Изучение компьютерного зрения в навигационных приложениях
Узнай, как компьютерное зрение в навигационных решениях улучшает картографирование в реальном времени, распознавание объектов и дополненную реальность для более «умных» и безопасных путешествий.

Сегодня достать телефон, ввести пункт назначения и следовать пошаговым инструкциям кажется чем-то совершенно обыденным. Это занимает всего пару секунд. Но такое повседневное удобство — результат многолетних технологических достижений. Навигация прошла долгий путь: от бумажных карт и компасов до интеллектуальных систем, способных понимать окружающий мир и реагировать на него в режиме реального времени.
Одной из технологий, стоящих за этим сдвигом, является компьютерное зрение — раздел искусственного интеллекта (ИИ), который позволяет машинам интерпретировать визуальную информацию подобно тому, как это делают люди. Современные навигационные инструменты теперь используют изображения в реальном времени со спутников, видеорегистраторов и датчиков на уровне улиц, чтобы повысить точность карт, контролировать дорожную обстановку и направлять пользователей в сложных условиях.
В этой статье мы рассмотрим, как компьютерное зрение улучшает навигацию, совершенствуя GPS-карты, предоставляя актуальную информацию о дорожном движении и поддерживая такие технологии, как навигация с дополненной реальностью и автономные транспортные средства.
Link to this sectionИИ-системы навигации с иммерсивным 3D-картографированием#
Использование инструментов вроде Google Maps для повседневной навигации стало привычным делом, будь то поездка через весь город или поиск ближайшего кафе. По мере широкого распространения технологий ИИ мы видим всё более продвинутые функции, такие как Immersive View, представленный компанией Google Maps в 2023 году. Он позволяет пользователям просматривать части своего маршрута в 3D-среде. Это стало возможным благодаря сочетанию ИИ, фотограмметрии и компьютерного зрения.
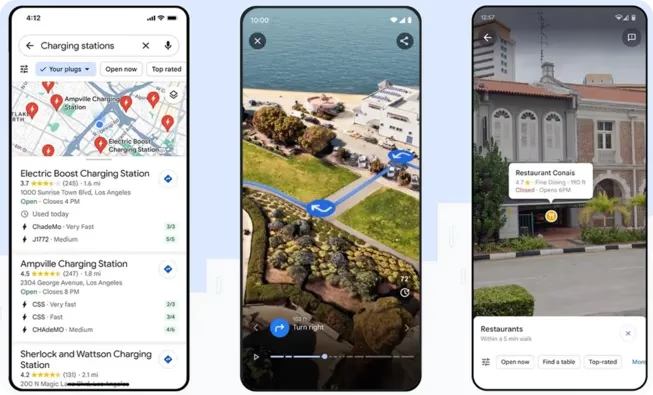
Рис. 1. Immersive View в Google Maps.
Всё начинается с миллиардов изображений высокого разрешения, полученных с помощью разнообразного специализированного оборудования. К нему относятся автомобили Street View, оснащенные камерами с обзором 360 градусов, которые ездят по городам, и устройства Trekker — носимые рюкзаки с закрепленными камерами, предназначенные для съемки в местах, куда не проедет автомобиль, например, на туристических тропах или в узких переулках.
Эти изображения совмещаются с данными карт с помощью фотограмметрии — метода, который объединяет 2D-фотографии, снятые под разными углами, для создания точных 3D-моделей улиц, зданий и рельефа.
Затем компьютерное зрение используется для анализа этих моделей с помощью обнаружения объектов и сегментации изображений, чтобы распознавать и помечать важные элементы: дорожные знаки, тротуары, пешеходные переходы и входы в здания.

Рис. 2. Immersive View использует сегментацию для выделения объектов на улице.
Размеченные данные используются для обучения ИИ-систем, которые понимают, как визуальные маркеры различаются в разных регионах. Например, система легко отличит знак «SLOW» в США, который обычно представляет собой желтый или оранжевый ромб, от аналогичного знака в Японии, который чаще всего выглядит как красно-белый треугольник. Такой уровень понимания делает навигацию более точной и учитывающей культурные особенности.
Наконец, Immersive View накладывает текущие маршруты навигации на 3D-среду, предлагая плавный и интуитивно понятный интерфейс, который точно показывает, куда тебе нужно двигаться.
Link to this sectionДополненная реальность в навигационных решениях#
Наверняка ты не раз крутился на месте, пытаясь понять, в какую сторону указывает Google Maps. Именно эту проблему призвана решить навигация с использованием дополненной реальности (AR) — технологии, которая накладывает цифровую информацию на изображение с камеры в реальном мире. Она меняет то, как люди ориентируются в оживленных местах, будь то городские улицы или большие крытые пространства.
Обычным картам бывает сложно следовать, особенно если сигнал GPS слабый или работает нестабильно. AR-навигация решает это, отображая цифровые подсказки, стрелки и подписи прямо на изображении с камеры в реальном времени. Это означает, что пользователь видит указания, которые соответствуют реальным улицам и зданиям, что значительно упрощает поиск верного пути.
Link to this sectionКак дополненная реальность используется в навигации#
AR-навигация опирается на модели компьютерного зрения, чтобы понимать окружающую среду через камеру устройства. Это включает в себя различные задачи, такие как локализация изображения, которая находит характерные черты (например, края зданий или дорожные знаки) и сопоставляет их с сохраненной картой. Метод одновременной локализации и построения карты (SLAM) создает карту окружения, одновременно отслеживая положение устройства в реальном времени.
Например, аэропорт Цюриха первым внедрил функцию Live View от Google Maps для навигации внутри помещений. Пассажиры могут использовать камеру своего телефона, чтобы видеть стрелки и указатели, наложенные на реальную среду, что помогает им перемещаться по терминалам к выходам на посадку, магазинам и услугам. Это улучшает впечатления пассажиров, упрощая навигацию в сложных пространствах.

Рис. 3. Аэропорт Цюриха использует компьютерное зрение и AR для навигации пассажиров.
Link to this sectionПовышение безопасности дорожного движения с помощью ИИ-навигации#
Городские улицы с каждым днем становятся всё более загруженными. Из-за увеличивающегося количества машин, толп пешеходов и постоянной активности обеспечение плавного и безопасного движения становится всё более сложной задачей. Чтобы помочь справиться с этим хаосом, многие города переходят на ИИ и компьютерное зрение.
Умные камеры и датчики, установленные на перекрестках и вдоль дорог, захватывают постоянный поток визуальных данных. Эти данные обрабатываются в режиме реального времени для обнаружения аварий, контроля трафика, выявления выбоин и фиксации нарушений, таких как незаконная парковка или опасное поведение пешеходов.
Интересный пример — Smart Airport Expressway в Ханчжоу, Китай. Эта 20-километровая трасса, соединяющая центр Ханчжоу с международным аэропортом Сяошань, была модернизирована с помощью камер высокого разрешения и миллиметровых радаров. Эти устройства непрерывно собирают видео и данные с датчиков, которые затем анализируются с помощью компьютерного зрения.
Система не просто записывает видео, а интерпретирует происходящее на дороге. Алгоритмы компьютерного зрения обнаруживают столкновения транспортных средств, распознают нарушения правил дорожного движения и даже идентифицируют пешеходов или необычные перемещения рядом с выездами с шоссе. Это позволяет дорожным службам реагировать на инциденты за считанные секунды без необходимости физического присутствия на месте.
Данные также поступают в цифровой двойник — живую 3D-модель шоссе, которая показывает текущую дорожную обстановку, детали транспортных средств и возникающие заторы. Дорожные инспекторы отслеживают этот визуальный интерфейс, чтобы управлять потоком, отправлять умные оповещения и оперативно реагировать на происшествия.
Link to this sectionАвтономная мобильность благодаря компьютерному зрению в навигации#
Сегодня навигация выходит далеко за рамки перемещения из точки А в точку Б. Это критически важная часть интеллектуальных систем, которые перевозят людей, управляют товарами и принимают решения в реальном времени — будь то на дорогах или на складах.
В основе многих таких систем лежит компьютерное зрение, позволяющее машинам интерпретировать визуальные данные и мгновенно реагировать на окружающую обстановку. Давай рассмотрим несколько примеров, чтобы увидеть, как эта технология трансформирует навигацию в различных средах.
Link to this sectionСкладские роботы, использующие компьютерное зрение для навигации#
Роботы становятся неотъемлемой частью будущего логистики, особенно в масштабных складских операциях. По мере роста спроса на электронную коммерцию компании всё чаще полагаются на машины с компьютерным зрением, чтобы перемещаться в сложных пространствах, сортировать товары и управлять запасами с высокой скоростью и точностью.
Возьмем, к примеру, центры исполнения заказов Amazon, где более 750 000 роботов работают вместе с людьми для обеспечения эффективности процессов. Эти роботы активно используют компьютерное зрение для передвижения по оживленным складским помещениям, идентификации предметов и принятия быстрых и точных решений.
Одной из таких систем является Sequoia — роботизированная платформа, созданная для ускорения обработки товаров. Она использует продвинутое компьютерное зрение для сканирования, подсчета и организации поступающих продуктов, помогая оптимизировать процессы хранения и поиска.
Аналогично, манипулятор Vulcan использует камеры и анализ изображений, чтобы аккуратно снимать предметы с полок, корректируя захват в зависимости от формы и положения каждого объекта, а также распознавая моменты, когда требуется помощь человека. Тем временем Cardinal, другой робот со зрением, специализируется на сортировке: он сканирует смешанные груды посылок и точно помещает их в нужные тележки для отправки.

Рис. 4. Cardinal аккуратно поднимает посылки из груды.
Link to this sectionКомпьютерное зрение в навигации автономных транспортных средств#
Мы уже увидели, как компьютерное зрение помогает людям и роботам ориентироваться. Но оно не менее важно для автономных систем, таких как беспилотные автомобили, где навигация полностью зависит от того, что автомобиль может увидеть и распознать в режиме реального времени.
Хорошим примером является Tesla Vision system. Tesla перешла на подход, основанный исключительно на камерах, отказавшись от радаров и других датчиков в пользу сети камер, которые обеспечивают полный 360-градусный обзор пространства вокруг машины. Эти камеры передают визуальные данные в компьютер Full Self-Driving (FSD), который использует глубокие нейронные сети для интерпретации среды и принятия решений на дороге за доли секунды.
На основе увиденного система решает, когда нужно повернуть, ускориться, затормозить или сменить полосу — совсем как водитель-человек, но исключительно на основе визуального ввода. Tesla постоянно улучшает эту систему, собирая и обучаясь на огромных объемах реальных данных вождения, полученных от своего парка автомобилей.

Рис. 5. Tesla использует компьютерное зрение для безопасной и автономной навигации (Источник: Tesla).
Link to this sectionПлюсы и минусы компьютерного зрения в навигации#
Вот несколько ключевых преимуществ использования компьютерного зрения в навигации, особенно в системах, где важны точность, безопасность и принятие решений в реальном времени:
- Снижает расход топлива: Помогая водителям избегать пробок и маршрутов с частыми остановками, компьютерное зрение может сократить общий расход топлива и время в пути, делая повседневные поездки эффективнее.
- Обнаруживает износ дорог и проблемы с инфраструктурой: Решения на базе компьютерного зрения могут сканировать дорогу на наличие ям, стершейся разметки, сломанных знаков и поврежденной инфраструктуры, предоставляя дорожным службам достоверные данные в реальном времени.
- Легко интегрируется с другими ИИ-инструментами: Компьютерное зрение можно объединить с голосовыми помощниками, моделями прогнозирования поведения или алгоритмами оптимизации маршрутов для создания высокоинтеллектуального и персонализированного навигационного опыта.
Несмотря на то, что компьютерное зрение приносит много пользы в навигацию, у него есть несколько важных ограничений, которые стоит учитывать при внедрении таких решений. Вот несколько ключевых проблем, о которых стоит помнить:
- Недостаточная универсальность: Модели, обученные на конкретных условиях или сценариях, часто испытывают трудности при использовании в новых или меняющихся контекстах без переобучения.
- Ограничения освещенности: Системы технического зрения зависят от хорошего освещения и ясной погоды. В условиях тумана, проливного дождя или темноты их производительность падает, если они не сочетаются с датчиками вроде LiDAR или радара.
- Риски конфиденциальности: Навигационные системы, использующие камеры, могут снимать людей и частную собственность без их согласия. Это порождает вопросы конфиденциальности, которые должны тщательно прорабатываться на этапах разработки и внедрения.
Link to this sectionОсновные выводы#
Компьютерное зрение переосмысливает навигацию, делая карты более динамичными, системы дорожного движения — умнее, а мобильность — доступнее. То, что раньше было статичными маршрутами, теперь стало интерактивным опытом в реальном времени, подкрепленным иммерсивными 3D-превью, AR-подсказками и технологиями автономного транспорта.
По мере развития технологий фокус, вероятно, сместится в сторону создания более инклюзивных, адаптивных и ответственных систем. Дальнейший прогресс будет зависеть от повышения точности в разнообразных условиях, поддержания надежной работы и защиты конфиденциальности пользователей. Будущее компьютерного зрения в навигации заключается в создании решений, которые не только интеллектуальны, но и продуманны с точки зрения их дизайна и влияния.
Присоединяйся к нашему растущему сообществу! Изучи наш репозиторий на GitHub, чтобы узнать больше об ИИ, и ознакомься с нашими вариантами лицензирования, чтобы начать свои проекты в области визуального ИИ. Тебя интересуют такие инновации, как ИИ в ритейле и компьютерное зрение в сельском хозяйстве? Посети наши страницы решений, чтобы узнать больше!






