTrack وتضيف ميزات رئيسية مثل تعويض حركة الكاميرا وإعادة تحديد هوية الجسم.
يساعد تعويض حركة الكاميرا في تصحيح حركة الكاميرا مثل التحريك أو الاهتزاز، بينما تتيح إعادة تحديد الهوية للنظام التعرف على نفس الجسم ومواصلة تتبعه حتى بعد خروجه وظهوره مرة أخرى في العرض. مثل ByteTrack، يتم استخدامها أيضاً بالاشتراك مع نماذج مثل YOLOv8 أو YOLO11.
Link to this sectionطرق التنبؤ بالمسار الشائعة#
الآن بعد أن رأينا كيفية عمل التتبع وكيف يرتبط بالتنبؤ بمسار الكرة، دعنا نلقي نظرة فاحصة على الأنواع الرئيسية لخوارزميات التنبؤ بالمسار والأساليب المستخدمة لتقدير حركة الكرة.
Link to this sectionالنمذجة الحركية القائمة على الفيزياء#
تتنبأ النمذجة الحركية القائمة على الفيزياء بمسار الكرة باستخدام قوانين الحركة الأساسية. فهي تأخذ في الاعتبار عوامل مثل السرعة الأولية للكرة، وزاوية الإطلاق، والجاذبية، ومقاومة الهواء، والدوران لحساب مسار رحلتها. من خلال الجمع بين هذه العوامل، يقدر النموذج مكان وجود الكرة، ومدى سرعة تحركها، وفي أي اتجاه في أي لحظة.
على سبيل المثال، في رياضات مثل البيسبول أو الجولف، يساعد ذلك في التنبؤ بمدى واتجاه الكرة بناءً على سرعة التأرجح وزاوية الإطلاق. على الرغم من دقتها العالية في البيئات الخاضعة للرقابة، إلا أنها قد تواجه صعوبة في ظروف العالم الحقيقي التي لا يمكن التنبؤ بها مثل الرياح، أو الارتدادات، أو تفاعلات اللاعبين، مما يسبب أخطاء في التنبؤ.
عند دمجها مع الرؤية الحاسوبية، تتيح الأساليب القائمة على نموذج الفيزياء تطبيقات عملية في تحليلات الرياضة والتحكيم. نظام Hawk-Eye، على سبيل المثال، هو نظام رؤية متعدد الكاميرات يعيد بناء مسار الكرة ثلاثي الأبعاد في الوقت الفعلي.
يستخدم العديد من الكاميرات عالية السرعة والمتزامنة لالتقاط موقع الكرة من زوايا متعددة ويطبق التثليث، والمعادلات الحركية، وطرق الاستيفاء لتقدير مسارها. يدعم هذا التكامل التتبع الدقيق واتخاذ القرار في الرياضات، بما في ذلك التنس، والكريكيت، وكرة القدم، حيث تكون دقة المسار ضرورية لتحديد الخطوط وتحليل الأداء.
Link to this sectionنماذج الانحدار للتعلم الآلي#
يمكن لنماذج الانحدار للتعلم الآلي التنبؤ بالموقع المستقبلي للكرة أو مسارها دون الاعتماد على معادلات فيزيائية صريحة. بدلاً من ذلك، فهي تتعلم الأنماط من بيانات مثل الموقع، والسرعة، والدوران، والزاوية التي يتم جمعها من خلال أنظمة التتبع القائمة على الفيديو أو المستشعرات.
عند دمجها مع خوارزميات تتبع الرؤية الحاسوبية، يلتقط نظام الرؤية موقع الكرة عبر إطارات الفيديو. تصبح هذه البيانات الموضعية مدخلاً لنموذج الانحدار، الذي يتعلم كيف تتغير حركة الكرة بمرور الوقت. بمجرد التدريب، يمكن للنموذج التنبؤ بالموقع التالي للكرة أو مسارها العام بناءً على ما لاحظه بالفعل.
على سبيل المثال، فيما يتعلق بـ روبوتات تنس الطاولة أو أنظمة روبوتات بينج بونج، فقد ثبت أن نماذج الانحدار المدربة على آلاف المسارات المتتبعة تتنبأ بأنماط طيران الكرة وارتدادها في الوقت الفعلي. يسمح هذا للروبوت بوضع نفسه أو الاستجابة بسرعة لالتقاط أو رد كرة البينج بونج أو كرة تنس الطاولة. ولأن هذه النماذج تتعلم مباشرة من أمثلة العالم الحقيقي، فإنها غالباً ما تتعامل مع التأثيرات التي لا يمكن التنبؤ بها، مثل الدوران، أو سحب الهواء، أو ملامسة السطح، بشكل أفضل من الأساليب القائمة على الفيزياء بحتة.
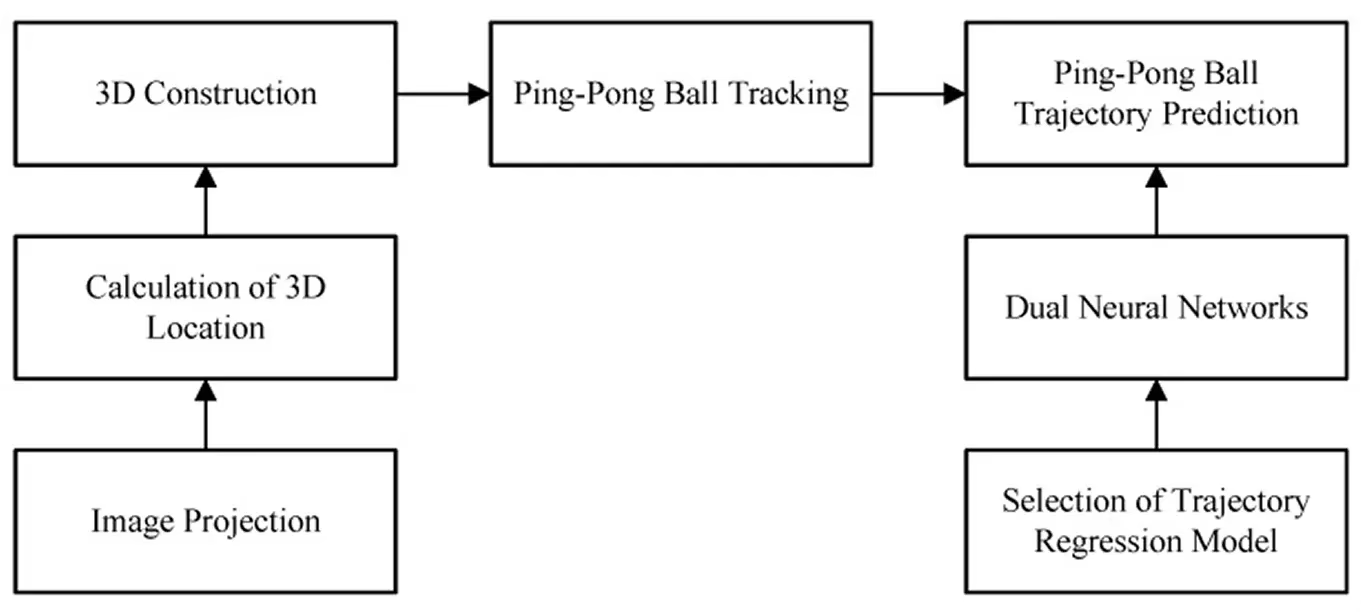
الشكل 3. كيف يتنبأ روبوت بينج بونج بمسار الكرة. (المصدر)
Link to this sectionالشبكات العصبية المتكررة (RNNs) وشبكات الذاكرة الطويلة قصيرة المدى (LSTMs)#
الشبكات العصبية المتكررة (RNNs) وشبكات الذاكرة الطويلة قصيرة المدى (LSTMs) هي نماذج ذكاء اصطناعي مصممة لمعالجة البيانات التي تتغير بمرور الوقت، مثل الحركة أو غيرها من المعلومات المتعلقة بالسلاسل الزمنية. يمكنها تذكر ما حدث سابقاً، مما يساعدها على التعرف على أنماط الحركة والتنبؤ بما قد يحدث بعد ذلك.
في التنبؤ بمسار الكرة، تتعلم هذه النماذج كيف تؤثر مواقع الكرة وسرعاتها ودورانها السابقة على المكان الذي ستذهب إليه بعد ذلك. عند دمجها مع الرؤية الحاسوبية وتتبع الأشياء، يمكن لنظام الرؤية التقاط مواقع الكرة عبر الإطارات. يمكن لـ RNN بعد ذلك استخدام هذه السلسلة من المواقع للتنبؤ بحركة الكرة التالية أو مسارها الكامل.
أيضاً، تعتبر LSTMs مؤثرة بشكل خاص لأنها تستطيع تذكر المعلومات لفترات أطول. هذا يمكنها من متابعة حركة الكرة الكاملة حتى عندما تتحرك بسرعة أو تغير اتجاهها.
اتخذت الأبحاث الأخيرة هذه الفكرة خطوة إلى الأمام. طور العلماء نماذج Hierarchical Bi-LSTM التي يمكنها التنبؤ بمسارات الكرة في الرياضات الجماعية من خلال تحليل كيفية تحرك اللاعبين وتفاعلهم مع بعضهم البعض. يمكن لهذه النماذج حتى تقدير موقع الكرة عندما تكون مخفية مؤقتاً أو خارج نطاق الرؤية، باستخدام أنماط سلوك اللاعبين لاستنتاج المكان الذي من المرجح أن تتواجد فيه الكرة.
Link to this sectionتطبيقات العالم الحقيقي للتنبؤ بمسار الكرة#
مع فهم أفضل للرؤية الحاسوبية والتنبؤ بمسار الكرة، دعنا نستكشف تطبيقاتها العملية في مجالات مثل الرياضة، وإعادة التأهيل، والروبوتات.
Link to this sectionالتنبؤ بمسار الكرة في الرياضة#
يعد فهم كيفية تحرك الكرة وأين ستستقر أمراً بالغ الأهمية في العديد من الرياضات. باستخدام المعلومات من الكاميرات والمستشعرات، يمكن لنماذج الذكاء الاصطناعي التنبؤ بمسار الكرة وسرعتها الأولية، مما يساعد الفرق الرياضية على توقع اللعب، وتحسين التقنيات، واتخاذ قرارات أكثر ذكاءً.
كما أنها تدعم تدريب اللاعبين من خلال تحليل عوامل مثل الدوران أو زاوية الإطلاق، مما يساعد الرياضيين على تحسين الأداء وتجنب الإصابة. تستخدم العديد من أنظمة التدريب الرياضي المتطورة الآن التنبؤ بمسار الكرة لتعزيز تطوير المهارات والاستراتيجية.
على سبيل المثال، طور الباحثون نظام رؤية حاسوبية لروبوتات التنس يمكنه اكتشاف والتنبؤ بـ مسار كرة التنس. باستخدام كاميرات ستيريو وشبكات عصبية تلافيفية، يساعد النظام الروبوت على رؤية الكرة في ثلاثة أبعاد (محور x، ومحور y، ومحور z) والاستجابة بدقة أكبر أثناء اللعب. يمكن أن تكون هذه أداة مغيرة لقواعد اللعبة لتدريب اللاعبين للمسابقات.
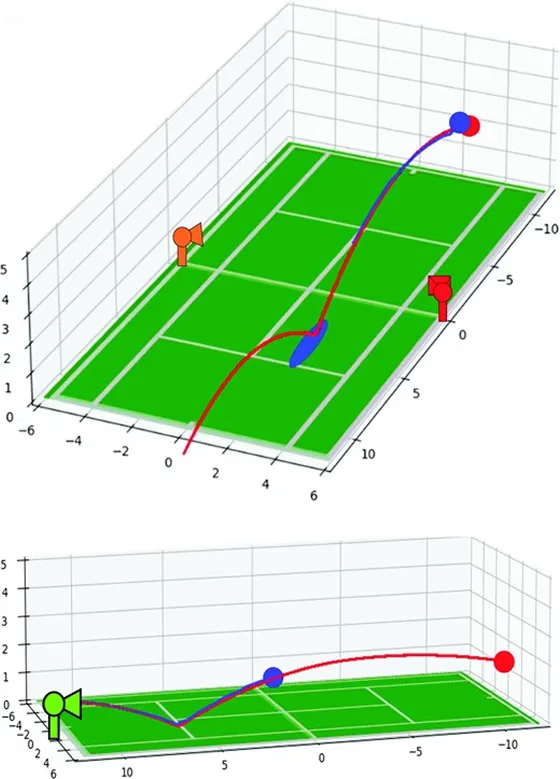
الشكل 4. يظهر اللون الأحمر المسار المحاكى؛ ويظهر اللون الأزرق تنبؤ الروبوت بمسار الكرة. (المصدر)
Link to this sectionإيجابيات وسلبيات التنبؤ بمسار الكرة القائم على الرؤية الحاسوبية#
إليك بعض المزايا الرئيسية لاستخدام أنظمة التنبؤ بمسار الكرة القائمة على الرؤية الحاسوبية:
- التنبؤ في الوقت الفعلي: يمكن لهذه الأنظمة التنبؤ بدقة بالمسار المستقبلي للكرة فوراً، حتى عند السرعات العالية.
- غير تداخلية: يمكنها العمل فقط على مدخلات الفيديو، دون الحاجة إلى مستشعرات أو علامات فيزيائية.
- قابلة للتطوير والتكيف: يمكن تطبيق أنظمة التنبؤ بمسار الكرة القائمة على الرؤية عبر رياضات وبيئات مختلفة باستخدام إعدادات كاميرا قياسية.
في حين أن التنبؤ بمسار الكرة القائم على الرؤية الحاسوبية له العديد من المزايا، إلا أن هناك أيضاً بعض القيود التي يجب مراعاتها. إليك بعض العوامل التي يجب وضعها في الاعتبار:
- تحديات الانسداد: غالباً ما تصبح التنبؤات أقل دقة عندما تكون الكرة مخفية خلف اللاعبين أو أجسام أخرى.
- مشكلات الإضاءة والرؤية: يمكن أن يكون أداء هذه الأنظمة منخفضاً في ظل الإضاءة الضعيفة أو الخلفيات المعقدة، مثل الليل.
- متطلبات حوسبة عالية: تتطلب معالجة الفيديو عالي معدل الإطارات ونماذج التعلم العميق أجهزة قوية قد تكون باهظة الثمن.
Link to this sectionأبرز النقاط#
يجمع التنبؤ بمسار الكرة باستخدام الذكاء الاصطناعي البصري بين الفيزياء، والرؤية الحاسوبية، والتعلم الآلي لفهم الحركة والتنبؤ بها بدقة ملحوظة. من تحليل الأداء الرياضي إلى مساعدة تعافي المرضى وأنظمة الأتمتة الصناعية، يحول التنبؤ بالمسار البيانات المرئية إلى رؤى قابلة للتنفيذ. مع استمرار تطور التكنولوجيا، فهي تمهد الطريق لأساليب أكثر ذكاءً وأسرع وأكثر تكيفاً تعزز الأداء والسلامة واتخاذ القرار.
كن جزءاً من مجتمعنا المتنامي واستكشف مستودع GitHub الخاص بنا للحصول على موارد الذكاء الاصطناعي العملية. للبناء باستخدام الذكاء الاصطناعي البصري اليوم، استكشف خيارات الترخيص لدينا. تعلم كيف يغير الذكاء الاصطناعي في الزراعة الزراعة وكيف يشكل الذكاء الاصطناعي البصري في الروبوتات المستقبل من خلال زيارة صفحات الحلول الخاصة بنا.






