Ultralytics YOLO 모델을 활용한 차량 재식별 성능 향상
Ultralytics YOLO 모델이 정밀하고 정확한 탐지를 제공하여 차량 재식별 솔루션에서 어떤 역할을 할 수 있는지 알아보세요.

Formula One 경기를 시청할 때, 좋아하는 팀의 차량을 식별하는 것은 쉽습니다. Ferrari의 밝은 빨간색이나 Mercedes의 은색은 랩을 거듭해도 눈에 띕니다.
깨끗한 경주 트랙이 아닌 교통량으로 혼잡한 도시 거리에서 기계에게 똑같은 작업을 수행하도록 요구하는 것은 훨씬 더 어렵습니다. 이것이 최근 AI 분야에서 차량 재식별(vehicle re-ID)이 주목받는 이유입니다.
차량 재식별은 기계가 다중 시점 또는 겹치지 않는 카메라 간에 동일한 차량을 인식할 수 있는 능력을 제공합니다. 또한 일시적인 가림 현상(차량이 부분적으로 가려질 때)이나 조명 및 시점 변화 후에도 차량을 식별하는 것을 목표로 합니다.
차량 재식별을 구동하는 핵심 기술은 computer vision입니다. 컴퓨터 비전은 기계가 이미지 및 비디오와 같은 시각적 정보를 이해하고 해석하도록 교육하는 데 중점을 둔 인공지능의 하위 분야입니다. 이 기술을 사용하여 AI 시스템은 차량 특징을 분석하고 도시 감시 및 교통 모니터링과 같은 애플리케이션을 위해 대규모 카메라 네트워크 전반에서 안정적으로 추적할 수 있습니다.
특히 Ultralytics YOLO11 및 곧 출시될 Ultralytics YOLO26과 같은 Vision AI 모델은 객체 탐지 및 추적과 같은 작업을 지원합니다. 이 모델들은 각 프레임에서 차량을 신속하게 찾아내고 장면을 통과하는 움직임을 따라갈 수 있습니다. 이러한 모델이 차량 재식별 네트워크와 결합되면, 결합된 시스템은 뷰나 조명 조건이 변경되더라도 서로 다른 카메라 피드 전반에서 동일한 차량을 인식할 수 있습니다.
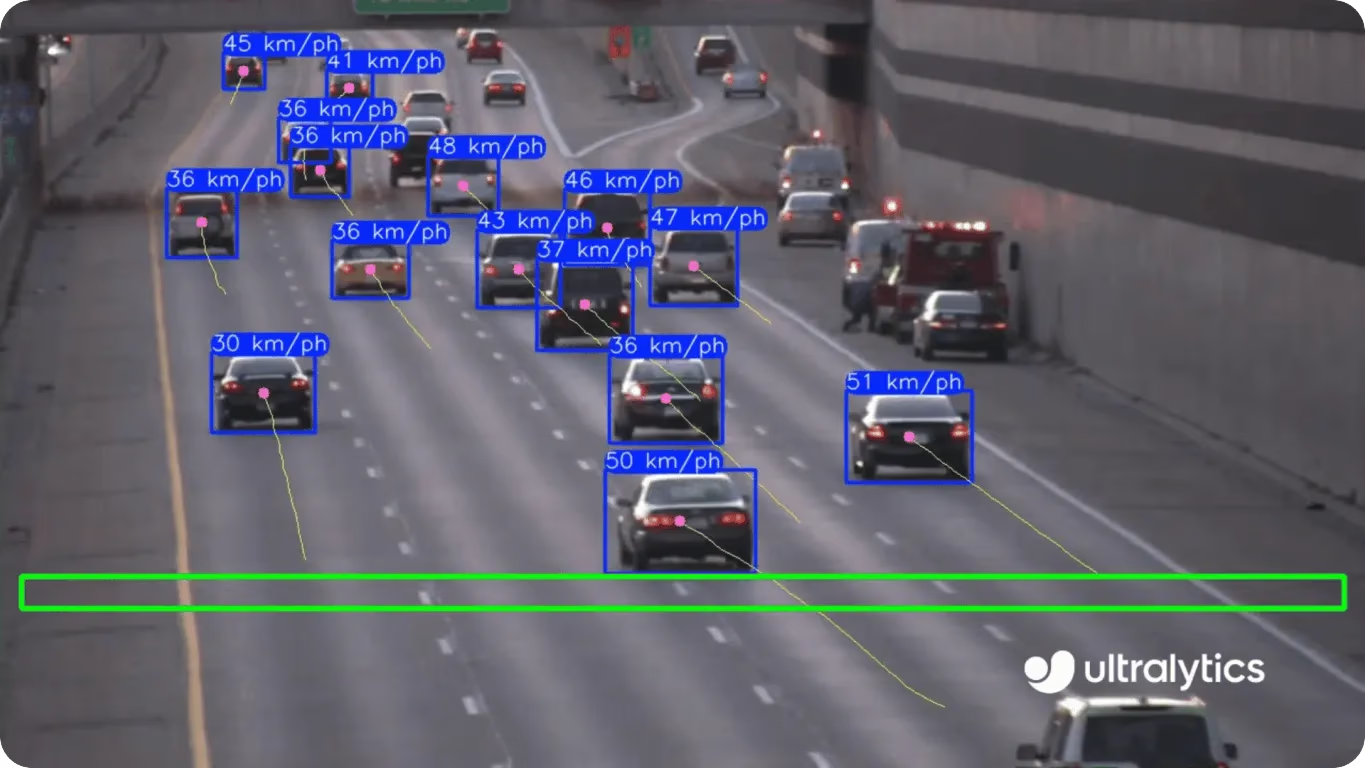
그림 1. 차량 추적 및 속도 추정을 위해 YOLO11을 사용하는 예시 (Source)
이 문서에서는 차량 재식별의 작동 방식, 이를 가능하게 하는 기술, 그리고 지능형 교통 시스템에서 어디에 사용되고 있는지 살펴봅니다. 시작해 보겠습니다!
Link to this section차량 재식별이란 무엇입니까?#
차량 재식별은 computer vision의 중요한 애플리케이션입니다. 이는 도시를 이동하는 차량의 정체성을 일관되게 유지하면서, 서로 다르며 겹치지 않는 카메라 전체에 나타나는 동일한 차량을 인식하는 데 중점을 둡니다. 각 카메라가 차량을 다른 각도, 다른 조명, 또는 부분적인 가림 현상이 있는 상태에서 캡처할 수 있기 때문에 이는 어려운 작업입니다.
파란색 세단이 교차로를 통과한 후 다른 카메라가 감시하는 다른 거리에서 나타나는 시나리오를 고려해 보십시오. 각도, 조명, 배경이 모두 바뀌었고 다른 차들이 시야를 잠시 가릴 수도 있습니다. 그럼에도 불구하고 차량 재식별 시스템은 여전히 그것이 동일한 차량임을 판단해야 합니다.
특히 CNN(convolutional neural networks) 및 트랜스포머 기반 모델과 관련된 최근의 딥러닝 발전은 이 프로세스를 훨씬 더 정확하게 만들었습니다. 이러한 모델은 의미 있는 시각적 패턴을 추출하고 유사하게 생긴 차량들을 구별하면서도 올바른 차량을 식별할 수 있습니다.
지능형 교통 시스템에서 이 기능은 지속적인 모니터링, 경로 재구성 및 도시 전체의 교통 분석을 지원하여 스마트 시티 시스템이 차량의 이동 방식을 더 명확하게 파악하도록 돕습니다. 이는 안전성과 효율성을 개선하는 데 기여합니다.
Link to this section차량 재식별의 작동 방식 이해하기#
일반적으로 교차로, 주차 구역 및 고속도로의 비디오 영상은 차량 재식별 기술을 사용하여 동일한 차량이 여러 카메라에 걸쳐 나타나는지 확인합니다. 이 개념은 시스템이 여러 뷰에 걸쳐 개인을 추적하는 사람 재식별(person re-identification)과 유사하지만, 여기서는 사람의 외형 대신 차량 고유의 특징을 분석하는 데 중점을 둡니다.
이를 수행하는 과정에는 시스템이 차량을 탐지하고, 시각적 특징을 추출하며, 서로 다른 시점에서 차량을 안정적으로 일치시키는 데 도움을 주기 위해 설계된 몇 가지 주요 단계가 포함됩니다.
높은 수준에서 시스템은 먼저 각 프레임에서 차량을 탐지한 다음 색상, 모양, 질감과 같은 특징을 추출하여 각 차량에 대한 고유한 디지털 표현(또는 임베딩)을 생성합니다. 이러한 임베딩은 객체 추적 및 시공간 확인을 통해 지원되어, 두 번의 목격이 동일한 차량에 해당하는지 여부를 결정하기 위해 시간과 카메라 전반에 걸쳐 비교됩니다.
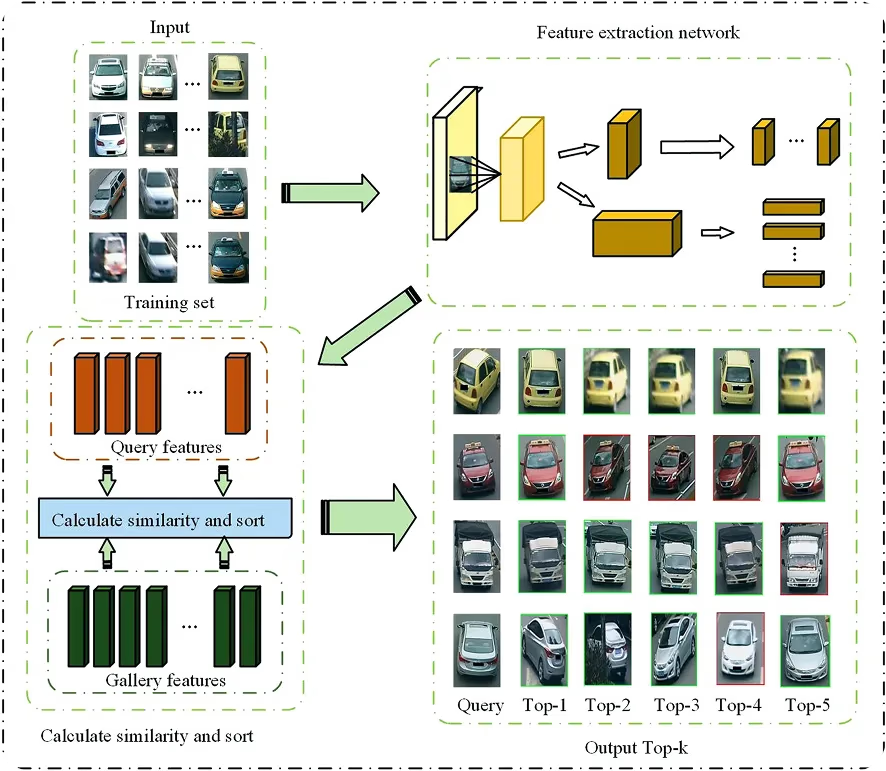
그림 2. 차량 재식별의 작동 방식. (Source)
이 프로세스를 자세히 살펴보겠습니다:
- Object detection: 시스템은 먼저 각 비디오 프레임 내에서 차량을 식별하고 위치를 파악하여 처리해야 할 영역을 정확히 파악합니다. 이 단계는 일반적으로 객체 탐지 모델에 의해 처리됩니다.
- Feature extraction: 탐지 후, 전용 Re-ID 또는 특징 추출 네트워크가 각 차량 크롭(crop)을 분석하고 색상, 모양, 질감 및 특징적인 부품과 같은 시각적 세부 정보를 캡처하는 특징 맵이나 특징 표현을 생성합니다.
- Embedding generation: 이렇게 추출된 특징들은 특징 임베딩이라는 수치 표현으로 변환됩니다. 이 임베딩은 차량이 다른 각도에서 어떻게 보이는지를 캡처하는 디지털 지문처럼 작동합니다. 매칭 전, 이러한 임베딩은 일반적으로 조명, 대비 또는 카메라 설정으로 인한 차이가 신원 비교를 방해하지 않도록 정규화됩니다. 정규화는 시스템이 노이즈가 아닌 의미 있는 신원 관련 특징에 집중하도록 보장합니다.
- Object tracking: 단일 카메라 뷰 내에서 추적 알고리즘은 프레임 간의 탐지 결과를 연결하여 차량이 장면을 이동할 때 일관된 ID를 유지하도록 돕습니다.
- Cross-camera matching: 서로 다른 카메라에서 동일한 차량을 매칭하기 위해, 시스템은 타이밍 및 위치 정보와 함께 (Re-ID 네트워크에 의해 생성된) 임베딩을 비교합니다. 이 단계는 카메라가 겹치지 않는 경우에도 두 목격 사례가 동일한 차량에 속하는지 여부를 결정합니다.
Link to this sectionUltralytics YOLO 모델이 차량 재식별을 지원하는 방법#
Ultralytics YOLO 모델은 차량 재식별 파이프라인에서 중요한 지원 역할을 합니다. 그 자체로 Re-ID를 수행하지는 않지만, Re-ID 네트워크가 정확한 카메라 간 매칭을 수행하는 데 의존하는 빠른 탐지 및 안정적인 추적과 같은 필수 기능을 제공합니다.
다음으로, YOLO11과 같은 Ultralytics YOLO 모델이 어떻게 차량 재식별 시스템을 향상시킬 수 있는지 자세히 살펴보겠습니다.
Link to this section정확한 차량 탐지 모듈: Re-ID 시스템의 첫 번째 부분#
모든 차량 재식별 시스템의 기초는 정확한 객체 탐지입니다. YOLO11과 같은 Ultralytics YOLO 모델은 부분적인 가림 현상, 교통 체증 또는 변화하는 조명 조건이 있는 혼잡한 장면에서도 각 프레임의 차량을 빠르게 탐지할 수 있으므로 이 작업에 아주 좋은 옵션입니다.
또한 맞춤형 학습이 가능하여 자체 데이터셋에서 모델을 미세 조정함으로써 택시, 배달용 밴 또는 차량군과 같은 특정 차량 유형을 인식하도록 가르칠 수 있습니다. 이는 솔루션이 더 전문적인 탐지를 요구할 때 특히 유용합니다. 깨끗하고 정확한 bbox를 제공함으로써 Ultralytics YOLO 모델은 Re-ID 네트워크가 작업할 수 있는 고품질 입력을 제공하여 카메라 간 매칭의 신뢰성을 높입니다.
Link to this section안정적인 단일 카메라 추적 지원#
차량이 탐지되면 YOLO11과 같은 모델은 단일 카메라 뷰 내에서 안정적인 객체 추적을 지원할 수도 있습니다. 객체 추적은 연속적인 프레임에서 탐지된 차량을 따라가며 차량이 이동함에 따라 일관된 ID를 할당하는 프로세스입니다.
Ultralytics Python package의 ByteTrack 및 BoT-SORT와 같은 추적 알고리즘에 대한 기본 지원을 통해, YOLO11은 차량이 장면을 이동할 때 일관된 ID를 유지할 수 있습니다. 이러한 안정적인 추적은 Re-ID 시스템이 작동하기 전에 신원 전환을 줄여주며, 궁극적으로 카메라 간 매칭의 정확도를 향상시킵니다.
Link to this section향상된 신원 안정성을 위한 선택적 트래커 수준 Re-ID#
표준 움직임 기반 추적 외에도, Ultralytics Python package는 BoT-SORT 트래커 내에 선택적 외관 기반 Re-ID 기능을 포함하고 있습니다. 즉, 트래커는 단순히 움직임 패턴이나 bbox 겹침뿐만 아니라 시각적 외관 특징을 사용하여 두 탐지 결과가 동일한 차량에 속하는지 판단할 수 있습니다.
활성화되면 BoT-SORT는 탐지기나 YOLO11 분류 모델에서 가벼운 외관 임베딩을 추출하고 이를 사용하여 프레임 간의 신원을 검증합니다. 이러한 추가적인 외관 정보는 짧은 가림 현상, 차량이 가깝게 지나갈 때, 또는 카메라 움직임으로 인한 작은 변화와 같은 어려운 상황에서 트래커가 더 안정적인 ID를 유지하도록 돕습니다.
이 내장된 Re-ID는 전체 카메라 간 차량 재식별을 대체하기 위한 것은 아니지만, 단일 카메라 뷰 내에서의 신원 일관성을 향상시키고 다운스트림 Re-ID 모듈이 신뢰할 수 있는 더 깔끔한 트랙렛을 생성합니다. 이러한 외관 기반 추적 기능을 사용하려면 BoT-SORT 트래커 구성 파일에서 “with_reid”를 “True”로 설정하고 어떤 모델이 외관 특징을 제공할지 선택하기만 하면 됩니다.
더 자세한 내용은 documentation page on object tracking을 확인하십시오. 여기에서 사용 가능한 Re-ID 옵션과 이를 구성하는 방법을 설명합니다.
Link to this sectionRe-ID 네트워크에 고품질 입력 제공#
추적 중 신원 안정성을 개선하는 것 외에도, YOLO 모델은 Re-ID 네트워크 자체를 위해 깨끗한 시각적 입력을 준비하는 데 중요한 역할을 합니다.
차량이 탐지된 후, bbox는 일반적으로 크롭되어 매칭에 필요한 시각적 특징을 추출하는 재식별 네트워크로 전송됩니다. Re-ID 모델은 이러한 크롭된 이미지에 크게 의존하기 때문에, 흐릿하거나 잘못 정렬되거나 불완전한 크롭과 같은 불량한 입력은 더 약한 임베딩과 덜 신뢰할 수 있는 카메라 간 매칭을 초래할 수 있습니다.
Ultralytics YOLO 모델은 관심 차량을 완전히 캡처하는 깨끗하고 잘 정렬된 bbox를 지속적으로 생성하여 이러한 문제를 줄이는 데 도움을 줍니다. 더 선명하고 정확한 크롭을 통해 Re-ID 네트워크는 색상, 모양, 질감 및 기타 구별되는 특징과 같은 의미 있는 세부 정보에 집중할 수 있습니다. 고품질 입력은 카메라 뷰 전반에서 더 신뢰할 수 있고 정확한 Re-ID 성능으로 이어집니다.
Link to this sectionRe-ID 모델과 결합하여 카메라 간 매칭 활성화#
Ultralytics YOLO 모델이 자체적으로 재식별을 수행하지는 않지만, 재식별 네트워크가 서로 다른 카메라 뷰에서 차량을 비교하는 데 필요한 중요한 정보를 제공합니다. YOLO11과 같은 모델은 각 카메라 내에서 차량의 위치를 파악하고 추적하는 역할을 담당하며, Re-ID 모델은 서로 다른 위치의 두 차량 크롭이 동일한 신원에 속하는지 결정합니다.
이 구성 요소들이 함께 작동하면(탐지 및 추적을 위한 YOLO, 특징 추출을 위한 전용 임베딩 모델), 완전한 다중 카메라 차량 매칭 파이프라인이 형성됩니다. 이를 통해 더 큰 카메라 네트워크를 통과하는 동일한 차량을 연결할 수 있습니다.
예를 들어, 최근 연구에서 연구원들은 온라인 다중 카메라 추적 시스템의 vehicle detector로 가벼운 YOLO11 모델을 사용했습니다. 이 연구는 YOLO11을 사용함으로써 정확도를 저하시키지 않으면서 탐지 시간을 줄였고, 이는 다운스트림 추적 및 카메라 간 매칭의 전반적인 성능을 향상시켰음을 발견했습니다.

그림 3. 여러 카메라에 걸친 YOLO11 기반 다중 차량 추적 및 재식별. (Source)
Link to this section차량 Re-ID를 위한 딥러닝 기반 아키텍처#
이제 Ultralytics YOLO 모델이 차량 재식별을 어떻게 지원할 수 있는지 더 잘 이해하게 되었으니, 특징 추출 및 매칭 단계를 처리하는 딥러닝 모델을 자세히 살펴보겠습니다. 이 모델들은 차량의 모습을 학습하고, 강력한 임베딩을 생성하며, 서로 다른 카메라 뷰에서 시각적으로 유사한 차량을 구별하는 역할을 합니다.
다음은 객체 재식별 시스템에 사용되는 핵심 딥러닝 구성 요소의 몇 가지 예입니다:
-
Feature extraction과 CNN: ResNet50 또는 ResNet101과 같은 컨볼루션 신경망은 패턴 인식을 통해 심층 특징을 학습하며, 차량을 서로 구별하는 색상, 모양, 질감과 같은 요소를 식별합니다. 이렇게 학습된 패턴은 차량의 고유한 디지털 표현 역할을 하는 임베딩으로 변환됩니다.
-
Attention mechanisms 및 트랜스포머: 공간 어텐션을 포함한 어텐션 네트워크 및 레이어는 전조등, 창문 또는 번호판 영역과 같은 차량의 중요한 영역을 강조하는 데 도움을 줄 수 있습니다. 공간 어텐션은 모델이 가장 유익한 시각적 단서가 위치한 곳에 집중하도록 하며, Vision Transformers (ViT)와 같은 트랜스포머 기반 모델은 전체 이미지에 걸친 전역 관계를 캡처합니다. 함께 사용하면 차량이 매우 비슷해 보일 때 세밀한 정확도가 향상됩니다.
-
부분 기반 및 다중 브랜치 네트워크: 일부 Re-ID 모델은 지붕, 후미등 또는 측면 패널과 같은 특정 차량 영역을 별도로 분석한 다음 결과를 결합합니다. 즉, 차량이 부분적으로 가려지거나 어려운 각도에서 보일 때도 시스템이 강력하게 유지됩니다.
이러한 아키텍처 구성 요소 외에도, 미터릭 학습(metric learning)은 차량 Re-ID 모델 학습에 핵심적인 역할을 합니다. triplet loss, contrastive loss 및 cross-entropy loss와 같은 손실 함수는 동일한 차량의 이미지는 더 가깝게 당기고 다른 차량의 이미지는 더 멀리 밀어냄으로써 시스템이 강력하고 차별적인 임베딩을 학습하도록 돕습니다.
Link to this section인기 있는 차량 재식별 데이터셋 및 벤치마크#
컴퓨터 비전 연구에서 데이터셋의 품질은 모델이 배포되었을 때 얼마나 잘 작동하는지에 큰 영향을 미칩니다. 데이터셋은 모델이 학습하는 레이블이 지정된 이미지나 비디오를 제공합니다.
차량 재식별을 위해 이러한 최첨단 데이터셋은 조명, 시점 변화, 날씨 변화와 같은 다양한 조건을 캡처해야 합니다. 이러한 다양성은 모델이 실제 운송 환경의 복잡성을 처리하는 데 도움을 줍니다.
다음은 차량 재식별 모델의 학습, 최적화 및 평가를 지원하는 인기 있는 데이터셋에 대한 간략한 설명입니다:
- VeRi-776 dataset: 20개의 도시 카메라에서 캡처된 50,000개 이상의 주석이 달린 차량 이미지 모음입니다. 주석에는 차량 ID, 색상, 모델 및 번호판 영역이 포함되어 세부적인 특징 학습이 가능합니다.
- VehicleID dataset: 이 대규모 데이터셋은 26,000대 이상의 차량을 나타내는 200,000개 이상의 이미지를 가지고 있습니다. 확장성을 연구하고 다양한 방법 간의 기준 비교를 수행하기 위해 자주 선택됩니다.
- VeRi-Wild dataset: 시점, 날씨 및 부분적 가림 현상의 차이를 포함하여 실제 가변성을 반영하도록 설계되었습니다. 일반적으로 모델의 강건성과 일반화 능력을 평가하는 데 사용됩니다.

그림 4. VeRi-776 데이터셋의 차량 예시. (Source)
이러한 데이터셋에 대한 모델 성능은 일반적으로 mAP(mean average precision) 및 Rank-1 또는 Rank-5 정확도와 같은 메트릭을 사용하여 평가됩니다. mAP는 모델이 주어진 차량에 대해 모든 관련 일치 항목을 얼마나 정확하게 검색하는지 측정하며, Rank-1 및 Rank-5 점수는 올바른 일치 항목이 결과 목록의 상단에 나타나는지 또는 처음 몇 가지 예측 내에 나타나는지 나타냅니다.
이러한 벤치마크는 연구원들이 서로 다른 접근 방식을 일관되게 비교할 수 있는 방법을 제공하며 실제 사용을 위한 더 정확하고 신뢰할 수 있는 차량 재식별 시스템의 개발을 안내하는 데 중요한 역할을 합니다.
Link to this section차량 재식별의 애플리케이션#
기본 사항을 다루었으므로, 이제 차량 재식별이 실제 운송, 이동성 및 감시 워크플로우를 지원하는 몇 가지 실제 사용 사례를 살펴보겠습니다.
Link to this section도시 교통 감시 및 모니터링#
혼잡한 도시 도로는 항상 움직임으로 가득 차 있으며, 교통 카메라는 차량이 다른 구역으로 이동할 때 동일한 차량을 추적하는 데 어려움을 겪는 경우가 많습니다. 조명 변화, 혼잡한 장면 및 거의 동일하게 보이는 차량은 카메라 간에 신원을 잃게 만들 수 있습니다.
차량 재식별은 차량을 명확하게 탐지하고, 특징적인 특징을 추출하며, 저해상도 또는 혼잡한 영상에서도 일관된 ID를 유지함으로써 이를 해결합니다. 그 결과 네트워크 전체에서 더 원활하고 지속적인 추적이 가능해지며, 교통 팀은 차량이 도시를 이동하는 방식을 더 명확하게 파악하고 정체 및 사고에 대해 더 빠르고 정보에 입각한 대응을 할 수 있게 됩니다.
Link to this section스마트 주차 시스템#
스마트 주차 시설은 진입, 퇴장, 액세스 제어 및 공간 할당을 관리하기 위해 일관된 차량 식별에 의존합니다. 그러나 이러한 환경의 카메라는 종종 지하 차고, 그늘진 구역 또는 해 질 녘의 야외 주차장과 같이 비정상적인 각도와 어려운 조명 조건에서 차량을 캡처합니다.
이러한 조건은 서로 다른 구역에서 동일한 차량이 보이는지 확인하는 것을 더 어렵게 만듭니다. 신원이 일관되지 않으면 주차 기록이 끊어지고, 액세스 제어의 신뢰성이 떨어지며, 운전자가 지연을 경험할 수 있습니다. 이것이 바로 많은 스마트 주차 시스템이 차량이 시설을 이동할 때 각 차량에 대한 안정적인 신원을 유지하기 위해 차량 재식별 모델을 통합하는 이유입니다.
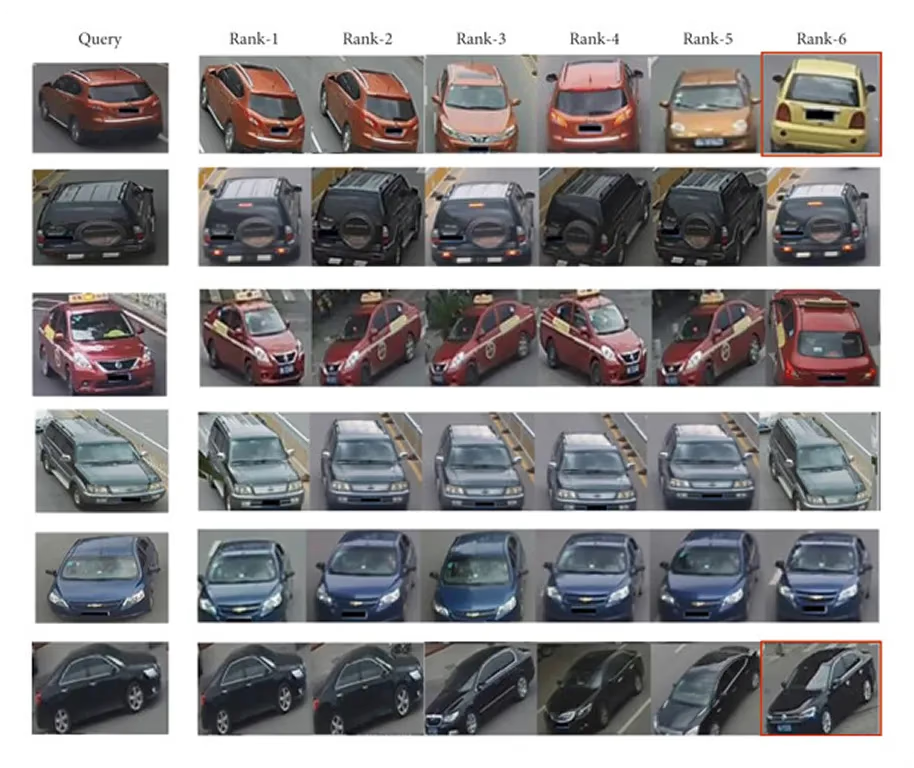
그림 5. 왼쪽의 선택된 차량 이미지와 오른쪽의 일치하는 검색 결과를 보여주는 차량 재식별 예시. (Source)
Link to this section법 집행 및 포렌식#
교통 모니터링을 기반으로 하는 차량 재식별은 법 집행 및 포렌식 조사에서도 중요한 역할을 합니다. 많은 경우 경찰관은 여러 카메라를 통해 차량을 추적해야 하지만, 번호판을 읽을 수 없거나 누락되었거나 고의로 가려져 있을 수 있습니다.
혼잡한 장면, 낮은 가시성 및 부분적인 가림 현상으로 인해 다른 차량들이 속기 쉬울 정도로 비슷해 보일 수 있어 수동 식별이 느리고 신뢰할 수 없게 됩니다. 차량 재식별은 번호판에만 의존하는 대신 시각적 특징을 분석하여 겹치지 않는 카메라 네트워크 전체에서 차량의 이동을 추적하는 데 사용될 수 있습니다.
즉, 수사관은 차량의 이동을 더 쉽게 따라가고, 서로 다른 위치에서 언제 나타났는지 파악하며, 사고 전후의 경로를 확인할 수 있습니다. AI 기반 차량 재식별은 용의 차량 추적, 사고 영상 검토 또는 이벤트 전후에 차량이 어느 방향으로 이동했는지 결정하는 작업도 지원합니다.
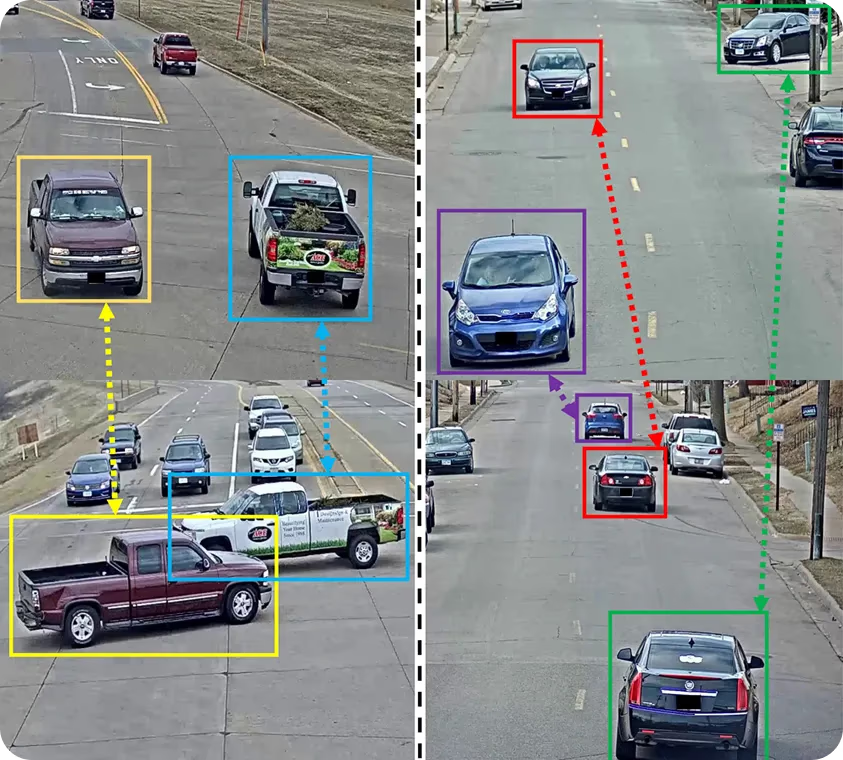
그림 6. 다양한 관점에서 여러 카메라에 걸쳐 일치된 차량. (Source)
Link to this section차량군 및 물류 추적#
차량군 및 물류 운영은 종종 GPS, RFID 태그 및 수동 로그에 의존하여 차량 이동을 추적하지만, 이러한 도구는 하역장, 창고 마당 및 내부 도로 네트워크와 같이 보안 또는 마당 카메라가 덮는 영역에 공백을 남깁니다.
차량은 자주 겹치지 않는 카메라 사이를 이동하고, 구조물 뒤로 사라지며, 차량군의 다른 차량들과 거의 동일하게 보이기 때문에 서로 다른 위치에서 동일한 차량이 목격되었는지 확인하기 어렵습니다. 차량 재식별 시스템은 시설을 이동하는 각 차량에 대해 일관된 신원을 유지하기 위해 시각적 세부 정보와 타이밍 정보를 분석하여 이러한 공백을 메우는 데 도움을 줄 수 있습니다.
이는 차량군 관리자가 허브 내부의 활동을 더 완벽하게 파악하게 하여 배송 경로 확인, 비정상적인 움직임 식별 및 차량이 예상 경로를 따르는지 확인하는 것과 같은 작업을 지원합니다.
Link to this section차량 Re-ID 작업의 장단점#
다음은 AI 기반 차량 재식별 사용의 몇 가지 주요 이점입니다:
- 수동 작업 감소: 차량 재식별은 광범위한 수동 검토가 필요한 신원 매칭 작업을 자동화하여 비디오 영상을 분석하는 데 필요한 시간과 노력을 크게 줄여줍니다.
- 자동화 및 실시간 인사이트: 탐지, 추적 및 특징 매칭을 결합하여 차량 재식별은 지속적인 자동 모니터링을 지원하며 더 빠른 사고 대응을 위한 실시간 알림을 제공할 수 있습니다.
- 확장성 및 적응성: Re-ID 모델은 강력한 특징 학습, 다중 스케일 특징 추출 및 시각적 변화에도 안정적으로 유지되는 불변 표현을 통해 새로운 환경, 조명 조건 또는 카메라 각도에 적응할 수 있습니다. 이러한 기능 덕분에 대도시 네트워크와 소규모 배포 환경 모두에 적합합니다.
차량 재식별은 많은 장점을 제공하지만 고려해야 할 몇 가지 제한 사항도 있습니다. 다음은 실제 환경에서의 신뢰성에 영향을 미치는 몇 가지 요소입니다:
- 높은 연산 요구 사항: 특징 추출, 임베딩 생성 및 카메라 간 매칭은 특히 대규모 카메라 네트워크를 모니터링할 때 상당한 처리 능력을 필요로 합니다.
- 환경적 가변성: 야간 조명, 날씨 변화, 그림자 및 가림 현상과 같은 요소는 장면 전반에서 일관된 신원을 유지하는 모델의 능력을 저하시킬 수 있습니다.
- 데이터셋 및 도메인 제한 사항: 제한적이거나 이상적인 데이터셋에서 학습된 모델은 추가적인 미세 조정이나 도메인 적응 없이는 실제 조건으로 잘 일반화되지 않을 수 있습니다.
Link to this section차량 재식별 방법의 향후 전망#
차량 재식별은 기술이 발전함에 따라 계속 발전하고 있습니다. IEEE, CVPR 및 arXiv의 최근 출판물과 국제 컨퍼런스에서의 발표는 여러 데이터 소스와 더 발전된 특징 추론을 결합하는 더 풍부한 모델로의 명확한 전환을 강조합니다. 이 분야의 향후 연구는 더 강력하고 효율적이며 대규모로 실제 가변성을 처리할 수 있는 시스템을 구축하는 데 초점을 맞출 가능성이 높습니다.
예를 들어, 한 가지 유망한 방향은 transformer-based models 및 그래프 집계 네트워크를 사용하는 것입니다. 트랜스포머는 전체 이미지를 분석하고 모든 시각적 세부 정보가 어떻게 함께 맞는지 이해할 수 있으며, 이는 각도나 조명이 변경되어도 시스템이 동일한 차량을 인식하도록 돕습니다.
그래프 기반 모델은 서로 다른 차량 부품이나 카메라 뷰를 네트워크의 연결된 지점으로 처리함으로써 이를 한 단계 더 발전시킵니다. 이를 통해 시스템은 해당 주요 지점 간의 상관관계를 파악하여 차량 식별 및 판별 특징에 대해 더 나은 결정을 내릴 수 있습니다.
또 다른 주요 발전은 multi-modal data fusion 및 특징 융합입니다. 최신 시스템은 이미지에만 의존하는 대신 시각적 정보와 GPS 데이터 또는 센서의 움직임 패턴과 같은 다른 멀티미디어 신호를 결합합니다. 이러한 추가적인 컨텍스트를 통해 시스템은 차량이 부분적으로 가려지거나 조명이 나쁘거나 카메라 각도가 갑자기 변경될 때도 정확성을 더 쉽게 유지할 수 있습니다.
Link to this section핵심 요약#
차량 재식별은 지능형 교통 시스템의 핵심 방법론으로 자리 잡고 있으며, 도시가 서로 다른 카메라 전반에서 차량을 더 안정적으로 추적할 수 있도록 돕고 있습니다. 딥러닝의 발전과 더 풍부하고 다양한 데이터셋을 사용한 더 나은 검증 덕분에 이러한 시스템은 실제 환경에서 점점 더 정확하고 실용적이 되어가고 있습니다.
기술이 발전함에 따라 개인정보 보호, 보안, 윤리에 관한 책임 있는 관행과 혁신 사이의 균형을 맞추는 것이 중요합니다. 전반적으로 이러한 발전은 더 스마트하고 안전하며 효율적인 교통 네트워크를 구축하는 기반을 마련하고 있습니다.
저희 GitHub 리포지토리를 방문하고 커뮤니티에 가입하여 AI에 대해 더 많이 알아보세요. 솔루션 페이지를 확인하여 로봇 공학 분야의 AI와 제조업의 컴퓨터 비전에 대해 알아보세요. 오늘 바로 라이선스 옵션을 살펴보고 비전 AI를 시작해 보세요!






