Erkundung von Computer Vision in Navigationsanwendungen
Sieh dir an, wie Computer Vision in Navigationslösungen Echtzeit-Mapping, Objekterkennung und Augmented Reality für intelligentere und sicherere Reiseerlebnisse verbessert.

Heutzutage ist es mühelos, das Handy herauszuholen, ein Ziel einzugeben und Schritt-für-Schritt-Anweisungen zu befolgen, um anzukommen. Das dauert nur wenige Sekunden. Doch dieser alltägliche Komfort ist das Ergebnis jahrelangen technologischen Fortschritts. Die Navigation hat einen weiten Weg zurückgelegt – von Papierkarten und Kompassen hin zu intelligenten Systemen, die die Welt in Echtzeit verstehen und darauf reagieren können.
Eine der Technologien hinter diesem Wandel ist Computer Vision, ein Teilbereich der künstlichen Intelligenz (KI), der es Maschinen ermöglicht, visuelle Informationen wie ein Mensch zu interpretieren. Moderne Navigationswerkzeuge nutzen heute Echtzeit-Bilder von Satelliten, Dashcams und Sensoren auf Straßenebene, um die Genauigkeit von Karten zu verbessern, Straßenverhältnisse zu überwachen und Benutzer durch komplexe Umgebungen zu führen.
In diesem Artikel untersuchen wir, wie Computer Vision die Navigation verbessert, indem sie GPS-Karten optimiert, Echtzeit-Verkehrsinformationen liefert und Technologien wie Augmented-Reality-Navigation sowie autonome Fahrzeuge unterstützt.
Link to this sectionKI-Navigationssysteme mit immersiver 3D-Kartierung#
Die Nutzung von Werkzeugen wie Google Maps im Alltag ist zur Gewohnheit geworden, egal ob du durch die Stadt fährst oder nach einem Café in der Nähe suchst. Da KI-Technologien immer verbreiteter werden, sehen wir zunehmend fortschrittlichere Funktionen wie Immersive View, das 2023 von Google Maps eingeführt wurde und es Benutzern ermöglicht, Teile ihrer Reise in einer 3D-Umgebung vorab zu erkunden. Dies wird durch eine Kombination aus KI, Photogrammetrie und Computer Vision ermöglicht.
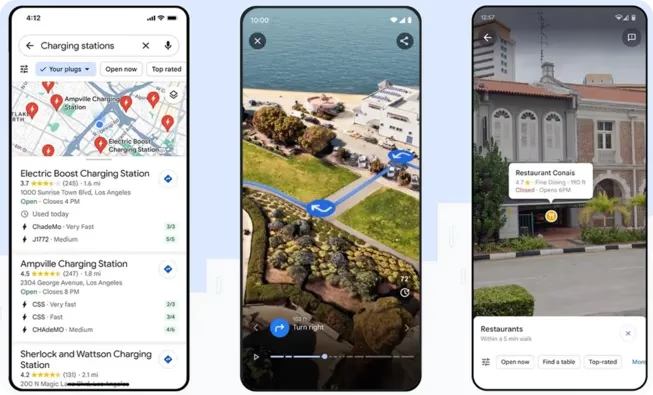
Abb. 1. Google Maps’ Immersive View.
Alles beginnt mit Milliarden hochauflösender Bilder, die von einer Reihe spezialisierter Geräte aufgenommen werden. Dazu gehören Street-View-Autos, Fahrzeuge mit 360-Grad-Kameras, die durch Städte fahren, sowie Trekker-Geräte – tragbare Rucksäcke mit montierten Kameras, die verwendet werden, um Bilder an Orten aufzunehmen, die Fahrzeuge nicht erreichen können, wie Wanderwege oder enge Gassen.
Diese Bilder werden mithilfe von Photogrammetrie mit Kartendaten abgeglichen. Dies ist eine Technik, die aus verschiedenen Blickwinkeln aufgenommene 2D-Fotos zu präzisen 3D-Modellen von Straßen, Gebäuden und Gelände zusammenfügt.
Anschließend wird Computer Vision eingesetzt, um diese Modelle mittels Objekterkennung und Image Segmentation zu analysieren und wichtige Merkmale wie Straßenschilder, Gehwege, Fußgängerüberwege und Gebäudeeingänge zu identifizieren und zu kennzeichnen.

Abb. 2. Immersive View nutzt Segmentierung, um Objekte auf einer Straße zu unterteilen.
Die gekennzeichneten Daten werden verwendet, um KI-Systeme zu trainieren, die erkennen, wie sich visuelle Hinweise je nach Region unterscheiden. Das System kann beispielsweise leicht zwischen einem „SLOW“-Schild in den USA, das typischerweise eine gelbe oder orangefarbene Raute ist, und einem ähnlichen Schild in Japan, das meist ein rotes und weißes Dreieck ist, unterscheiden. Dieses Verständnis macht die Navigation präziser und kulturell bewusster.
Schließlich legt Immersive View Live-Navigationspfade über die 3D-Umgebung und bietet so ein flüssiges, intuitives Erlebnis, das genau zeigt, wo du hinwillst.
Link to this sectionAugmented Reality in Navigationslösungen#
Wir alle haben wahrscheinlich schon einmal erlebt, dass wir im Kreis gelaufen sind und versucht haben herauszufinden, in welche Richtung uns Google Maps schickt. Genau dieses Problem möchte die Augmented Reality (AR)-Navigation lösen, eine Technologie, die digitale Informationen über die Kameransicht der realen Welt legt. Sie verändert die Art und Weise, wie Menschen sich an belebten Orten wie Stadtstraßen oder großen Innenbereichen zurechtfinden.
Reguläre Karten können schwer zu lesen sein, besonders wenn GPS-Signale schwach sind oder nicht gut funktionieren. AR-Navigation begegnet dem, indem sie digitale Wegweiser, Pfeile und Beschriftungen direkt auf dem Kamerabild der realen Welt anzeigt. Das bedeutet, dass Benutzer Anleitungen sehen, die genau zu den umliegenden Straßen und Gebäuden passen, was die Orientierung erheblich erleichtert.
Link to this sectionWie Augmented Reality in der Navigation eingesetzt wird#
Die AR-Navigation verlässt sich auf Computer Vision Modelle, um die Umgebung durch die Kamera eines Geräts zu verstehen. Dies umfasst verschiedene Aufgaben wie die Bildlokalisierung, die Merkmale wie Gebäudekanten oder Straßenschilder erkennt und mit einer gespeicherten Karte abgleicht. Simultaneous Localization and Mapping (SLAM) erstellt eine Karte der Umgebung, während die Position des Geräts in Echtzeit verfolgt wird.
Zum Beispiel war der Flughafen Zürich der erste, der Live View von Google Maps für die Indoor-Navigation implementierte. Passagiere können ihre Handykameras nutzen, um Pfeile und Richtungsanweisungen in der realen Umgebung zu sehen, die sie durch die Terminals zu den Gates, Geschäften und Services führen. Dies verbessert das Passagiererlebnis, indem die Navigation in komplexen Innenräumen einfacher wird.

Abb. 3. Der Flughafen Zürich nutzt Computer Vision und AR, um Passagiere in Innenräumen zu leiten.
Link to this sectionErhöhung der Verkehrssicherheit mit KI-Navigationssystemen#
Stadtstraßen werden täglich belebter. Mit mehr Autos auf der Straße, überfüllten Gehwegen und ständiger Aktivität ist es eine wachsende Herausforderung, den Verkehrsfluss sicher und reibungslos zu halten. Um dieses Chaos zu bewältigen, setzen viele Städte auf KI und Computer Vision.
Intelligente Kameras und Sensoren, die an Kreuzungen und entlang von Straßen installiert sind, erfassen einen stetigen Strom visueller Daten. Diese Aufnahmen werden in Echtzeit verarbeitet, um Unfälle zu erkennen, den Verkehrsfluss zu überwachen, Schlaglöcher zu identifizieren und Dinge wie illegales Parken oder riskantes Verhalten von Fußgängern zu erfassen.
Ein interessantes Beispiel hierfür ist die Smart Airport Expressway in Hangzhou, China. Diese 20 Kilometer lange Autobahn, die das Stadtzentrum von Hangzhou mit dem internationalen Flughafen Xiaoshan verbindet, wurde mit hochauflösenden Kameras und Millimeterwellen-Radaren ausgestattet. Diese Geräte sammeln kontinuierlich Video- und Sensordaten, die anschließend mittels Computer Vision analysiert werden.
Anstatt nur Filmmaterial aufzuzeichnen, interpretiert das System, was auf der Straße passiert. Computer-Vision-Algorithmen erkennen Fahrzeugkollisionen, identifizieren Verkehrsverstöße und erkennen sogar Fußgänger oder ungewöhnliche Bewegungen in der Nähe von Autobahnausfahrten. Dies ermöglicht es den Verkehrsbehörden, innerhalb von Sekunden auf Vorfälle zu reagieren, ohne physisch vor Ort sein zu müssen.
Die Daten fließen zudem in einen Digitalen Zwilling ein: ein virtuelles 3D-Live-Modell der Autobahn, das Echtzeit-Verkehrsbedingungen, Fahrzeugdetails und entstehende Staus anzeigt. Verkehrsbeamte überwachen diese visuelle Schnittstelle, um den Fluss zu steuern, intelligente Warnungen auszugeben und schnell sowie präzise auf Vorfälle zu reagieren.
Link to this sectionAutonome Mobilität durch Computer Vision in der Navigation#
Navigation bedeutet heute weit mehr als nur den Weg von A nach B zu finden. Sie ist mittlerweile ein kritischer Bestandteil intelligenter Systeme, die Menschen bewegen, Waren verwalten und Echtzeit-Entscheidungen treffen – sei es auf der Straße oder in Lagerhäusern.
Im Zentrum vieler dieser Systeme steht Computer Vision, die es Maschinen ermöglicht, visuelle Daten zu interpretieren und sofort auf ihre Umgebung zu reagieren. Gehen wir einige Beispiele durch, um zu sehen, wie diese Technologie die Navigation in verschiedenen Umgebungen verändert.
Link to this sectionLagerhausroboter navigieren mit Computer Vision#
Roboter werden für die Zukunft der Logistik immer wichtiger, insbesondere bei groß angelegten Lagerhausbetrieben. Mit wachsender E-Commerce-Nachfrage verlassen sich Unternehmen zunehmend auf Maschinen mit Computer-Vision-Unterstützung, um komplexe Umgebungen zu navigieren, Artikel zu sortieren und den Bestand mit hoher Geschwindigkeit und Präzision zu verwalten.
Nimm zum Beispiel die Fulfillment-Zentren von Amazon, in denen über 750.000 Roboter Seite an Seite mit Menschen arbeiten, um einen effizienten Betrieb zu gewährleisten. Diese Roboter verlassen sich in hohem Maße auf Computer Vision, um durch belebte Lagerböden zu navigieren, Artikel zu identifizieren und schnelle, präzise Entscheidungen zu treffen.
Ein solches System ist Sequoia, eine Roboterplattform, die darauf ausgelegt ist, die Bestandsverwaltung zu beschleunigen. Sie nutzt fortschrittliche Computer Vision, um eingehende Produkte zu scannen, zu zählen und zu organisieren, was dazu beiträgt, Lager- und Abrufprozesse zu rationalisieren.
Ähnlich nutzt der Roboterarm Vulcan Kameras und Bildanalyse, um Artikel sicher aus Regalen zu greifen. Er passt seinen Griff an die Form und Position jedes Objekts an und erkennt sogar, wenn menschliche Hilfe erforderlich ist. Währenddessen ist Cardinal, ein weiterer vision-gestützter Roboter, auf das Sortieren spezialisiert: Er scannt gemischte Stapel von Paketen und platziert sie präzise in die korrekten Ausgangsbehälter.

Abb. 4. Cardinal beim präzisen Anheben von Paketen aus einem Stapel.
Link to this sectionComputer Vision in der Navigation autonomer Fahrzeuge#
Bisher haben wir gesehen, wie Computer Vision sowohl Menschen als auch Robotern hilft, ihre Umgebung zu navigieren. Aber sie ist genauso entscheidend für autonome Systeme wie selbstfahrende Autos, bei denen die Navigation vollständig davon abhängt, was das Fahrzeug in Echtzeit sehen und verstehen kann.
Ein gutes Beispiel ist das Tesla Vision System. Tesla setzt auf einen reinen Kameraansatz für autonomes Fahren und verzichtet zugunsten eines Netzwerks von Kameras, die eine vollständige 360-Grad-Ansicht der Fahrzeugumgebung bieten, auf Radar und andere Sensoren. Diese Kameras speisen visuelle Daten in den Full Self-Driving (FSD)-Computer ein, der tiefe neuronale Netzwerke nutzt, um die Umgebung zu interpretieren und blitzschnelle Fahrentscheidungen zu treffen.
Basierend auf dem Gesehenen entscheidet das System, wann gelenkt, beschleunigt, gebremst oder die Spur gewechselt werden soll – genau wie ein menschlicher Fahrer, jedoch ausschließlich durch visuelle Eingaben. Tesla verbessert dieses System kontinuierlich durch das Sammeln und Lernen aus riesigen Mengen realer Fahrdaten seiner gesamten Flotte.

Abb. 5. Tesla nutzt Computer Vision für sichere und autonome Navigation (Quelle: Tesla).
Link to this sectionVor- und Nachteile von Computer Vision in der Navigation#
Hier sind einige wesentliche Vorteile des Einsatzes von Computer Vision in der Navigation, insbesondere in Systemen, in denen Genauigkeit, Sicherheit und Entscheidungsfindung in Echtzeit unerlässlich sind:
- Reduziert den Kraftstoffverbrauch: Indem Computer Vision Fahrern hilft, Staus und Stop-and-Go-Strecken zu vermeiden, kann sie den gesamten Kraftstoffverbrauch und die Reisezeit senken und tägliche Pendelfahrten effizienter machen.
- Erkennt Straßenverschleiß und Infrastrukturprobleme: Vision-basierte Lösungen können nach Schlaglöchern, verblassten Fahrbahnmarkierungen, beschädigten Schildern und defekter Infrastruktur suchen und Wartungsteams zuverlässige Daten in Echtzeit liefern.
- Lässt sich nahtlos in andere KI-Tools integrieren: Computer Vision kann mit Sprachassistenten, Verhaltensvorhersagemodellen oder Routenoptimierungsalgorithmen kombiniert werden, um ein hochintelligentes und personalisiertes Navigationserlebnis zu schaffen.
Obwohl Computer Vision viele Vorteile für die Navigation mit sich bringt, gibt es auch einige wichtige Einschränkungen bei der Implementierung solcher Lösungen. Hier sind einige Herausforderungen, die man im Hinterkopf behalten sollte:
- Mangelnde Generalisierung: Modelle, die auf bestimmte Umgebungen oder Szenarien trainiert wurden, haben oft Schwierigkeiten, wenn sie ohne nachträgliches Training in neuen oder sich ändernden Kontexten eingesetzt werden.
- Beleuchtungseinschränkungen: Vision-Systeme sind auf gute Lichtverhältnisse und klares Wetter angewiesen, um gut zu funktionieren. Bei Nebel, starkem Regen oder Dunkelheit nimmt ihre Leistung ab, sofern sie nicht mit Sensoren wie LiDAR oder Radar kombiniert werden.
- Datenschutzrisiken: Navigationssysteme, die Kameras verwenden, können Personen und Privateigentum ohne Zustimmung erfassen. Dies wirft Datenschutzfragen auf, die bei Entwicklung und Einsatz sorgfältig behandelt werden müssen.
Link to this sectionWichtige Erkenntnisse#
Computer Vision erfindet die Navigation neu, indem sie Karten dynamischer, Verkehrssysteme intelligenter und Mobilität zugänglicher macht. Was einst statische Routen waren, sind heute interaktive Echtzeiterlebnisse – angetrieben durch immersive 3D-Vorschauen, AR-geführte Anweisungen und Technologien für autonomen Transport.
Mit dem technologischen Fortschritt wird sich der Fokus wahrscheinlich darauf verlagern, diese Systeme inklusiver, anpassungsfähiger und verantwortungsbewusster zu gestalten. Kontinuierlicher Fortschritt hängt von der Verbesserung der Genauigkeit in verschiedenen Umgebungen, der Aufrechterhaltung zuverlässiger Leistung und dem Schutz der Privatsphäre der Benutzer ab. Die Zukunft von Computer Vision in der Navigation liegt darin, Lösungen zu entwickeln, die nicht nur intelligent sind, sondern auch in ihrem Design und ihrer Auswirkung rücksichtsvoll.
Werde Teil unserer wachsenden Community! Erkunde unser GitHub-Repository, um mehr über KI zu erfahren, und sieh dir unsere Lizenzoptionen an, um deine Vision-KI-Projekte zu starten. Interessiert an Innovationen wie KI im Einzelhandel und Computer Vision in der Landwirtschaft? Besuche unsere Lösungsseiten, um mehr zu entdecken!






