ما هي خوارزمية تحويل الميزات المتغيرة النطاق (SIFT)؟
استكشف خوارزمية SIFT. تعرَّف على ماهية SIFT، ومميزاتها القوية للرؤية الحاسوبية المتغيرة النطاق (scale-invariant). عزِّز معالجة الصور لديك.

للحصول على شرح مرئي للمفاهيم التي تتناولها هذه المقالة، شاهد الفيديو أدناه.

في هذه الأيام، تأتي العديد من الأجهزة الذكية التي نستخدمها، من الهواتف والكاميرات إلى أنظمة المنازل الذكية، مزودة بحلول ذكاء اصطناعي قادرة على التعرف على الوجوه، والأشياء، وحتى المشاهد المرئية الكاملة. تأتي هذه القدرة من computer vision، وهو مجال من مجالات الذكاء الاصطناعي يمكّن الآلات من فهم وتفسير الصور ومقاطع الفيديو.
على سبيل المثال، إذا التقطت صورة لبرج إيفل من أي زاوية أو مسافة، فعادةً ما يمكن لجهازك التعرف عليه باستخدام computer vision وتنظيمه في المجلد الصحيح في معرض صورك. ورغم أن هذا يبدو مباشراً، فإن التعرف على الأشياء ليس دائماً أمراً بسيطاً. إذ يمكن أن تبدو الصور مختلفة جداً بناءً على حجمها، أو زاويتها، أو مقياسها، أو إضاءتها، مما يجعل من الصعب على الآلات تحديدها بشكل متسق.
للمساعدة في حل هذه المشكلة، طور الباحثون خوارزمية computer vision تسمى Scale Invariant Feature Transform، أو SIFT. تجعل هذه الخوارزمية من الممكن اكتشاف الأشياء عبر ظروف عرض مختلفة. صمم ديفيد لوي خوارزمية SIFT في عام 1999 للعثور على النقاط الرئيسية الفريدة في الصورة ووصفها، مثل الزوايا، أو الحواف، أو الأنماط التي تظل قابلة للتعرف عليها حتى عند تغيير حجم الصورة، أو تدويرها، أو إضاءتها بشكل مختلف.
قبل أن تصبح نماذج computer vision القائمة على التعلم العميق مثل Ultralytics YOLO11 شائعة، كانت SIFT تقنية مستخدمة على نطاق واسع في computer vision. لقد كانت نهجاً قياسياً لمهام مثل التعرف على الأشياء، حيث يكون الهدف هو تحديد عنصر معين في صورة ما، ومطابقة الصور، حيث يتم محاذاة الصور عن طريق العثور على ميزات صور متداخلة.
في هذه المقالة، سنستكشف SIFT من خلال نظرة عامة سريعة على ماهيتها، وكيف تعمل على مستوى عالٍ، ولماذا هي مهمة في تطور computer vision. لنبدأ!
Link to this sectionلماذا تعد خوارزمية SIFT ضرورية لـ computer vision#
في الصورة، يمكن أن يظهر الشيء بطرق مختلفة كثيرة. على سبيل المثال، قد يتم تصوير كوب قهوة من الأعلى، أو من الجانب، أو في ضوء الشمس الساطع، أو تحت مصباح دافئ. يمكن للكوب نفسه أيضاً أن يبدو أكبر عندما يكون قريباً من الكاميرا وأصغر عندما يكون بعيداً عنها.
كل هذه الاختلافات تجعل تعليم الكمبيوتر التعرف على شيء ما مهمة معقدة. تتطلب مهمة computer vision هذه، المعروفة باسم object detection، من نماذج Vision AI تحديد المواقع للأشياء بدقة، حتى عند تغير حجمها أو زواياها أو ظروف الإضاءة.
لجعل هذا ممكناً، يعتمد computer vision على عملية تسمى feature extraction أو الاكتشاف. بدلاً من محاولة فهم الصورة بأكملها دفعة واحدة، يبحث النموذج عن ميزات صورة مميزة مثل الزوايا الحادة، أو الأنماط الفريدة، أو الأنسجة التي تظل قابلة للتعرف عليها عبر الزوايا والمقاييس وظروف الإضاءة المختلفة.
على وجه الخصوص، هذا هو ما صُممت خوارزمية Scale Invariant Feature Transform، أو SIFT، للقيام به. SIFT هي خوارزمية لاكتشاف ووصف الميزات يمكنها تحديد الأشياء بشكل موثوق في الصور، بغض النظر عن كيفية التقاطها.
Link to this sectionتحقيق الثبات تجاه المقياس#
تمتلك خوارزمية SIFT بعض الخصائص المهمة التي تجعلها مفيدة للتعرف على الأشياء. إحدى الخصائص الرئيسية تسمى الثبات تجاه المقياس. هذا يعني أن SIFT يمكنها التعرف على أجزاء مختلفة من شيء ما، سواء كان يبدو كبيراً وقريباً من الكاميرا أو صغيراً وبعيداً. حتى لو لم يكن الشيء مرئياً بالكامل، لا يزال بإمكان الخوارزمية اختيار نفس النقاط الرئيسية.
تقوم بذلك باستخدام مفهوم يسمى نظرية فضاء المقياس. ببساطة، يتم تشويش الصورة بمستويات مختلفة لإنشاء إصدارات متعددة. ثم تبحث SIFT عبر هذه الإصدارات للعثور على الأنماط والتفاصيل التي تظل ثابتة، بغض النظر عن كيفية تغير الصورة في الحجم أو الحدة.
على سبيل المثال، ستظهر إشارة طريق تم تصويرها من على بعد بضعة أمتار أكبر بكثير من نفس الإشارة التي تم التقاطها من مسافة بعيدة، لكن SIFT لا تزال قادرة على اكتشاف نفس الميزات المميزة. وهذا يجعل من الممكن مطابقة الصورتين بشكل صحيح، على الرغم من ظهور الإشارة بمقاييس مختلفة جداً.
Link to this sectionضمان الثبات تجاه التدوير#
يمكن للأشياء في الصور أن تظهر أيضاً مدورة، وأحياناً مقلوبة رأساً على عقب. تتعامل SIFT مع هذا من خلال خاصية تسمى الثبات تجاه التدوير. بالنسبة لكل نقطة رئيسية تكتشفها، تعين الخوارزمية اتجاهاً متسقاً بناءً على تدرجات الصورة المحلية. بهذه الطريقة، يمكن التعرف على نفس الشيء بغض النظر عن كيفية تدويره.
يمكنك التفكير في الأمر على أنه تحديد كل نقطة رئيسية بسهم صغير يوضح الاتجاه الذي تواجهه. من خلال محاذاة الميزات مع هذه الاتجاهات، تضمن SIFT مطابقة النقاط الرئيسية بشكل صحيح حتى عند تدوير الشيء. على سبيل المثال، يمكن التعرف على معلم تم التقاطه في صورة طبيعية بشكل صحيح حتى لو تم التقاط صورة أخرى له والكاميرا مائلة بزاوية.
Link to this sectionالمرونة تجاه تغيرات الصور الأخرى#
إلى جانب الحجم والتدوير، يمكن للصور أن تتغير بطرق أخرى، مثل تغيرات الإضاءة. قد تنتقل الإضاءة على شيء ما من السطوع إلى الخفوت، أو قد تتحول زاوية الكاميرا قليلاً، أو قد تكون الصورة مشوشة أو غير واضحة.
خوارزمية SIFT مصممة للتعامل مع هذه الأنواع من التغيرات. وهي تقوم بذلك من خلال التركيز على النقاط الرئيسية المميزة وعالية التباين، حيث أن هذه الميزات أقل تأثراً بتغيرات الإضاءة أو التحولات الصغيرة في زاوية الرؤية. ونتيجة لذلك، تميل SIFT إلى أن تكون أكثر موثوقية من طرق edge or corner detection البسيطة، والتي غالباً ما تفشل عند تغير الظروف.
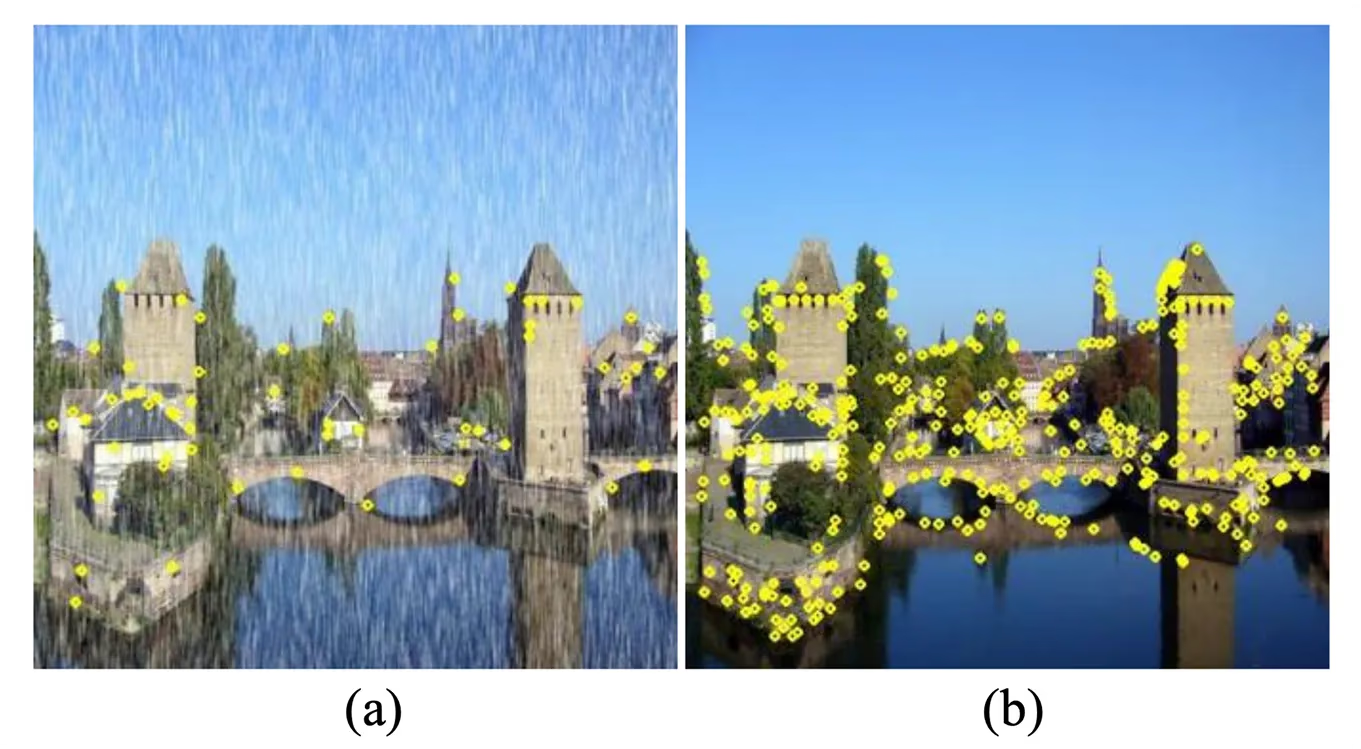
الشكل 1. نقاط SIFT الرئيسية المستخرجة من (أ) صورة ممطرة و (ب) صورتها الأصلية النظيفة المقابلة. (المصدر)
تخيل لوحة في معرض. لا يزال من الممكن التعرف عليها سواء تم تصويرها تحت ضوء النهار الخافت، أو تحت أضواء كاشفة صناعية ساطعة، أو حتى مع وجود ضبابية حركة طفيفة من كاميرا محمولة باليد. تظل النقاط الرئيسية مستقرة بما يكفي للمطابقة الدقيقة رغم هذه الاختلافات.
Link to this sectionكيف تعمل خوارزمية Scale-Invariant Feature Transform (SIFT)#
بعد ذلك، دعونا نلقي نظرة على كيفية عمل خوارزمية SIFT. يمكن تقسيم هذه العملية إلى أربع خطوات رئيسية: اكتشاف النقاط الرئيسية، وتحديد موقع النقاط الرئيسية، وتعيين الاتجاه، ووصف النقاط الرئيسية.
Link to this sectionالخطوة 1: اكتشاف التطرف في فضاء المقياس#
الخطوة الأولى هي العثور على النقاط الرئيسية واكتشافها، وهي بقع مميزة في الصورة، مثل الزوايا أو التغيرات الحادة في الملمس، والتي تساعد في تتبع أو التعرف على شيء ما.
للتأكد من إمكانية التعرف على هذه النقاط الرئيسية المحتملة بأي حجم، تبني SIFT ما يسمى فضاء المقياس. هذه مجموعة من الصور التي تم إنشاؤها عن طريق تشويش الصورة الأصلية تدريجياً باستخدام مرشح Gaussian، وهو تقنية تنعيم، وتجميع النتائج في طبقات تسمى الأوكتافات. تحتوي كل أوكتاف على نفس الصورة بمستويات متزايدة من التشويش، بينما تكون الأوكتاف التالية نسخة أصغر من الصورة.
عن طريق طرح صورة مشوشة من أخرى، تحسب SIFT فرق Gaussian (DoG)، الذي يبرز المناطق التي تتغير فيها السطوع بحدة. يتم اختيار هذه المناطق كنقاط رئيسية مرشحة لأنها تظل متسقة عند تكبير الصورة أو تصغيرها.
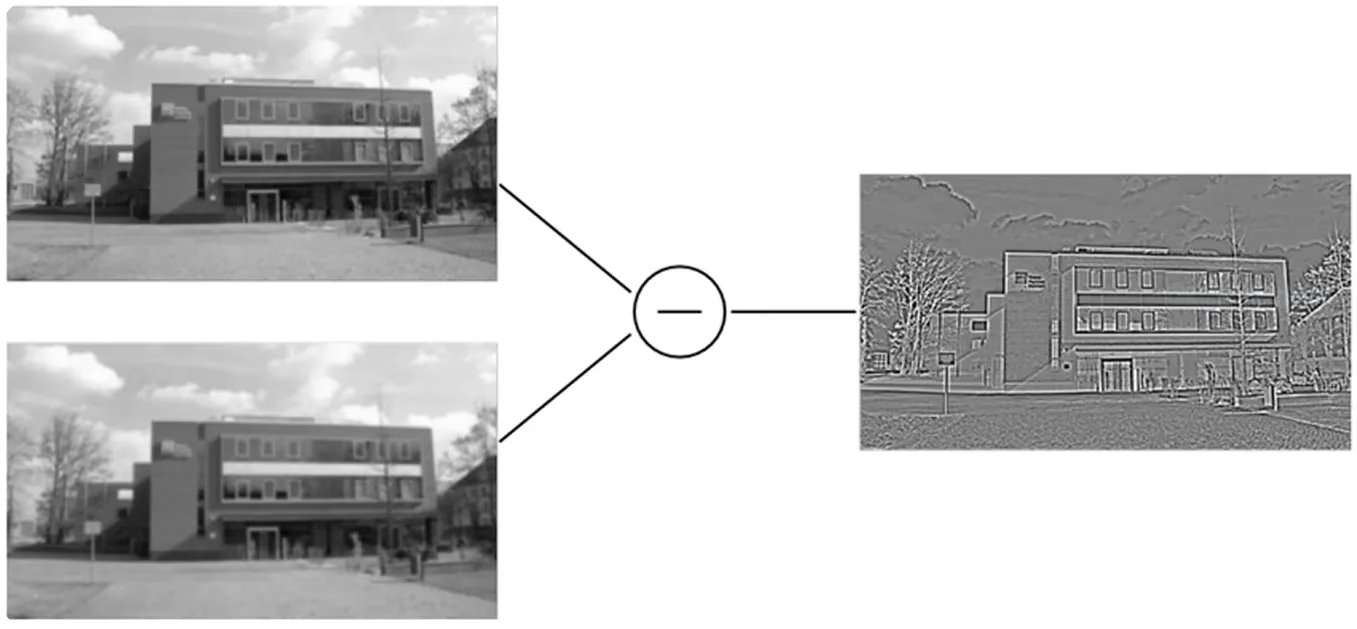
الشكل 2. يبرز DoG الهياكل الرئيسية عن طريق طرح الصور المشوشة بمستويات مختلفة. (المصدر)
Link to this sectionالخطوة 2: تحديد موقع النقاط الرئيسية#
ليست كل النقاط الرئيسية المرشحة مفيدة لأن بعضها قد يكون ضعيفاً أو غير مستقر. لتحسينها، تستخدم SIFT طريقة رياضية تسمى توسيع سلسلة تايلور، والتي تساعد في تقدير الموقع الدقيق لنقطة رئيسية بدقة أكبر.
خلال هذه الخطوة، يتم إزالة النقاط غير الموثوقة. يتم التخلص من النقاط الرئيسية ذات التباين المنخفض، التي تمتزج مع محيطها، وكذلك تلك التي تقع مباشرة على الحواف، حيث يمكن أن تتحول بسهولة شديدة. تترك خطوة التصفية هذه فقط النقاط الرئيسية الأكثر استقراراً وتميزاً.
Link to this sectionالخطوة 3: تعيين الاتجاه#
بمجرد تحديد النقاط الرئيسية المستقرة، تجعلها SIFT ثابتة تجاه التدوير، مما يعني أنه لا يزال من الممكن مطابقتها حتى لو تم تدوير الصورة جانبياً أو مقلوبة رأساً على عقب. للقيام بذلك، تحلل SIFT كيفية تغير السطوع حول كل نقطة رئيسية، وهو ما يعرف بالتدرج. تُظهر التدرجات كلاً من اتجاه وقوة التغير في كثافة البكسل، وهي معاً تلتقط الهيكل المحلي حول النقطة.
لكل نقطة رئيسية، تأخذ SIFT في الاعتبار التدرجات داخل منطقة محيطة وتجمعها في رسم بياني للاتجاهات. تشير أعلى قمة في هذا الرسم البياني إلى الاتجاه السائد لتغير الكثافة، والذي يتم تعيينه بعد ذلك كاتجاه للنقطة الرئيسية. يتم استخدام كل من اتجاهات التدرج، التي تُظهر مكان تغير الكثافة، ومقادير التدرج، التي تشير إلى مدى قوة هذا التغير، لبناء هذا الرسم البياني.
إذا كانت هناك قمم أخرى قوية تقريباً بنفس القدر، تعين SIFT اتجاهات متعددة لنفس النقطة الرئيسية. هذا يمنع ضياع الميزات المهمة عندما تظهر الأشياء بزوايا غير عادية. من خلال محاذاة كل نقطة رئيسية مع اتجاهها، تضمن SIFT أن تظل الموصفات التي تم إنشاؤها في الخطوة التالية متسقة.
بمعنى آخر، حتى لو تم تدوير صورتين لنفس الشيء بشكل مختلف، ستظل النقاط الرئيسية المحاذية للاتجاه متطابقة بشكل صحيح. هذه الخطوة هي ما يمنح SIFT قدرتها القوية على التعامل مع التدوير ويجعلها أكثر قوة بكثير من طرق اكتشاف الميزات السابقة.
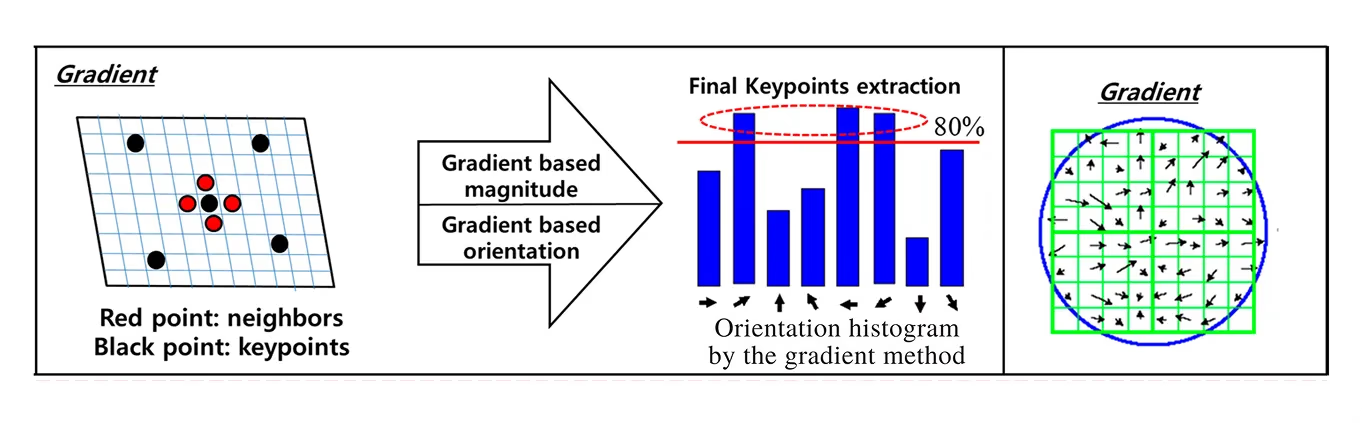
الشكل 3. نظرة فاحصة على الخطوة 3 من خوارزمية SIFT (المصدر)
Link to this sectionالخطوة 4: موصف النقطة الرئيسية#
الخطوة الأخيرة في SIFT هي إنشاء وصف لكل نقطة رئيسية حتى يمكن التعرف عليها في صور أخرى.
تحقق SIFT ذلك من خلال النظر إلى رقعة مربعة صغيرة حول كل نقطة رئيسية، بحجم 16 في 16 بكسل تقريباً. تتم محاذاة هذه الرقعة أولاً مع اتجاه النقطة الرئيسية بحيث لا يؤثر التدوير عليها. ثم يتم تقسيم الرقعة إلى شبكة من 4 في 4 مربعات أصغر.
في كل مربع صغير، تقيس SIFT كيفية تغير السطوع في اتجاهات مختلفة. يتم تخزين هذه التغيرات في شيء يسمى الرسم البياني، وهو يشبه مخططاً يوضح الاتجاهات الأكثر شيوعاً. يحصل كل مربع على رسمه البياني الخاص، وتنتج المربعات الستة عشر معاً 16 رسماً بيانياً.
أخيراً، يتم دمج هذه الرسوم البيانية في قائمة واحدة من الأرقام، 128 في المجموع. تسمى هذه القائمة متجه الميزات، وتعمل مثل بصمة إصبع للنقطة الرئيسية. ولأنها تلتقط الملمس والهيكل الفريد حول النقطة، تجعل بصمة الإصبع هذه من الممكن مطابقة نفس النقطة الرئيسية عبر صور مختلفة، حتى لو تم تغيير حجمها، أو تدويرها، أو إضاءتها بشكل مختلف.
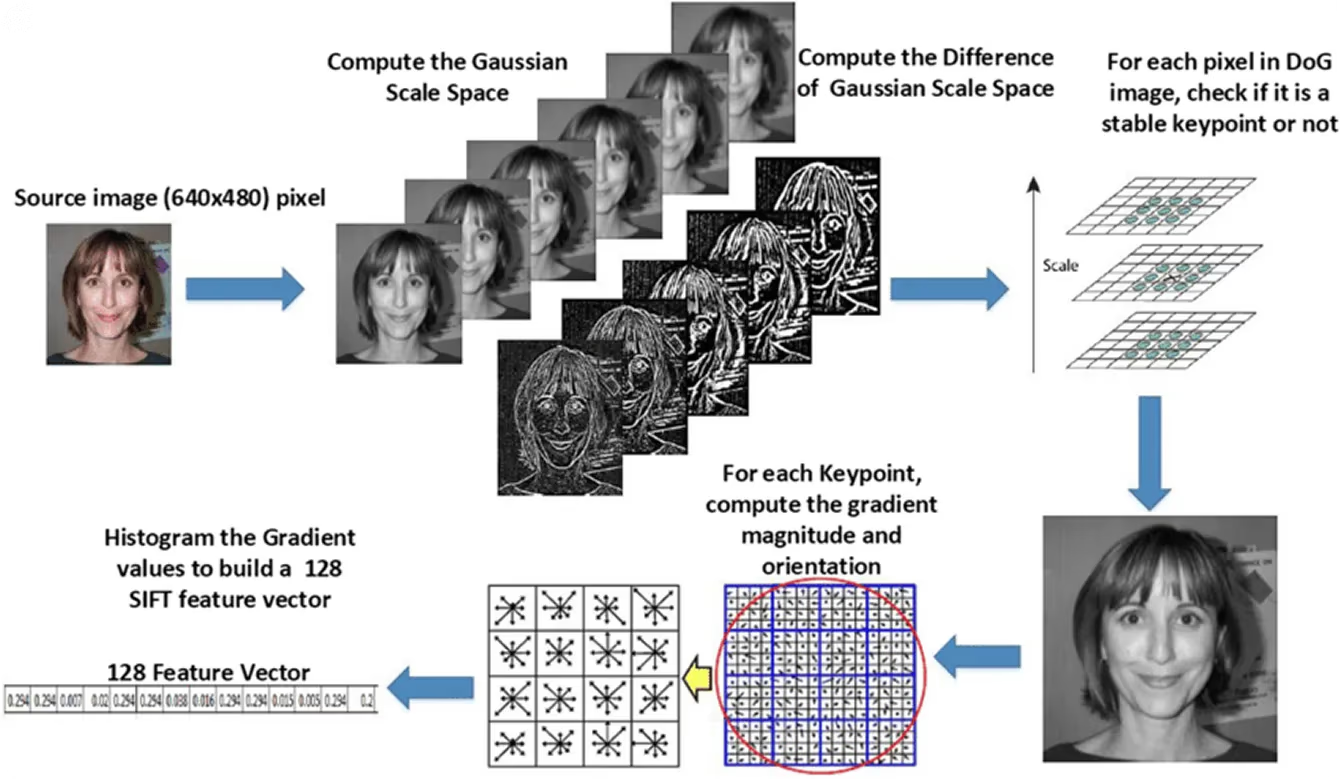
الشكل 4. نظرة عامة على كيفية عمل SIFT (المصدر)
Link to this sectionالتطبيقات الرئيسية لـ SIFT في computer vision#
الآن بعد أن أصبح لدينا فهم أفضل لماهية SIFT وكيف تعمل، دعونا نستكشف بعض تطبيقاتها الواقعية في computer vision.
Link to this sectionالتعرف على الأشياء واكتشافها#
أحد الاستخدامات الرئيسية لـ SIFT هو في التعرف على الأشياء واكتشافها. يتضمن ذلك تعليم الكمبيوتر التعرف على الأشياء وتحديد موقعها في الصور، حتى عندما لا تبدو الأشياء دائماً بنفس الشكل. على سبيل المثال، يمكن لـ SIFT اكتشاف كتاب بغض النظر عما إذا كان قريباً من الكاميرا، أو بعيداً عنها، أو مدوراً بزاوية.
السبب وراء نجاح هذا هو أن SIFT تستخرج نقاطاً رئيسية مميزة ومستقرة للغاية. عندما يتم إقران هذه النقاط الرئيسية بموصفات SIFT، فإنها تشكل ميزات SIFT، والتي توفر طريقة موثوقة لمطابقة نفس الشيء عبر صور مختلفة. تلتقط هذه الميزات تفاصيل فريدة للشيء تظل متسقة، مما يتيح مطابقة ميزات موثوقة عبر الصور حتى عندما يتغير حجم الشيء أو موضعه أو اتجاهه.
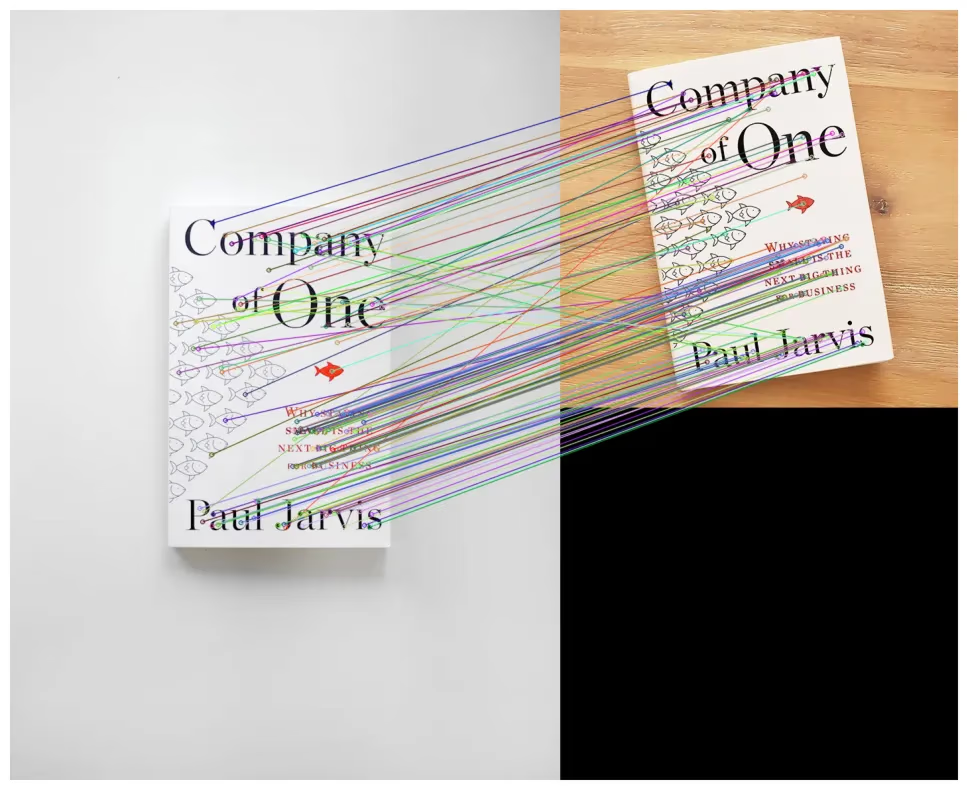
الشكل 5. استخدام SIFT للتعرف على غلاف كتاب في صورة جديدة تم التقاطها بزاوية مختلفة عن الصورة الأصلية. الصورة للمؤلف.
قبل أن يصبح deep learning شائعاً، كانت SIFT واحدة من أكثر الطرق موثوقية لبناء أنظمة التعرف على الأشياء. كانت تستخدم على نطاق واسع في الأبحاث والتطبيقات التي تتطلب مطابقة الأشياء عبر مجموعات بيانات صور كبيرة، على الرغم من أنها كانت تتطلب غالباً موارد حسابية كبيرة.
Link to this sectionتجميع الصور وإنشاء الصور البانورامية#
يمكن أيضاً استخدام SIFT لإنشاء صور بانورامية، وهي صور عريضة يتم صنعها عن طريق تجميع عدة صور معاً. باستخدام SIFT، يتم العثور على نقاط رئيسية مميزة في الأجزاء المتداخلة من صور مختلفة ثم مطابقتها مع بعضها البعض. تعمل هذه التطابقات كمرتكزات، توجه عملية التجميع حول كيفية محاذاة الصور.
بمجرد اكتمال المطابقة، يمكن استخدام خوارزميات التجميع لحساب المحاذاة الصحيحة، وغالباً باستخدام تحويلات هندسية تقوم برسم صورة واحدة على أخرى. ثم يتم دمج الصور بحيث تختفي الفواصل. النتيجة النهائية هي بانوراما سلسة تبدو كصورة عريضة واحدة، على الرغم من أنها تم إنشاؤها من لقطات متعددة.
Link to this sectionإعادة البناء ثلاثي الأبعاد والروبوتات#
تطبيق آخر مثير للاهتمام لـ SIFT هو في إعادة البناء ثلاثي الأبعاد، حيث يتم دمج صور ثنائية الأبعاد متعددة ملتقطة من زوايا مختلفة لبناء three-dimensional model. تعمل SIFT عن طريق العثور على نفس النقاط ومطابقتها عبر هذه الصور.
بمجرد إجراء المطابقات، يمكن تقدير المواقع ثلاثية الأبعاد لتلك النقاط باستخدام التثليث، وهي طريقة تحسب العمق من وجهات نظر مختلفة. تعد هذه العملية جزءاً من البنية من الحركة (SfM)، وهي تقنية تستخدم صوراً متداخلة متعددة لتقدير الشكل ثلاثي الأبعاد للمشهد جنباً إلى جنب مع مواقع الكاميرات التي التقطت الصور.
النتيجة عادة ما تكون سحابة نقاط ثلاثية الأبعاد، وهي مجموعة من النقاط في الفضاء تحدد مخطط الشيء أو البيئة. كانت SIFT واحدة من الأدوات الأولى التي جعلت البنية من الحركة عملية. وبينما أصبحت التقنيات الأحدث أسرع وأكثر شيوعاً اليوم، لا تزال SIFT تُطبق عندما تكون الدقة أهم من السرعة.
استُخدمت SIFT أيضاً في robotics، لا سيما في SLAM المرئي (تحديد الموقع والتعيين المتزامن). يسمح SLAM للروبوت بمعرفة مكان وجوده أثناء بناء خريطة لمحيطه في نفس الوقت.
تعمل نقاط SIFT الرئيسية كمعالم موثوقة يمكن للروبوت التعرف عليها عبر الإطارات، حتى عند تغير الإضاءة أو الزوايا. من خلال تتبع هذه المعالم، يمكن للروبوت تقدير موقعه وتحديث خريطته أثناء التنقل. على الرغم من أن كواشف الميزات الأسرع تُستخدم بشكل متكرر أكثر في الروبوتات اليوم، فقد لعبت SIFT دوراً مهماً في أنظمة SLAM المبكرة ولا تزال أساسية في الحالات التي تكون فيها المتانة أكثر أهمية من السرعة.
Link to this sectionمزايا واعتبارات SIFT#
بينما استُخدمت خوارزمية SIFT على نطاق واسع في computer vision وتُعرف بأنها طريقة موثوقة، فإنها تأتي أيضاً مع بعض المقايضات. لهذا السبب من المهم الموازنة بين إيجابياتها وسلبياتها قبل تحديد ما إذا كانت الخيار المناسب لمشروع ما. بعد ذلك، دعونا نستعرض نقاط قوتها وقيودها الرئيسية.
Link to this sectionالمزايا الأساسية لـ SIFT#
إليك بعض إيجابيات استخدام خوارزمية SIFT:
- الثبات تجاه المقياس والتدوير: توفر SIFT نقاطاً رئيسية ثابتة تجاه المقياس تظل مستقرة نسبياً عندما تظهر الأشياء بأحجام أو اتجاهات مختلفة، وهو ما يمثل خطوة مهمة للأمام مقارنة بكواشف الميزات السابقة.
- متانة معتدلة تجاه تغيرات الإضاءة وزاوية الرؤية: يمكن لـ SIFT التعامل مع تغيرات السطوع، والتباين، أو التحولات الصغيرة في زاوية الرؤية، على الرغم من أنها أقل موثوقية في الظروف الأكثر تطرفاً.
- القدرة على العمل في مشاهد مزدحمة أو مخفية جزئياً: نظراً لأن SIFT تكتشف العديد من النقاط الرئيسية المحلية، فإنها غالباً ما تظل قادرة على التعرف على شيء ما حتى لو كان جزء منه مغطى أو كانت الخلفية معقدة.
Link to this sectionاعتبارات الأداء والبدائل#
إليك بعض سلبيات استخدام خوارزمية SIFT:
- مكلفة حسابياً: تجعل عملية SIFT متعددة الخطوات وموصفاتها التفصيلية أبطأ وأكثر استهلاكاً للموارد من كواشف الميزات الحديثة. لتحسين ذلك، طور الباحثون خوارزمية SURF (ميزات قوية سريعة السرعة)، التي تستخدم حسابات أسرع للعثور على الميزات ووصفها. SURF أقل دقة من SIFT في بعض الحالات، لكنها تعمل بسرعة أكبر بكثير، مما يجعلها أكثر عملية للمهام الحساسة للوقت.
- غير مثالية للاستخدام في الوقت الفعلي: بسبب تكلفتها الحسابية، تواجه SIFT صعوبة في التطبيقات التي تكون فيها السرعة أمراً بالغ الأهمية، مثل real-time tracking أو الروبوتات المحمولة.
- تنوع محدود: بينما تتسم بالقوة في العديد من الحالات، فإن SIFT أقل فعالية في تغيرات الإضاءة المتطرفة، أو تحولات زاوية الرؤية الكبيرة، أو المشاهد الديناميكية للغاية حيث تعمل الخوارزميات الأحدث أو طرق تعلم الآلة بشكل أفضل.
أثناء استكشاف إيجابيات وسلبيات SIFT، قد تلاحظ أن العديد من قيودها مهدت الطريق لتقنيات أكثر تقدماً. على وجه التحديد، برزت الشبكات العصبية التلافيفية (CNNs) كبديل قوي.
CNN هو نوع من نماذج التعلم العميق مستوحى من كيفية عمل النظام البصري البشري. فهي تعالج الصورة في طبقات، بدءاً من الأنماط البسيطة مثل الحواف والأنسجة، وتتطور تدريجياً إلى أشكال وأشياء أكثر تعقيداً. على عكس قواعد الميزات المصنوعة يدوياً في SIFT، تتعلم CNNs تمثيلات الميزات مباشرة من البيانات.
يعني هذا التعلم المعتمد على البيانات أن CNNs يمكن أن تتفوق على SIFT في مهام مطابقة الموصفات وclassification. كما أن CNNs أكثر تعبيرية وقوة، حيث تتكيف بشكل أفضل مع التباين والتعقيد في البيانات المرئية.
على سبيل المثال، حققت النماذج القائمة على CNN نتائج اختراق في ImageNet، وهي مجموعة بيانات مرجعية ضخمة تحتوي على ملايين الصور المصنفة عبر آلاف الفئات. صُممت ImageNet لاختبار مدى قدرة الخوارزميات على التعرف على الأشياء وتصنيفها، وهي قادرة على تسليط الضوء على الفجوة بين الطرق القديمة القائمة على الميزات والتعلم العميق.
تجاوزت CNNs خوارزمية SIFT بسرعة من خلال تعلم تمثيلات أكثر ثراءً ومرونة، مما مكنها من التعرف على الأشياء في ظل ظروف الإضاءة المتغيرة، ومن وجهات نظر مختلفة، وحتى عندما تكون مخفية جزئياً، وهي سيناريوهات غالباً ما تواجه فيها SIFT صعوبات.
Link to this sectionأبرز النقاط#
تحتل خوارزمية Scale Invariant Feature Transform مكاناً مهماً في تاريخ computer vision. فقد وفرت طريقة موثوقة لاكتشاف الميزات حتى في البيئات المتغيرة وأثرت على العديد من الطرق المستخدمة اليوم.
في حين أن التقنيات الأحدث أسرع وأكثر كفاءة، فقد وضعت SIFT الأساس لها. تعرض SIFT المكان الذي بدأ منه التقدم في computer vision اليوم وتبرز مدى التقدم الذي وصلت إليه أنظمة الذكاء الاصطناعي المتطورة.
انضم إلى مجتمعنا العالمي وتحقق من مستودع GitHub الخاص بنا لمعرفة المزيد حول computer vision. استكشف صفحات حلولنا لاكتشاف ابتكارات مثل AI in agriculture و computer vision in retail. تحقق من خيارات الترخيص لدينا وابدأ في بناء نموذج computer vision الخاص بك.






