Improving collision prediction with Ultralytics YOLO models
Learn how insights from Ultralytics YOLO models help collision prediction systems make safer, quicker decisions in dynamic environments.
Despite being careful on the road, accidents can still happen. A car changes lanes, a pedestrian jaywalks, or a cyclist speeds up without warning. These everyday moments are examples of when collision prediction systems can make a real difference and help keep everyone safe.
Previously, we looked at ball trajectory prediction and saw how forecasting the path of a fast-moving ball helps sports analytics understand movement and anticipate what happens next. Collision prediction works in a similar way.
These prediction systems essentially look into the future. By watching how vehicles and pedestrians move, they can catch risks early and adjust their path or behavior before (otherwise known as motion planning or path planning) things take a dangerous turn.
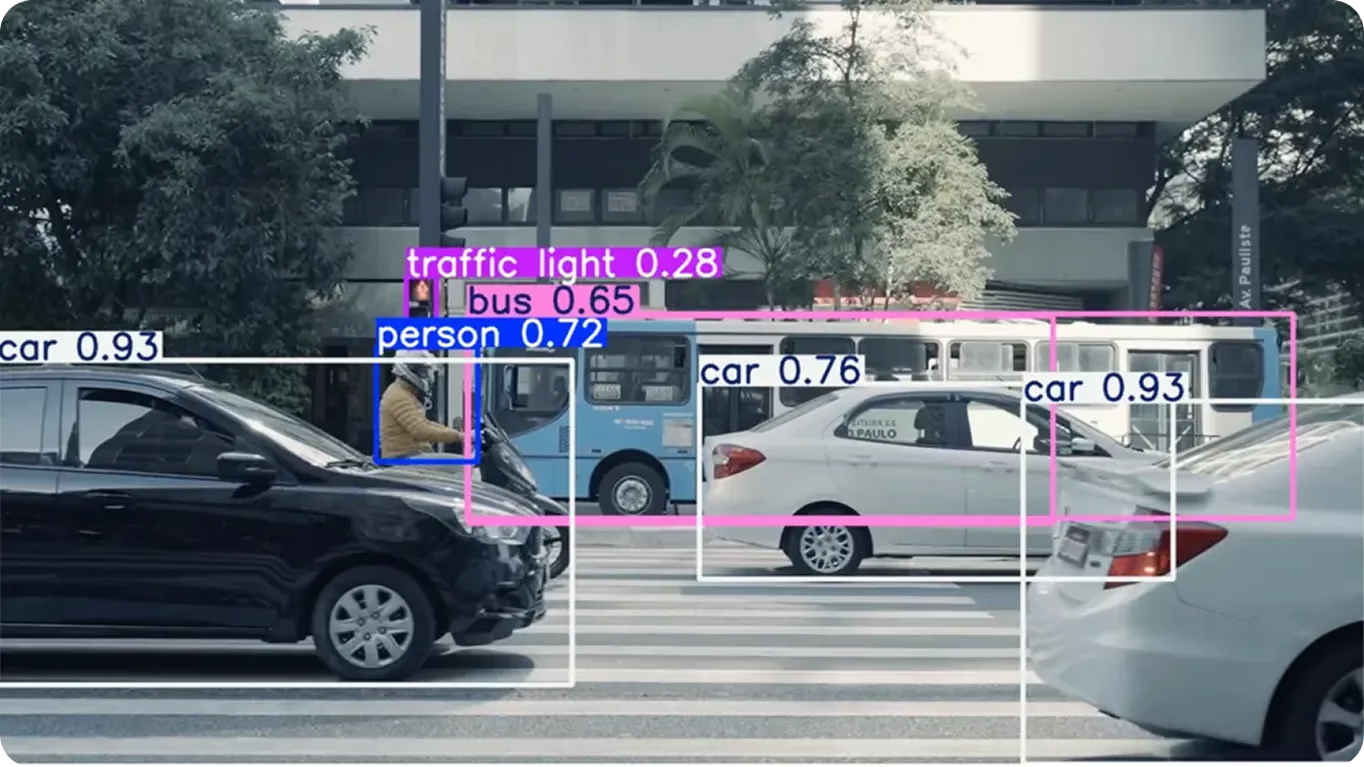
The key computer science technologies behind collision prediction systems are artificial intelligence and its subfields, such as computer vision and forecasting methods that help predict how things will move. For instance, computer vision models like Ultralytics YOLO11 and the upcoming Ultralytics YOLO26 can be used to detect and track objects such as vehicles and pedestrians in real time, and forecasting models use those insights to estimate their next movements.
Fig 1. An example of YOLO11 being used to detect objects on the road (Source).
The result is an AI system that understands what is happening around it and supports smarter decision-making in dynamic environments. In this article, we’ll explore how collision prediction works, the methods behind it, and the role computer vision and Ultralytics YOLO models can play in the process. Let’s get started!
Link to this sectionWhat is collision prediction?#
Collision prediction is the ability of an AI system to understand how objects are moving and anticipate when they may come very close or make contact. Different systems can use this information in many ways, including supporting safety features, movement optimization, or coordinating actions in shared spaces.
Wherever objects move through shared space, whether it is cars on a highway, forklifts in a warehouse aisle, or pedestrians crossing a street, collision prediction helps systems understand how these interactions may unfold. In safety-focused applications, this foresight can be used to reduce risk, while in other settings, it can support tasks such as route planning, timing, or coordinated movement.
For example, in many newer vehicles equipped with advanced driver assistance systems, or ADAS, cameras and sensors monitor the road ahead and estimate how quickly the car is approaching nearby objects. If the system detects that a situation could become unsafe, it alerts the driver, and in some cases, automatic braking may help reduce the impact.
Link to this sectionExploring the four stages of collision prediction#
Collision prediction involves a coordinated process in which different AI components work together to identify objects, follow their movement, and estimate what may happen next. These systems typically work through four connected stages: object detection, object tracking, trajectory forecasting, and finally collision prediction, with each stage building on the accuracy of the one before it.
Next, let’s take a closer look at how each stage works.
Link to this sectionA look at object detection#
Object detection is a core computer vision task in which vision AI models identify and locate objects in an image or video frame. By analyzing pixel data, an object detection model can produce three main outputs: bounding boxes, object classes, and confidence scores. Bounding boxes show where an object is, object classes indicate what it is, such as a car, pedestrian, or cyclist, and confidence scores reflect how certain the model is about the prediction.
Vision AI models like YOLO11 and YOLO26 build on this foundation and support several related tasks, including object detection, object tracking, and oriented bounding box (OBB) detection. Object detection can tell a prediction system what is in each frame, tracking follows those objects as they move, and oriented bounding boxes provide more accurate shapes for objects that appear at different angles.
At this stage, a collision prediction system is focused purely on understanding what is present in the visual data. It forms the base layer of information that all later steps depend on, but it doesn’t yet consider how objects will move or interact.
Link to this sectionAn overview of object tracking#
Once objects are detected, the next step is to track them across frames so the system can understand how they move over time. While detection provides new bounding boxes every frame, object tracking adds continuity by linking those detections over time.
Tracking algorithms supported by the Ultralytics Python package, such as ByteTrack or BoT-SORT, work with models like YOLO11 by using detection data from each frame to follow objects as they move. These algorithms assign a unique ID to each object and use it to maintain that identity even when the object moves quickly or becomes partially hidden. This creates a smooth tracking history that captures how the object moves.

Fig 2. A look at assigning unique IDs for different detections using YOLO (Source)
Here is a quick glimpse at how these two tracking methods work:
- ByteTrack: It uses both high and low confidence detections to maintain consistent object IDs, with motion predictions from a Kalman Filter helping the tracker stay stable when objects move quickly or are briefly hard to detect.
- BoT-SORT: This algorithm extends SORT by combining Kalman Filter motion predictions with appearance cues, allowing the tracker to follow objects more reliably in crowded scenes or during partial occlusion.
To measure how well these tracking methods perform, researchers evaluate them on established multi-object tracking (MOT) datasets and benchmarks. Also, metrics commonly used include multiple object tracking accuracy (MOTA), which reflects overall tracking quality; the identification F1 score (IDF1), which measures how consistently object identities are maintained; and the higher order tracking accuracy (HOTA), which offers a balanced view of both detection performance and association accuracy.
Link to this sectionUnderstanding trajectory forecasting#
After tracking an object across multiple frames, the next step is to predict where it will go next. This is known as trajectory forecasting. While detection finds objects and tracking follows how they move, forecasting looks ahead and estimates their future positions.
The information from detection and tracking, such as an object’s bounding box, position across frames, and assigned ID, can be used to calculate motion features like speed, direction, and movement patterns. These derived insights give the forecasting model the data it needs to estimate where the object is likely to be in the next few seconds.
In cases where tracking data contains gaps or abrupt jumps, interpolation techniques help reconstruct smoother, more consistent trajectories. This ensures the forecasting model receives high-quality motion input rather than noisy or incomplete position data.
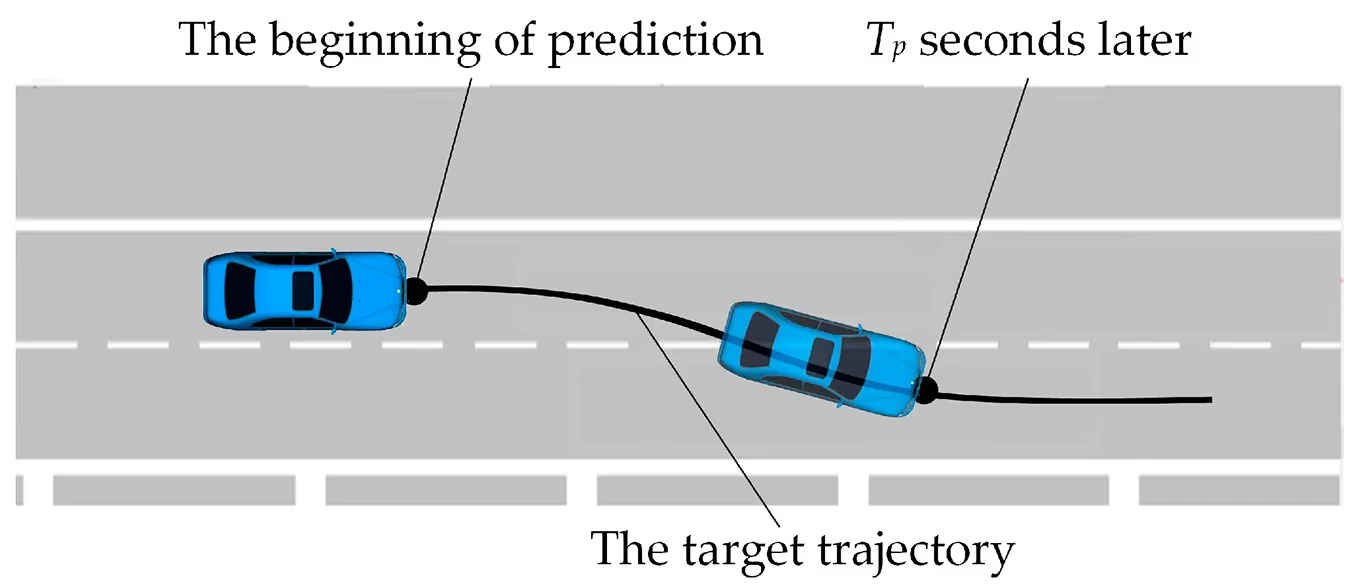
Fig 3. A visualization of predicting the trajectory of a car. (Source)
To make these predictions, many systems rely on deep learning models that are designed to understand how an object’s motion changes over time. By analyzing sequences of past positions and the motion features derived from them, these models learn common movement patterns and use that knowledge to forecast future paths.
Here are some commonly used deep learning and machine learning approaches for trajectory forecasting:
-
Recurrent Neural Networks (RNNs): RNNs are deep learning models designed to work with sequences, such as a series of video frames. They can keep a memory of previous positions and use that information to understand how an object has been moving. This helps the system recognize simple motion patterns like speeding up, slowing down, or moving in a straight line.
-
Long Short-Term Memory Networks (LSTMs): LSTMs are a more advanced type of RNN that can remember information for longer periods. This allows them to capture more complex movements, such as a vehicle preparing to turn or a pedestrian changing direction. Because they can track longer trends, they often produce more reliable predictions in busy environments.
-
Transformers: Transformers process full motion sequences and use attention to focus on the most important details of these sequences. This makes them especially effective in scenes where multiple objects interact, like merging cars or crossing pedestrians.
These models can predict both short-term and longer-term paths. Short-term forecasts, usually under two seconds, tend to be the most accurate, while predictions over longer windows, such as two to six seconds, provide more foresight but come with greater uncertainty.
Link to this sectionBring it all together: Collision detection algorithms#
In the final stage, collision prediction, the system uses everything it has learned so far: what each object is (detection), how it has moved (tracking), and where it is likely to go next (forecasting). This step checks whether any of the predicted paths might intersect in a way that could lead to a collision.
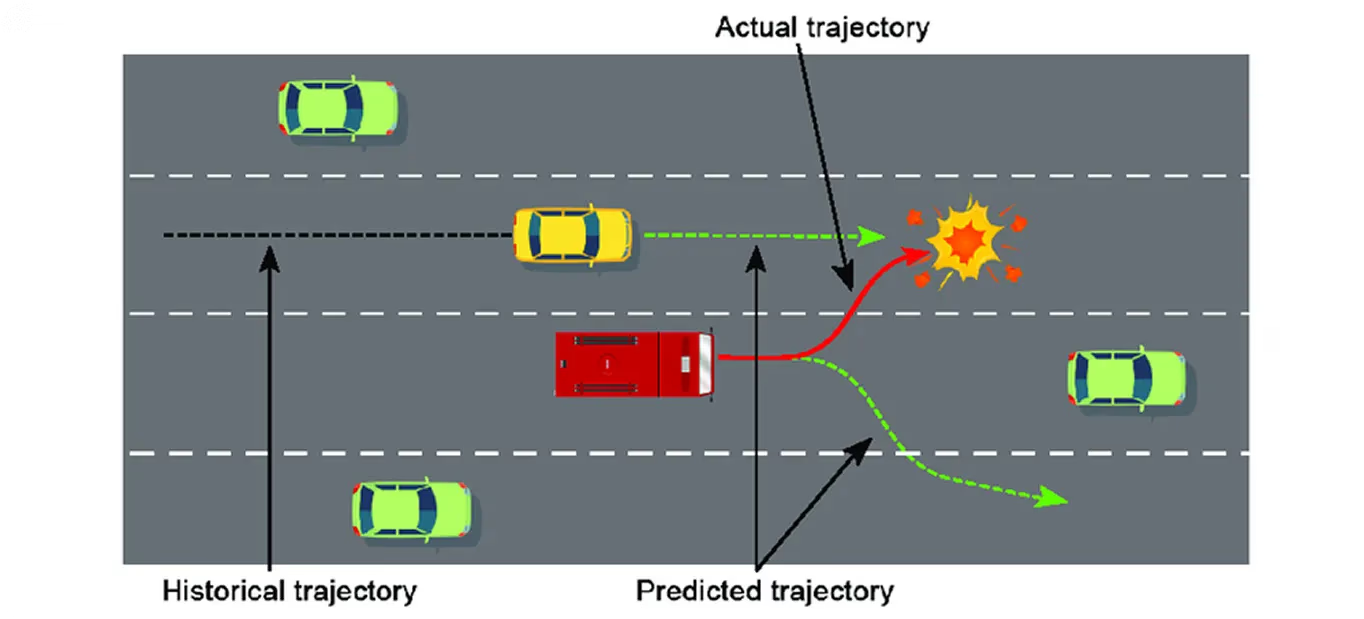
Fig 4. How a collision prediction system works (Source)
In the case of autonomous vehicles, a collision check system compares the future trajectories of nearby objects such as cars, pedestrians, and cyclists. If two predicted paths overlap or come dangerously close, it marks the situation as a potential vehicle collision. To understand how urgent the collision risk may be, the system also calculates a value known as time-to-collision.
Time-to-collision (TTC) is a key measurement in fast-moving environments. It estimates how much time remains before two objects would collide if they continue at their current speeds and directions. When TTC drops below a certain threshold, the system can respond by issuing warnings, applying the brakes, or adjusting its planned path.
Link to this sectionReal-world applications of collision prediction#
Collision prediction is becoming crucial across many industries, including traffic management, smart city infrastructure, industrial automation, and mobile robotics. As state-of-the-art computer vision and forecasting models continue to advance, these systems are becoming more capable of anticipating movement.
Now that we have a better understanding of how collision prediction and trajectory forecasting work, let’s look at some interesting research studies that showcase how these methods can be used in various real-world environments.
Link to this sectionYOLO-powered collision prediction for emergency autonomous vehicles#
Navigating crowded, unpredictable environments is one of the hardest challenges for autonomous systems, especially when pedestrians move in ways that don’t follow clear patterns. Emergency vehicles face this problem even more often, as they need to move quickly at high speeds through dense public spaces without relying on structured roads, lane markings, or predictable pedestrian behavior.
In these types of scenarios, understanding where people are and how they might move in the next few seconds becomes essential for avoiding accidents. For instance, a recent research study explored this challenge by building a complete collision prediction pipeline for an Emergency Autonomous Vehicle (EAV) operating in pedestrian-rich environments.
Link to this sectionHow the YOLO-powered collision prediction pipeline works#
Here's a glance at how this methodology works:
- Pedestrian detection using YOLO: A YOLO-based detector identifies pedestrians in each camera frame and outputs bounding boxes for each visible person.
- Motion tracking with ByteTrack: The ByteTrack algorithm links these detections across frames, giving each pedestrian a consistent ID and creating a motion history that shows how they are moving over time.
- Real-world position estimation: Inverse Perspective Mapping (IPM) converts 2D pixel coordinates into approximate ground-plane positions, helping the system understand where pedestrians are in real-world space relative to the vehicle.
- Bird’s-eye-view generation using a cGAN: A conditional GAN, an AI model that translates one image format into another, creates a bird’s-eye-view representation of the scene. This top-down layout makes it easier to interpret pedestrian positions and their surroundings.
- Trajectory prediction with an LSTM model: Using each pedestrian’s past positions and movement patterns, an LSTM model predicts where they are likely to move in the next few seconds.
- Efficient collision detection using collision cones: The predicted trajectories are compared using the collision-cone method, which determines whether the paths of the vehicle and any pedestrian are on course to intersect.
- Collision avoidance through signaling: If the system predicts a collision, it activates an auditory signal (such as a horn or bell) at the optimal moment. The timing is chosen to influence pedestrian behavior and give them a chance to speed up or slow down and get to safety.
Link to this sectionEnsuring pedestrian safety in cities using edge vision and YOLO#
Similarly, another approach to collision prevention looks beyond vehicles and focuses on the infrastructure itself. Instead of relying on sensors inside a car, this method uses smart cameras installed at crosswalks and intersections to monitor how pedestrians and vehicles move in real time. These locations are often unpredictable; people may step into the road suddenly, cyclists may weave through traffic, and drivers may not always slow down, so detecting risks early is vital.
An interesting study explored this idea through a system called NAVIBox, an edge-vision device designed to predict vehicle–pedestrian risks directly at the intersection. The system uses the Ultralytics YOLOv8 model to detect pedestrians and vehicles, and a lightweight Centroid tracker to follow them across frames. This creates short, reliable motion histories, which are then refined using a perspective transformation that converts the angled CCTV view into a clearer bird’s-eye layout of the road.
With these refined trajectories, NAVIBox can estimate how road users are likely to move in the next few seconds and check whether their paths may intersect (also referred to as an intersection test). When the system detects a risky interaction, it immediately sends warnings through displays for drivers and speakers for pedestrians - without relying on a remote server or network connection. Testing in real urban locations showed that NAVIBox runs fast enough for true real-time response and can accurately identify potential collision scenarios, making it a practical safety tool for busy city intersections.
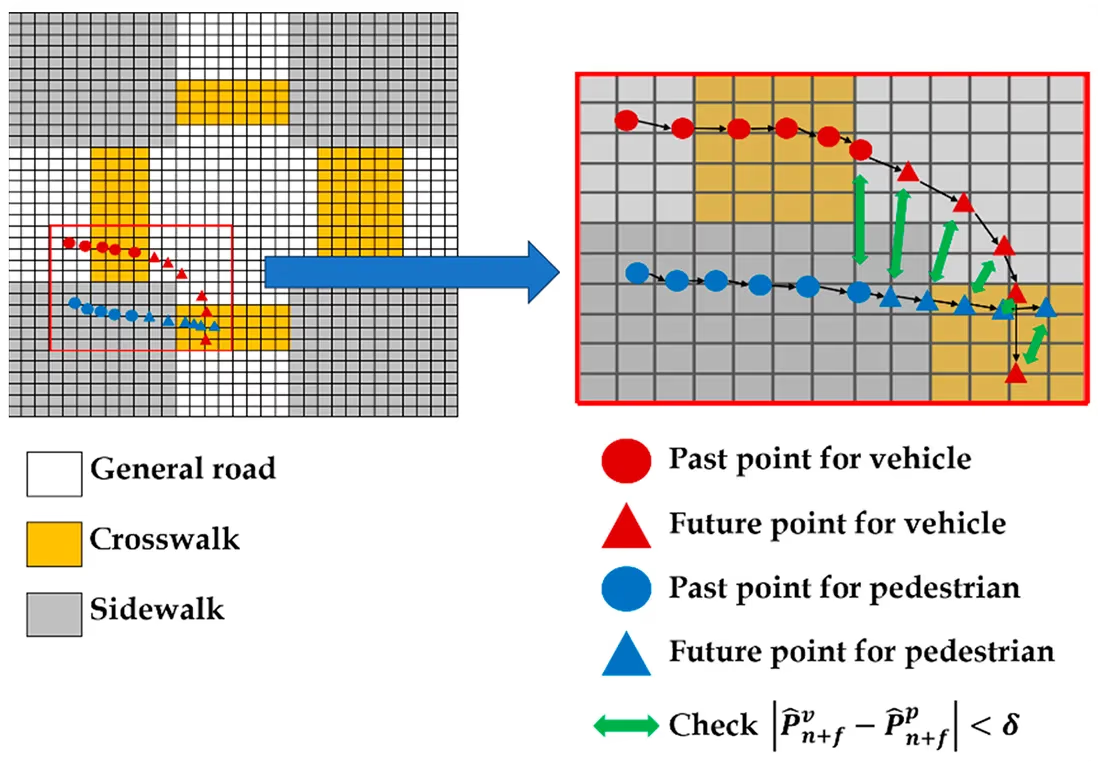
Fig 5. Predicting the risk of collision between vehicles and pedestrians. (Source)
Link to this sectionPros and cons of collision detection and prediction#
Here are some advantages of using AI-enabled predictive collision systems:
-
Improves situational awareness: AI systems continuously map how objects move in an environment, providing a richer understanding of large-scale crowd flow, traffic behavior, or machine paths.
-
Data-driven insights for long-term planning: By logging detections, near misses, and movement patterns, AI systems provide analytics that city planners, safety teams, and fleet operators can use to redesign intersections, improve signage, or refine operational policies.
-
Cost-effective risk prevention: By detecting risks before they escalate, these systems can make it possible to avoid costly accidents, insurance claims, or equipment repairs.
Despite its benefits, collision-free systems also face certain limitations. Here are a few challenges to consider:
- Sensor and camera placement constraints: Poorly positioned or angled cameras can distort object size or distance, making depth estimation and trajectory prediction less reliable.
- Occlusion: Objects may get partially or fully hidden behind others. This makes object tracking difficult since the model loses visual continuity.
- Environmental conditions: Low lighting, harsh sunlight, rain, fog, or poor camera quality can reduce the model's ability to see the scene clearly, affecting accuracy.
Link to this sectionKey takeaways#
Collision prediction brings together two powerful capabilities: computer vision, which lets systems understand what is happening in the environment right now, and trajectory forecasting, which helps them anticipate what is likely to happen next.
By combining these strengths, machines can detect moving objects in real time and predict how those objects may interact in the seconds ahead. As computer vision and forecasting techniques continue to evolve, collision prediction will likely become key for building safer, more reliable, and scalable autonomous systems.
Check out our community and GitHub repository to learn more about AI. Explore applications like AI in healthcare and computer vision in manufacturing on our solution pages. Discover our licensing options and start building today!






