ما هي مطابقة الصور في الذكاء الاصطناعي البصري؟ مقدمة سريعة
تعرف على كيفية عمل مطابقة الصور في الذكاء الاصطناعي البصري واستكشف التقنيات الأساسية التي تساعد الآلات على اكتشاف ومقارنة وفهم البيانات البصرية.

عندما تنظر إلى صورتين لنفس الكائن، مثل لوحة وصورة فوتوغرافية لسيارة، من السهل ملاحظة ما تشترك فيه هاتان الصورتان. ومع ذلك، بالنسبة للآلات، فإن الأمر ليس بهذه البساطة.
لإجراء مثل هذه المقارنات، تعتمد الآلات على رؤية الحاسوب، وهو فرع من الذكاء الاصطناعي (AI) يساعدها في تفسير وفهم المعلومات المرئية. تُمكّن رؤية الحاسوب الأنظمة من اكتشاف الكائنات وفهم المشاهد واستخراج الأنماط من الصور أو مقاطع الفيديو.
على وجه الخصوص، تتجاوز بعض المهام البصرية مجرد تحليل صورة واحدة، حيث تتضمن مقارنة الصور للعثور على أوجه التشابه أو تحديد الاختلافات أو تتبع التغييرات بمرور الوقت.
تغطي رؤية الذكاء الاصطناعي مجموعة واسعة من التقنيات، وتركز إحدى القدرات الأساسية، المعروفة باسم مطابقة الصور، على تحديد أوجه التشابه بين الصور، حتى عند تغير الإضاءة أو الزوايا أو الخلفيات. يمكن استخدام هذه التقنية في تطبيقات متنوعة، بما في ذلك الروبوتات والواقع المعزز ورسم الخرائط الجغرافية.
في هذه المقالة، سنستكشف ماهية مطابقة الصور، وتقنياتها الأساسية، وبعض تطبيقاتها في العالم الحقيقي. لنبدأ!
Link to this sectionما هي مطابقة الصور؟#
تجعل مطابقة الصور من الممكن لنظام الكمبيوتر فهم ما إذا كانت صورتان تحتويان على محتوى متشابه. يمكن للبشر القيام بذلك بشكل حدسي من خلال ملاحظة الأشكال والألوان والأنماط.
من ناحية أخرى، تعتمد أجهزة الكمبيوتر على البيانات الرقمية. فهي تحلل الصور من خلال فحص كل بكسل، وهو أصغر وحدة في الصورة الرقمية.
يتم تخزين كل صورة كشبكة من البكسلات، وعادة ما يحمل كل بكسل قيماً للأحمر والأخضر والأزرق (RGB). يمكن أن تتغير هذه القيم عند تدوير الصورة أو تغيير حجمها أو عرضها من زاوية مختلفة أو التقاطها في ظروف إضاءة مختلفة. وبسبب هذه الاختلافات، غالباً ما تكون مقارنة الصور بكسلًا بكسل غير موثوقة.
لجعل المقارنات أكثر اتساقًا، تركز مطابقة الصور على الميزات المحلية أو الزوايا والحواف والمناطق المنسوجة التي تميل إلى البقاء ثابتة حتى عندما تتغير الصورة قليلاً. من خلال اكتشاف هذه الميزات، أو النقاط الرئيسية، عبر صور متعددة، يمكن للنظام مقارنتها بدقة أكبر بكثير.
تُستخدم هذه العملية على نطاق واسع في حالات الاستخدام مثل الملاحة، والتوطين، والواقع المعزز، ورسم الخرائط، وإعادة البناء ثلاثي الأبعاد، والبحث المرئي. عندما تحدد الأنظمة نفس النقاط عبر صور مختلفة أو إطارات متعددة، يمكنها تتبع الحركة وفهم هيكل المشهد واتخاذ قرارات موثوقة في البيئات الديناميكية.
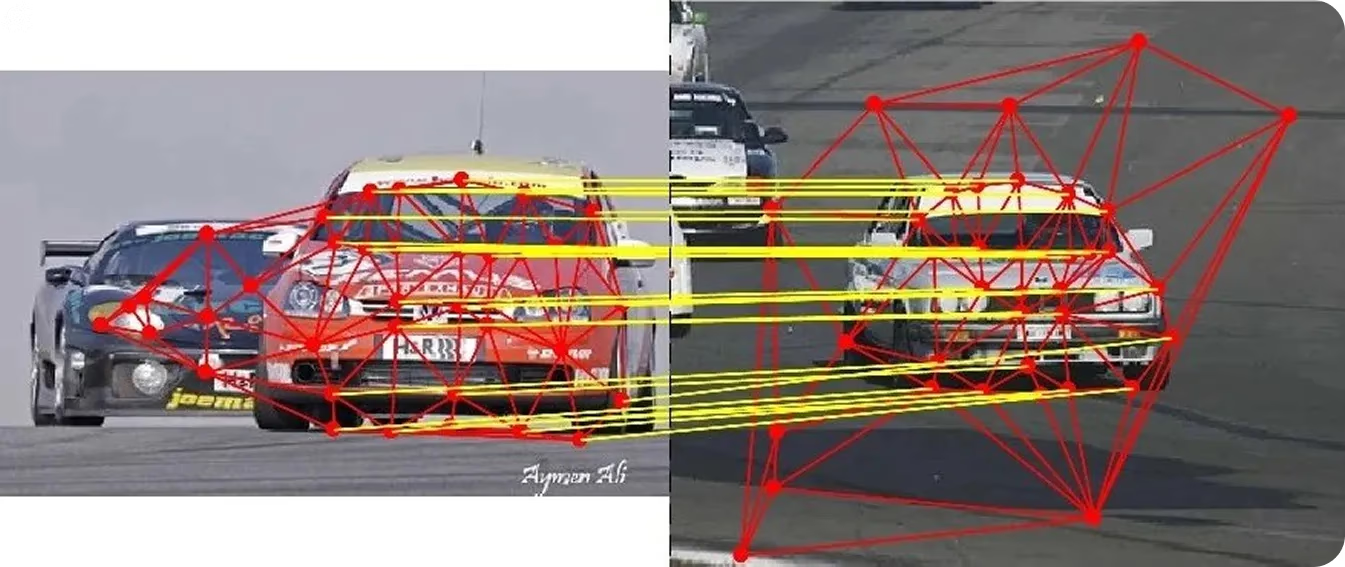
الشكل 1. مثال على مطابقة صور سيارة حيث يتم تحديد نقاط رئيسية متشابهة. (المصدر)
Link to this sectionفهم كيفية عمل مطابقة الصور#
تتضمن مطابقة الصور العديد من الخطوات الرئيسية التي تساعد الأنظمة على تحديد ومقارنة المناطق المتشابهة داخل الصور. تعمل كل خطوة على تحسين الدقة والاتساق والمتانة في ظل ظروف مختلفة.
إليك نظرة خطوة بخطوة على كيفية عمل مطابقة الصور:
- اكتشاف الميزات: يحدد النظام أولاً نقاطاً رئيسية مميزة في الصورة تظل ثابتة حتى عند تغير الإضاءة أو النطاق أو زاوية الرؤية. وهي تسلط الضوء على مناطق مثل الزوايا أو الحواف أو المناطق المنسوجة التي تبرز بصرياً.
- وصف الميزات: يتم بعد ذلك تحويل كل نقطة رئيسية إلى واصف، وهو متجه رقمي مدمج يلتقط النمط المرئي حول تلك النقطة. توفر هذه الواصفات طريقة موثوقة لمقارنة الميزات بين الصور المختلفة.
- مطابقة الميزات: تتم مقارنة الواصفات من صورتين باستخدام خوارزميات مطابقة تحسب مدى تشابهها. تقوم هذه الخطوة بإقران النقاط الرئيسية التي تبدو متطابقة وتصفية المطابقات الأضعف أو غير الموثوقة.
- التحقق الهندسي: أخيراً، يتحقق النظام مما إذا كانت النقاط الرئيسية المطابقة تشكل علاقة هندسية واقعية. يقوم النظام بإزالة المطابقات غير الصحيحة (تسمى القيم المتطرفة) باستخدام طريقة تُعرف باسم RANSAC (إجماع العينة العشوائية)، مما يضمن الاحتفاظ بأزواج النقاط الموثوقة فقط. بمجرد تحديد المطابقات الجيدة، يقوم النظام بتقدير التحويل الذي يربط الصورتين بشكل أفضل. غالباً ما يكون هذا تحويلاً تآلفياً، والذي يقوم بالتكيف مع تغييرات مثل التوسع والتدوير والإزاحة، أو التماثل، الذي يمكنه أيضاً التعامل مع تغييرات المنظور. يتيح استخدام هذه التحويلات للنظام محاذاة الصور بدقة، حتى عندما تم التقاطها من وجهات نظر مختلفة قليلاً.
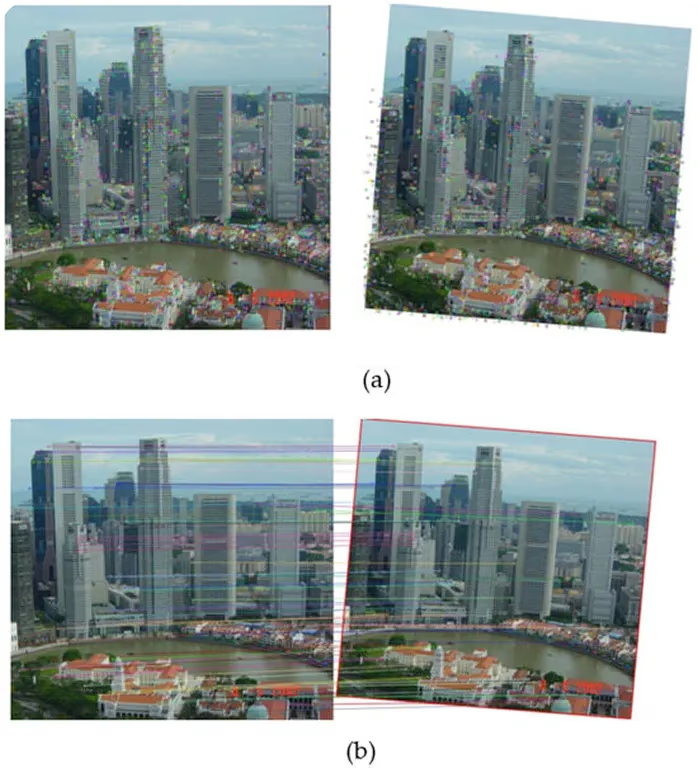
الشكل 2. (أ) استخراج نقاط الميزات و(ب) مطابقة الميزات. (المصدر)
Link to this sectionالتقنيات الأساسية المستخدمة في مطابقة الصور#
قبل أن نستكشف تطبيقات مطابقة الصور في العالم الحقيقي، دعونا نلقي نظرة فاحصة على تقنيات مطابقة الصور المستخدمة في أنظمة رؤية الحاسوب.
Link to this sectionمطابقة الصور القائمة على مطابقة القوالب#
تعد مطابقة القوالب واحدة من أكثر طرق مطابقة الصور مباشرة. تُعتبر عموماً تقنية معالجة صور بدلاً من كونها طريقة حديثة لرؤية الحاسوب لأنها تعتمد على مقارنات البكسل المباشرة ولا تستخرج ميزات بصرية أعمق.
يتم استخدامها لتحديد صورة مرجعية أصغر، أو قالب، داخل مشهد أكبر. تعمل باستخدام خوارزمية تقوم بتمرير قالب عبر الصورة الرئيسية وحساب درجة التشابه في كل موضع لقياس مدى قرب تطابق المنطقتين. تُعتبر المنطقة التي حصلت على أعلى درجة هي المطابقة الأفضل، مما يشير إلى المكان الذي من المرجح أن يظهر فيه الكائن في المشهد.
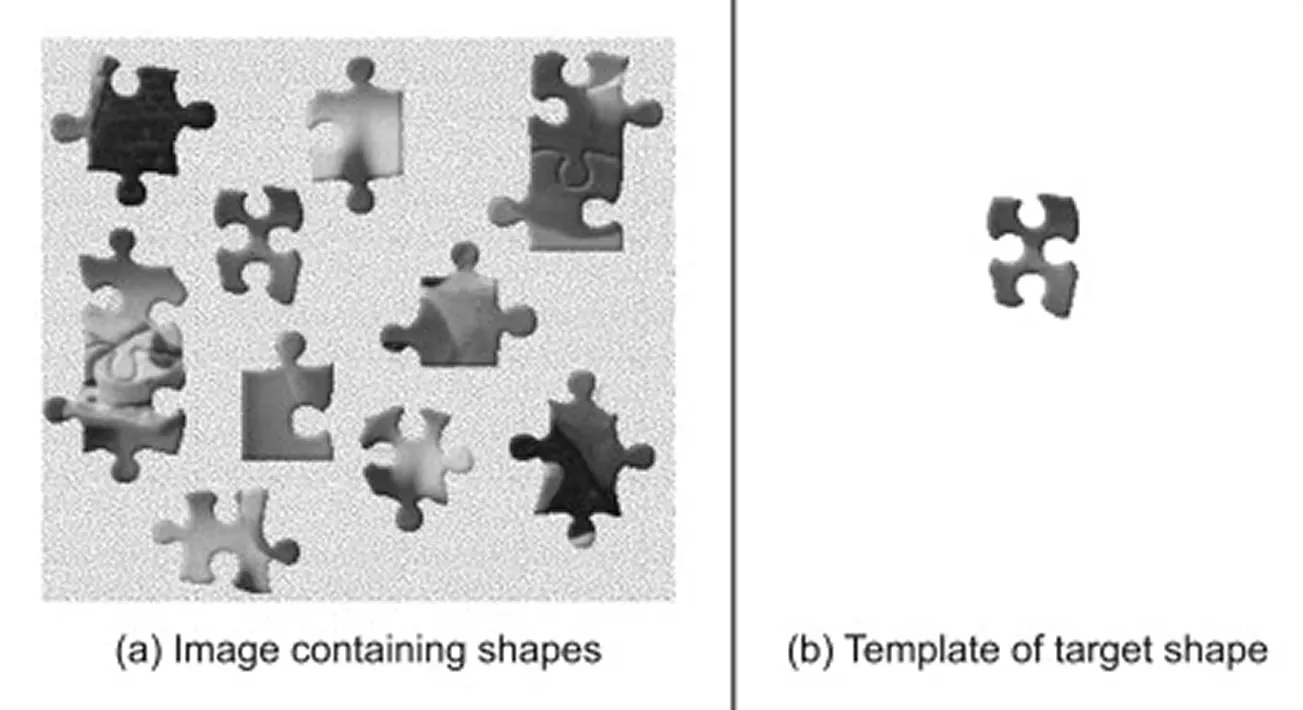
الشكل 3. نظرة على استخدام مطابقة القوالب. (المصدر)
تعمل هذه التقنية بشكل جيد عندما تظل مقاييس الكائن ودورانه وإضاءته ثابتة، مما يجعلها خياراً جيداً للبيئات الخاضعة للرقابة أو المقارنات الأساسية. ومع ذلك، ينخفض أداؤها عندما يبدو الكائن مختلفاً عن القالب، مثل عندما يتغير حجمه، أو يتم تدويره، أو يكون محجوباً جزئياً، أو يظهر مقابل خلفية صاخبة أو معقدة.
Link to this sectionالتقنيات الكلاسيكية القائمة على الميزات لمطابقة الصور#
قبل أن يصبح التعلم العميق معتمداً على نطاق واسع، كانت مطابقة الصور تعتمد في الغالب على خوارزميات رؤية الحاسوب الكلاسيكية التي تكتشف نقاطاً رئيسية مميزة في الصورة. بدلاً من مقارنة كل بكسل، تحلل هذه الطرق تدرجات الصور، أو التغيرات في الشدة، لتسليط الضوء على الزوايا والحواف والمناطق المنسوجة التي تبرز.
يتم بعد ذلك تمثيل كل نقطة رئيسية تم اكتشافها باستخدام ملخص رقمي مدمج يسمى واصف. عند مقارنة صورتين، يقوم المطابق بتقييم هذه الواصفات للعثور على أكثر الأزواج تشابهاً.
تشير درجة التشابه العالية عادةً إلى أن نفس النقطة المادية تظهر في كلتا الصورتين. يستخدم المطابقون أيضاً مقاييس مسافة محددة أو قواعد تسجيل للحكم على مدى قرب محاذاة الميزات، مما يحسن الموثوقية العامة.
فيما يلي بعض خوارزميات رؤية الحاسوب الكلاسيكية الرئيسية المستخدمة لمطابقة الصور:
-
SIFT (تحويل الميزات الثابتة للمقياس): تحدد النقاط الرئيسية من خلال تحليل تدرجات شدة الصورة، مما يسمح لها بالبقاء قابلة للتعرف عند تكبير الصورة أو تصغيرها أو تدويرها.
-
SURF (ميزات قوية سريعة): تشبه هذه الخوارزمية SIFT ولكنها محسنة للسرعة. تستخدم تقريبات سريعة للعمليات القائمة على التدرج، مما يجعلها مناسبة للتطبيقات التي تتطلب أوقات استجابة سريعة.
-
ORB (FAST الموجه وBRIEF المدوّر): تجمع بين خوارزميتين تسميان FAST وBRIEF. تجد FAST بسرعة نقاطاً تشبه الزاوية في الصورة، بينما تنشئ BRIEF وصفاً مدمجاً لكل نقطة بحيث يمكن مطابقتها عبر الصور. تعزز ORB أيضاً كلتا الخطوتين عن طريق إضافة معالجة الدوران، مما يجعلها سريعة وموثوقة.

الشكل 4. نقاط ميزات SURF المستخرجة والمطابقة بين صورتين. (المصدر)
Link to this sectionالتقنيات القائمة على التعلم العميق لمطابقة الصور#
على عكس الطرق الكلاسيكية التي تعتمد على قواعد محددة، يتعلم التعلم العميق الميزات تلقائياً من مجموعات بيانات كبيرة، وهي مجموعات من البيانات المرئية التي تتعلم منها نماذج الذكاء الاصطناعي الأنماط. تعمل هذه النماذج عادةً على وحدات معالجة الرسومات (GPUs)، والتي توفر قدرة حوسبة عالية مطلوبة لمعالجة دفعات كبيرة من الصور وتدريب الشبكات العصبية المعقدة بكفاءة.
يمنح هذا نماذج الذكاء الاصطناعي القدرة على التعامل مع تغييرات العالم الحقيقي مثل الإضاءة وزوايا الكاميرا والانسداد. تجمع بعض النماذج أيضاً جميع الخطوات في سير عمل واحد، مما يدعم الأداء القوي في الظروف الصعبة.
فيما يلي بعض الأساليب القائمة على التعلم العميق لاستخراج ميزات الصور ومطابقتها:
-
استخراج الميزات القائم على CNN: تتعلم هذه النماذج تلقائياً الأنماط المرئية الرئيسية من مجموعات البيانات الكبيرة. فهي تتعرف على الميزات التي من غير المرجح أن تتغير، مما يجعلها موثوقة لمطابقة الكائنات عبر مشاهد مختلفة.
-
المطابقة القائمة على التضمين: بدلاً من مقارنة البكسلات مباشرة، تحول هذه الطريقة الصور إلى تمثيلات رقمية مدمجة تُعرف باسم التضمينات. يقوم المطابق بعد ذلك بمقارنة هذه التضمينات للعثور على صور متشابهة. تتبع نماذج مثل FaceNet، التي تولد تضمينات للتعرف على الوجوه ومقارنتها، وCLIP، التي تضع الصور والنص في مساحة مشتركة لمهام مثل البحث عن الصور والمطابقة الدلالية، هذا النهج.
-
خطوط أنابيب المطابقة الشاملة: غالباً ما تجمع أنظمة التعلم العميق المتطورة بين اكتشاف النقاط الرئيسية والوصف والمطابقة في سير عمل موحد. تتعلم نماذج مثل SuperPoint وD2-Net كلاً من النقاط الرئيسية والواصفات مباشرة من خرائط ميزات CNN، بينما تعمل SuperGlue كمطابق متعلم يقوم بإقران هذه الواصفات بشكل أكثر موثوقية من الطرق التقليدية. معاً، تنشئ هذه المكونات خط أنابيب شاملاً يوفر دقة أعلى ومتانة أكبر في الظروف الصعبة مقارنة بالطرق الكلاسيكية القائمة على الميزات.
-
المطابقة القائمة على المحولات (Transformer): يستخدم هذا الأسلوب آليات الانتباه لربط المناطق المقابلة عبر صورتين، مما يسمح لها بمحاذاة الرقع حتى في ظل تغييرات قوية في زاوية الرؤية أو الإضاءة أو النسيج. تحقق نماذج مثل LoFTR (محول الميزات المحلية) دقة أعلى بكثير لأن مجال الاستقبال العالمي للمحول يتيح مطابقة موثوقة في المناطق ذات النسيج المنخفض أو الضبابية أو المتكررة حيث تفشل الكاشفات التقليدية. تنتج LoFTR مطابقات شبه كثيفة وعالية الثقة وتتفوق على أحدث الأساليب السابقة بفارق كبير في كل من الاختبارات المعيارية الداخلية والخارجية.
-
النماذج التي تركز على الكفاءة: تهدف نماذج مطابقة الصور الأحدث إلى تقديم دقة عالية مع العمل بشكل أسرع. صُممت نماذج مثل LightGlue للعمل بكفاءة على الأجهزة ذات قدرة الحوسبة المحدودة مع الحفاظ على جودة مطابقة جيدة.
Link to this sectionتطبيقات مطابقة الصور في العالم الحقيقي#
الآن بعد أن أصبح لدينا فهم أفضل لكيفية عمل مطابقة الصور، دعونا نلقي نظرة على بعض التطبيقات الواقعية التي تلعب فيها دوراً مهماً.
Link to this sectionروبوتات أكثر ذكاءً مدفوعة بمطابقة الصور#
تعمل الروبوتات غالباً في بيئات مزدحمة ومتغيرة، حيث تحتاج إلى فهم الكائنات الموجودة وكيفية وضعها. يمكن أن تساعد مطابقة الصور الروبوتات على فهم الكائنات التي تراها من خلال مقارنتها بصور مخزنة أو مرجعية. وهذا يجعل من السهل على هذه الروبوتات التعرف على الكائنات وتتبع حركتها والتكيف حتى عند تغير الإضاءة أو زوايا الكاميرا.
على سبيل المثال، في المستودع، يمكن لنظام الالتقاط والوضع الروبوتي استخدام مطابقة الصور لتحديد العناصر المختلفة والتعامل معها. يلتقط الروبوت أولاً كائناً، ثم يقارن صورته بعينات مرجعية لتحديده.
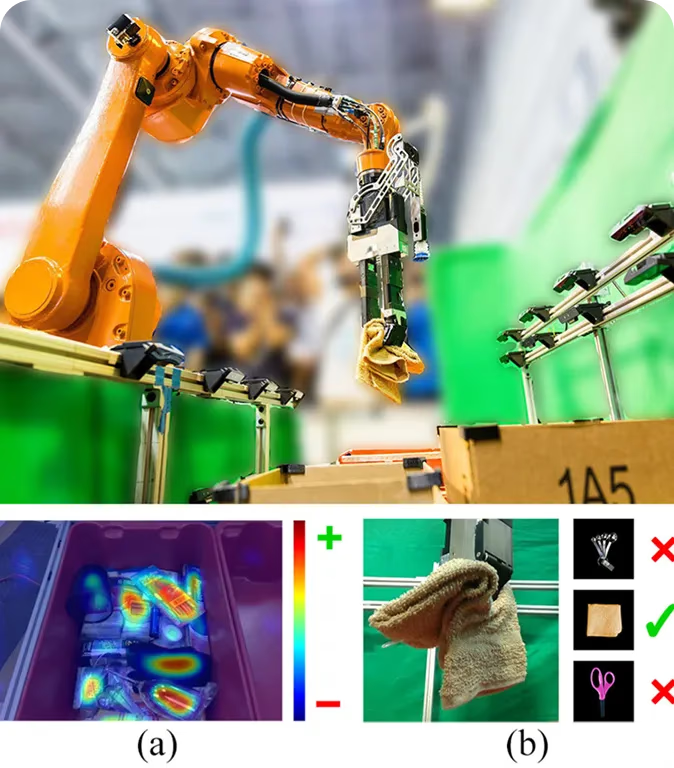
الشكل 5. روبوت يتعرف على الكائنات ويلتقطها عن طريق مطابقتها مع الصور المرجعية. (المصدر)
بمجرد العثور على المطابقة، يعرف الروبوت كيفية فرزها أو وضعها بشكل صحيح. يسمح هذا النهج للروبوتات بالتعرف على كل من الكائنات المألوفة والجديدة دون إعادة تدريب النظام بأكمله. كما يساعدها على اتخاذ قرارات أفضل في الوقت الفعلي، مثل تنظيم الأرفف أو تجميع الأجزاء أو إعادة ترتيب العناصر.
Link to this sectionتحسين إعادة البناء ثلاثي الأبعاد مع مطابقة صور أفضل#
في مجالات مثل رسم خرائط الطائرات بدون طيار والواقع الافتراضي وفحص المباني، تحتاج الأنظمة غالباً إلى إعادة بناء نموذج ثلاثي الأبعاد من صور ثنائية الأبعاد متعددة. للقيام بذلك، فإنها تعتمد على مطابقة الصور لتحديد النقاط الرئيسية المشتركة، مثل الزوايا أو المناطق المنسوجة، التي تظهر عبر عدة صور.
تساعد هذه النقاط المشتركة النظام على فهم كيفية ارتباط الصور ببعضها البعض في مساحة ثلاثية الأبعاد. ترتبط هذه الفكرة ارتباطاً وثيقاً بـ "الهيكل من الحركة" (SfM)، وهي تقنية تبني هياكل ثلاثية الأبعاد من خلال تحديد ومطابقة النقاط الرئيسية عبر الصور الملتقطة من وجهات نظر مختلفة.
إذا لم تكن المطابقة دقيقة، فقد يبدو النموذج ثلاثي الأبعاد الناتج مشوهاً أو غير مكتمل. ولهذا السبب، يعمل الباحثون على تحسين موثوقية مطابقة الصور لإعادة البناء ثلاثي الأبعاد، وقد أظهرت التطورات الأخيرة نتائج واعدة.
أحد الأمثلة المثيرة للاهتمام هو HashMatch، وهي خوارزمية مطابقة صور أسرع وأكثر قوة. تقوم HashMatch بتحويل تفاصيل الصورة إلى أنماط مدمجة تسمى رموز التجزئة، مما يجعل من السهل تحديد المطابقات الصحيحة وإزالة القيم المتطرفة، حتى عند تغير الإضاءة أو وجهات النظر.
عند اختبارها على مجموعات بيانات واسعة النطاق، أنتجت HashMatch نماذج إعادة بناء ثلاثية الأبعاد أكثر نظافة وواقعية مع أخطاء محاذاة أقل. وهذا يجعلها مفيدة بشكل خاص لتطبيقات مثل رسم خرائط الطائرات بدون طيار وأنظمة الواقع المعزز والحفاظ على التراث الثقافي، حيث تكون الدقة أمراً بالغ الأهمية.
Link to this sectionدور مطابقة الصور في الواقع المعزز#
عندما يتعلق الأمر بـ الواقع المعزز (AR)، فإن الحفاظ على محاذاة الكائنات الافتراضية مع العالم الحقيقي غالباً ما يكون تحدياً. يمكن للبيئات الخارجية أن تتغير باستمرار اعتماداً على الظروف البيئية، مثل ضوء الشمس والطقس. يمكن للاختلافات الطفيفة في العالم الحقيقي أن تجعل العناصر الافتراضية تبدو غير مستقرة أو في غير محلها قليلاً.
لحل هذه المشكلة، تستخدم أنظمة الواقع المعزز مطابقة الصور لتفسير محيطها. من خلال مقارنة إطارات الكاميرا الحية بالصور المرجعية المخزنة، يمكنها فهم مكان المستخدم وكيف تغير المشهد.

الشكل 6. نقاط الميزات التي تمت مطابقتها بين صورتين. (المصدر: theijes.com)
على سبيل المثال، في دراسة شملت تدريب الواقع المعزز في الهواء الطلق على الطراز العسكري باستخدام نظارات الواقع الممتد (XR)، استخدم الباحثون SIFT وطرقاً أخرى قائمة على الميزات لمطابقة التفاصيل المرئية بين الصور الحقيقية والمرجعية. حافظت المطابقات الدقيقة على محاذاة العناصر الافتراضية بشكل صحيح مع العالم الحقيقي، حتى عندما تحرك المستخدم بسرعة أو تغيرت الإضاءة.
Link to this sectionأبرز النقاط#
تعد مطابقة الصور مكوناً أساسياً في رؤية الحاسوب، حيث تمكن الأنظمة من فهم كيفية ارتباط الصور المختلفة ببعضها البعض أو كيفية تغير المشهد بمرور الوقت. إنها تلعب دوراً حاسماً في الروبوتات والواقع المعزز وإعادة البناء ثلاثي الأبعاد والملاحة المستقلة والعديد من التطبيقات الواقعية الأخرى حيث تكون الدقة والاستقرار ضروريين.
مع نماذج الذكاء الاصطناعي المتقدمة مثل SuperPoint وLoFTR، أصبحت أنظمة اليوم أكثر قوة بكثير من الطرق السابقة. مع استمرار تطور تقنيات التعلم الآلي ووحدات الرؤية المتخصصة والشبكات العصبية ومجموعات البيانات، من المرجح أن تصبح مطابقة الصور أسرع وأكثر دقة وقابلية للتكيف.
انضم إلى مجتمعنا المتنامي واستكشف مستودع GitHub الخاص بنا للحصول على موارد الذكاء الاصطناعي العملية. للبناء باستخدام رؤية الذكاء الاصطناعي اليوم، استكشف خيارات الترخيص الخاصة بنا. تعرف على كيفية تحويل الذكاء الاصطناعي في الزراعة للزراعة وكيف تشكل رؤية الذكاء الاصطناعي في الرعاية الصحية المستقبل من خلال زيارة صفحات الحلول الخاصة بنا.






