تعزيز إعادة تحديد هوية المركبات باستخدام نماذج Ultralytics YOLO
تعرف على كيفية دور نماذج Ultralytics YOLO في حلول إعادة تحديد هوية المركبات من خلال توفير كشف دقيق وموثوق.

عند مشاهدة سباق فورمولا 1، من السهل تمييز سيارة فريقك المفضل. فاللون الأحمر الزاهي لسيارة فيراري أو اللون الفضي لسيارة مرسيدس يبرز بوضوح لفة بعد لفة.
إن طلب القيام بالأمر نفسه من آلة، ليس على حلبة سباق منظمة بل في شوارع المدينة المزدحمة بحركة المرور، يمثل تحدياً أكبر بكثير. ولهذا السبب اكتسبت إعادة تحديد هوية المركبات (vehicle re-ID) اهتماماً واسعاً في مجال الذكاء الاصطناعي مؤخراً.
تمنح عملية إعادة تحديد هوية المركبات الآلات القدرة على التعرف على نفس المركبة عبر كاميرات متعددة الزوايا أو غير متداخلة. كما تهدف أيضاً إلى تحديد المركبات بعد تعرضها لحجب مؤقت (عندما تكون المركبة مخفية جزئياً) أو تغيرات في الإضاءة وزوايا الرؤية.
إحدى التقنيات الأساسية التي تشغل إعادة تحديد هوية المركبات هي الرؤية الحاسوبية. الرؤية الحاسوبية هي مجال فرعي من الذكاء الاصطناعي يركز على تعليم الآلات فهم وتفسير المعلومات البصرية، مثل الصور ومقاطع الفيديو. باستخدام هذه التقنية، يمكن لأنظمة الذكاء الاصطناعي تحليل ميزات المركبة وتتبعها بشكل موثوق عبر شبكات كاميرات واسعة لتطبيقات مثل المراقبة الحضرية ومراقبة حركة المرور.
على وجه الخصوص، تدعم نماذج الرؤية بالذكاء الاصطناعي مثل Ultralytics YOLO11 والنموذج القادم Ultralytics YOLO26 مهاماً مثل اكتشاف الأشياء وتتبعها. يمكن لهذه النماذج تحديد موقع المركبات بسرعة في كل إطار ومتابعة حركتها عبر المشهد. وعند دمج هذه النماذج مع شبكات إعادة تحديد هوية المركبات، يمكن للنظام المشترك التعرف على نفس المركبة عبر تغذيات كاميرات مختلفة، حتى عند تغير الزوايا أو ظروف الإضاءة.
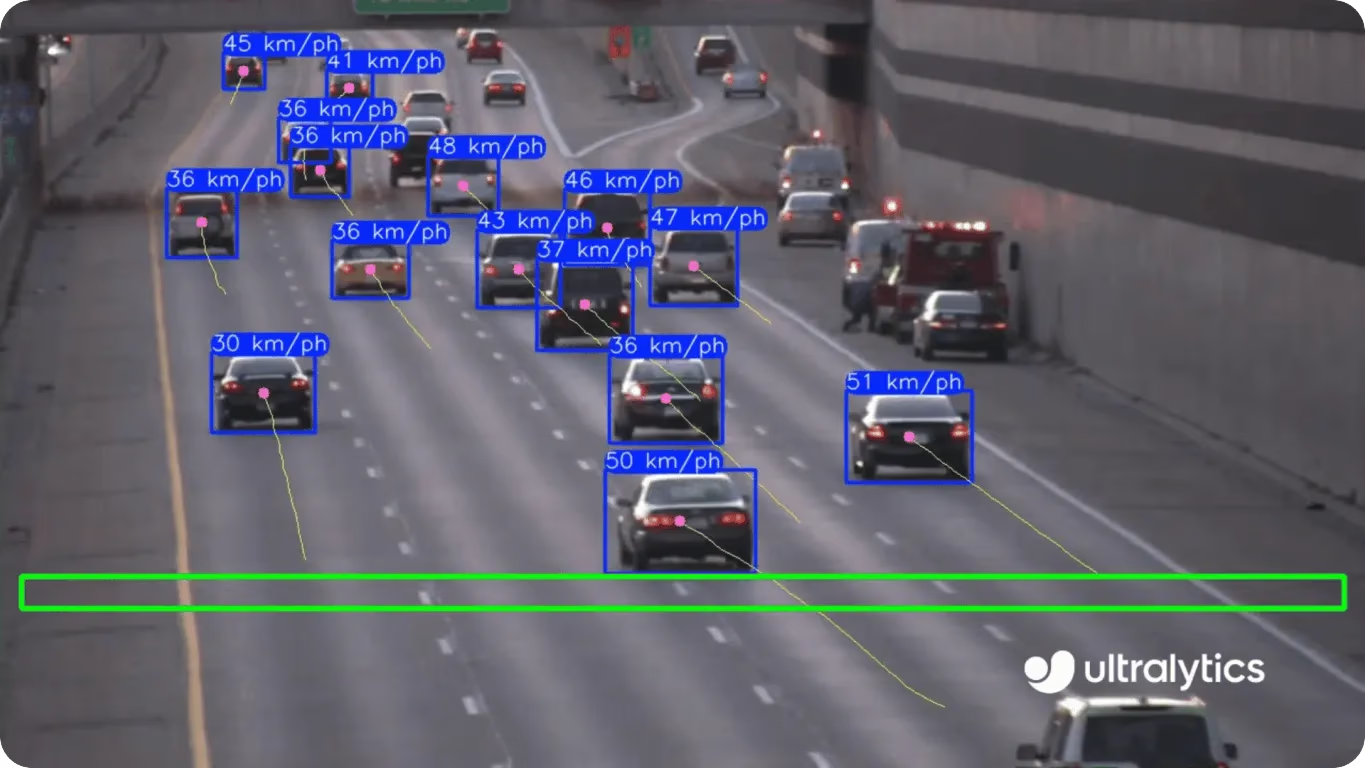
شكل 1. مثال على استخدام YOLO11 لتتبع المركبات وتقدير السرعة (المصدر)
في هذه المقالة، نلقي نظرة على كيفية عمل إعادة تحديد هوية المركبات، والتقنية التي تجعل ذلك ممكناً، وأماكن استخدامها في أنظمة النقل الذكية. لنبدأ!
Link to this sectionما هي إعادة تحديد هوية المركبات؟#
إعادة تحديد هوية المركبات هي تطبيق مهم في الرؤية الحاسوبية. وهي تركز على التعرف على نفس المركبة أثناء ظهورها عبر كاميرات مختلفة غير متداخلة، مع الحفاظ على ثبات هويتها أثناء تحركها عبر المدينة. يمثل هذا تحدياً لأن كل كاميرا قد تلتقط المركبة من زاوية مختلفة، أو تحت إضاءة مختلفة، أو مع حجب جزئي.
تخيل سيناريو تمر فيه سيارة سيدان زرقاء عبر تقاطع ثم تظهر لاحقاً في شارع آخر، حيث تراقبها كاميرا أخرى. لقد تغيرت الزاوية والإضاءة والخلفية، وقد تحجب سيارات أخرى الرؤية لفترة وجيزة. على الرغم من ذلك، لا يزال نظام إعادة تحديد هوية المركبات بحاجة إلى تحديد أنها نفس المركبة.
جعلت التطورات الأخيرة في التعلم العميق، خاصة مع الشبكات العصبية التلافيفية (CNNs) والنماذج القائمة على المحولات (Transformers)، هذه العملية أكثر دقة بكثير. يمكن لهذه النماذج استخراج أنماط بصرية ذات مغزى والتمييز بين المركبات المتشابهة مع الاستمرار في تحديد المركبة الصحيحة.
في أنظمة النقل الذكية، تدعم هذه القدرة المراقبة المستمرة، وإعادة بناء المسار، وتحليل حركة المرور على مستوى المدينة، مما يمنح أنظمة المدن الذكية صورة أوضح لكيفية تحرك المركبات. وهي تساعد في تحسين السلامة والكفاءة.
Link to this sectionفهم كيفية عمل إعادة تحديد هوية المركبات#
عادةً، يتم تحليل لقطات الفيديو من التقاطعات ومناطق وقوف السيارات والطرق السريعة باستخدام تقنيات إعادة تحديد هوية المركبات لتحديد ما إذا كانت نفس المركبة تظهر عبر كاميرات مختلفة. يشبه هذا المفهوم إعادة تحديد هوية الأشخاص، حيث تتبع الأنظمة الأفراد عبر وجهات نظر متعددة، ولكن هنا ينصب التركيز على تحليل الميزات الخاصة بالمركبة بدلاً من المظهر البشري.
تتضمن عملية القيام بذلك عدة خطوات رئيسية، صُممت كل منها لمساعدة النظام على اكتشاف المركبات، واستخراج ميزاتها البصرية، ومطابقتها بشكل موثوق عبر وجهات نظر مختلفة.
على مستوى عالٍ، يقوم النظام أولاً باكتشاف المركبات في كل إطار ثم يستخرج ميزات مثل اللون والشكل والملمس لإنشاء تمثيل رقمي فريد، أو تضمين (embedding)، لكل مركبة. تتم مقارنة هذه التضمينات عبر الزمن وعبر الكاميرات، مدعومة غالباً بتتبع الأشياء والفحوصات المكانية والزمانية، لتقرر ما إذا كانت رؤيتان تنتميان إلى نفس المركبة.
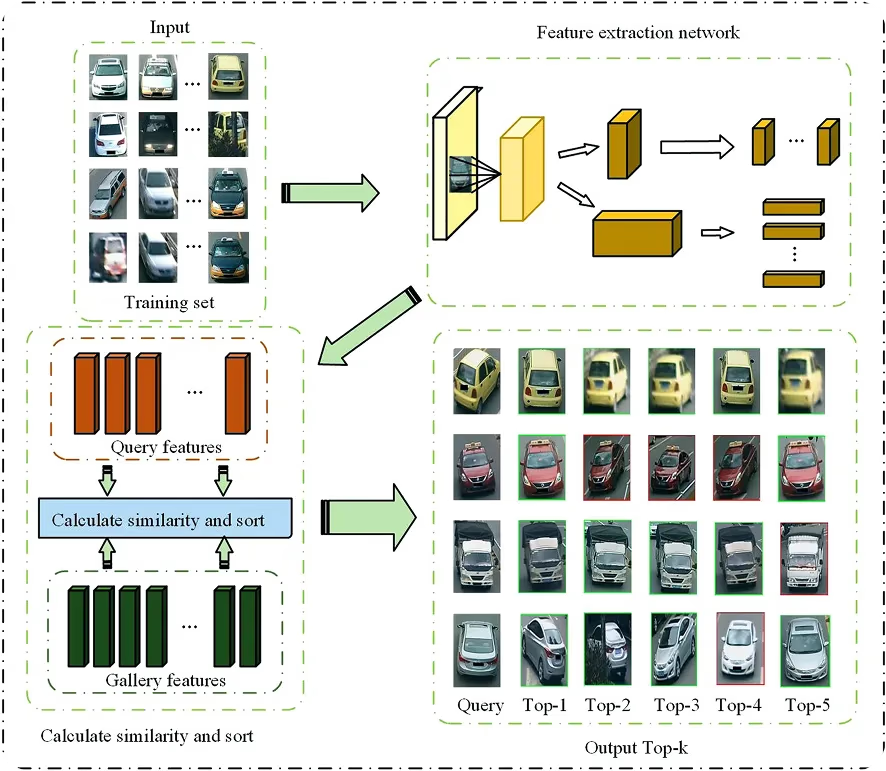
شكل 2. كيفية عمل إعادة تحديد هوية المركبات. (المصدر)
إليك نظرة فاحصة على هذه العملية:
- اكتشاف الأشياء: يحدد النظام أولاً المركبات ويحدد مواقعها داخل كل إطار فيديو، حتى يعرف بالضبط المناطق التي يجب معالجتها. يتم التعامل مع هذه الخطوة عادةً بواسطة نماذج اكتشاف الأشياء.
- استخراج الميزات: بعد الاكتشاف، تقوم شبكة مخصصة لإعادة تحديد الهوية أو استخراج الميزات بتحليل كل لقطة للمركبة وتوليد خرائط ميزات أو تمثيلات ميزات تلتقط تفاصيل بصرية مثل اللون والشكل والملمس والأجزاء المميزة.
- توليد التضمين (Embedding): يتم تحويل هذه الميزات المستخرجة إلى تمثيل رقمي يسمى تضمين الميزات. يعمل هذا التضمين مثل بصمة رقمية تلتقط كيفية ظهور المركبة من زوايا مختلفة. قبل المطابقة، يتم عادةً تطبيع هذه التضمينات بحيث لا تتداخل الاختلافات الناتجة عن الإضاءة أو التباين أو إعدادات الكاميرا مع مقارنة الهوية. يضمن التطبيع أن يركز النظام على الميزات ذات المغزى المتعلقة بالهوية بدلاً من الضوضاء.
- تتبع الأشياء: ضمن عرض كاميرا واحدة، تربط خوارزميات التتبع الاكتشافات عبر الإطارات، مما يساعد في الحفاظ على هوية ثابتة أثناء تحرك المركبة عبر المشهد.
- المطابقة عبر الكاميرات: لمطابقة نفس المركبة عبر كاميرات مختلفة، يقارن النظام التضمينات (التي تم إنشاؤها بواسطة شبكة إعادة تحديد الهوية) إلى جانب معلومات التوقيت والموقع. تحدد هذه الخطوة ما إذا كانت رؤيتان تنتميان إلى نفس المركبة، حتى عندما لا تتداخل الكاميرات.
Link to this sectionكيف يمكن لنماذج Ultralytics YOLO دعم إعادة تحديد هوية المركبات#
تلعب نماذج Ultralytics YOLO دوراً داعماً مهماً في خطوط أنابيب إعادة تحديد هوية المركبات. وبينما لا تقوم بإعادة تحديد الهوية بمفردها، فإنها توفر قدرات أساسية أخرى، مثل الاكتشاف السريع والتتبع المستقر، التي تعتمد عليها شبكات إعادة تحديد الهوية للمطابقة الدقيقة عبر الكاميرات.
بعد ذلك، دعونا نلقي نظرة فاحصة على كيفية تعزيز نماذج Ultralytics YOLO مثل YOLO11 لأنظمة إعادة تحديد هوية المركبات.
Link to this sectionوحدة دقيقة لاكتشاف المركبات: الجزء الأول من أنظمة إعادة تحديد الهوية#
أساس أي نظام لإعادة تحديد هوية المركبات هو الاكتشاف الدقيق للأشياء. تعد نماذج Ultralytics YOLO مثل YOLO11 خياراً رائعاً لهذا، حيث يمكنها اكتشاف المركبات بسرعة في كل إطار، حتى في المشاهد المزدحمة التي تعاني من حجب جزئي، أو حركة مرور كثيفة، أو ظروف إضاءة متغيرة.
يمكن أيضاً تدريبها بشكل مخصص، مما يعني أنه يمكنك ضبط النموذج على مجموعة بياناتك الخاصة ليتعلم التعرف على أنواع معينة من المركبات، مثل سيارات الأجرة، أو شاحنات التوصيل، أو مركبات الأسطول. هذا مفيد بشكل خاص عندما يتطلب الحل اكتشافاً أكثر تخصصاً. من خلال توفير صناديق محيطة (bounding boxes) نظيفة ودقيقة، تمنح نماذج Ultralytics YOLO شبكات إعادة تحديد الهوية مدخلات عالية الجودة للعمل بها، مما يؤدي إلى مطابقة أكثر موثوقية عبر الكاميرات.
Link to this sectionدعم التتبع الموثوق لكاميرا واحدة#
بمجرد اكتشاف المركبات، يمكن لنماذج مثل YOLO11 أيضاً دعم تتبع الأشياء المستقر ضمن عرض كاميرا واحدة. تتبع الأشياء هو عملية متابعة مركبة مكتشفة عبر إطارات متتالية وتعيين معرف (ID) ثابت لها أثناء تحركها.
مع الدعم المدمج لخوارزميات التتبع مثل ByteTrack و BoT-SORT في حزمة Ultralytics Python، يمكن لـ YOLO11 الحفاظ على معرفات ثابتة أثناء تحرك المركبات عبر المشهد. يقلل هذا التتبع المستقر من تبديلات الهوية قبل أن يتولى نظام إعادة تحديد الهوية المسؤولية، مما يحسن في النهاية من دقة المطابقة عبر الكاميرات.
Link to this sectionإعادة تحديد الهوية اختيارياً على مستوى المتتبع لتحسين ثبات الهوية#
بالإضافة إلى التتبع القياسي القائم على الحركة، تتضمن حزمة Ultralytics Python قدرات اختيارية لإعادة تحديد الهوية قائمة على المظهر داخل متتبع BoT-SORT. وهذا يعني أن المتتبع يمكنه استخدام ميزات المظهر البصري، وليس فقط أنماط الحركة أو تداخل الصناديق المحيطة، لتحديد ما إذا كان اكتشافان ينتميان إلى نفس المركبة.
عند تمكينه، يستخرج BoT-SORT تضمينات مظهر خفيفة الوزن من الكاشف أو من نموذج تصنيف YOLO11 ويستخدمها للتحقق من الهوية بين الإطارات. تساعد إشارة المظهر الإضافية هذه المتتبع في الحفاظ على معرفات أكثر استقراراً في المواقف الصعبة، مثل الحجب الوجيز، أو مرور المركبات بالقرب من بعضها البعض، أو التحولات الصغيرة الناتجة عن حركة الكاميرا.
على الرغم من أن إعادة تحديد الهوية المدمجة هذه ليست مخصصة لاستبدال إعادة تحديد هوية المركبات الكاملة عبر الكاميرات، إلا أنها تعمل على تحسين اتساق الهوية ضمن عرض كاميرا واحدة وتنتج مسارات تتبع أنظف يمكن لوحدات إعادة تحديد الهوية اللاحقة الاعتماد عليها. لاستخدام ميزات التتبع القائمة على المظهر هذه، يمكنك ببساطة تمكين إعادة تحديد الهوية في ملف تكوين متتبع BoT-SORT عن طريق تعيين "with_reid" إلى "True" واختيار النموذج الذي سيوفر ميزات المظهر.
لمزيد من التفاصيل، يمكنك الاطلاع على صفحة وثائق Ultralytics حول تتبع الأشياء، التي تشرح خيارات إعادة تحديد الهوية المتاحة وكيفية تكوينها.
Link to this sectionتوفير مدخلات عالية الجودة لشبكات إعادة تحديد الهوية#
إلى جانب تحسين ثبات الهوية أثناء التتبع، تلعب نماذج YOLO أيضاً دوراً مهماً في إعداد مدخلات بصرية نظيفة لشبكة إعادة تحديد الهوية نفسها.
بعد اكتشاف المركبة، يتم عادةً قص صندوقها المحيط وإرساله إلى شبكة إعادة تحديد الهوية، التي تستخرج الميزات البصرية اللازمة للمطابقة. ونظراً لأن نماذج إعادة تحديد الهوية تعتمد بشكل كبير على هذه الصور المقصوصة، فإن المدخلات الضعيفة، مثل القص غير الواضح أو غير المحاذى أو غير الكامل، يمكن أن تؤدي إلى تضمينات أضعف ومطابقة أقل موثوقية عبر الكاميرات.
تساعد نماذج Ultralytics YOLO في تقليل هذه المشكلات من خلال إنتاج صناديق محيطة نظيفة ومحاذية جيداً تلتقط المركبة المعنية بالكامل باستمرار. ومع قصاصات أكثر وضوحاً ودقة، يمكن لشبكة إعادة تحديد الهوية التركيز على التفاصيل ذات المغزى مثل اللون والشكل والملمس وميزات التمييز الأخرى. تؤدي المدخلات عالية الجودة إلى أداء أكثر اعتمادية ودقة في إعادة تحديد الهوية عبر وجهات نظر الكاميرا.
Link to this sectionتمكين المطابقة عبر الكاميرات عند دمجها مع نموذج لإعادة تحديد الهوية#
على الرغم من أن نماذج Ultralytics YOLO لا تقوم بإعادة تحديد الهوية بمفردها، إلا أنها توفر المعلومات المهمة التي تحتاجها شبكة إعادة تحديد الهوية لمقارنة المركبات عبر وجهات نظر مختلفة للكاميرا. يمكن لنماذج مثل YOLO11 تولي مهمة تحديد مواقع المركبات وتتبعها داخل كل كاميرا، بينما يحدد نموذج إعادة تحديد الهوية ما إذا كانت قصاصتان لمركبتين من مواقع مختلفة تنتميان إلى نفس الهوية.
عندما تعمل هذه المكونات معاً، YOLO للاكتشاف والتتبع، ونموذج تضمين مخصص لاستخراج الميزات، فإنها تشكل خط أنابيب كاملاً لمطابقة المركبات عبر كاميرات متعددة. وهذا يجعل من الممكن ربط نفس المركبة أثناء تحركها عبر شبكة كاميرات أكبر.
على سبيل المثال، في دراسة حديثة، استخدم الباحثون نموذج YOLO11 خفيف الوزن كـ كاشف للمركبات في نظام تتبع عبر الإنترنت متعدد الكاميرات. وجدت الدراسة أن استخدام YOLO11 ساعد في تقليل وقت الاكتشاف دون التضحية بالدقة، مما أدى إلى تحسين الأداء العام للتتبع والمطابقة عبر الكاميرات.

شكل 3. تتبع وإعادة تحديد هوية المركبات المتعددة عبر كاميرات متعددة بناءً على YOLO11. (المصدر)
Link to this sectionبنى قائمة على التعلم العميق لإعادة تحديد هوية المركبات#
الآن بعد أن أصبح لدينا فهم أفضل لكيفية دعم نماذج Ultralytics YOLO لإعادة تحديد هوية المركبات، دعونا نلقي نظرة فاحصة على نماذج التعلم العميق التي تتعامل مع خطوات استخراج الميزات والمطابقة. هذه النماذج مسؤولة عن تعلم كيف تبدو المركبات، وإنشاء تضمينات قوية، والتمييز بين المركبات المتشابهة بصرياً عبر وجهات نظر مختلفة للكاميرا.
إليك بعض الأمثلة على مكونات التعلم العميق الأساسية المستخدمة في أنظمة إعادة تحديد هوية الأشياء:
-
استخراج الميزات باستخدام CNNs: تتعلم الشبكات العصبية التلافيفية مثل ResNet50 أو ResNet101 ميزات عميقة من خلال التعرف على الأنماط، وتحديد عناصر مثل اللون والشكل والملمس التي تميز مركبة عن أخرى. يتم بعد ذلك تحويل هذه الأنماط المكتسبة إلى تضمينات تعمل كتمثيل رقمي فريد للمركبة.
-
آليات الانتباه والمحولات: يمكن لشبكات وطبقات الانتباه، بما في ذلك الانتباه المكاني، المساعدة في إبراز مناطق مهمة من المركبة، مثل المصابيح الأمامية، أو النوافذ، أو مناطق لوحة الترخيص. يركز الانتباه المكاني النموذج على المكان الذي توجد فيه الإشارات البصرية الأكثر إفادة، بينما تلتقط النماذج القائمة على المحولات مثل محولات الرؤية (ViT) العلاقات العالمية عبر الصورة بأكملها. معاً، تعمل على تحسين الدقة التفصيلية عندما تبدو المركبات متشابهة جداً.
-
الشبكات القائمة على الأجزاء ومتعددة الفروع: تحلل بعض نماذج إعادة تحديد الهوية مناطق مركبة محددة بشكل منفصل، مثل السقف، أو الأضواء الخلفية، أو الألواح الجانبية، ثم تجمع النتائج. وهذا يعني أن النظام يظل قوياً حتى عندما تكون المركبات محجوبة جزئياً أو يتم عرضها من زوايا صعبة.
بالإضافة إلى هذه المكونات المعمارية، يلعب تعلم المقياس (metric learning) دوراً رئيسياً في تدريب نماذج إعادة تحديد هوية المركبات. تساعد دوال الخسارة مثل triplet loss، و contrastive loss، و cross-entropy loss النظام على تعلم تضمينات قوية ومميزة من خلال تقريب صور نفس المركبة مع إبعاد الصور المختلفة عن بعضها البعض.
Link to this sectionمجموعات بيانات ومعايير إعادة تحديد هوية المركبات الشهيرة#
في أبحاث الرؤية الحاسوبية، لجودة مجموعة البيانات تأثير كبير على مدى جودة أداء النموذج بمجرد نشره. توفر مجموعة البيانات الصور أو مقاطع الفيديو المصنفة التي يتعلم منها النموذج.
بالنسبة لإعادة تحديد هوية المركبات، يجب أن تلتقط مجموعات البيانات المتطورة هذه ظروفاً متنوعة مثل الإضاءة، وتغيرات وجهة النظر، واختلافات الطقس. يساعد هذا التنوع النماذج على التعامل مع تعقيد بيئات النقل الواقعية.
إليك لمحة عن مجموعات البيانات الشهيرة التي تدعم تدريب وتحسين وتقييم نماذج إعادة تحديد هوية المركبات:
- مجموعة بيانات VeRi-776: هي مجموعة تضم أكثر من 50,000 صورة مركبة مشروحة التقطت من 20 كاميرا مدينة. تتضمن التعليقات التوضيحية معرف المركبة، واللون، والطراز، ومناطق لوحة الترخيص، مما يتيح تعلم الميزات بشكل مفصل.
- مجموعة بيانات VehicleID: تحتوي مجموعة البيانات واسعة النطاق هذه على أكثر من 200,000 صورة تمثل أكثر من 26,000 مركبة. غالباً ما يتم اختيارها لدراسة قابلية التوسع وإجراء مقارنات أساسية بين طرق مختلفة.
- مجموعة بيانات VeRi-Wild: صُممت لتعكس التباين في العالم الحقيقي، بما في ذلك الاختلافات في وجهة النظر، والطقس، والحجب الجزئي. تُستخدم بشكل شائع لتقييم قوة النموذج وتعميمه.

شكل 4. مثال للمركبات في مجموعة بيانات VeRi-776. (المصدر)
يتم تقييم أداء النموذج في مجموعات البيانات هذه عادةً باستخدام مقاييس مثل متوسط الدقة (mAP) ودقة Rank-1 أو Rank-5. يقيس mAP مدى دقة النموذج في استرجاع جميع المطابقات ذات الصلة لمركبة معينة، بينما تشير نتائج Rank-1 و Rank-5 إلى ما إذا كانت المطابقة الصحيحة تظهر في أعلى قائمة النتائج أو ضمن التوقعات القليلة الأولى.
معاً، تمنح هذه المعايير الباحثين طريقة متسقة لمقارنة الأساليب المختلفة وتلعب دوراً مهماً في توجيه تطوير أنظمة إعادة تحديد هوية مركبات أكثر دقة وموثوقية للاستخدام في العالم الحقيقي.
Link to this sectionتطبيقات إعادة تحديد هوية المركبات#
الآن بعد أن غطينا الأساسيات، دعونا نستعرض بعض حالات الاستخدام الواقعية حيث تدعم إعادة تحديد هوية المركبات سير عمل النقل والتنقل والمراقبة العملية.
Link to this sectionمراقبة ورصد حركة المرور في المناطق الحضرية#
تمتلئ طرق المدينة المزدحمة بالحركة باستمرار، وغالباً ما تجد كاميرات المرور صعوبة في تتبع نفس المركبة أثناء انتقالها بين مناطق مختلفة. يمكن أن تؤدي تغيرات الإضاءة، والمشاهد المزدحمة، والمركبات التي تبدو متطابقة تقريباً إلى فقدان الهوية عبر الكاميرات.
تعالج إعادة تحديد هوية المركبات ذلك من خلال اكتشاف المركبات بوضوح، واستخراج ميزات مميزة، والحفاظ على معرفات ثابتة حتى في اللقطات منخفضة الدقة أو المزدحمة. والنتيجة هي تتبع أكثر سلاسة واستمرارية عبر الشبكة، مما يمنح فرق المرور صورة أوضح لكيفية تحرك المركبات عبر المدينة وتمكين استجابات أسرع وأكثر استنارة للازدحام والحوادث.
Link to this sectionأنظمة وقوف السيارات الذكية#
تعتمد مرافق وقوف السيارات الذكية على تحديد ثابت للمركبة لإدارة الدخول، والخروج، والتحكم في الوصول، وتخصيص المساحة. ومع ذلك، غالباً ما تلتقط الكاميرات في هذه البيئات المركبات من زوايا غير معتادة وتحت إضاءة صعبة، مثل المرائب تحت الأرض، أو المناطق المظللة، أو المواقف الخارجية عند الغسق.
تجعل هذه الظروف من الصعب التأكد مما إذا كانت نفس المركبة تُرى عبر مناطق مختلفة. عندما تكون الهويات غير متسقة، يمكن أن تتعطل سجلات وقوف السيارات، ويصبح التحكم في الوصول أقل موثوقية، وقد يواجه السائقون تأخيرات. ولهذا السبب تدمج العديد من أنظمة وقوف السيارات الذكية نماذج إعادة تحديد هوية المركبات للحفاظ على هوية ثابتة لكل مركبة أثناء تحركها عبر المرفق.
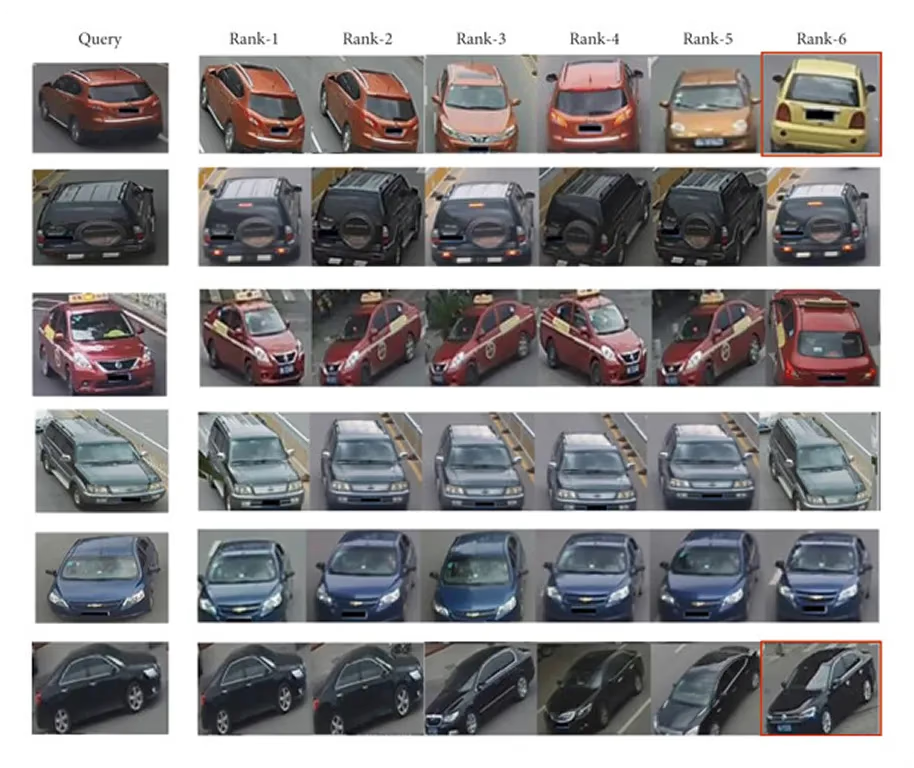
شكل 5. مثال على إعادة تحديد هوية المركبات يظهر صورة المركبة المختارة على اليسار ونتائج البحث المطابقة على اليمين. (المصدر)
Link to this sectionإنفاذ القانون والطب الشرعي#
بالبناء على مراقبة حركة المرور، تلعب إعادة تحديد هوية المركبات أيضاً دوراً مهماً في إنفاذ القانون والتحقيقات الجنائية. في كثير من الحالات، يحتاج الضباط إلى متابعة مركبة عبر عدة كاميرات، ولكن قد تكون لوحات الترخيص غير مقروءة، أو مفقودة، أو مخفية عمداً.
يمكن أن تجعل المشاهد المزدحمة، وضعف الرؤية، والحجب الجزئي المركبات المختلفة تبدو متشابهة بشكل خادع، مما يجعل التحديد اليدوي بطيئاً وغير موثوق. يمكن استخدام إعادة تحديد هوية المركبات لتتبع حركة المركبة عبر شبكات الكاميرات غير المتداخلة من خلال تحليل ميزاتها البصرية بدلاً من الاعتماد فقط على لوحات الترخيص.
هذا يعني أنه يمكن للمحققين متابعة تحركات المركبة بسهولة أكبر، ومعرفة متى ظهرت في مواقع مختلفة، وتأكيد مسارها قبل وبعد وقوع الحادث. تدعم إعادة تحديد هوية المركبات المدعومة بالذكاء الاصطناعي أيضاً مهاماً مثل تتبع المركبات المشتبه بها، ومراجعة لقطات الحوادث، أو تحديد الاتجاه الذي سافرت فيه المركبة قبل أو بعد وقوع حدث ما.
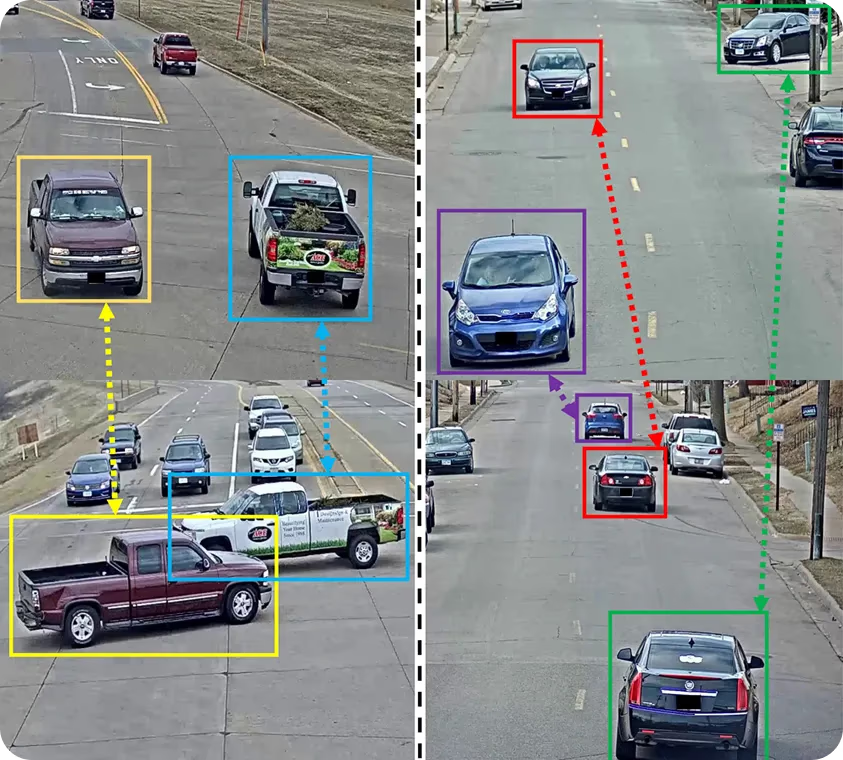
شكل 6. مركبات تمت مطابقتها عبر كاميرات مختلفة مع وجهات نظر متنوعة. (المصدر)
Link to this sectionتتبع الأسطول والخدمات اللوجستية#
تعتمد عمليات الأسطول والخدمات اللوجستية غالباً على GPS، وعلامات RFID، والسجلات اليدوية لتتبع حركة المركبات، لكن هذه الأدوات تترك فجوات في المناطق التي تغطيها كاميرات الأمن أو كاميرات الساحة، مثل منصات التحميل، وساحات المستودعات، وشبكات الطرق الداخلية.
تنتقل المركبات بشكل متكرر بين كاميرات لا تتداخل، أو تختفي خلف هياكل، أو تبدو متطابقة تقريباً مع مركبات أخرى في الأسطول، مما يجعل من الصعب التأكد مما إذا كانت نفس المركبة قد شوهدت في مواقع مختلفة. يمكن أن تساعد أنظمة إعادة تحديد هوية المركبات في سد هذه الفجوات من خلال تحليل التفاصيل البصرية ومعلومات التوقيت للحفاظ على هوية ثابتة لكل مركبة أثناء تحركها عبر المرفق.
يمنح هذا مديري الأسطول رؤية أكثر اكتمالاً للنشاط داخل مراكزهم، مما يدعم مهاماً مثل التحقق من مسارات التسليم، وتحديد الحركة غير العادية، والتأكد من أن المركبات تتبع المسارات المتوقعة.
Link to this sectionإيجابيات وسلبيات مهام إعادة تحديد هوية المركبات#
إليك بعض المزايا الرئيسية لاستخدام إعادة تحديد هوية المركبات المدعومة بالذكاء الاصطناعي:
- تقليل عبء العمل اليدوي: تعمل إعادة تحديد هوية المركبات على أتمتة مهام مطابقة الهوية التي كانت ستتطلب خلاف ذلك مراجعة يدوية مكثفة، مما يقلل بشكل كبير من الوقت والجهد اللازمين لتحليل لقطات الفيديو.
- الأتمتة والرؤى في الوقت الفعلي: من خلال الجمع بين الاكتشاف، والتتبع، ومطابقة الميزات، تدعم إعادة تحديد هوية المركبات المراقبة المؤتمتة المستمرة ويمكنها توفير تنبيهات في الوقت الفعلي لاستجابة أسرع للحوادث.
- قابلية التوسع والتكيف: يمكن لنماذج إعادة تحديد الهوية التكيف مع بيئات جديدة، أو ظروف إضاءة، أو زوايا كاميرا من خلال تعلم الميزات القوي، واستخراج الميزات متعددة النطاق، والتمثيلات الثابتة التي تظل مستقرة تحت التغيرات البصرية. هذه القدرات تجعلها مناسبة لشبكات المدن الكبيرة وعمليات النشر الأصغر على حد سواء.
بينما توفر إعادة تحديد هوية المركبات العديد من المزايا، هناك أيضاً بعض القيود التي يجب مراعاتها. إليك بعض العوامل التي تؤثر على موثوقيتها في بيئات العالم الحقيقي:
- طلب حسابي مرتفع: يتطلب استخراج الميزات، وتوليد التضمين، والمطابقة عبر الكاميرات قوة معالجة كبيرة، خاصة عند مراقبة شبكات كبيرة من الكاميرات.
- تباين البيئة: يمكن لعوامل مثل إضاءة الليل، وتغيرات الطقس، والظلال، والحجب أن تؤدي إلى تدهور قدرة النموذج على الحفاظ على هويات ثابتة عبر المشاهد.
- قيود مجموعة البيانات والمجال: قد لا تعمم النماذج المدربة على مجموعات بيانات محدودة أو مثالية بشكل جيد على ظروف العالم الحقيقي دون مزيد من الضبط أو تكييف المجال.
Link to this sectionالطريق أمام أساليب إعادة تحديد هوية المركبات#
تستمر إعادة تحديد هوية المركبات في التقدم مع تطور التكنولوجيا. تسلط المنشورات الأخيرة من IEEE و CVPR و arXiv، جنباً إلى جنب مع العروض التقديمية في المؤتمرات الدولية، الضوء على تحول واضح نحو نماذج أكثر ثراءً تجمع بين مصادر بيانات متعددة وتفكير ميزات أكثر تقدماً. من المرجح أن يركز العمل المستقبلي في هذا المجال على بناء أنظمة أكثر قوة، وكفاءة، وقدرة على التعامل مع تباين العالم الحقيقي على نطاق واسع.
على سبيل المثال، أحد الاتجاهات الواعدة هو استخدام النماذج القائمة على المحولات وشبكات تجميع الرسوم البيانية. يمكن للمحولات تحليل صورة كاملة وفهم كيفية تناسب جميع التفاصيل البصرية معاً، مما يساعد النظام في التعرف على نفس المركبة حتى عندما تتغير الزاوية أو الإضاءة.
تتخذ النماذج القائمة على الرسم البياني خطوة أبعد من ذلك من خلال التعامل مع أجزاء المركبات المختلفة أو زوايا الكاميرا كنقاط متصلة في شبكة. يتيح ذلك للنظام فهم الارتباط بين تلك النقاط الرئيسية واتخاذ قرارات أفضل بشأن هويات المركبات والميزات التمييزية.
تتمثل ميزة رئيسية أخرى في دمج البيانات متعدد الوسائط ودمج الميزات. فبدلاً من الاعتماد فقط على الصور، تجمع الأنظمة الأحدث بين المعلومات المرئية وإشارات الوسائط المتعددة الأخرى، مثل بيانات GPS أو أنماط الحركة من المستشعرات. هذا السياق الإضافي يجعل من الأسهل على النظام الحفاظ على الدقة عندما تكون المركبات محجوبة جزئياً، أو عند ضعف الإضاءة، أو عندما تتغير زوايا الكاميرا فجأة.
Link to this sectionأبرز النقاط#
أصبحت عملية إعادة تعريف هوية المركبة منهجية أساسية في أنظمة النقل الذكية، مما يساعد المدن على تتبع المركبات بشكل أكثر موثوقية عبر كاميرات مختلفة. بفضل التقدم في التعلم العميق والتحقق الأفضل باستخدام مجموعات بيانات أكثر ثراءً وتنوعاً، أصبحت هذه الأنظمة أكثر دقة وعملية في ظروف العالم الحقيقي.
مع تطور التكنولوجيا، من المهم الموازنة بين الابتكار والممارسات المسؤولة المتعلقة بالخصوصية والأمن والأخلاق. وبشكل عام، تمهد هذه التطورات الطريق لشبكات نقل أكثر ذكاءً وأماناً وكفاءة.
اكتشف المزيد حول الذكاء الاصطناعي من خلال زيارة مستودع GitHub الخاص بنا والانضمام إلى مجتمعنا. تحقق من صفحات الحلول الخاصة بنا للتعرف على الذكاء الاصطناعي في الروبوتات والرؤية الحاسوبية في التصنيع. اكتشف خيارات الترخيص الخاصة بنا للبدء في استخدام الذكاء الاصطناعي البصري اليوم!






