Deteção de tráfego em vídeo à noite: Um olhar sobre o porquê da precisão ser fundamental
Desde a fraca visibilidade até ao encandeamento, aprende o que torna a precisão da deteção de tráfego em vídeo noturno um desafio, e como a visão computacional melhora a segurança e o fluxo.

As estradas parecem diferentes no escuro, não apenas para os motoristas, mas também para os sistemas responsáveis por mantê-las seguras. A visibilidade reduzida, o brilho dos faróis e reflexos rápidos podem tornar a detecção de veículos noturna mais desafiadora.
Métodos tradicionais, como observação manual ou câmeras baseadas em movimento, dependem principalmente do julgamento humano e de pistas simples de movimento. Isso pode ser pouco confiável em condições de baixa luminosidade ou tráfego complexo. Esses métodos podem identificar incorretamente veículos ou pedestres, levando a detecções falsas ou observações perdidas.

Fig 1. Um exemplo de uma estrada mal iluminada à noite (Fonte)
A inteligência artificial (IA), o aprendizado profundo (deep learning) e a visão computacional podem preencher essa lacuna ao automatizar a detecção e o reconhecimento de veículos. Em particular, a visão computacional é um ramo da IA que permite que máquinas vejam e interpretem dados visuais. Quando se trata de detecção de tráfego por vídeo à noite, os modelos de IA de visão podem ir além do brilho ou movimento, aprendendo a reconhecer padrões complexos que melhoram a precisão.
Por exemplo, modelos de visão computacional como o Ultralytics YOLO26 e o Ultralytics YOLO11 são conhecidos por sua velocidade e precisão. Eles podem processar dados de vídeo e imagem em tempo real, detectando e classificando múltiplos objetos dentro de um quadro e rastreando-os ao longo de sequências.
Essas capacidades são possíveis através de várias tarefas de visão, como detecção de objetos e segmentação de instâncias, mesmo quando faróis, sombras ou veículos sobrepostos tornam a detecção difícil. Eles permitem que o modelo identifique, classifique e diferencie objetos.
Neste artigo, exploraremos os desafios do monitoramento de tráfego noturno, veremos como a visão computacional os aborda e onde a IA de visão está sendo aplicada em sistemas de monitoramento de tráfego do mundo real. Vamos começar!
Link to this sectionDesafios na detecção noturna#
Antes de explorar como a visão computacional resolve os desafios da detecção de tráfego noturno, vamos analisar por que identificar veículos após o anoitecer é tão difícil. Aqui estão alguns fatores a considerar:
-
Baixa visibilidade: Iluminação limitada e condições de iluminação precárias dificultam a captura de imagens nítidas e detalhadas pelas câmeras. Com a qualidade de imagem reduzida, os veículos podem se misturar ao fundo ou serem identificados incorretamente.
-
Condições climáticas: Chuva, neblina, neblina ou até poeira podem degradar ainda mais a qualidade do vídeo. Essas condições tornam mais desafiador para os sistemas de detecção distinguir veículos de seus arredores.
-
Faróis e lanternas: Feixes brilhantes e reflexos podem sobrecarregar as câmeras. Isso pode criar detecções falsas de veículos, onde pontos de luz são confundidos com veículos, confundindo algoritmos de detecção e reduzindo a precisão.
-
Oclusão de veículos: Em condições de tráfego intenso, os veículos podem estar parcial ou totalmente ocultos atrás de outros. A oclusão complica o rastreamento, a contagem e a classificação de veículos, especialmente quando vários usuários da via se sobrepõem em um único quadro.
Link to this sectionA necessidade de conjuntos de dados (datasets) de referência e métricas noturnas#
Os modelos de visão computacional são treinados usando grandes coleções de imagens conhecidas como datasets. Esses datasets são cuidadosamente rotulados com os objetos que contêm, como carros, caminhões, pedestres e bicicletas, e servem como base para o treinamento. Ao estudar esses exemplos rotulados, o modelo aprende a reconhecer padrões, permitindo-lhe identificar e detectar objetos em novas filmagens.

Fig 2. Usando visão computacional para detectar veículos e pedestres no tráfego (Fonte)
Durante o treinamento, o modelo extrai características dos dados e as usa para melhorar a precisão da detecção. Esse processo ajuda a reduzir detecções perdidas e alarmes falsos quando o modelo é exposto a cenas de tráfego do mundo real.
Construir datasets ou coleções de dados para condições noturnas, no entanto, é muito mais desafiador. A baixa qualidade de vídeo torna a rotulagem demorada e propensa a erros. Além disso, eventos raros, mas importantes, como acidentes ou comportamento de condução incomum, podem ser difíceis de capturar em ambientes noturnos. Isso resulta em um número limitado de exemplos de treinamento para os modelos aprenderem.
Para resolver esse problema, pesquisadores desenvolveram datasets de referência especializados. Um dataset de referência é mais do que apenas uma coleção de imagens. Ele inclui rótulos padronizados, protocolos de avaliação e métricas de desempenho como precisão, recall e mean average precision (mAP). Essas métricas tornam possível testar e comparar diferentes algoritmos nas mesmas condições, garantindo uma avaliação justa e consistente.
Por exemplo, o dataset de referência ExDark contém 7.363 imagens de baixa luz em 12 categorias de objetos (bicicleta, barco, garrafa, ônibus, carro, gato, cadeira, xícara, cachorro, motocicleta, pessoas, mesa). Cada imagem é anotada com bounding boxes, e o dataset é amplamente utilizado em pesquisas para avaliar a detecção e classificação de objetos sob iluminação precária.
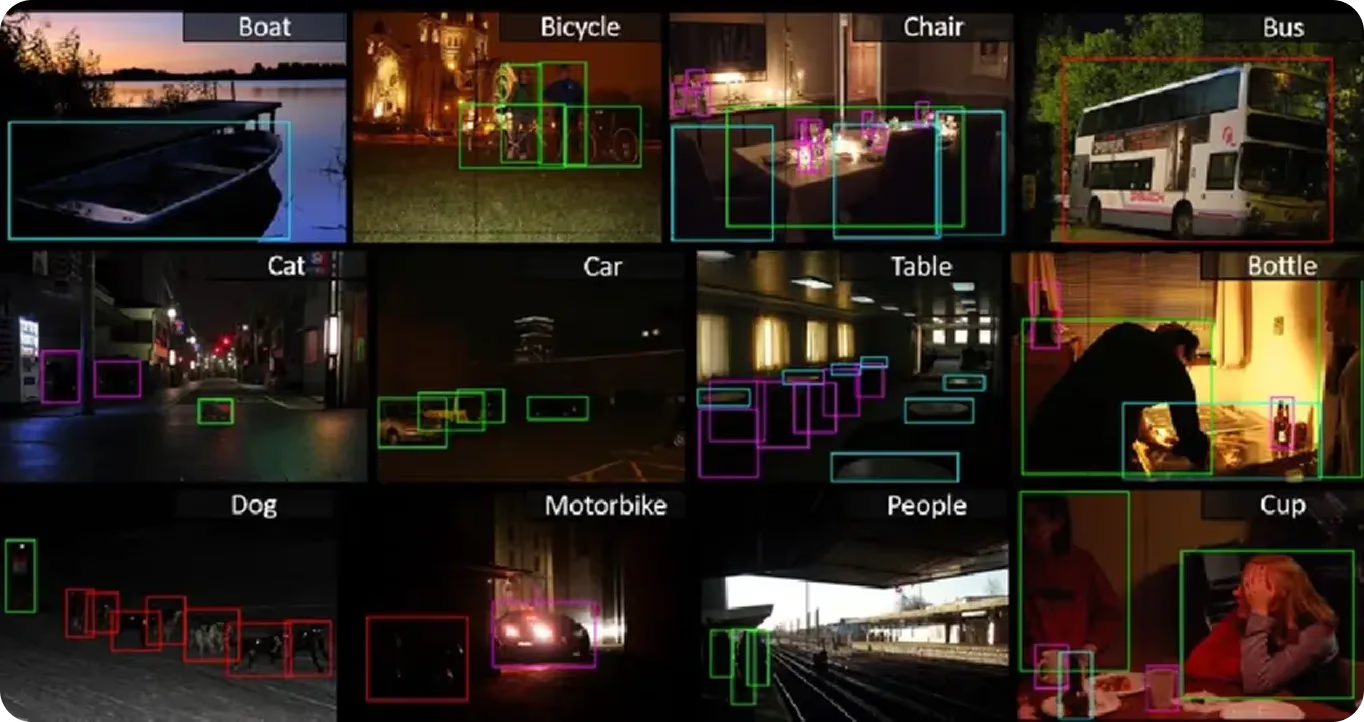
Fig 3. Um vislumbre do dataset ExDark (Fonte)
Da mesma forma, o dataset de referência NightOwls fornece cerca de 115.000 imagens noturnas com aproximadamente 279.000 anotações de pedestres. Tornou-se um recurso essencial para avaliar sistemas de detecção de pedestres, que desempenham um papel vital na segurança rodoviária e em sistemas avançados de assistência ao motorista (ADAS).
Link to this sectionComo a visão computacional ajuda na detecção de tráfego por vídeo à noite#
Agora que temos uma melhor compreensão dos desafios envolvidos e da necessidade de datasets, vamos dar uma olhada mais de perto em como os sistemas baseados em visão podem interpretar vídeos de tráfego noturno.
Modelos como o YOLO11 e o YOLO26 suportam tarefas de visão computacional, como detecção de objetos, rastreamento e segmentação de instâncias, que tornam possível analisar o tráfego mesmo em condições de baixa luminosidade. Aqui está uma visão geral das tarefas de IA de visão que esses modelos suportam para analisar o tráfego noturno:
- Detecção de objetos: Esta tarefa pode ser usada para identificar e localizar veículos, pedestres, bicicletas e outros usuários da via em cada quadro, geralmente desenhando bounding boxes ao redor deles.
- Rastreamento de objetos: Ajuda a seguir objetos detectados entre os quadros, permitindo que o mesmo veículo ou pedestre seja reconhecido ao longo do tempo, o que possibilita estimar a velocidade do veículo e monitorar o fluxo de tráfego.
- Segmentação de instâncias: Pode distinguir objetos individuais mesmo quando eles se sobrepõem, fornecendo detalhes em nível de pixel que melhoram a precisão em condições noturnas complexas.
- Classificação de imagem: Esta tarefa atribui uma imagem inteira ou um objeto detectado a uma categoria predefinida, como carro, ônibus, caminhão ou motocicleta.
- Detecção de caixa delimitadora orientada (OBB): Captura o ângulo e a orientação exatos de um objeto, melhorando a precisão quando os veículos aparecem na diagonal ou em posições incomuns no tráfego noturno.
Link to this sectionUsando modelos Ultralytics YOLO para monitoramento noturno#
Discutimos o treinamento de modelos, a necessidade de datasets e as tarefas que modelos como o YOLO11 e o YOLO26 suportam. Mas para juntar tudo isso, há mais um conceito a ser abordado: como esses modelos são realmente aplicados ao monitoramento noturno.
Prontos para uso, os modelos Ultralytics YOLO estão disponíveis como versões pré-treinadas, o que significa que já foram treinados em grandes datasets de uso geral, como o dataset COCO, que cobre muitos objetos do cotidiano. Isso dá ao modelo uma forte capacidade base para detectar e classificar objetos.
No entanto, como esses datasets contêm poucos exemplos de baixa luz ou noturnos, os modelos pré-treinados não são muito bons em lidar com brilho, sombras ou baixo contraste de forma eficaz. Para torná-los impactantes para a detecção de tráfego por vídeo à noite, eles precisam ser ajustados (fine-tuned) em datasets especializados que reflitam as condições noturnas do mundo real.
O ajuste fino ou treinamento personalizado envolve treinar o modelo em imagens rotuladas adicionais capturadas em condições de baixa luz, como veículos sob brilho de farol, pedestres em faixas de pedestres ou cruzamentos movimentados à noite, para que ele aprenda as características únicas das cenas noturnas.
Uma vez treinado de forma personalizada, o modelo pode suportar tarefas como detecção, rastreamento, segmentação ou classificação com muito mais precisão em condições de baixa luminosidade. Isso permite que as autoridades de trânsito apliquem tais modelos para casos de uso práticos, como contagem de veículos, estimativa de velocidade, controle adaptativo de sinal e prevenção de acidentes à noite.
Link to this sectionAplicações de IA de visão para detecção de tráfego por vídeo à noite#
A seguir, vejamos como a visão computacional pode ser adotada em sistemas de tráfego noturno do mundo real.
Link to this sectionSinais de trânsito inteligentes podem apoiar o planejamento de cidades inteligentes#
Os cruzamentos urbanos são algumas das áreas mais difíceis de gerenciar, especialmente à noite, quando a visibilidade cai e o fluxo de tráfego se torna menos previsível. Os sinais tradicionais dependem de temporizadores fixos que não conseguem responder a mudanças em tempo real. Pesquisas mostram que isso não apenas desperdiça o tempo dos motoristas, mas também leva a consumo de combustível e atrasos desnecessários.
É exatamente aí que os sistemas de visão computacional podem ajudar a superar esse desafio. Esses sistemas podem monitorar os movimentos dos veículos e detectar o número de veículos em tempo real. Os dados são então alimentados em sistemas de controle de tráfego adaptativos. Isso permite que os sinais se ajustem rapidamente em resposta às condições reais da estrada. Assim, se uma faixa está congestionada enquanto outra está vazia, o tempo do sinal pode ser ajustado instantaneamente para eliminar gargalos.
Link to this sectionPrevenção de acidentes#
Dirigir à noite é mais arriscado do que durante o dia porque a visibilidade reduzida, a iluminação irregular e o brilho dificultam que os motoristas julguem as distâncias. De fato, estudos mostram que a taxa de acidentes fatais por quilômetro à noite pode ser até três vezes maior do que durante o dia.
Métodos de monitoramento convencionais, como câmeras de vigilância fixas, patrulhas rodoviárias, sensores de presença de veículos e sistemas de sinalização de tempo fixo, operam de forma reativa e podem falhar em detectar situações perigosas cedo o suficiente para evitar que ocorram.
As soluções de visão computacional podem lidar com essa preocupação analisando fluxos de vídeo ao vivo e detectando padrões incomuns na estrada ou rodovia. Usando o rastreamento de objetos, esses sistemas podem monitorar o comportamento do veículo em tempo real e emitir alertas quando algo parece anormal.
Por exemplo, se um veículo em movimento estiver mudando de faixa, se movendo muito rápido em uma área congestionada ou desacelerando repentinamente, o sistema pode sinalizá-lo em tempo real. Isso significa que as autoridades podem responder rapidamente e evitar acidentes antes que aconteçam.
Link to this sectionDireção autônoma e ADAS#
Para veículos autônomos e ADAS, a condução noturna traz seus próprios desafios. A baixa visibilidade e os padrões de tráfego imprevisíveis dificultam o desempenho confiável dos sensores tradicionais, o que gera preocupações de segurança.
A visão computacional aprimora esses sistemas ao lidar com tarefas como detecção de objetos, rastreamento de faixa e segmentação, permitindo que os veículos reconheçam pedestres, outros carros e obstáculos mesmo em condições de iluminação precárias. Quando combinada com radar ou LiDAR (Light Detection and Ranging), que mapeiam os arredores em 3D, a camada visual adicional ajuda o ADAS a fornecer avisos antecipados e dá aos veículos autônomos a consciência de que precisam para navegar com mais segurança à noite.

Fig 4. Filmagem de veículo capturada em condições diurnas e noturnas (Fonte)
Link to this sectionAplicação da lei e detecção de violações#
O excesso de velocidade é responsável por uma em cada três fatalidades no trânsito em todo o mundo, e o risco só piora à noite. A escuridão torna mais difícil para a polícia de trânsito capturar violações, já que detalhes que são claros durante o dia geralmente ficam borrados após o anoitecer.
É por isso que infrações como excesso de velocidade em estradas vazias, passar sinais vermelhos ou desviar para a faixa errada muitas vezes ficam impunes. A visão computacional resolve esse problema usando câmeras infravermelhas para detectar violações mesmo em condições de baixa luz. Esses sistemas criam zonas de detecção onde os incidentes são registrados, reduzindo falsos positivos e fornecendo evidências claras e verificáveis. Para as autoridades de transporte, isso significa menos pontos cegos e menos dependência de verificações manuais.
Link to this sectionPrós e contras da detecção de tráfego por vídeo noturno#
Aqui estão algumas vantagens de usar IA de visão para detecção de tráfego por vídeo à noite.
- Escalabilidade: Uma vez ajustados, os modelos podem ser implantados em muitas câmeras ou cruzamentos, suportando o monitoramento de toda a cidade.
- Análise preditiva: Dados de vídeo históricos podem ser usados para prever congestionamentos e zonas propensas a acidentes, apoiando medidas preventivas.
- Otimização de recursos: Fornece às autoridades insights em tempo real que ajudam a alocar patrulhas rodoviárias e serviços de emergência de forma mais eficiente.
Apesar de seus benefícios, a detecção de tráfego noturno usando IA de visão também apresenta certas limitações. Aqui estão alguns fatores a serem considerados:
-
Dependência de dados: A precisão dos sistemas de IA de visão depende muito do acesso a datasets de alta qualidade que capturem uma ampla gama de condições noturnas.
-
Desafios ambientais: Fatores climáticos como chuva, neblina ou neblina, bem como problemas práticos como lentes de câmera sujas ou desalinhadas, podem reduzir o desempenho da detecção e exigir manutenção regular.
-
Requisitos de hardware: Executar modelos avançados de IA geralmente exige GPUs de alto desempenho ou dispositivos de borda especializados, o que pode tornar a implantação em grande escala cara e complexa.
Link to this sectionO caminho a seguir para sistemas de transporte inteligentes à noite#
À medida que as cidades crescem e as estradas ficam mais movimentadas, a detecção de tráfego noturno está caminhando para sistemas mais inteligentes e responsivos. Por exemplo, câmeras térmicas e sensores infravermelhos podem detectar assinaturas de calor de pessoas e veículos, tornando possível ver mesmo na escuridão total. Isso reduz erros que ocorrem quando as câmeras padrão lutam contra o brilho ou a baixa luz.

Fig 5. A tecnologia de visão noturna aprimora a detecção de pedestres à noite (Fonte)
Outra abordagem crescente é a fusão câmera-LiDAR. As câmeras fornecem imagens detalhadas da estrada, enquanto o LiDAR gera um mapa 3D preciso. Usados juntos, eles melhoram a precisão da detecção de faixas, veículos e obstáculos, particularmente em condições de baixa luz ou neblina moderada.
Ao mesmo tempo, os avanços no aprimoramento de imagens de baixa luz, reconhecimento de pedestres e identificação de placas de veículos estão expandindo as capacidades da visão computacional. Com essas melhorias, até mesmo estradas e cruzamentos mal iluminados podem ser monitorados com maior confiabilidade e menos erros.
Link to this sectionPrincipais pontos#
Detectar veículos à noite sempre foi um desafio para o monitoramento de tráfego, mas a visão computacional está tornando isso mais gerenciável. Ao reduzir o impacto do brilho e lidar com cenas de tráfego complexas, ela fornece uma imagem mais precisa de como as estradas se comportam após o anoitecer. À medida que esses sistemas continuam a avançar, eles estão abrindo caminho para um transporte noturno mais seguro, inteligente e eficiente.
Pronto para integrar a IA de visão aos seus projetos? Junte-se à nossa comunidade ativa e descubra inovações como a IA no setor automotivo e IA de visão em robótica. Visite nosso repositório no GitHub para descobrir mais. Para começar com a visão computacional hoje, confira nossas opções de licenciamento.






