Was ist R-CNN? Ein kurzer Überblick
Erfahre mehr über RCNN und dessen Auswirkungen auf die Objekterkennung. Wir behandeln die Kernkomponenten, Anwendungen und die Rolle bei der Weiterentwicklung von Techniken wie Fast RCNN und YOLO.
Objekterkennung ist eine Aufgabe der Computer Vision, die Objekte in Bildern oder Videos erkennen und lokalisieren kann, was für Anwendungen wie autonomes Fahren, Überwachung und medizinische Bildgebung wichtig ist. Frühere Methoden der Objekterkennung, wie der Viola-Jones-Detektor und Histogram of Oriented Gradients (HOG) mit Support Vector Machines (SVM), verließen sich auf manuell erstellte Merkmale und Sliding-Window-Ansätze. Diese Methoden hatten oft Schwierigkeiten, Objekte in komplexen Szenen mit mehreren Objekten unterschiedlicher Form und Größe präzise zu erkennen.
Region-based Convolutional Neural Networks (R-CNN) haben die Art und Weise, wie wir die Objekterkennung angehen, verändert. Es ist ein wichtiger Meilenstein in der Geschichte der Computer Vision. Um zu verstehen, wie Modelle wie YOLOv8 entstanden sind, müssen wir zunächst Modelle wie R-CNN verstehen.
Die von Ross Girshick und seinem Team entwickelte R-CNN-Modellarchitektur generiert Regionenvorschläge, extrahiert Merkmale mit einem vortrainierten Convolutional Neural Network (CNN), klassifiziert Objekte und verfeinert Bounding Boxes. Auch wenn das abschreckend klingen mag, wirst du am Ende dieses Artikels ein klares Verständnis davon haben, wie R-CNN funktioniert und warum es so einflussreich ist. Werfen wir einen Blick darauf!
Link to this sectionWie funktioniert R-CNN?#
Der Objekterkennungsprozess des R-CNN-Modells umfasst drei Hauptschritte: Generierung von Regionenvorschlägen, Extraktion von Merkmalen sowie Klassifizierung der Objekte bei gleichzeitiger Verfeinerung der Bounding Boxes. Gehen wir die einzelnen Schritte durch.
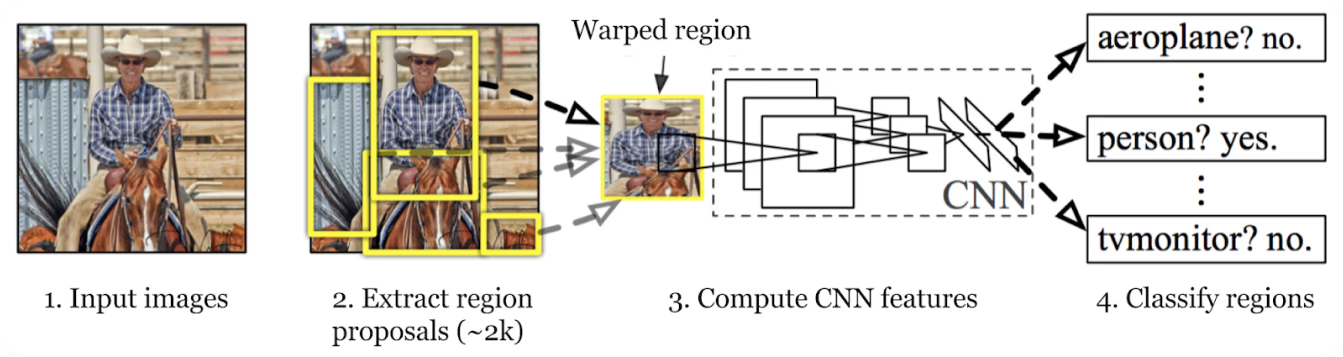
Abb. 1. Funktionsweise von R-CNN.
Link to this sectionRegionenvorschläge: Das Rückgrat von R-CNN#
Im ersten Schritt scannt das R-CNN-Modell das Bild, um zahlreiche Regionenvorschläge zu erstellen. Regionenvorschläge sind potenzielle Bereiche, in denen sich Objekte befinden könnten. Methoden wie Selective Search werden verwendet, um verschiedene Aspekte des Bildes zu betrachten, wie Farbe, Textur und Form, und es in verschiedene Teile zu zerlegen. Selective Search beginnt damit, das Bild in kleinere Teile zu unterteilen und dann ähnliche Teile zu größeren Bereichen von Interesse zusammenzuführen. Dieser Prozess wird fortgesetzt, bis etwa 2.000 Regionenvorschläge generiert wurden.
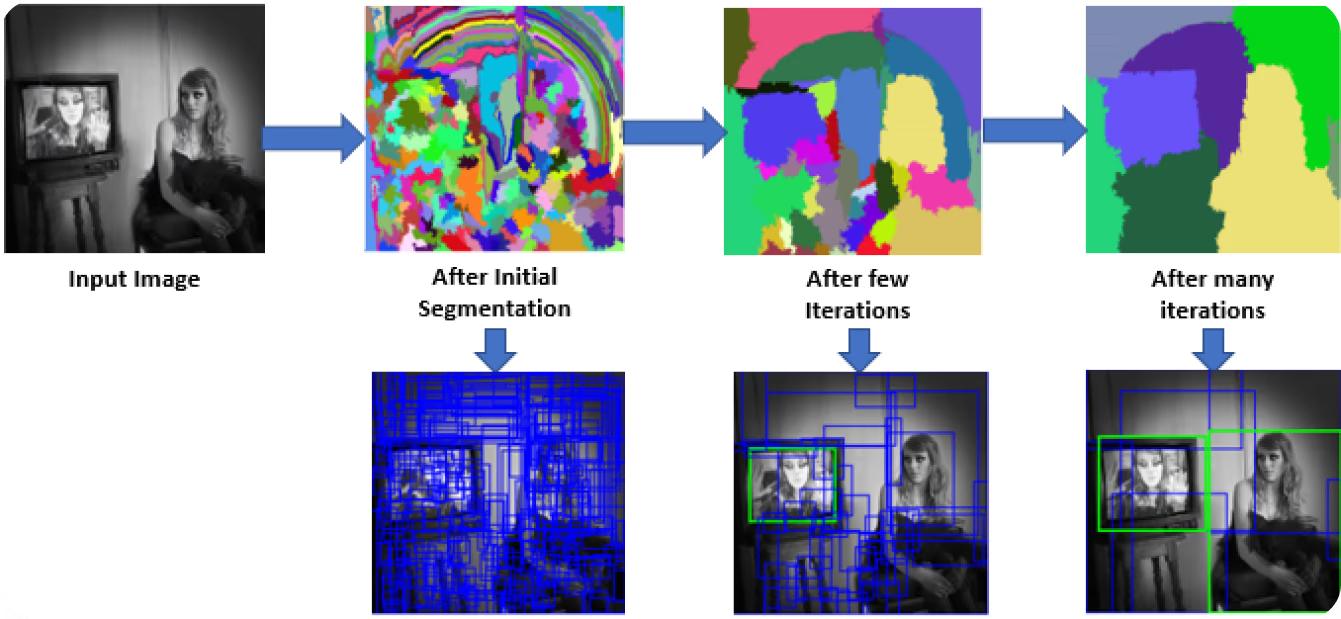
Abb. 2. Funktionsweise von Selective Search.
Diese Regionenvorschläge helfen dabei, alle möglichen Stellen zu identifizieren, an denen ein Objekt vorhanden sein könnte. In den folgenden Schritten kann das Modell die relevantesten Bereiche effizient verarbeiten, indem es sich auf diese spezifischen Bereiche konzentriert, anstatt auf das gesamte Bild. Die Verwendung von Regionenvorschlägen gleicht Gründlichkeit mit Recheneffizienz aus.
Link to this sectionBildmerkmal-Extraktion: Die Details erfassen#
Der nächste Schritt im Objekterkennungsprozess des R-CNN-Modells besteht darin, Merkmale aus den Regionenvorschlägen zu extrahieren. Jeder Regionenvorschlag wird auf eine einheitliche Größe skaliert, die das CNN erwartet (zum Beispiel 224x224 Pixel). Die Größenänderung hilft dem CNN, jeden Vorschlag effizient zu verarbeiten. Vor dem Warping wird die Größe jedes Regionenvorschlags leicht erweitert, um 16 Pixel zusätzlichen Kontext um die Region herum einzubeziehen, was mehr Umgebungsinformationen für eine bessere Merkmalsextraktion liefert.
Nach der Skalierung werden diese Regionenvorschläge in ein CNN wie AlexNet eingespeist, das üblicherweise auf einem großen Datensatz wie ImageNet vortrainiert wurde. Das CNN verarbeitet jede Region, um hochdimensionale Merkmalsvektoren zu extrahieren, die wichtige Details wie Kanten, Texturen und Muster erfassen. Diese Merkmalsvektoren kondensieren die wesentlichen Informationen aus den Regionen. Sie transformieren die Rohbilddaten in ein Format, das das Modell für die weitere Analyse verwenden kann. Die präzise Klassifizierung und Lokalisierung von Objekten in den nächsten Phasen hängt von dieser entscheidenden Umwandlung visueller Informationen in aussagekräftige Daten ab.
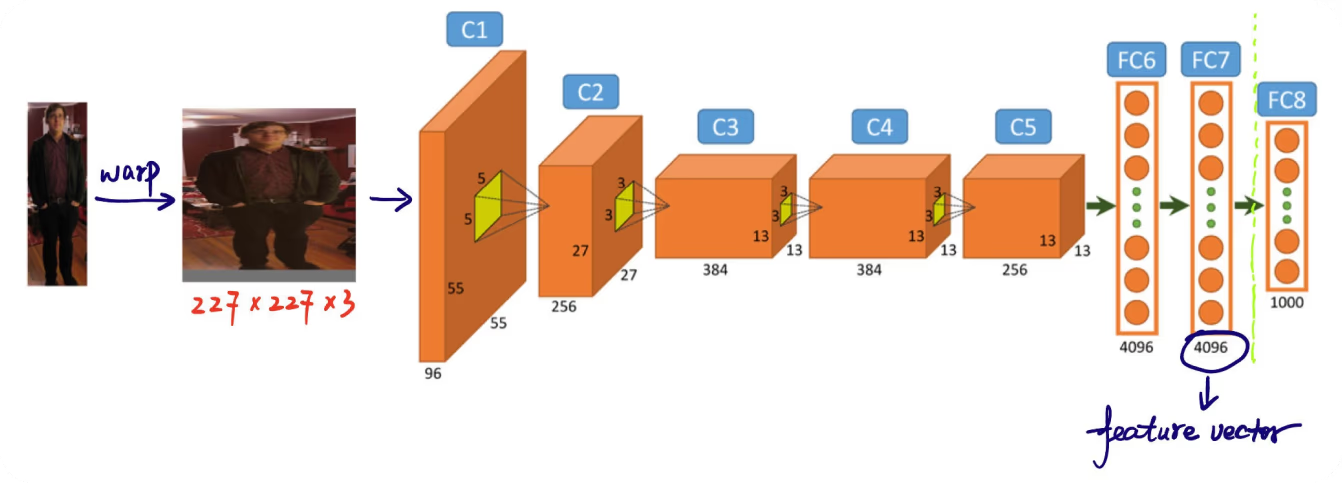
Abb. 3. Extraktion von Merkmalen aus einem Regionenvorschlag mit AlexNet.
Link to this sectionObjektklassifizierung: Identifizierung erkannter Objekte#
Der dritte Schritt besteht darin, die Objekte innerhalb dieser Regionen zu klassifizieren. Dies bedeutet, die Kategorie oder Klasse jedes innerhalb der Vorschläge gefundenen Objekts zu bestimmen. Die extrahierten Merkmalsvektoren werden dann durch einen Machine-Learning-Klassifikator geleitet.
Im Fall von R-CNN werden häufig Support Vector Machines (SVMs) für diesen Zweck verwendet. Jede SVM ist darauf trainiert, eine spezifische Objektklasse zu erkennen, indem sie die Merkmalsvektoren analysiert und entscheidet, ob eine bestimmte Region eine Instanz dieser Klasse enthält. Im Grunde gibt es für jede Objektkategorie einen dedizierten Klassifikator, der jeden Regionenvorschlag auf dieses spezifische Objekt hin überprüft.
Während des Trainings erhalten die Klassifikatoren gelabelte Daten mit positiven und negativen Beispielen:
- Positive Beispiele: Regionen, die das Zielobjekt enthalten.
- Negative Beispiele: Regionen ohne das Objekt.
Die Klassifikatoren lernen, zwischen diesen Beispielen zu unterscheiden. Die Bounding-Box-Regression verfeinert zusätzlich die Position und Größe erkannter Objekte, indem sie die anfänglich vorgeschlagenen Bounding Boxes anpasst, um besser mit den tatsächlichen Objektgrenzen übereinzustimmen. Das R-CNN-Modell kann Objekte identifizieren und präzise lokalisieren, indem es Klassifizierung und Bounding-Box-Regression kombiniert.
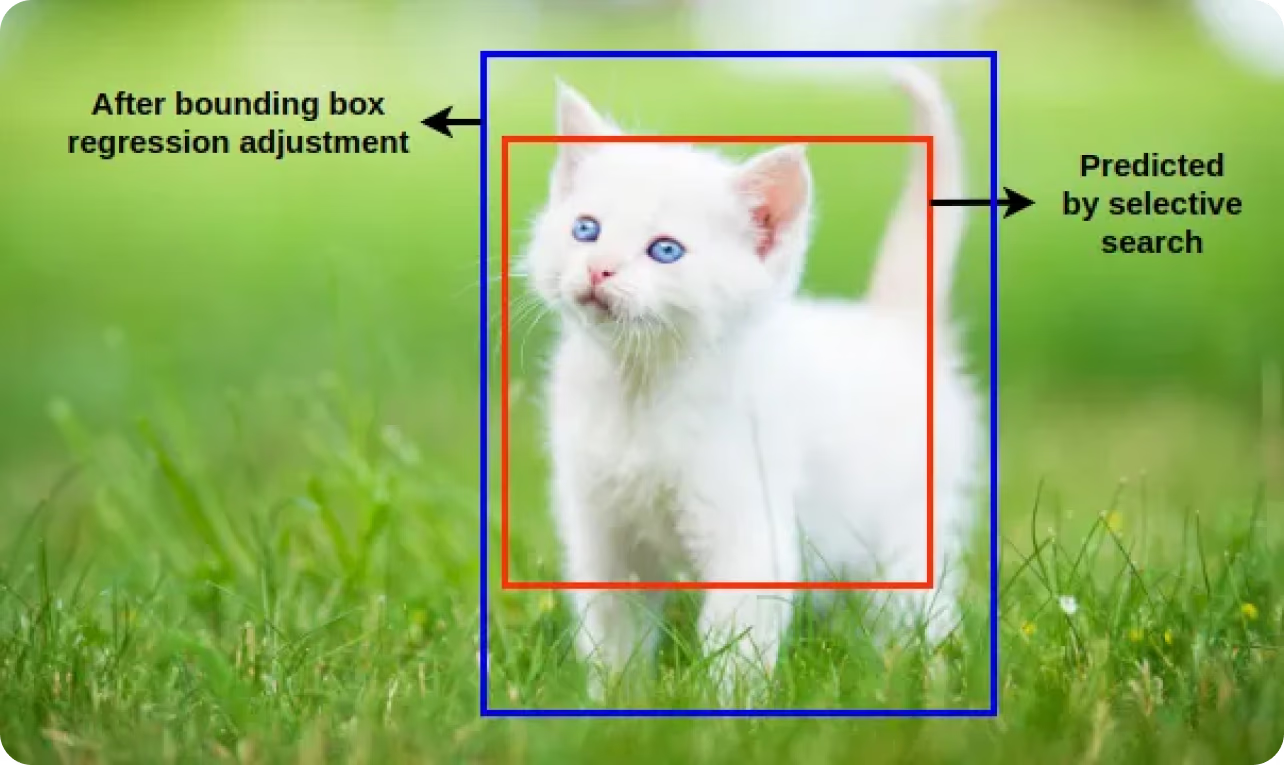
Abb. 4. Ein Beispiel für Bounding-Box-Regression. (Quelle: towardsdatascience.com)
Link to this sectionAlles zusammenfügen: Verfeinerung der Erkennungen mit NMS#
Nach den Schritten der Klassifizierung und Bounding-Box-Regression generiert das Modell oft mehrere sich überschneidende Bounding Boxes für dasselbe Objekt. Non-Maximum Suppression (NMS) wird angewendet, um diese Erkennungen zu verfeinern und die genauesten Boxen beizubehalten. Das Modell eliminiert redundante und sich überschneidende Boxen durch Anwendung von NMS und behält nur die Erkennungen mit der höchsten Konfidenz bei.
NMS funktioniert, indem es die Konfidenzwerte (die angeben, wie wahrscheinlich es ist, dass ein erkanntes Objekt tatsächlich vorhanden ist) aller Bounding Boxes bewertet und diejenigen unterdrückt, die sich signifikant mit Boxen mit höheren Werten überschneiden.
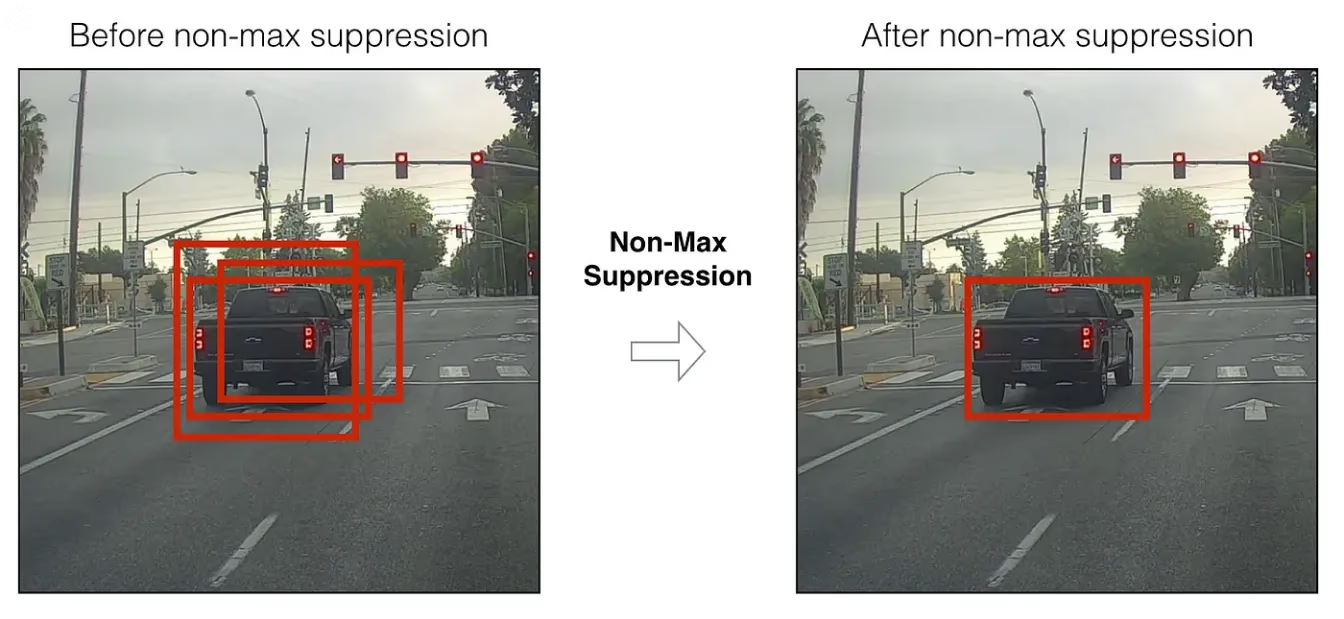
Abb. 5. Ein Beispiel für Non-Maximum Suppression. (Quelle: towardsdatascience.com)
Hier ist eine Aufschlüsselung der Schritte bei NMS:
- Sortierung: Die Bounding Boxes werden nach ihren Konfidenzwerten in absteigender Reihenfolge sortiert.
- Auswahl: Die Box mit dem höchsten Wert wird ausgewählt, und alle Boxen, die sich signifikant (basierend auf Intersection over Union, IoU) mit ihr überschneiden, werden entfernt.
- Iteration: Dieser Prozess wird für die Box mit dem nächsthöheren Wert wiederholt und fortgesetzt, bis alle Boxen verarbeitet wurden.
Zusammenfassend erkennt das R-CNN-Modell Objekte, indem es Regionenvorschläge generiert, Merkmale mit einem CNN extrahiert, Objekte klassifiziert und ihre Positionen mit Bounding-Box-Regression verfeinert und Non-Maximum Suppression (NMS) verwendet, um nur die genauesten Erkennungen beizubehalten.
Link to this sectionR-CNN ist ein Meilenstein der Objekterkennung#
R-CNN ist ein richtungsweisendes Modell in der Geschichte der Objekterkennung, da es einen neuen Ansatz einführte, der die Genauigkeit und Leistung erheblich verbesserte. Vor R-CNN hatten Objekterkennungsmodelle Schwierigkeiten, Geschwindigkeit und Präzision in Einklang zu bringen. Die Methode von R-CNN, Regionenvorschläge zu generieren und CNNs zur Merkmalsextraktion zu verwenden, ermöglicht eine präzise Lokalisierung und Identifizierung von Objekten in Bildern.
R-CNN ebnete den Weg für Modelle wie Fast R-CNN, Faster R-CNN und Mask R-CNN, die die Effizienz und Genauigkeit weiter steigerten. Durch die Kombination von Deep Learning mit regionenbasierter Analyse setzte R-CNN einen neuen Standard in diesem Bereich und eröffnete Möglichkeiten für verschiedene reale Anwendungen.
Link to this sectionTransformation der medizinischen Bildgebung mit R-CNN#
Ein interessanter Anwendungsfall für R-CNN ist die medizinische Bildgebung. R-CNN-Modelle wurden verwendet, um verschiedene Arten von Tumoren, wie Gehirntumoren, in medizinischen Scans wie MRIs und CT-Scans zu erkennen und zu klassifizieren. Die Verwendung des R-CNN-Modells in der medizinischen Bildgebung verbessert die diagnostische Genauigkeit und hilft Radiologen, Malignitäten in einem frühen Stadium zu identifizieren. Die Fähigkeit von R-CNN, selbst kleine und frühe Tumoren zu erkennen, kann einen signifikanten Unterschied bei der Behandlung und Prognose von Krankheiten wie Krebs bewirken.
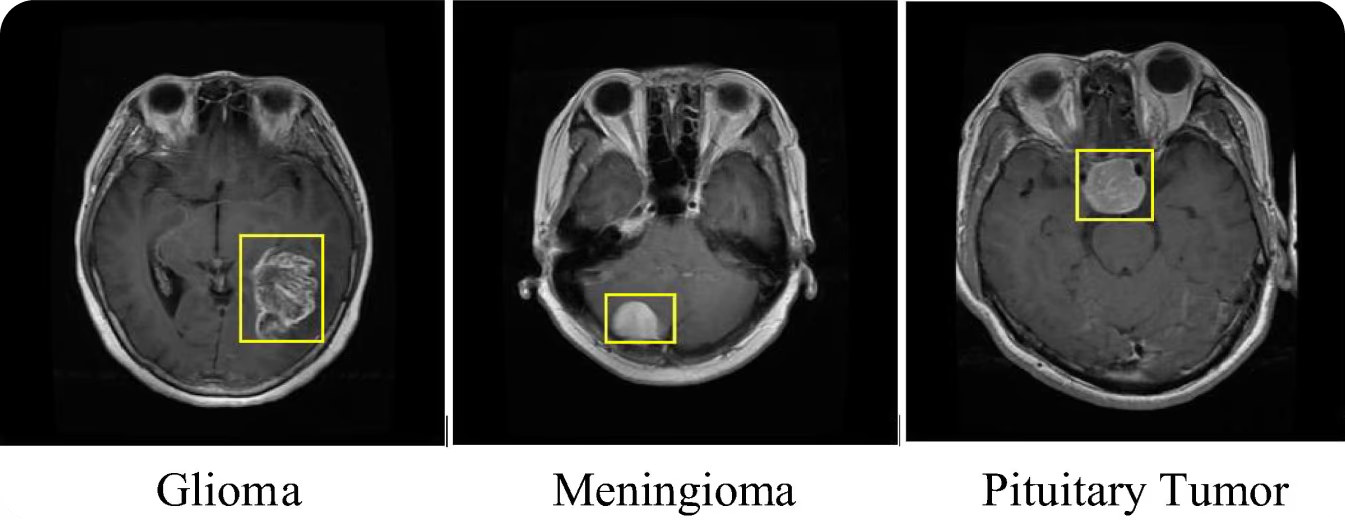
Abb. 6. Erkennung von Gehirntumoren mit R-CNN.
Das R-CNN-Modell kann zusätzlich zur Tumorerkennung auf andere Aufgaben der medizinischen Bildgebung angewendet werden. Zum Beispiel kann es Frakturen identifizieren, Netzhauterkrankungen in Augen-Scans erkennen und Lungenbilder auf Erkrankungen wie Lungenentzündung und COVID-19 analysieren. Unabhängig vom medizinischen Problem kann eine frühzeitige Erkennung zu besseren Patientenergebnissen führen. Durch die Anwendung der Präzision von R-CNN bei der Identifizierung und Lokalisierung von Anomalien können Gesundheitsdienstleister die Zuverlässigkeit und Geschwindigkeit medizinischer Diagnosen verbessern. Da die Objekterkennung den Diagnoseprozess rationalisiert, können Patienten von zeitnahen und genauen Behandlungsplänen profitieren.
Link to this sectionDie Einschränkungen von R-CNN und seine Nachfolger#
Obwohl beeindruckend, hat R-CNN gewisse Nachteile, wie eine hohe rechnerische Komplexität und langsame Inferenzzeiten. Diese Nachteile machen das R-CNN-Modell für Echtzeitanwendungen ungeeignet. Die Trennung von Regionenvorschlägen und Klassifizierungen in verschiedene Schritte kann zu einer weniger effizienten Leistung führen.
Im Laufe der Jahre sind verschiedene Objekterkennungsmodelle erschienen, die diese Bedenken adressiert haben. Fast R-CNN kombiniert Regionenvorschläge und CNN-Merkmalsextraktion in einem einzigen Schritt, was den Prozess beschleunigt. Faster R-CNN führt ein Region Proposal Network (RPN) ein, um die Generierung von Vorschlägen zu rationalisieren, während Mask R-CNN eine Segmentierung auf Pixelebene für detailliertere Erkennungen hinzufügt.
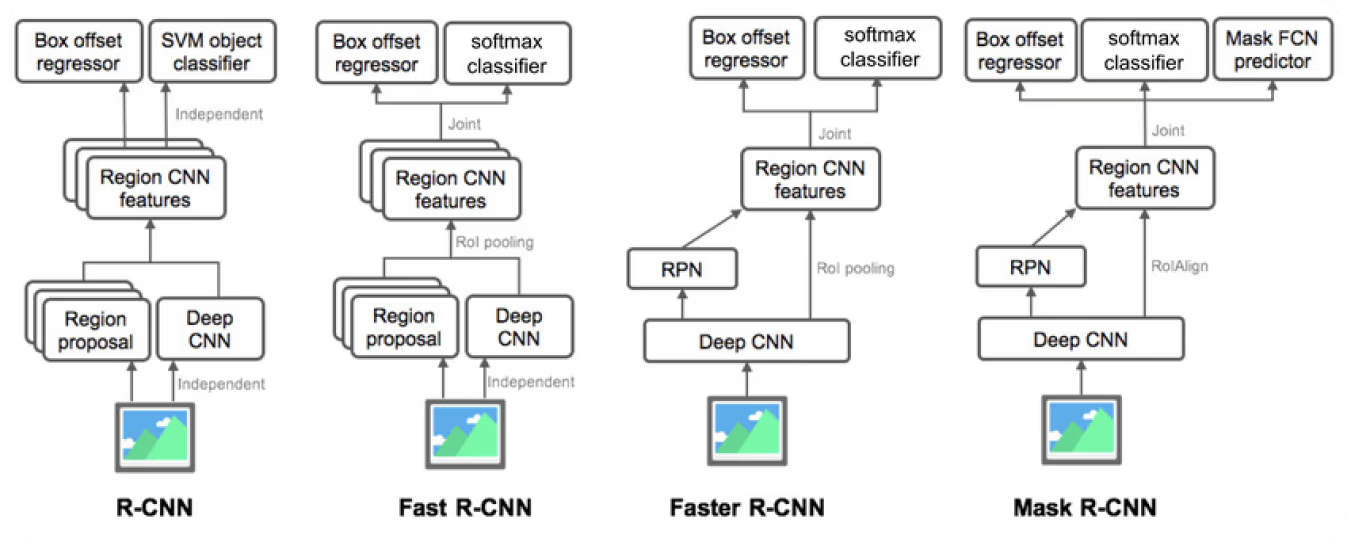
Abb. 7. Vergleich von R-CNN, Fast R-CNN, Faster R-CNN und Mask R-CNN.
Etwa zur gleichen Zeit wie Faster R-CNN begann die YOLO (You Only Look Once) Serie, die Echtzeit-Objekterkennung voranzutreiben. YOLO-Modelle sagen Bounding Boxes und Klassenwahrscheinlichkeiten in einem einzigen Durchgang durch das Netzwerk vorher. Zum Beispiel bietet das Ultralytics YOLOv8 verbesserte Genauigkeit und Geschwindigkeit mit fortschrittlichen Funktionen für viele Computer-Vision-Aufgaben.
Link to this sectionWichtige Erkenntnisse#
R-CNN hat das Spiel in der Computer Vision verändert und gezeigt, wie Deep Learning die Objekterkennung verändern kann. Sein Erfolg inspirierte viele neue Ideen auf diesem Gebiet. Auch wenn neuere Modelle wie Faster R-CNN und YOLO entwickelt wurden, um die Mängel von R-CNN zu beheben, ist sein Beitrag ein riesiger Meilenstein, den man sich merken sollte.
Während die Forschung weitergeht, werden wir noch bessere und schnellere Objekterkennungsmodelle sehen. Diese Fortschritte werden nicht nur verbessern, wie Maschinen die Welt verstehen, sondern auch zu Fortschritten in vielen Branchen führen. Die Zukunft der Objekterkennung sieht spannend aus!
Möchtest du mehr über KI erfahren? Werde Teil der Ultralytics Community! Entdecke unser GitHub Repository, um unsere neuesten Innovationen in der künstlichen Intelligenz zu sehen. Schau dir unsere KI-Lösungen an, die verschiedene Sektoren wie Landwirtschaft und Fertigung abdecken. Schließ dich uns an, um zu lernen und Fortschritte zu erzielen!






