Explorando a visão computacional em aplicações de navegação
Veja como a visão computacional em soluções de navegação aprimora o mapeamento em tempo real, o reconhecimento de objetos e a realidade aumentada para experiências de viagem mais inteligentes e seguras.

Hoje em dia, pegar o celular, digitar um destino e seguir instruções passo a passo para chegar lá parece algo sem esforço. É algo que leva apenas alguns segundos. Mas essa conveniência cotidiana é o resultado de anos de progresso tecnológico. A navegação percorreu um longo caminho, desde mapas de papel e bússolas até sistemas inteligentes capazes de entender e responder ao mundo em tempo real.
Uma das tecnologias por trás dessa mudança é a visão computacional, um ramo da inteligência artificial (IA) que permite que máquinas interpretem informações visuais como os humanos fazem. Ferramentas de navegação de ponta agora utilizam imagens em tempo real de satélites, câmeras veiculares e sensores de nível de rua para melhorar a precisão dos mapas, monitorar as condições das estradas e guiar usuários através de ambientes complexos.
Neste artigo, exploraremos como a visão computacional está aprimorando a navegação ao melhorar mapas de GPS, oferecendo atualizações de tráfego em tempo real e dando suporte a tecnologias como navegação por realidade aumentada e veículos autônomos.
Link to this sectionSistemas de navegação por IA com mapeamento 3D imersivo#
Usar ferramentas como o Google Maps para navegar na vida cotidiana tornou-se muito comum, seja para atravessar a cidade ou procurar um café próximo. À medida que as tecnologias de IA são mais amplamente adotadas, estamos vendo recursos cada vez mais avançados, como o Immersive View, introduzido em 2023 pelo Google Maps, que permite aos usuários visualizar partes de sua jornada em um ambiente 3D. Isso é possível através de uma combinação de IA, fotogrametria e visão computacional.
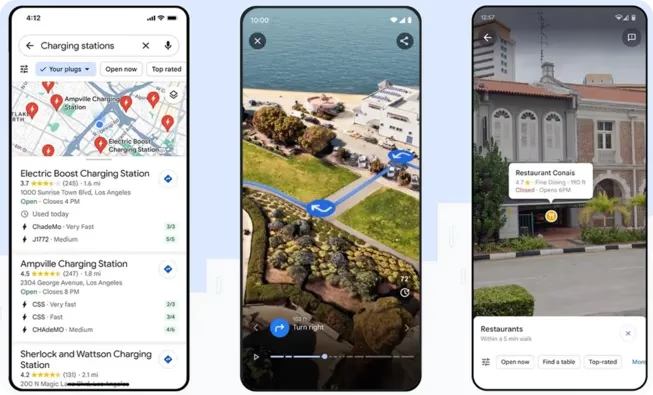
Fig 1. Immersive View do Google Maps.
Tudo começa com bilhões de imagens de alta resolução capturadas por uma gama de equipamentos especializados. Isso inclui carros do Street View, veículos equipados com câmeras de 360 graus que circulam pelas cidades, e dispositivos Trekker, mochilas vestíveis com câmeras montadas usadas para capturar imagens em locais que veículos não conseguem alcançar, como trilhas de caminhada ou vielas estreitas.
Essas imagens são alinhadas com dados de mapas usando fotogrametria, uma técnica que une fotos 2D tiradas de diferentes ângulos para criar modelos 3D precisos de ruas, edifícios e terreno.
A visão computacional é então usada para analisar esses modelos usando detecção de objetos e segmentação de imagem para identificar e rotular características importantes, como placas de trânsito, calçadas, faixas de pedestres e entradas de edifícios.

Fig 2. O Immersive View usa segmentação para segmentar objetos em uma rua.
Os dados rotulados são usados para treinar sistemas de IA que reconhecem como as dicas visuais diferem entre regiões. Por exemplo, o sistema pode distinguir facilmente entre uma placa de "LENTO" nos Estados Unidos, que normalmente é um diamante amarelo ou laranja, e uma placa semelhante no Japão, que geralmente é um triângulo vermelho e branco. Esse nível de compreensão torna a experiência de navegação mais precisa e culturalmente consciente.
Finalmente, o Immersive View sobrepõe caminhos de navegação ao vivo no ambiente 3D, oferecendo uma experiência fluida e intuitiva que mostra exatamente para onde você está indo.
Link to this sectionRealidade aumentada em soluções de navegação#
Provavelmente todos nós já passamos pela experiência de dar voltas e tentar descobrir em qual direção o Google Maps está nos apontando. Essa confusão é exatamente o que a navegação por realidade aumentada (AR), uma tecnologia que sobrepõe informações digitais à visualização da câmera do mundo real, visa resolver. Ela está mudando a forma como as pessoas se orientam em locais movimentados, como ruas de cidades ou grandes áreas internas.
Mapas comuns podem ser difíceis de seguir, especialmente quando os sinais de GPS estão fracos ou não funcionam bem. A navegação AR resolve isso exibindo direções digitais, setas e rótulos diretamente na visualização ao vivo da câmera do mundo real. Isso significa que os usuários veem orientações que correspondem às ruas e edifícios ao seu redor, tornando muito mais fácil saber para onde ir.
Link to this sectionComo a realidade aumentada é usada na navegação#
A navegação AR depende de modelos de visão computacional para entender o ambiente através da câmera de um dispositivo. Isso envolve várias tarefas, como localização de imagem, que detecta características como bordas de edifícios ou placas de rua e as combina com um mapa armazenado. A localização e mapeamento simultâneos (SLAM) criam um mapa do ambiente enquanto rastreiam a posição do dispositivo em tempo real.
Por exemplo, o Aeroporto de Zurique foi o primeiro a implementar o Live View do Google Maps para navegação interna. Os passageiros podem usar as câmeras de seus celulares para ver setas e direções sobrepostas no ambiente do mundo real, guiando-os pelos terminais até portões, lojas e serviços. Isso melhora a experiência do passageiro ao tornar a navegação em espaços internos complicados mais fácil.

Fig 3. O Aeroporto de Zurique usa visão computacional e AR para guiar passageiros em ambientes internos.
Link to this sectionAumentando a segurança viária com sistemas de navegação por IA#
As ruas da cidade estão ficando mais movimentadas a cada dia. Com mais carros na estrada, calçadas lotadas e atividade constante, manter o tráfego fluindo de forma suave e segura é um desafio crescente. Para ajudar a gerenciar o caos, muitas cidades estão recorrendo à IA e à visão computacional.
Câmeras inteligentes e sensores instalados em cruzamentos e ao longo das estradas capturam um fluxo constante de dados visuais. Essa filmagem é processada em tempo real para detectar acidentes, monitorar o fluxo de tráfego, identificar buracos e detectar coisas como estacionamento ilegal ou comportamento de risco dos pedestres.
Um exemplo interessante disso é a Smart Airport Expressway em Hangzhou, na China. Esta rodovia de 20 quilômetros, que conecta o centro de Hangzhou ao Aeroporto Internacional de Xiaoshan, foi atualizada com câmeras de alta resolução e radares de ondas milimétricas. Esses dispositivos coletam continuamente dados de vídeo e sensores, que são então analisados usando visão computacional.
Em vez de apenas gravar filmagens, o sistema interpreta o que está acontecendo na estrada. Algoritmos de visão computacional detectam colisões de veículos, reconhecem violações de tráfego e até identificam pedestres ou movimentos incomuns perto das saídas das rodovias. Isso permite que as autoridades de trânsito respondam a incidentes em segundos, sem a necessidade de estarem fisicamente no local.
Os dados também alimentam um gêmeo digital: um modelo virtual 3D ao vivo da via expressa que mostra as condições de tráfego em tempo real, detalhes dos veículos e congestionamentos emergentes. Agentes de trânsito monitoram essa interface visual para gerenciar o fluxo, emitir alertas inteligentes e responder a incidentes de forma rápida e precisa.
Link to this sectionMobilidade autônoma possibilitada pela visão computacional na navegação#
A navegação hoje vai muito além de apenas ir do ponto A ao ponto B. Ela agora é uma parte crítica de sistemas inteligentes que movem pessoas, gerenciam mercadorias e tomam decisões em tempo real - seja na estrada ou dentro de armazéns.
No coração de muitos desses sistemas está a visão computacional, permitindo que as máquinas interpretem dados visuais e respondam instantaneamente ao seu entorno. Vamos percorrer alguns exemplos para ver como essa tecnologia está transformando a navegação em diferentes ambientes.
Link to this sectionRobôs de armazém navegando com visão computacional#
Robôs estão se tornando essenciais para o futuro da logística, especialmente em operações de armazém em larga escala. À medida que a demanda por e-commerce cresce, as empresas confiam cada vez mais em máquinas alimentadas por visão computacional para navegar em ambientes complexos, classificar itens e gerenciar o inventário com velocidade e precisão.
Veja, por exemplo, os centros de distribuição da Amazon, onde mais de 750.000 robôs trabalham ao lado de humanos para manter as operações funcionando de forma eficiente. Esses robôs dependem fortemente da visão computacional para navegar em armazéns movimentados, identificar itens e tomar decisões rápidas e precisas.
Um desses sistemas é o Sequoia, uma plataforma robótica projetada para acelerar o manuseio de inventário. Ele usa visão computacional avançada para escanear, contar e organizar produtos recebidos, ajudando a otimizar os processos de armazenamento e recuperação.
Da mesma forma, o Vulcan, um braço robótico, usa câmeras e análise de imagem para pegar itens com segurança nas prateleiras, ajustando sua aderência com base na forma e na posição de cada objeto e até reconhecendo quando a assistência humana é necessária. Enquanto isso, o Cardinal, outro robô habilitado por visão, é especializado em classificação: ele escaneia pilhas mistas de pacotes e os coloca precisamente nos carrinhos de saída corretos.

Fig 4. Cardinal levantando pacotes precisamente de uma pilha.
Link to this sectionVisão computacional na navegação de veículos autônomos#
Até agora, vimos como a visão computacional ajuda tanto pessoas quanto robôs a navegar em seus ambientes. Mas é igualmente crucial para sistemas autônomos, como carros autônomos, onde a navegação depende inteiramente do que o veículo consegue ver e entender em tempo real.
Um bom exemplo é o sistema Tesla Vision. A Tesla adotou uma abordagem apenas com câmeras para direção autônoma, removendo radares e outros sensores em favor de uma rede de câmeras que fornece uma visão completa de 360 graus do entorno do carro. Essas câmeras alimentam dados visuais no computador de direção autônoma total (FSD), que usa redes neurais profundas para interpretar o ambiente e tomar decisões de direção em frações de segundo.
Com base no que vê, o sistema decide quando dirigir, acelerar, frear ou mudar de faixa - exatamente como um motorista humano faria, mas inteiramente através de entrada visual. A Tesla melhora continuamente este sistema coletando e aprendendo com quantidades massivas de dados de direção do mundo real em toda a sua frota.

Fig 5. A Tesla usa visão computacional para uma navegação segura e autônoma (Fonte: Tesla).
Link to this sectionPrós e contras da visão computacional na navegação#
Aqui estão algumas vantagens principais do uso de visão computacional na navegação, especialmente em sistemas onde a precisão, a segurança e a tomada de decisão em tempo real são essenciais:
- Reduz o consumo de combustível: Ao ajudar os motoristas a evitar tráfego e rotas com muito anda-e-para, a visão computacional pode reduzir o consumo geral de combustível e o tempo de viagem, tornando os deslocamentos diários mais eficientes.
- Detecta desgaste de estradas e problemas de infraestrutura: Soluções baseadas em visão podem escanear buracos, marcações de faixa desbotadas, placas quebradas e infraestrutura danificada, fornecendo às equipes de manutenção dados confiáveis em tempo real.
- Integra-se perfeitamente com outras ferramentas de IA: A visão computacional pode ser combinada com assistentes de voz, modelos de previsão comportamental ou algoritmos de otimização de rota para criar uma experiência de navegação altamente inteligente e personalizada.
Embora a visão computacional traga muitos benefícios para a navegação, ela também apresenta algumas limitações importantes a serem consideradas ao implementar tais soluções. Aqui estão alguns desafios principais a ter em mente:
- Falta de generalização: Modelos treinados em ambientes ou cenários específicos frequentemente têm dificuldades quando implantados em contextos novos ou em mudança sem um novo treinamento.
- Limitações de iluminação: Sistemas de visão dependem de boa iluminação e tempo claro para funcionarem bem. Em neblina, chuva forte ou escuridão, seu desempenho cai, a menos que sejam combinados com sensores como LiDAR ou radar.
- Riscos de privacidade: Os sistemas de navegação que usam câmeras podem capturar pessoas e propriedades privadas sem consentimento. Isso levanta questões de privacidade que devem ser cuidadosamente tratadas durante o desenvolvimento e a implementação.
Link to this sectionPrincipais pontos#
A visão computacional está reinventando a navegação ao tornar os mapas mais dinâmicos, os sistemas de tráfego mais inteligentes e a mobilidade mais acessível. O que antes eram rotas estáticas agora são experiências interativas em tempo real - impulsionadas por visualizações 3D imersivas, direções guiadas por AR e tecnologias de transporte autônomo.
À medida que a tecnologia avança, é provável que o foco mude para tornar esses sistemas mais inclusivos, adaptáveis e responsáveis. O progresso contínuo dependerá da melhoria da precisão em diversos ambientes, da manutenção de um desempenho confiável e da proteção da privacidade do usuário. O futuro da visão computacional na navegação reside na construção de soluções que não sejam apenas inteligentes, mas também criteriosas em seu design e impacto.
Junte-se à nossa crescente comunidade! Explore nosso repositório GitHub para aprender sobre IA e confira nossas opções de licenciamento para iniciar seus projetos de visão por IA. Interessado em inovações como IA no varejo e visão computacional na agricultura? Visite nossas páginas de soluções para descobrir mais!






