تحسين التنبؤ بالاصطدام باستخدام نماذج Ultralytics YOLO
تعرف على كيفية مساعدة رؤى نماذج Ultralytics YOLO لأنظمة التنبؤ بالاصطدام في اتخاذ قرارات أكثر أماناً وسرعة في البيئات الديناميكية.
على الرغم من توخي الحذر على الطريق، إلا أن الحوادث قد تقع. فقد تغير سيارة مسارها، أو يعبر أحد المشاة الطريق فجأة، أو تزيد دراجة هوائية سرعتها دون سابق إنذار. هذه اللحظات اليومية هي أمثلة على الحالات التي يمكن فيها لأنظمة التنبؤ بالاصطدام إحداث فرق حقيقي والمساعدة في الحفاظ على سلامة الجميع.
في السابق، نظرنا إلى توقع مسار الكرة ورأينا كيف تساعد عملية توقع مسار كرة سريعة الحركة في تحليلات الرياضة على فهم الحركة وتوقع ما سيحدث لاحقًا. يعمل التنبؤ بالاصطدام بطريقة مشابهة.
تستشرف أنظمة التنبؤ هذه المستقبل بشكل أساسي. فمن خلال مراقبة كيفية تحرك المركبات والمشاة، يمكنها رصد المخاطر مبكرًا وتعديل مسارها أو سلوكها قبل أن تتخذ الأمور منعطفًا خطيرًا (وهو ما يُعرف بتخطيط الحركة أو تخطيط المسار).
تقنيات علوم الحاسوب الرئيسية وراء أنظمة التنبؤ بالاصطدام هي الذكاء الاصطناعي ومجالاته الفرعية، مثل الرؤية الحاسوبية وطرق التنبؤ التي تساعد في توقع كيفية تحرك الأشياء. على سبيل المثال، يمكن استخدام نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 ونموذج Ultralytics YOLO26 القادم للكشف عن الكائنات مثل المركبات والمشاة وتتبعها في الوقت الفعلي، وتستخدم نماذج التنبؤ تلك الرؤى لتقدير تحركاتها التالية.
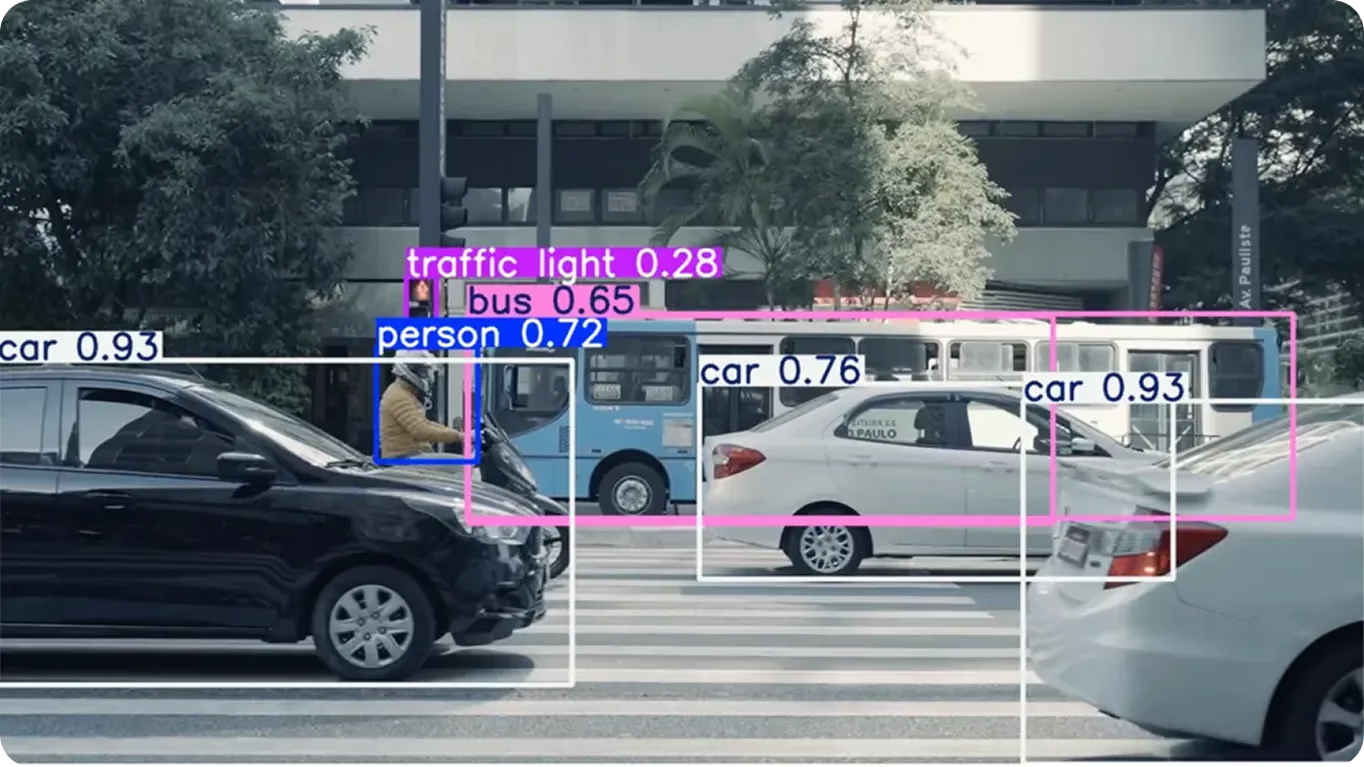
شكل 1. مثال على استخدام YOLO11 لاكتشاف الأجسام على الطريق (المصدر).
والنتيجة هي نظام ذكاء اصطناعي يفهم ما يحدث حوله ويدعم اتخاذ قرارات أكثر ذكاءً في البيئات الديناميكية. في هذا المقال، سنستكشف كيفية عمل التنبؤ بالاصطدام، والطرق الكامنة وراءه، والدور الذي يمكن أن تلعبه الرؤية الحاسوبية ونماذج Ultralytics YOLO في هذه العملية. لنبدأ!
Link to this sectionما هو التنبؤ بالاصطدام؟#
التنبؤ بالاصطدام هو قدرة نظام الذكاء الاصطناعي على فهم كيفية تحرك الكائنات وتوقع متى قد تقترب جدًا أو تتصادم. يمكن للأنظمة المختلفة استخدام هذه المعلومات بطرق عديدة، بما في ذلك دعم ميزات السلامة، وتحسين الحركة، أو تنسيق الإجراءات في المساحات المشتركة.
حيثما تتحرك الكائنات عبر مساحة مشتركة، سواء كان ذلك سيارات على طريق سريع، أو رافعات شوكية في ممر مستودع، أو مشاة يعبرون الشارع، يساعد التنبؤ بالاصطدام الأنظمة على فهم كيف يمكن أن تتكشف هذه التفاعلات. في التطبيقات التي تركز على السلامة، يمكن استخدام هذا الاستبصار لتقليل المخاطر، بينما في بيئات أخرى، يمكن أن يدعم مهامًا مثل تخطيط المسار، والتوقيت، أو الحركة المنسقة.
على سبيل المثال، في العديد من المركبات الأحدث المجهزة بأنظمة مساعدة السائق المتقدمة، أو ADAS، تراقب الكاميرات والمستشعرات الطريق أمامها وتقدر مدى سرعة اقتراب السيارة من الكائنات القريبة. إذا اكتشف النظام أن الموقف قد يصبح غير آمن، فإنه ينبه السائق، وفي بعض الحالات، قد يساعد الكبح التلقائي في تقليل قوة الاصطدام.
Link to this sectionاستكشاف المراحل الأربع للتنبؤ بالاصطدام#
يتضمن التنبؤ بالاصطدام عملية منسقة تعمل فيها مكونات الذكاء الاصطناعي المختلفة معًا لتحديد الكائنات، ومتابعة حركتها، وتقدير ما قد يحدث لاحقًا. تعمل هذه الأنظمة عادةً من خلال أربع مراحل مترابطة: اكتشاف الكائنات، وتتبع الكائنات، وتوقع المسار، وأخيرًا التنبؤ بالاصطدام، حيث تعتمد كل مرحلة على دقة المرحلة السابقة لها.
بعد ذلك، لنلقِ نظرة فاحصة على كيفية عمل كل مرحلة.
Link to this sectionنظرة على اكتشاف الكائنات#
اكتشاف الكائنات هو مهمة أساسية في الرؤية الحاسوبية حيث تقوم نماذج الذكاء الاصطناعي البصري بتحديد وتحديد موقع الكائنات في إطار صورة أو فيديو. من خلال تحليل بيانات البكسل، يمكن لنموذج اكتشاف الكائنات إنتاج ثلاثة مخرجات رئيسية: صناديق الإحاطة، وفئات الكائنات، ودرجات الثقة. تُظهر صناديق الإحاطة مكان وجود الكائن، وتشير فئات الكائنات إلى ماهيته، مثل سيارة أو مشاة أو دراجة هوائية، وتعكس درجات الثقة مدى تأكد النموذج من التنبؤ.
تبني نماذج الرؤية الحاسوبية مثل YOLO11 و YOLO26 على هذا الأساس وتدعم العديد من المهام ذات الصلة، بما في ذلك اكتشاف الكائنات، وتتبع الكائنات، واكتشاف صناديق الإحاطة الموجهة (OBB). يمكن لاكتشاف الكائنات إخبار نظام التنبؤ بما يوجد في كل إطار، ويقوم التتبع بمتابعة تلك الكائنات أثناء تحركها، وتوفر صناديق الإحاطة الموجهة أشكالًا أكثر دقة للكائنات التي تظهر بزوايا مختلفة.
في هذه المرحلة، يركز نظام التنبؤ بالاصطدام فقط على فهم ما هو موجود في البيانات المرئية. فهو يشكل الطبقة الأساسية للمعلومات التي تعتمد عليها جميع الخطوات اللاحقة، لكنه لا يأخذ في الاعتبار بعد كيفية تحرك الكائنات أو تفاعلها.
Link to this sectionنظرة عامة على تتبع الكائنات#
بمجرد اكتشاف الكائنات، تكون الخطوة التالية هي تتبعها عبر الإطارات حتى يتمكن النظام من فهم كيفية تحركها بمرور الوقت. بينما يوفر الاكتشاف صناديق إحاطة جديدة في كل إطار، يضيف تتبع الكائنات الاستمرارية من خلال ربط تلك الاكتشافات بمرور الوقت.
تعمل خوارزميات التتبع المدعومة بواسطة حزمة Ultralytics Python، مثل ByteTrack أو BoT-SORT، مع نماذج مثل YOLO11 باستخدام بيانات الاكتشاف من كل إطار لمتابعة الكائنات أثناء تحركها. تعين هذه الخوارزميات معرفًا فريدًا لكل كائن وتستخدمه للحفاظ على تلك الهوية حتى عندما يتحرك الكائن بسرعة أو يصبح مخفيًا جزئيًا. وهذا يخلق سجل تتبع سلس يلتقط كيفية تحرك الكائن.

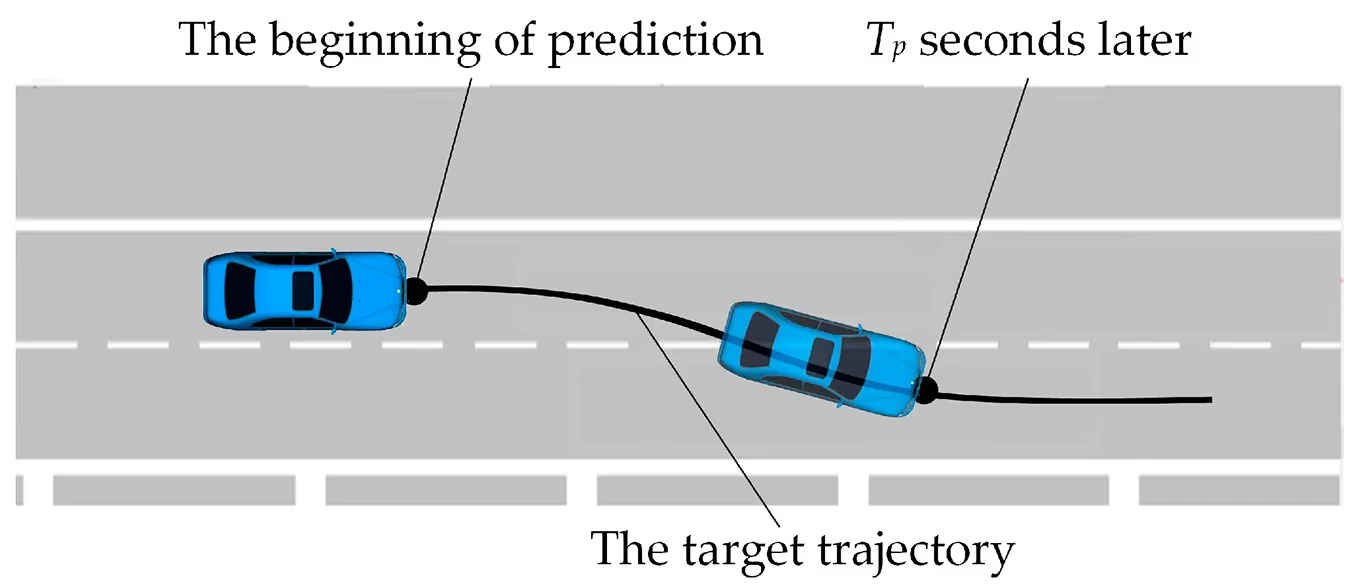
شكل 2. نظرة على تعيين معرفات فريدة لاكتشافات مختلفة باستخدام YOLO (المصدر)
إليك نظرة سريعة على كيفية عمل طريقتي التتبع هاتين:
- ByteTrack: يستخدم كلاً من الاكتشافات ذات الثقة العالية والمنخفضة للحفاظ على معرفات كائنات متسقة، مع تنبؤات حركة من مرشح Kalman تساعد المتعقب على البقاء مستقرًا عندما تتحرك الكائنات بسرعة أو يصعب اكتشافها لفترة وجيزة.
- BoT-SORT: توسع هذه الخوارزمية SORT من خلال الجمع بين تنبؤات حركة مرشح Kalman وإشارات المظهر، مما يسمح للمتعقب بمتابعة الكائنات بشكل أكثر موثوقية في المشاهد المزدحمة أو أثناء الإخفاء الجزئي.
لقياس مدى أداء طرق التتبع هذه، يقوم الباحثون بتقييمها على مجموعات بيانات ومعايير تتبع كائنات متعددة (MOT) راسخة. كما تشمل المقاييس المستخدمة عادةً دقة تتبع الكائنات المتعددة (MOTA)، التي تعكس جودة التتبع الشاملة؛ ودرجة F1 للهوية (IDF1)، التي تقيس مدى اتساق الحفاظ على هويات الكائنات؛ ودقة التتبع من الدرجة العالية (HOTA)، التي تقدم رؤية متوازنة لكل من أداء الاكتشاف ودقة الارتباط.
Link to this sectionفهم توقع المسار#
بعد تتبع كائن عبر إطارات متعددة، تكون الخطوة التالية هي التنبؤ بالمكان الذي سيذهب إليه بعد ذلك. يُعرف هذا بتوقع المسار. بينما يجد الاكتشاف الكائنات ويتابع التتبع كيفية تحركها، يتطلع التوقع إلى المستقبل ويقدر مواقعها المستقبلية.
يمكن استخدام المعلومات المستمدة من الاكتشاف والتتبع، مثل صندوق إحاطة الكائن، وموقعه عبر الإطارات، والمعرف المعين، لحساب ميزات الحركة مثل السرعة، والاتجاه، وأنماط الحركة. تمنح هذه الرؤى المشتقة نموذج التوقع البيانات التي يحتاجها لتقدير المكان الذي من المرجح أن يكون فيه الكائن في الثواني القليلة القادمة.
في الحالات التي تحتوي فيها بيانات التتبع على فجوات أو قفزات مفاجئة، تساعد تقنيات الاستيفاء في إعادة بناء مسارات أكثر سلاسة واتساقًا. يضمن هذا تلقي نموذج التوقع لمدخلات حركة عالية الجودة بدلاً من بيانات موقع غير مكتملة أو مشوشة.
شكل 3. تصور لتوقع مسار سيارة. (المصدر)
لإجراء هذه التنبؤات، تعتمد العديد من الأنظمة على نماذج التعلم العميق المصممة لفهم كيفية تغير حركة الكائن بمرور الوقت. من خلال تحليل سلاسل المواقع السابقة وميزات الحركة المشتقة منها، تتعلم هذه النماذج أنماط الحركة الشائعة وتستخدم تلك المعرفة لتوقع المسارات المستقبلية.
إليك بعض طرق التعلم العميق والتعلم الآلي المستخدمة عادةً لتوقع المسار:
-
الشبكات العصبية المتكررة (RNNs): هي نماذج تعلم عميق مصممة للعمل مع السلاسل، مثل سلسلة من إطارات الفيديو. يمكنها الاحتفاظ بذاكرة للمواقع السابقة واستخدام تلك المعلومات لفهم كيفية تحرك الكائن. يساعد هذا النظام على التعرف على أنماط الحركة البسيطة مثل زيادة السرعة، أو إبطائها، أو التحرك في خط مستقيم.
-
شبكات الذاكرة طويلة المدى قصيرة المدى (LSTMs): هي نوع أكثر تقدمًا من RNN يمكنه تذكر المعلومات لفترات أطول. يسمح لها هذا بالتقاط حركات أكثر تعقيدًا، مثل مركبة تستعد للانعطاف أو أحد المشاة يغير اتجاهه. ولأنها تستطيع تتبع الاتجاهات الأطول، فإنها غالبًا ما تنتج تنبؤات أكثر موثوقية في البيئات المزدحمة.
-
المحولات: تعالج المحولات سلاسل الحركة الكاملة وتستخدم الانتباه للتركيز على أهم تفاصيل هذه السلاسل. وهذا يجعلها فعالة بشكل خاص في المشاهد التي تتفاعل فيها كائنات متعددة، مثل اندماج السيارات أو عبور المشاة.
يمكن لهذه النماذج التنبؤ بالمسارات قصيرة المدى وطويلة المدى. تميل التوقعات قصيرة المدى، التي تقل عادةً عن ثانيتين، إلى أن تكون الأكثر دقة، في حين توفر التنبؤات عبر نوافذ أطول، مثل ثانيتين إلى ست ثوانٍ، مزيدًا من الاستبصار ولكنها تأتي مع قدر أكبر من عدم اليقين.
Link to this sectionتجميع كل شيء معًا: خوارزميات اكتشاف الاصطدام#
في المرحلة النهائية، وهي التنبؤ بالاصطدام، يستخدم النظام كل ما تعلمه حتى الآن: ماهية كل كائن (الاكتشاف)، وكيف تحرك (التتبع)، وأين من المرجح أن يذهب بعد ذلك (التوقع). تتحقق هذه الخطوة مما إذا كانت أي من المسارات المتوقعة قد تتقاطع بطريقة قد تؤدي إلى اصطدام.
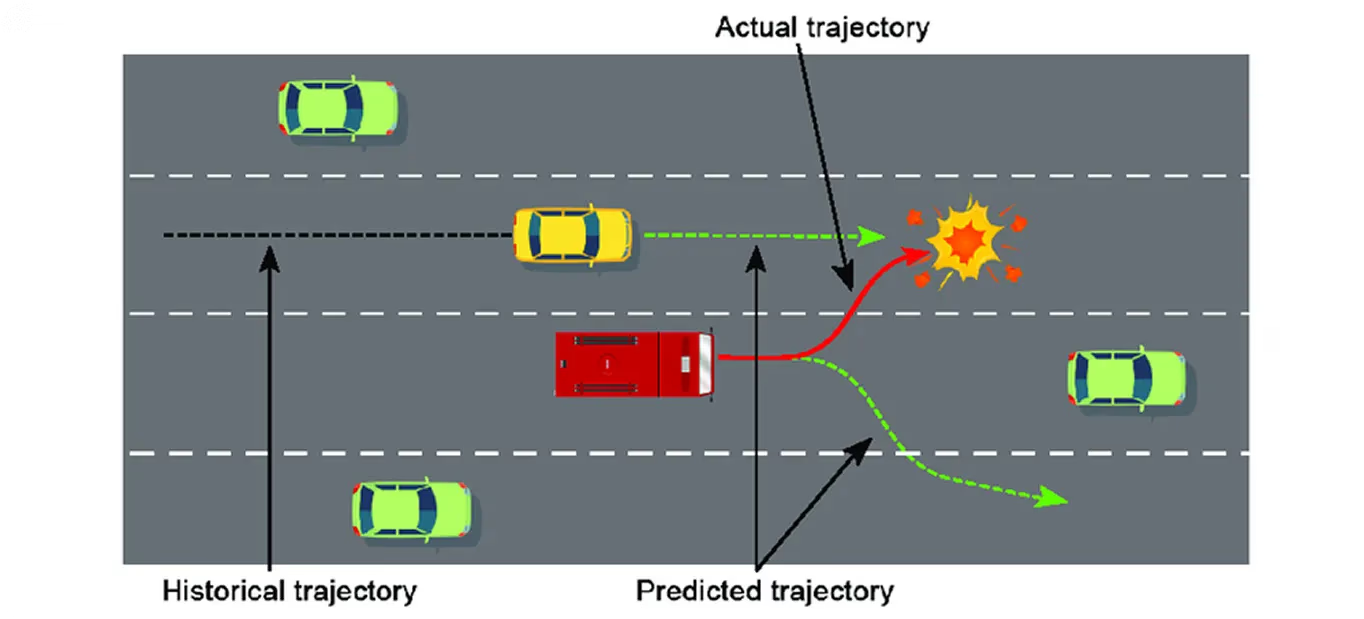
شكل 4. كيف يعمل نظام التنبؤ بالاصطدام (المصدر)
في حالة المركبات ذاتية القيادة، يقارن نظام فحص الاصطدام المسارات المستقبلية للكائنات القريبة مثل السيارات والمشاة وراكبي الدراجات. إذا تداخل مساران متوقعان أو اقتربا بشكل خطير، فإنه يصنف الموقف كاصطدام محتمل للمركبة. لفهم مدى إلحاح خطر الاصطدام، يحسب النظام أيضًا قيمة تُعرف بالوقت المتبقي للاصطدام.
الوقت المتبقي للاصطدام (TTC) هو مقياس رئيسي في البيئات سريعة الحركة. إنه يقدر مقدار الوقت المتبقي قبل اصطدام كائنين إذا استمرا في سرعتيهما واتجاهيهما الحاليين. عندما ينخفض TTC عن حد معين، يمكن للنظام الاستجابة عن طريق إصدار تحذيرات، أو استخدام المكابح، أو تعديل مساره المخطط له.
Link to this sectionتطبيقات العالم الحقيقي للتنبؤ بالاصطدام#
أصبح التنبؤ بالاصطدام أمرًا بالغ الأهمية عبر العديد من الصناعات، بما في ذلك إدارة المرور، والبنية التحتية للمدن الذكية، والأتمتة الصناعية، والروبوتات المتنقلة. مع استمرار تقدم أحدث نماذج الرؤية الحاسوبية والتوقع، أصبحت هذه الأنظمة أكثر قدرة على توقع الحركة.
الآن بعد أن أصبح لدينا فهم أفضل لكيفية عمل التنبؤ بالاصطدام وتوقع المسار، دعونا نلقي نظرة على بعض الدراسات البحثية المثيرة للاهتمام التي تعرض كيف يمكن استخدام هذه الطرق في بيئات حقيقية مختلفة.
Link to this sectionالتنبؤ بالاصطدام المدعوم بـ YOLO للمركبات ذاتية القيادة للطوارئ#
يعد التنقل في البيئات المزدحمة وغير المتوقعة أحد أصعب التحديات للأنظمة ذاتية القيادة، خاصة عندما يتحرك المشاة بطرق لا تتبع أنماطًا واضحة. تواجه مركبات الطوارئ هذه المشكلة بشكل متكرر أكثر، حيث تحتاج إلى التحرك بسرعة بسرعات عالية عبر المساحات العامة المزدحمة دون الاعتماد على طرق منظمة، أو علامات المسار، أو سلوك مشاة متوقع.
في هذه الأنواع من السيناريوهات، يصبح فهم أماكن وجود الأشخاص وكيف قد يتحركون في الثواني القليلة القادمة أمرًا ضروريًا لتجنب الحوادث. على سبيل المثال، استكشفت دراسة بحثية حديثة هذا التحدي من خلال بناء خط أنابيب تنبؤ بالاصطدام كامل لمركبة طوارئ ذاتية القيادة (EAV) تعمل في بيئات يكثر فيها المشاة.
Link to this sectionكيف يعمل خط أنابيب التنبؤ بالاصطدام المدعوم بـ YOLO#
إليك نظرة على كيفية عمل هذه المنهجية:
- اكتشاف المشاة باستخدام YOLO: يحدد كاشف يعتمد على YOLO المشاة في كل إطار كاميرا ويخرج صناديق إحاطة لكل شخص مرئي.
- تتبع الحركة باستخدام ByteTrack: تربط خوارزمية ByteTrack هذه الاكتشافات عبر الإطارات، مما يمنح كل مشاة معرفًا متسقًا وينشئ سجل حركة يوضح كيفية تحركهم بمرور الوقت.
- تقدير الموقع في العالم الحقيقي: تقوم خوارزمية رسم خرائط المنظور العكسي (IPM) بتحويل إحداثيات البكسل ثنائية الأبعاد إلى مواقع تقريبية على مستوى الأرض، مما يساعد النظام على فهم مكان وجود المشاة في مساحة العالم الحقيقي بالنسبة للمركبة.
- إنشاء رؤية عين الطائر باستخدام cGAN: تنشئ شبكة GAN مشروطة، وهي نموذج ذكاء اصطناعي يترجم تنسيق صورة إلى آخر، تمثيلاً لرؤية عين الطائر للمشهد. يجعل هذا التخطيط من الأعلى من الأسهل تفسير مواقع المشاة وما يحيط بهم.
- توقع المسار باستخدام نموذج LSTM: باستخدام المواقع السابقة وأنماط حركة كل مشاة، يتوقع نموذج LSTM المكان الذي من المرجح أن يتحركوا فيه في الثواني القليلة القادمة.
- اكتشاف اصطدام فعال باستخدام مخاريط الاصطدام: تتم مقارنة المسارات المتوقعة باستخدام طريقة مخروط الاصطدام، والتي تحدد ما إذا كانت مسارات المركبة وأي مشاة في طريقها للتقاطع.
- تجنب الاصطدام من خلال الإشارات: إذا تنبأ النظام باصطدام، فإنه ينشط إشارة صوتية (مثل بوق أو جرس) في اللحظة المثلى. يتم اختيار التوقيت للتأثير على سلوك المشاة ومنحهم فرصة لزيادة سرعتهم أو إبطائها والوصول إلى بر الأمان.
Link to this sectionضمان سلامة المشاة في المدن باستخدام الرؤية الطرفية و YOLO#
وبالمثل، تنظر طريقة أخرى لمنع الاصطدام إلى ما هو أبعد من المركبات وتركز على البنية التحتية نفسها. فبدلاً من الاعتماد على مستشعرات داخل السيارة، تستخدم هذه الطريقة كاميرات ذكية مثبتة عند ممرات المشاة والتقاطعات لمراقبة كيفية تحرك المشاة والمركبات في الوقت الفعلي. غالبًا ما تكون هذه المواقع غير متوقعة؛ فقد يخطو الأشخاص إلى الطريق فجأة، وقد ينسج راكبو الدراجات عبر حركة المرور، وقد لا يتباطأ السائقون دائمًا، لذا فإن اكتشاف المخاطر مبكرًا أمر حيوي.
استكشفت دراسة مثيرة للاهتمام هذه الفكرة من خلال نظام يسمى NAVIBox، وهو جهاز رؤية طرفية مصمم للتنبؤ بمخاطر المركبات والمشاة مباشرة عند التقاطع. يستخدم النظام نموذج Ultralytics YOLOv8 لاكتشاف المشاة والمركبات، ومتعقب Centroid خفيف الوزن لمتابعتهم عبر الإطارات. هذا يخلق سجلات حركة قصيرة وموثوقة، والتي يتم تحسينها بعد ذلك باستخدام تحويل المنظور الذي يحول رؤية الدوائر التلفزيونية المغلقة ذات الزوايا إلى تخطيط أكثر وضوحًا لرؤية عين الطائر للطريق.
مع هذه المسارات المحسنة، يمكن لـ NAVIBox تقدير كيفية تحرك مستخدمي الطريق في الثواني القليلة القادمة والتحقق مما إذا كانت مساراتهم قد تتقاطع (يشار إليها أيضًا باختبار التقاطع). عندما يكتشف النظام تفاعلًا محفوفًا بالمخاطر، فإنه يرسل تحذيرات على الفور عبر شاشات للسائقين ومكبرات صوت للمشاة - دون الاعتماد على خادم بعيد أو اتصال شبكة. أظهر الاختبار في مواقع حضرية حقيقية أن NAVIBox يعمل بسرعة كافية للاستجابة الحقيقية في الوقت الفعلي ويمكنه تحديد سيناريوهات الاصطدام المحتملة بدقة، مما يجعله أداة سلامة عملية لتقاطعات المدن المزدحمة.
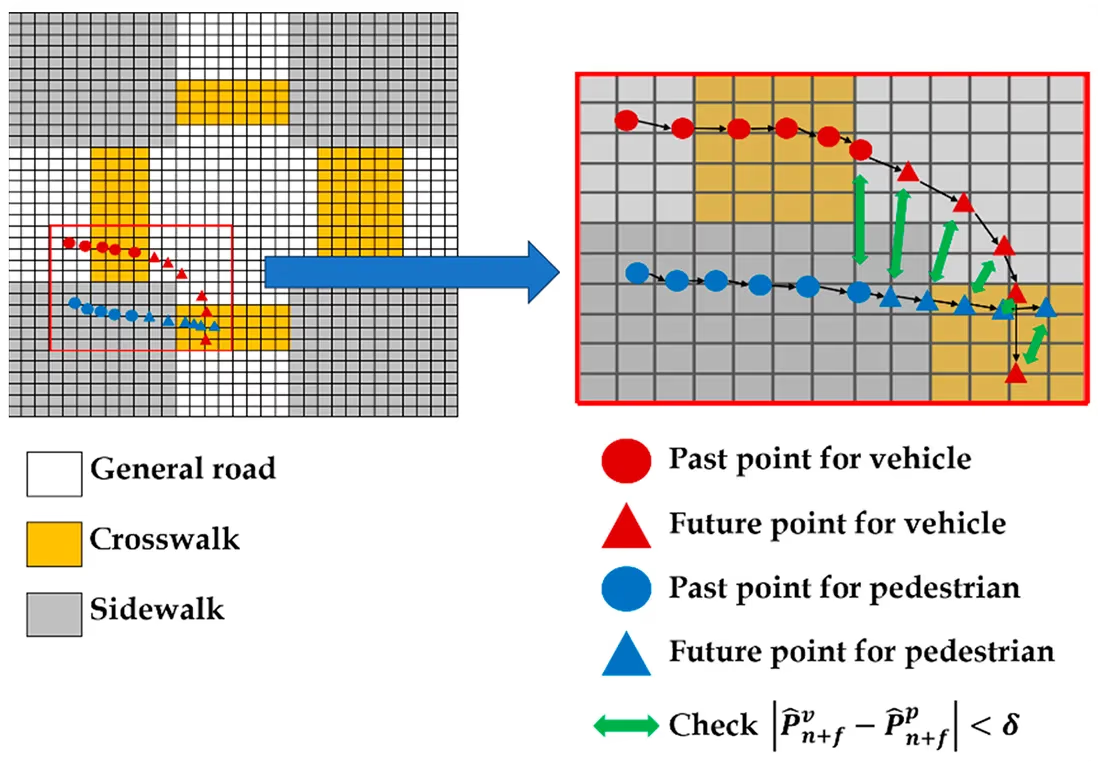
شكل 5. التنبؤ بخطر الاصطدام بين المركبات والمشاة. (المصدر)
Link to this sectionإيجابيات وسلبيات اكتشاف الاصطدام والتنبؤ به#
فيما يلي بعض مزايا استخدام أنظمة التنبؤ بالاصطدام التي تدعمها الذكاء الاصطناعي:
-
تحسين الوعي الظرفي: تقوم أنظمة الذكاء الاصطناعي برسم خرائط مستمرة لكيفية تحرك الكائنات في بيئة ما، مما يوفر فهمًا أغنى لتدفق الحشود واسع النطاق، أو سلوك حركة المرور، أو مسارات الآلات.
-
رؤى تعتمد على البيانات للتخطيط طويل الأمد: من خلال تسجيل الاكتشافات، والحوادث الوشيكة، وأنماط الحركة، توفر أنظمة الذكاء الاصطناعي تحليلات يمكن لمخططي المدن، وفرق السلامة، ومشغلي الأساطيل استخدامها لإعادة تصميم التقاطعات، وتحسين اللافتات، أو تحسين السياسات التشغيلية.
-
الوقاية من المخاطر بتكلفة فعالة: من خلال اكتشاف المخاطر قبل تفاقمها، يمكن لهذه الأنظمة جعل من الممكن تجنب الحوادث المكلفة، أو مطالبات التأمين، أو إصلاحات المعدات.
على الرغم من فوائدها، تواجه أنظمة خلو الاصطدام أيضًا قيودًا معينة. إليك بعض التحديات التي يجب مراعاتها:
- قيود وضع المستشعر والكاميرا: يمكن للكاميرات ذات الموقع أو الزاوية السيئة تشويه حجم الكائن أو مسافته، مما يجعل تقدير العمق وتوقع المسار أقل موثوقية.
- الإخفاء: قد تختفي الكائنات جزئيًا أو كليًا خلف كائنات أخرى. وهذا يجعل تتبع الكائنات أمرًا صعبًا نظرًا لأن النموذج يفقد الاستمرارية المرئية.
- الظروف البيئية: يمكن للإضاءة المنخفضة، أو أشعة الشمس القوية، أو المطر، أو الضباب، أو جودة الكاميرا الضعيفة أن تقلل من قدرة النموذج على رؤية المشهد بوضوح، مما يؤثر على الدقة.
Link to this sectionأبرز النقاط#
يجمع التنبؤ بالاصطدام بين قدرتين قويتين: الرؤية الحاسوبية، التي تسمح للأنظمة بفهم ما يحدث في البيئة في الوقت الحالي، وتوقع المسار، الذي يساعدها على توقع ما من المرجح أن يحدث بعد ذلك.
من خلال الجمع بين هذه نقاط القوة، يمكن للآلات اكتشاف الكائنات المتحركة في الوقت الفعلي والتنبؤ بكيفية تفاعل تلك الكائنات في الثواني القادمة. مع استمرار تطور تقنيات الرؤية الحاسوبية والتوقع، من المرجح أن يصبح التنبؤ بالاصطدام مفتاحًا لبناء أنظمة ذاتية قيادة أكثر أمانًا وموثوقية وقابلية للتوسع.
تفضل بزيارة مجتمعنا و مستودع GitHub لمعرفة المزيد حول الذكاء الاصطناعي. استكشف تطبيقات مثل الذكاء الاصطناعي في الرعاية الصحية و الرؤية الحاسوبية في التصنيع على صفحات الحلول الخاصة بنا. اكتشف خيارات الترخيص الخاصة بنا وابدأ في البناء اليوم!






