What is image matching in vision AI? A quick introduction
Learn how image matching in vision AI works and explore the core technologies that help machines detect, compare, and understand visual data.

When you look at two pictures of the same object, such as a painting and a photograph of a car, it is easy to notice what they have in common. For machines, however, this isn’t so straightforward.
To make such comparisons, machines rely on computer vision, a branch of artificial intelligence (AI) that helps them interpret and understand visual information. Computer vision enables systems to detect objects, understand scenes, and extract patterns from images or videos.
In particular, some visual tasks go beyond analyzing a single image. They involve comparing images to find similarities, spot differences, or track changes over time.
Vision AI spans a wide set of techniques, and one essential capability, known as image matching, focuses on identifying similarities between images, even when lighting, angles, or backgrounds vary. This technique can be used in various applications, including robotics, augmented reality, and geo-mapping.
In this article, we’ll explore what image matching is, its core techniques, and some of its real-world applications. Let’s get started!
Link to this sectionWhat is image matching?#
Image matching makes it possible for a computer system to understand if two images contain similar content. Humans can do this intuitively by noticing shapes, colors, and patterns.
Computers, on the other hand, rely on numerical data. They analyze images by investigating each pixel, which is the smallest unit of a digital image.
Every image is stored as a grid of pixels, and each pixel typically holds values for red, green, and blue (RGB). These values can change when an image is rotated, resized, viewed from a different angle, or captured under different lighting conditions. Because of these variations, comparing images pixel-by-pixel is often unreliable.
To make comparisons more consistent, image matching focuses on local features or corners, edges, and textured regions that tend to stay stable even when an image changes slightly. By detecting these features, or keypoints, across multiple images, a system can compare them with much greater accuracy.
This process is widely used in use cases like navigation, localization, augmented reality, mapping, 3D reconstruction, and visual search. When systems identify the same points across different images or multiple frames, they can track movement, understand scene structure, and make reliable decisions in dynamic environments.
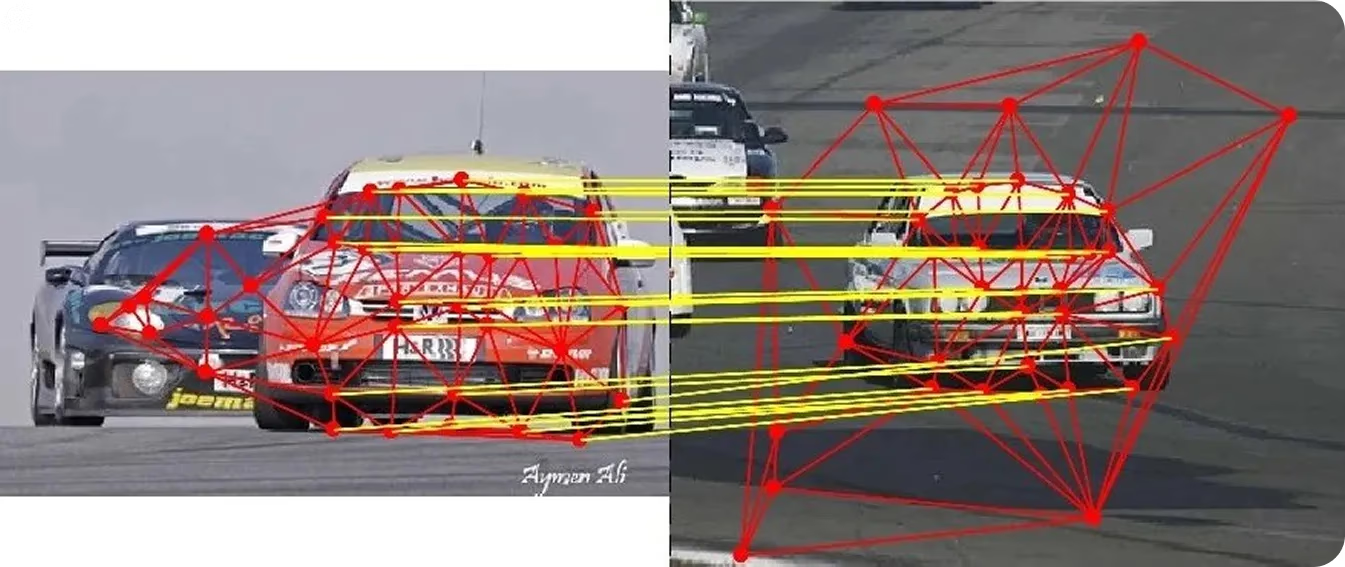
Fig 1. An example of car image matching where similar keypoints are identified. (Source)
Link to this sectionUnderstanding how image matching works#
Image matching involves several key steps that help systems identify and compare similar regions within images. Each step improves accuracy, consistency, and robustness under different conditions.
Here’s a step-by-step look at how image matching works:
- Feature detection: The system first identifies distinctive keypoints in an image that stay stationary even when lighting, scale, or viewing angle changes. They highlight areas such as corners, edges, or textured regions that stand out visually.
- Feature description: Each keypoint is then converted into a descriptor, which is a compact numerical vector that captures the visual pattern around that point. These descriptors provide a reliable way to compare features between different images.
- Feature matching: The descriptors from two images are compared using matching algorithms that calculate how similar they are. This step pairs up keypoints that appear to correspond and filters out weaker or unreliable matches.
- Geometric verification: Finally, the system checks whether the matching keypoints form a realistic geometric relationship. It removes incorrect matches (called outliers) using a method known as RANSAC (Random Sample Consensus), which ensures that only reliable point pairs are kept. Once the good matches are identified, the system estimates the transformation that best relates the two images. This is often an affine transformation, which adjusts for changes like scaling, rotating, and shifting, or a homography, which can also handle perspective changes. Using these transformations allows the system to align the images accurately, even when they were captured from slightly different viewpoints.
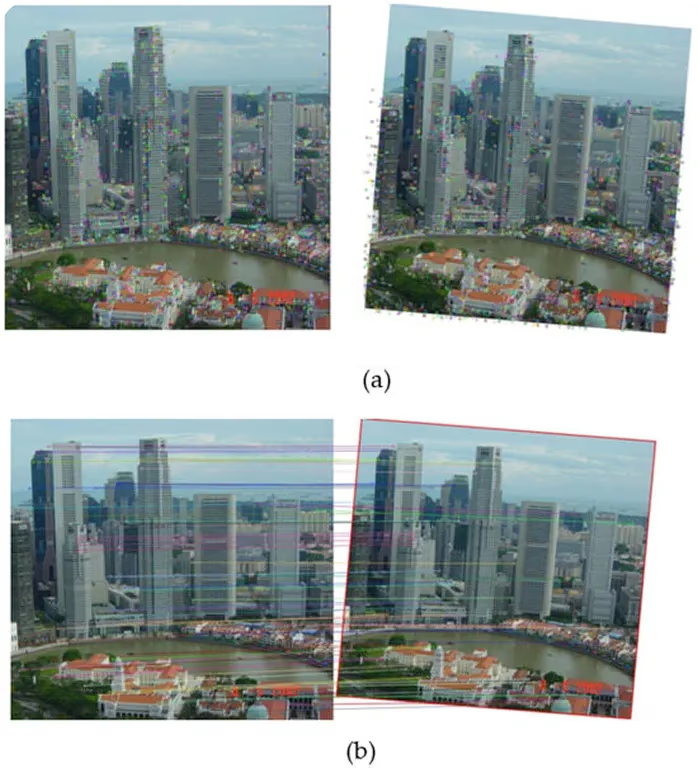
Fig 2. (a) Feature-point extraction and (b) feature matching. (Source)
Link to this sectionCore techniques involved in image matching#
Before we explore the real-world applications of image matching, let’s first take a closer look at the image-matching techniques used in computer vision systems.
Link to this sectionTemplate matching-based image matching#
Template matching is one of the most straightforward image-matching methods. It is generally considered an image-processing technique rather than a modern computer-vision method because it relies on direct pixel comparisons and doesn’t extract deeper visual features.
It is used to locate a smaller reference image, or template, within a larger scene. It works using an algorithm that slides a template across the main image and calculates a similarity score at each position to measure how closely the two regions match. The area with the highest score is considered the best match, indicating where the object is most likely to appear in the scene.
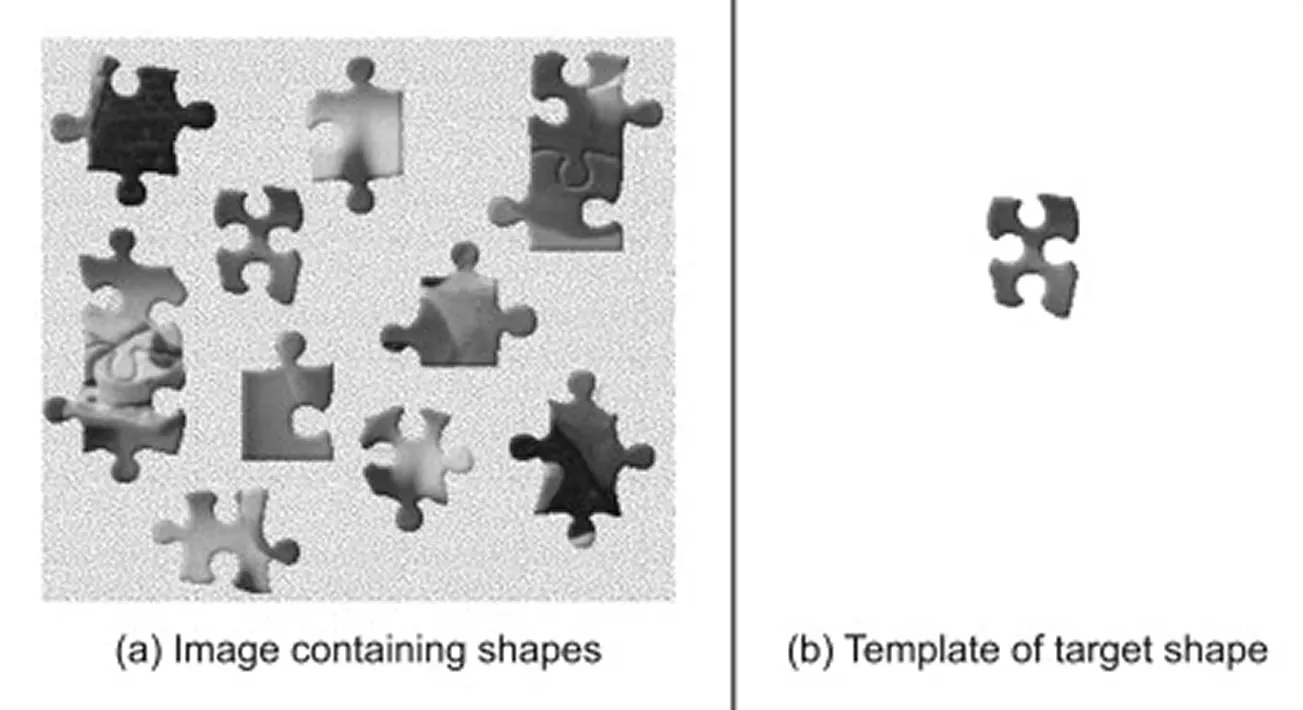
Fig 3. A look at using template matching. (Source)
This technique works well when the object’s scale, rotation, and lighting remain consistent, making it a good choice for controlled environments or baseline comparisons. However, its performance declines when the object looks different from the template, such as when its size changes, it is rotated, partially occluded, or appears against a noisy or complex background.
Link to this sectionClassical feature-based techniques for image matching#
Before deep learning became widely adopted, image matching mostly relied on classical computer vision algorithms that detected distinctive keypoints in an image. Instead of comparing every pixel, these methods analyze image gradients, or changes in intensity, to highlight corners, edges, and textured regions that stand out.
Each detected keypoint is then represented using a compact numerical summary called a descriptor. When comparing two images, a matcher evaluates these descriptors to find the most similar pairs.
A strong similarity score usually indicates that the same physical point appears in both images. Matchers also use specific distance metrics or scoring rules to judge how closely features align, improving overall reliability.
Here are some of the key classical computer vision algorithms used for image matching:
-
SIFT (Scale-Invariant Feature Transform): It identifies keypoints by analyzing image intensity gradients, allowing them to remain recognizable when an image is scaled up, scaled down, or rotated.
-
SURF (Speeded-Up Robust Features): This algorithm is similar to SIFT but is optimized for speed. It uses fast approximations of gradient-based operations, making it suitable for applications that require rapid response times.
-
ORB (Oriented FAST and Rotated BRIEF): It brings together two algorithms called FAST and BRIEF. FAST rapidly finds corner-like points in an image, while BRIEF creates a compact description of each point so they can be matched across images. ORB also enhances both steps by adding rotation handling, making it fast and reliable.

Fig 4. SURF feature points extracted and matched between two images. (Source)
Link to this sectionDeep learning–based techniques for image matching#
Unlike classical methods that rely on specific rules, deep learning automatically learns features from large datasets, which are collections of visual data that AI models learn patterns from. These models typically run on GPUs (Graphics Processing Units), which provide the high computational power needed to process large batches of images and train complex neural networks efficiently.
This gives AI models the ability to handle real-world changes such as lighting, camera angles, and occlusions. Some models also combine all steps into a single workflow, supporting robust performance in challenging conditions.
Here are some deep learning-based approaches for image feature extraction and matching:
-
CNN-based feature extraction: These models automatically learn key visual patterns from large datasets. They recognize features that are unlikely to change, making them reliable for matching objects across different scenes.
-
Embedding-based matching: Instead of directly comparing pixels, this method turns images into compact numerical representations known as embeddings. The matcher then compares these embeddings to find similar visuals. Models like FaceNet, which generates embeddings to recognize and compare faces, and CLIP, which maps images and text into a shared space for tasks like image search and semantic matching, follow this approach.
-
End-to-end matching pipelines: Cutting-edge deep learning systems often combine keypoint detection, description, and matching into a unified workflow. Models like SuperPoint and D2-Net learn both keypoints and descriptors directly from CNN feature maps, while SuperGlue acts as a learned matcher that pairs these descriptors more reliably than traditional methods. Together, these components create an end-to-end pipeline that delivers higher accuracy and greater robustness in challenging conditions than classical feature-based approaches.
-
Transformer-based matching: This method uses attention mechanisms to link corresponding regions across two images, allowing it to align patches even under strong viewpoint, lighting, or texture changes. Models like LoFTR (Local Feature Transformer) achieve much higher accuracy because the Transformer’s global receptive field enables reliable matching in low-texture, blurry, or repetitive areas where traditional detectors fail. LoFTR produces semi-dense, high-confidence matches and outperforms prior state-of-the-art methods by a large margin on both indoor and outdoor benchmarks.
-
Efficiency-focused models: Newer image-matching models aim to deliver high accuracy while running faster. Models like LightGlue are designed to run efficiently on devices with limited computing power while still maintaining good matching quality.
Link to this sectionReal-world applications of image matching#
Now that we have a better understanding of how image matching works, let’s look at some real-world applications where it plays an important role.
Link to this sectionSmarter robotics driven by image matching#
Robots often operate in busy and changing environments, where they need to understand which objects are present and how they are placed. Image matching can help robots understand objects they see by comparing them with stored or reference images. This makes it easier for these robots to recognize objects, track their movement, and adapt even when lighting or camera angles change.
For instance, in a warehouse, a robotic pick-and-place system can use image matching to identify and handle different items. The robot first grabs an object, then compares its image with reference samples to identify it.
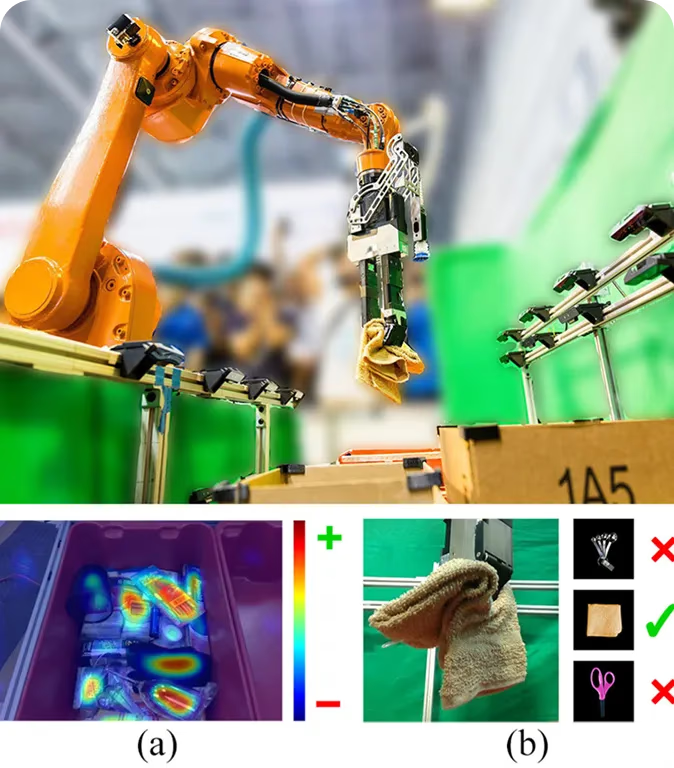
Fig 5. A robot recognizes and picks up objects by matching them with reference images. (Source)
Once the match is found, the robot knows how to sort or place it correctly. This approach allows robots to recognize both familiar and new objects without retraining the entire system. It also helps them make better real-time decisions, like organizing shelves, assembling parts, or rearranging items.
Link to this sectionImproving 3D reconstruction with better image matching#
In areas such as drone mapping, virtual reality, and building inspection, systems often need to reconstruct a 3D model from multiple 2D images. To do this, they rely on image matching to identify common keypoints, like corners or textured regions, that appear across several images.
These shared points help the system understand how the images relate to one another in 3D space. This idea is closely related to Structure from Motion (SfM), a technique that builds 3D structures by identifying and matching keypoints across images captured from different viewpoints.
If the matching isn’t accurate, the resulting 3D model can appear distorted or incomplete. For this reason, researchers have been working to improve the reliability of image matching for 3D reconstruction, and recent advancements have shown promising results.
One interesting example is HashMatch, a faster and more robust image-matching algorithm. HashMatch converts image details into compact patterns called hash codes, which makes it easier to identify correct matches and remove outliers, even when lighting or viewpoints vary.
When tested on large-scale datasets, HashMatch produced cleaner and more realistic 3D reconstruction models with fewer alignment errors. This makes it especially useful for applications like drone mapping, AR systems, and cultural heritage preservation, where precision is critical.
Link to this sectionThe role of image matching in augmented reality#
When it comes to augmented reality (AR), keeping virtual objects aligned with the real world is often a challenge. Outdoor environments can change constantly depending on environmental conditions, such as sunlight and weather. Subtle differences in the real world can make virtual elements appear unstable or slightly out of place.
To solve this issue, AR systems use image matching to interpret their surroundings. By comparing live camera frames with stored reference images, they can understand where the user is and how the scene has changed.

Fig 6. Feature points matched between two images. (Source: theijes.com)
For instance, in a study involving military-style outdoor AR training with XR (Extended Reality) glasses, researchers used SIFT and other feature-based methods to match visual details between real and reference images. Accurate matches kept the virtual elements correctly aligned with the real world, even when the user moved quickly or the lighting changed.
Link to this sectionKey takeaways#
Image matching is a core component of computer vision, enabling systems to understand how different images relate to one another or how a scene changes over time. It plays a critical role in robotics, augmented reality, 3D reconstruction, autonomous navigation, and many other real-world applications where precision and stability are essential.
With advanced AI models like SuperPoint and LoFTR, today’s systems are becoming far more robust than earlier methods. As machine learning techniques, specialized vision modules, neural networks, and datasets continue to advance, image matching will likely become faster, more accurate, and more adaptable.
Join our growing community and explore our GitHub repository for hands-on AI resources. To build with vision AI today, explore our licensing options. Learn how AI in agriculture is transforming farming and how Vision AI in healthcare is shaping the future by visiting our solutions pages.






