Um guia para calibração de câmeras para visão computacional em 2025
Saiba como a calibração de câmeras aprimora a visão computacional ao corrigir distorções, melhorar a estimativa de profundidade e aumentar a precisão em diversas aplicações.

As câmeras não veem o mundo como os humanos. Muitas vezes, acabam capturando imagens com distorções e mudanças de perspectiva que podem afetar a precisão dos modelos de IA de visão. A calibração de câmera pode corrigir essas distorções e garantir que os modelos de visão computacional consigam perceber objetos como eles realmente são no mundo real. Esse processo envolve a correção da distorção da lente, ajustes na distância focal e o alinhamento de sensores para ajudar as câmeras a capturar imagens precisas.
Especificamente, uma calibração de câmera precisa é fundamental para estimar profundidade e medir distâncias corretamente. Modelos de IA de visão como o Ultralytics YOLO11 precisam de entradas bem calibradas para realizar diversas tarefas de visão computacional, como detecção de objetos e estimativa de pose. Sem as imagens de entrada adequadas, o desempenho do modelo pode cair e levar a erros em aplicações do mundo real.
Diferentes métodos de calibração de câmera, desde padrões de tabuleiro de xadrez tradicionais até técnicas avançadas baseadas em IA, podem ajudar a melhorar a precisão. Por exemplo, a calibração 3D (tridimensional) ajuda os modelos a entender a profundidade, enquanto uma matriz de calibração converte coordenadas do mundo real para o espaço da imagem, garantindo maior precisão.
Neste guia, abordaremos o básico da calibração de câmera para visão computacional, incluindo parâmetros-chave, diferentes métodos e otimização para aplicações de IA no mundo real.
Link to this sectionA importância da calibração de câmera na visão computacional#
A calibração de câmera é usada para ajustar as configurações de uma câmera para garantir que as imagens correspondam com precisão às medidas do mundo real. Ela garante que os objetos em uma imagem apareçam na posição, tamanho e proporção corretos, evitando distorções que poderiam enganar os modelos de IA.
Sem a calibração adequada, as câmeras podem causar distorção de lente, fazendo com que os objetos pareçam esticados ou desalinhados. Isso afeta a precisão da detecção de objetos, rastreamento e estimativa de profundidade, levando a erros em aplicações movidas a IA. Em particular, modelos como o YOLO11 têm um desempenho mais eficaz quando os dados de entrada são devidamente calibrados, reduzindo erros na interpretação espacial e melhorando a tomada de decisões no mundo real.
A calibração precisa é especialmente importante quando se trata de drones, carros autônomos e visão robótica. O desalinhamento nesses sistemas pode levar a cálculos de distância incorretos, impactando tarefas como navegação e detecção de obstáculos.
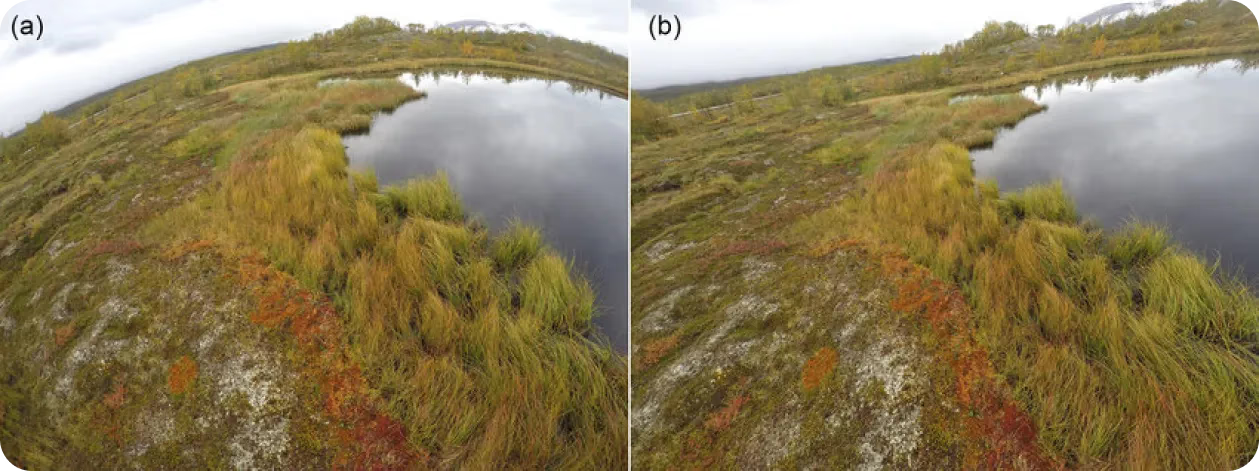
Fig 1. Um exemplo de uma distorção de lente (à esquerda) corrigida usando calibração de câmera (à direita).
Link to this sectionExplorando os efeitos da distorção de lente#
Distorções de lente podem fazer com que uma câmera represente incorretamente as formas e posições dos objetos em uma imagem. Aqui estão alguns exemplos de diferentes tipos de distorções de lente:
- Distorção em barril: Aqui, linhas retas parecem curvar-se para fora, fazendo com que objetos no centro da imagem pareçam inchados. Isso é comum em lentes grande-angulares e pode atrapalhar a calibração 3D em sistemas autônomos ao distorcer a percepção de profundidade.
- Distorção em almofada: Neste caso, linhas retas dobram-se para dentro em direção ao centro da imagem, criando o efeito oposto à distorção em barril.
- Distorção em bigode: Isso ocorre quando as distorções em barril e em almofada se combinam, fazendo com que linhas retas se curvem em um padrão de onda.
- Aberração cromática: Isso acontece quando uma lente não consegue focar as cores no mesmo ponto, criando franjas coloridas ao redor dos objetos.
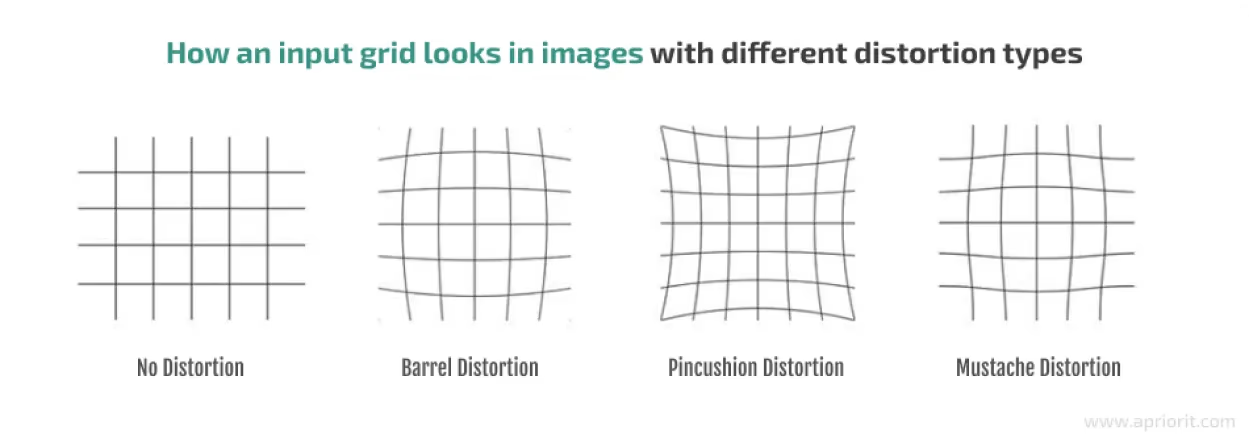
Fig 2. Diferentes tipos de distorções de lente.
Link to this sectionTipos de calibração de câmera#
A calibração de câmera consiste em dois componentes principais: parâmetros intrínsecos, que definem as características internas da câmera, e parâmetros extrínsecos, que determinam sua posição e orientação em relação ao mundo. Vamos examinar mais de perto ambos os tipos de componentes.
Link to this sectionParâmetros intrínsecos#
Uma calibração intrínseca precisa pode melhorar as previsões do modelo ao garantir que os objetos detectados apareçam na posição e escala corretas em aplicações do mundo real. Aqui está uma visão rápida de alguns parâmetros intrínsecos:
- Distância focal: Ela controla como uma câmera projeta objetos 3D em uma imagem 2D. Se estiver mal calibrada, os objetos podem parecer esticados ou comprimidos, alterando seu tamanho e distância percebidos.
- Ponto principal: Representa o centro óptico do sensor da câmera. Se estiver deslocado, pode deslocar a imagem inteira, levando a desalinhamentos no posicionamento dos objetos.
- Coeficiente de distorção (Skew): Ele contabiliza arranjos de pixels não retangulares no sensor. Quando o skew está presente, a imagem pode parecer inclinada ou deformada em vez de devidamente alinhada.
- Coeficientes de distorção: Esses parâmetros corrigem distorções ópticas causadas pela lente. Sem correção, linhas retas podem parecer curvas, especialmente perto das bordas da imagem.
Link to this sectionParâmetros extrínsecos#
A calibração extrínseca determina como uma câmera está posicionada e orientada em relação ao mundo real, o que é especialmente importante em sistemas multikâmeras usados para calibração 3D, rastreamento de objetos e percepção de profundidade. Isso ajuda drones, veículos autônomos e sistemas de vigilância a interpretar com precisão as relações espaciais.
Aqui estão dois parâmetros extrínsecos principais:
- Matriz de translação: Define a localização física da câmera no espaço 3D, especificando sua posição ao longo dos eixos X, Y e Z. Se mal calibrada, os objetos podem parecer mais próximos ou mais distantes do que realmente são, levando a medições de distância incorretas. Em veículos autônomos, isso pode resultar em uma detecção deficiente de obstáculos, enquanto na robótica, pode causar erros de posicionamento durante a manipulação de objetos.
- Matriz de rotação: Determina a orientação da câmera ao especificar o quanto ela está inclinada, girada ou angulada em relação a um ponto de referência. Se não for calibrada corretamente, imagens de várias câmeras podem não se alinhar adequadamente, causando problemas na reconstrução 3D, rastreamento com múltiplas câmeras e mapeamento espacial. Por exemplo, em um carro autônomo, uma matriz de rotação incorreta pode desalinhar as entradas dos sensores, levando a uma detecção imprecisa da faixa.
Link to this sectionConhecendo a matriz de calibração da câmera#
Cada imagem capturada por uma câmera é uma representação 2D de um mundo 3D. Modelos de IA precisam de uma maneira de traduzir entre essas dimensões para fazer previsões precisas. É aqui que entra a matriz de calibração da câmera. Ela mapeia pontos do mundo real no plano da imagem da câmera para que os objetos pareçam estar corretamente posicionados.
Simplificando, a matriz de calibração da câmera é um modelo matemático que representa os parâmetros intrínsecos de uma câmera. Ela é normalmente armazenada em sistemas de visão e usada em algoritmos de processamento de imagem para corrigir distorções e mapear pontos 3D para coordenadas 2D.
Como veremos a seguir, a matriz é calculada usando métodos de calibração como detecção de padrão de tabuleiro de xadrez, calibração baseada em objeto 3D e autocalibração impulsionada por IA, que estimam parâmetros-chave analisando imagens de pontos de referência conhecidos.
Link to this sectionVários métodos de calibração de câmera#
Existem vários métodos de calibração de câmera, cada um adequado para casos de uso específicos. Métodos tradicionais dependem de padrões físicos, enquanto técnicas impulsionadas por IA usam aprendizado profundo para automatizar o processo.
Vamos percorrer esses métodos e explorar como eles melhoram a precisão em diferentes aplicações.
Link to this sectionMétodos tradicionais de calibração de câmera#
Um dos métodos de calibração de câmera mais comuns usa um tabuleiro de xadrez ou padrão de grade colocado na frente da câmera. O sistema detecta pontos-chave no padrão para calcular os parâmetros de calibração.
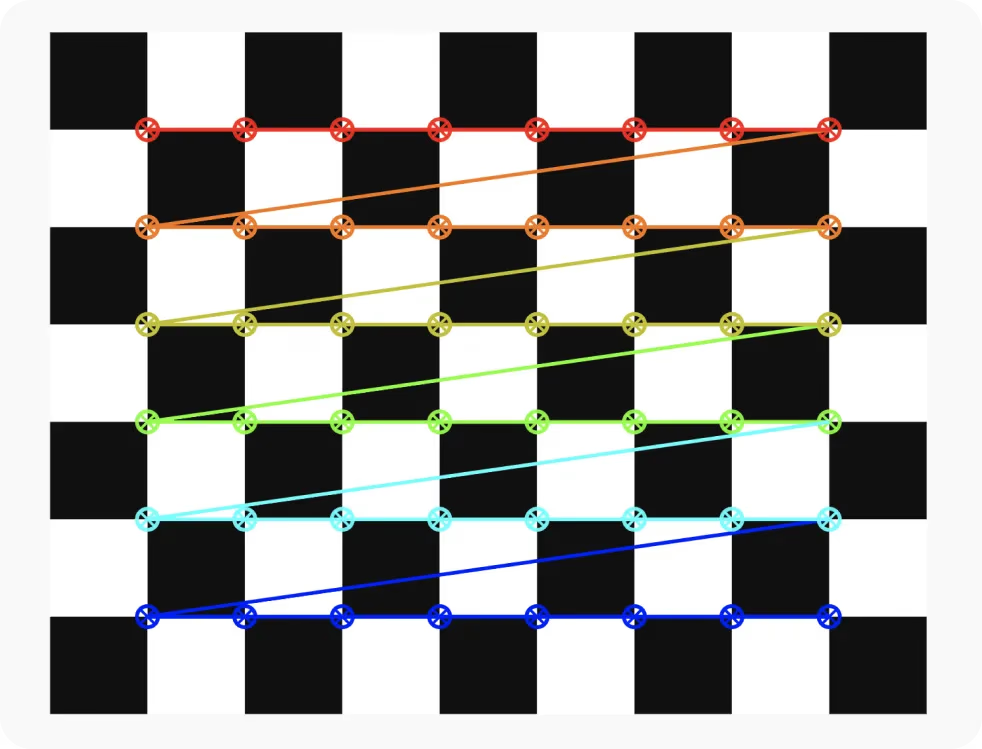
Fig 3. Um tabuleiro de xadrez de calibração de câmera.
Embora útil em ambientes controlados, requer ajustes manuais e a análise de várias imagens de diferentes ângulos. Mudanças nas condições de iluminação ou movimentos inesperados da câmera podem reduzir a precisão, tornando a recalibração necessária.
Em ambientes dinâmicos, como drones e carros autônomos, a calibração tradicional tem dificuldade em acompanhar o ritmo. Uma câmera em movimento exige recalibração frequente para manter a precisão, o que é impraticável com padrões estáticos. Essa limitação impulsionou avanços na calibração de câmera baseada em IA, oferecendo maior flexibilidade e automação.
Link to this sectionMétodos de calibração de câmera impulsionados por IA#
Técnicas impulsionadas por IA automatizam a calibração da câmera usando modelos de aprendizado profundo para a autocalibração, reduzindo a necessidade de ajustes manuais. Esses métodos estimam parâmetros intrínsecos e extrínsecos diretamente a partir de imagens do mundo real, eliminando a necessidade de padrões predefinidos.
Da mesma forma, datasets sintéticos estão transformando a calibração de câmera ao fornecer aos modelos de IA dados de treinamento diversos e rotulados para refinar parâmetros e corrigir distorções. Esses conjuntos de dados simulam condições do mundo real, ajudando modelos de IA a aprender a ajustar parâmetros intrínsecos e extrínsecos dinamicamente sem intervenção humana.
Por exemplo, frameworks de autocalibração usam modelos probabilísticos e aprendizado profundo para analisar imagens monoculares, estimar estruturas 3D e refinar continuamente a calibração. Dados sintéticos melhoram esse processo ao treinar modelos para lidar com perspectivas variadas, desalinhamentos de sensores e condições de iluminação, melhorando a estimativa de profundidade, rastreamento de obstáculos e precisão espacial em aplicações como direção autônoma e robótica.

Fig 4. Um sistema de visão por IA de autocalibração que pode entender o tráfego.
Link to this sectionAplicações-chave da calibração de câmera#
Agora que entendemos o que é a calibração de câmera, vamos explorar seu impacto em vários setores.
Link to this sectionVeículos autônomos e navegação de drones#
Para carros autônomos e drones autônomos, a calibração precisa da câmera é importante para uma navegação segura e confiável. Esses sistemas dependem de estimativa de profundidade e cálculo de distância para detectar obstáculos, rastrear marcações de estrada e avaliar objetos ao redor. Uma calibração deficiente pode causar interpretações equivocadas de distância, levando a decisões incorretas em cenários em tempo real.
Uma matriz devidamente calibrada permite que veículos autônomos mesclem entradas de LiDAR, radar e câmeras, melhorando a fusão de multisensores. Isso ajuda o veículo a avaliar com precisão distâncias para pedestres, limites de faixa e carros próximos, reduzindo o risco de acidentes. Enquanto isso, em drones, a calibração 3D ajuda a manter a estabilidade de altitude e rastrear objetos com precisão para uma navegação exata em ambientes dinâmicos.

Fig 5. Uma câmera calibrada em um carro autônomo.
Link to this sectionRealidade aumentada (AR) e realidade virtual (VR)#
Aplicações de AR e VR dependem de calibração precisa da câmera para alinhar conteúdo digital com objetos do mundo real. Se não for calibrado corretamente, overlays de AR podem desviar, parecer desalinhados ou escalar incorretamente, interrompendo a experiência do usuário.
A correção de distorção de lente é fundamental para fazer com que objetos virtuais se misturem perfeitamente a ambientes reais. Sem ela, distorções podem quebrar a imersão e reduzir a precisão em jogos, simulações de treinamento e imagem médica. Além disso, na VR, a calibração melhora o rastreamento preciso de movimentos de cabeça e mãos, melhorando a capacidade de resposta e criando uma experiência mais suave e imersiva.

Fig 6. Uma configuração de calibração de câmera 3D usada para refinar medições espaciais.
Link to this sectionVisão robótica e automação industrial#
Para que robôs consigam ver e interagir com o mundo com precisão, a calibração adequada da câmera é crucial. Na automação industrial, robôs dependem da estimativa de profundidade para pegar, colocar e manipular objetos com precisão. Sem a calibração adequada, desalinhamentos podem causar erros em embalagens, montagem e inspeções de controle de qualidade.
Um desafio fundamental na robótica é medir com precisão objetos planos. A calibração ajuda braços robóticos a detectar dimensões exatas, evitando erros de cálculo que poderiam retardar ou interromper a produção. A calibração 3D leva isso um passo adiante, permitindo que robôs se adaptem conforme objetos ou posições mudam.
Link to this sectionPrincipais pontos#
A calibração de câmera é um componente crítico de muitas soluções de visão computacional. Ela garante que modelos de IA interpretem imagens com precisão para tarefas como detecção de objetos, rastreamento e estimativa de profundidade. Parâmetros intrínsecos e extrínsecos ajudam a alinhar imagens com medidas do mundo real para evitar distorções que poderiam afetar aplicações impulsionadas por IA.
A correção de distorção de lente é fundamental para aplicações de realidade aumentada, automação industrial e sistemas de múltiplas câmeras. À medida que a IA avança, métodos automatizados de calibração de câmera estão melhorando a eficiência, a precisão e a confiabilidade de longo prazo em aplicações do mundo real.






