Migliorare la previsione delle collisioni con i modelli Ultralytics YOLO
Scopri come gli insight dei modelli Ultralytics YOLO aiutano i sistemi di previsione delle collisioni a prendere decisioni più sicure e rapide in ambienti dinamici.
Nonostante l'attenzione sulla strada, gli incidenti possono comunque accadere. Un'auto cambia corsia, un pedone attraversa fuori dalle strisce o un ciclista accelera senza preavviso. Questi momenti quotidiani sono esempi di quando i sistemi di previsione delle collisioni possono fare davvero la differenza e aiutare a mantenere tutti al sicuro.
In precedenza, abbiamo esaminato la previsione della traiettoria di una palla e abbiamo visto come prevedere il percorso di una palla in rapido movimento aiuti l'analisi sportiva a comprendere il movimento e ad anticipare ciò che accadrà dopo. La previsione delle collisioni funziona in modo simile.
Questi sistemi di previsione guardano essenzialmente al futuro. Osservando come si muovono veicoli e pedoni, possono individuare i rischi in anticipo e regolare il proprio percorso o comportamento prima che le cose prendano una piega pericolosa (noto anche come pianificazione del movimento o pianificazione del percorso).
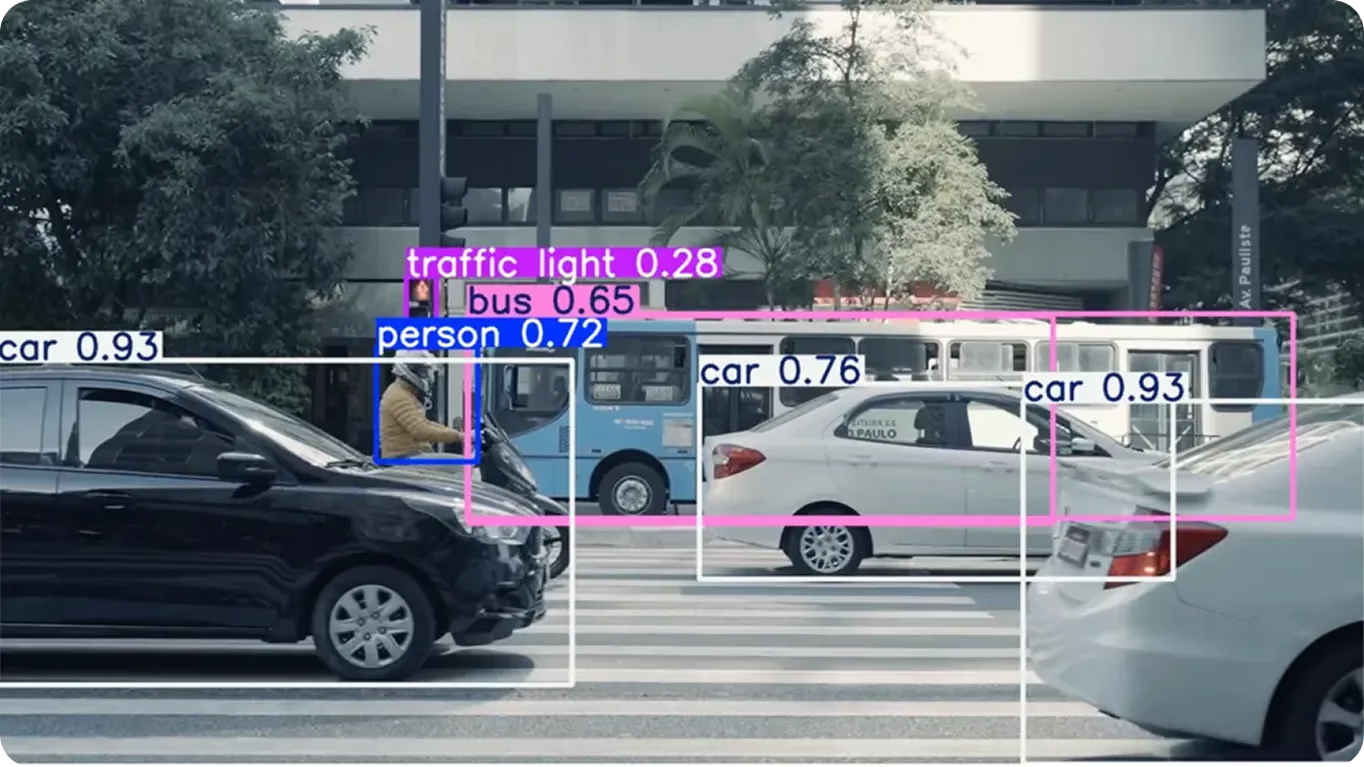
Le tecnologie informatiche chiave alla base dei sistemi di previsione delle collisioni sono l'intelligenza artificiale e i suoi sottocampi, come la computer vision e i metodi di previsione che aiutano a stimare come le cose si muoveranno. Ad esempio, modelli di computer vision come Ultralytics YOLO11 e il prossimo Ultralytics YOLO26 possono essere utilizzati per rilevare e tracciare oggetti come veicoli e pedoni in tempo reale, e i modelli di previsione utilizzano tali intuizioni per stimare i loro movimenti successivi.
Fig 1. Un esempio di YOLO11 utilizzato per rilevare oggetti sulla strada (Fonte).
Il risultato è un sistema di IA che comprende cosa sta accadendo intorno a sé e supporta un processo decisionale più intelligente in ambienti dinamici. In questo articolo, esploreremo come funziona la previsione delle collisioni, i metodi alla base e il ruolo che la computer vision e i modelli YOLO di Ultralytics possono svolgere nel processo. Iniziamo!
Link to this sectionChe cos'è la previsione delle collisioni?#
La previsione delle collisioni è la capacità di un sistema di IA di comprendere come si muovono gli oggetti e di anticipare quando potrebbero avvicinarsi molto o entrare in contatto. Sistemi diversi possono utilizzare queste informazioni in molti modi, tra cui il supporto a funzioni di sicurezza, l'ottimizzazione del movimento o il coordinamento delle azioni in spazi condivisi.
Ovunque gli oggetti si muovano attraverso uno spazio condiviso, che si tratti di auto su un'autostrada, carrelli elevatori nel corridoio di un magazzino o pedoni che attraversano una strada, la previsione delle collisioni aiuta i sistemi a comprendere come queste interazioni possano evolversi. Nelle applicazioni focalizzate sulla sicurezza, questa lungimiranza può essere utilizzata per ridurre il rischio, mentre in altri contesti può supportare attività come la pianificazione del percorso, il tempismo o il movimento coordinato.
Ad esempio, in molti veicoli più recenti dotati di sistemi avanzati di assistenza alla guida, o ADAS, telecamere e sensori monitorano la strada davanti e stimano quanto velocemente l'auto si stia avvicinando agli oggetti vicini. Se il sistema rileva che una situazione potrebbe diventare non sicura, avvisa il conducente e, in alcuni casi, la frenata automatica può aiutare a ridurre l'impatto.
Link to this sectionEsplorare le quattro fasi della previsione delle collisioni#
La previsione delle collisioni comporta un processo coordinato in cui diversi componenti di IA lavorano insieme per identificare gli oggetti, seguirne il movimento e stimare cosa potrebbe accadere dopo. Questi sistemi funzionano tipicamente attraverso quattro fasi connesse: rilevamento degli oggetti, tracciamento degli oggetti, previsione della traiettoria e infine previsione delle collisioni, con ogni fase che si basa sull'accuratezza di quella precedente.
Successivamente, esaminiamo più da vicino come funziona ogni fase.
Link to this sectionUno sguardo al rilevamento degli oggetti#
Il rilevamento degli oggetti è un'attività fondamentale di computer vision in cui i modelli di visione IA identificano e localizzano oggetti in un'immagine o in un fotogramma video. Analizzando i dati dei pixel, un modello di rilevamento degli oggetti può produrre tre output principali: bounding box, classi di oggetti e punteggi di confidenza. I bounding box mostrano dove si trova un oggetto, le classi di oggetti indicano di cosa si tratta, come un'auto, un pedone o un ciclista, e i punteggi di confidenza riflettono quanto il modello sia certo della previsione.
Modelli di visione IA come YOLO11 e YOLO26 si basano su questo fondamento e supportano diverse attività correlate, tra cui il rilevamento degli oggetti, il tracciamento degli oggetti e il rilevamento di bounding box orientati (OBB). Il rilevamento degli oggetti può dire a un sistema di previsione cosa c'è in ogni fotogramma, il tracciamento segue quegli oggetti mentre si muovono e i bounding box orientati forniscono forme più accurate per gli oggetti che appaiono con angolazioni diverse.
In questa fase, un sistema di previsione delle collisioni è focalizzato puramente sul comprendere cosa è presente nei dati visivi. Forma lo strato base di informazioni da cui dipendono tutti i passaggi successivi, ma non considera ancora come gli oggetti si muoveranno o interagiranno.
Link to this sectionUna panoramica del tracciamento degli oggetti#
Una volta rilevati gli oggetti, il passaggio successivo è tracciarli attraverso i fotogrammi in modo che il sistema possa comprendere come si muovono nel tempo. Mentre il rilevamento fornisce nuovi bounding box a ogni fotogramma, il tracciamento degli oggetti aggiunge continuità collegando tali rilevamenti nel tempo.
Gli algoritmi di tracciamento supportati dal pacchetto Python Ultralytics, come ByteTrack o BoT-SORT, lavorano con modelli come YOLO11 utilizzando i dati di rilevamento di ogni fotogramma per seguire gli oggetti mentre si muovono. Questi algoritmi assegnano un ID univoco a ogni oggetto e lo usano per mantenere tale identità anche quando l'oggetto si muove rapidamente o diventa parzialmente nascosto. Ciò crea una cronologia di tracciamento fluida che cattura come l'oggetto si muove.

Fig 2. Uno sguardo all'assegnazione di ID univoci per diversi rilevamenti utilizzando YOLO (Fonte)
Ecco una rapida occhiata a come funzionano questi due metodi di tracciamento:
- ByteTrack: Utilizza rilevamenti ad alta e bassa confidenza per mantenere ID oggetto coerenti, con le previsioni di movimento di un filtro di Kalman che aiutano il tracker a rimanere stabile quando gli oggetti si muovono rapidamente o sono brevemente difficili da rilevare.
- BoT-SORT: Questo algoritmo estende SORT combinando le previsioni di movimento del filtro di Kalman con spunti di aspetto, consentendo al tracker di seguire gli oggetti in modo più affidabile in scene affollate o durante l'occlusione parziale.
Per misurare le prestazioni di questi metodi di tracciamento, i ricercatori li valutano su set di dati e benchmark di tracciamento multi-oggetto (MOT) stabiliti. Inoltre, le metriche comunemente utilizzate includono l'accuratezza del tracciamento multi-oggetto (MOTA), che riflette la qualità complessiva del tracciamento; il punteggio F1 di identificazione (IDF1), che misura quanto coerentemente vengono mantenute le identità degli oggetti; e l'accuratezza del tracciamento di ordine superiore (HOTA), che offre una visione equilibrata sia delle prestazioni di rilevamento che dell'accuratezza dell'associazione.
Link to this sectionComprendere la previsione della traiettoria#
Dopo aver tracciato un oggetto attraverso più fotogrammi, il passaggio successivo è prevedere dove andrà dopo. Questa è nota come previsione della traiettoria. Mentre il rilevamento trova gli oggetti e il tracciamento segue come si muovono, la previsione guarda avanti e stima le loro posizioni future.
Le informazioni derivanti dal rilevamento e dal tracciamento, come il bounding box di un oggetto, la posizione tra i fotogrammi e l'ID assegnato, possono essere utilizzate per calcolare caratteristiche di movimento come velocità, direzione e schemi di movimento. Queste intuizioni derivate forniscono al modello di previsione i dati necessari per stimare dove è probabile che si trovi l'oggetto nei prossimi secondi.
Nei casi in cui i dati di tracciamento contengono lacune o salti bruschi, le tecniche di interpolazione aiutano a ricostruire traiettorie più fluide e coerenti. Ciò garantisce che il modello di previsione riceva input di movimento di alta qualità piuttosto che dati di posizione rumorosi o incompleti.
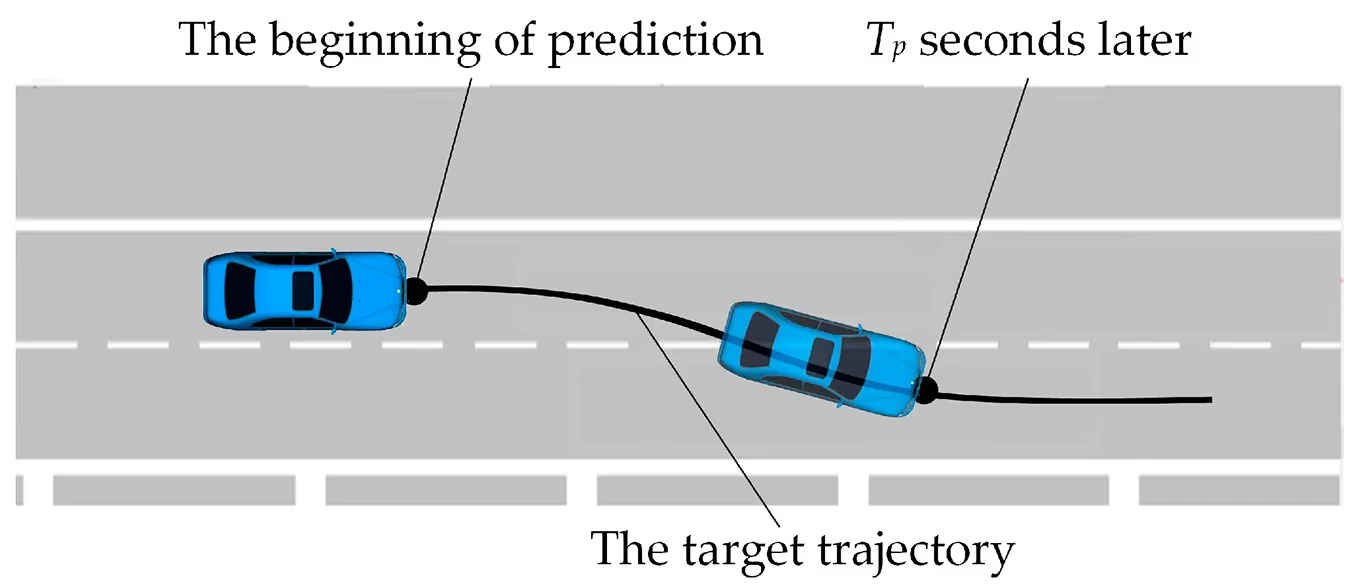
Fig 3. Una visualizzazione della previsione della traiettoria di un'auto. (Fonte)
Per fare queste previsioni, molti sistemi si affidano a modelli di deep learning progettati per comprendere come cambia il movimento di un oggetto nel tempo. Analizzando sequenze di posizioni passate e le caratteristiche di movimento derivate da esse, questi modelli apprendono schemi di movimento comuni e utilizzano tale conoscenza per prevedere percorsi futuri.
Ecco alcuni approcci di deep learning e machine learning comunemente utilizzati per la previsione della traiettoria:
-
Reti Neurali Ricorrenti (RNN): Le RNN sono modelli di deep learning progettati per lavorare con sequenze, come una serie di fotogrammi video. Possono mantenere una memoria delle posizioni precedenti e utilizzare tali informazioni per comprendere come si è mosso un oggetto. Ciò aiuta il sistema a riconoscere semplici schemi di movimento come accelerare, rallentare o muoversi in linea retta.
-
Reti a Memoria a Lungo Termine (LSTM): Le LSTM sono un tipo più avanzato di RNN in grado di ricordare informazioni per periodi più lunghi. Ciò consente loro di catturare movimenti più complessi, come un veicolo che si prepara a svoltare o un pedone che cambia direzione. Poiché possono tracciare tendenze più lunghe, spesso producono previsioni più affidabili in ambienti affollati.
-
Transformer: I Transformer elaborano sequenze di movimento complete e utilizzano l'attenzione per concentrarsi sui dettagli più importanti di tali sequenze. Ciò li rende particolarmente efficaci in scene in cui più oggetti interagiscono, come auto che si immettono o pedoni che attraversano.
Questi modelli possono prevedere percorsi sia a breve che a lungo termine. Le previsioni a breve termine, solitamente inferiori a due secondi, tendono a essere le più accurate, mentre le previsioni su finestre più lunghe, come da due a sei secondi, forniscono maggiore lungimiranza ma comportano una maggiore incertezza.
Link to this sectionMettere tutto insieme: algoritmi di rilevamento delle collisioni#
Nella fase finale, la previsione delle collisioni, il sistema utilizza tutto ciò che ha appreso finora: cos'è ogni oggetto (rilevamento), come si è mosso (tracciamento) e dove è probabile che vada dopo (previsione). Questo passaggio verifica se uno qualsiasi dei percorsi previsti potrebbe intersecarsi in un modo che potrebbe portare a una collisione.
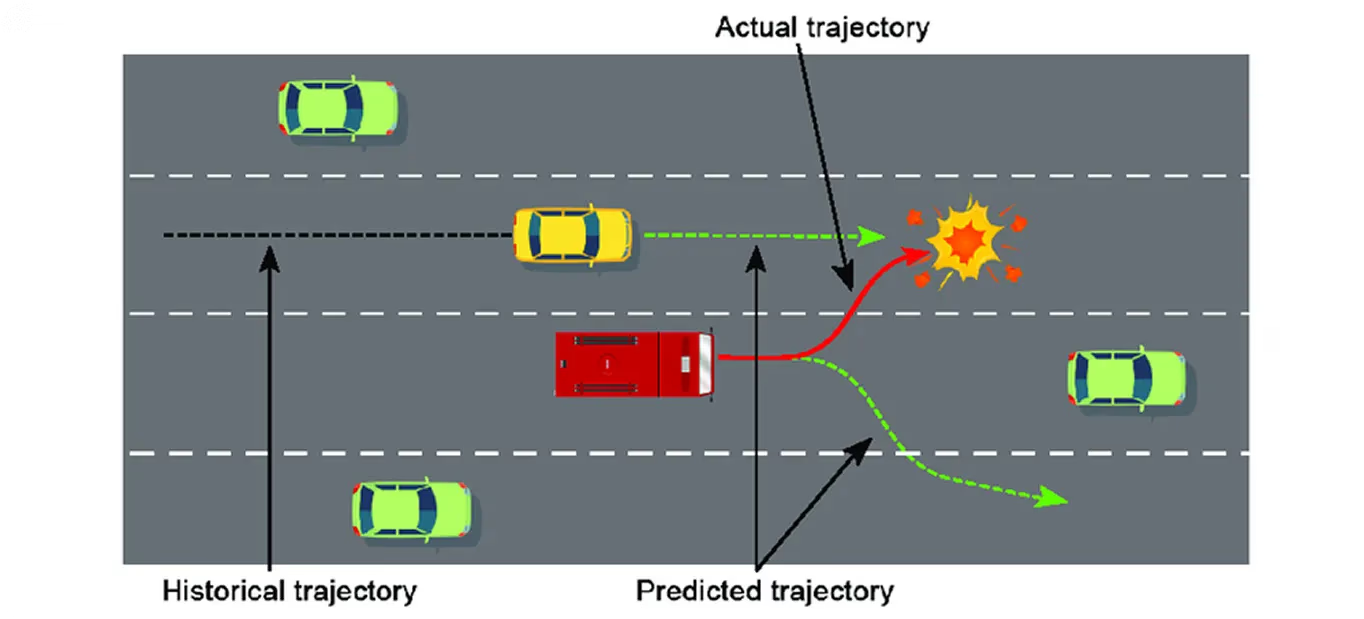
Fig 4. Come funziona un sistema di previsione delle collisioni (Fonte)
Nel caso dei veicoli autonomi, un sistema di controllo delle collisioni confronta le traiettorie future di oggetti vicini come auto, pedoni e ciclisti. Se due percorsi previsti si sovrappongono o si avvicinano pericolosamente, contrassegna la situazione come una potenziale collisione di veicoli. Per comprendere quanto possa essere urgente il rischio di collisione, il sistema calcola anche un valore noto come tempo alla collisione.
Il tempo alla collisione (TTC) è una misura chiave in ambienti in rapido movimento. Stima quanto tempo rimane prima che due oggetti si scontrino se continuano alle loro velocità e direzioni attuali. Quando il TTC scende al di sotto di una certa soglia, il sistema può rispondere emettendo avvisi, azionando i freni o regolando il percorso pianificato.
Link to this sectionApplicazioni nel mondo reale della previsione delle collisioni#
La previsione delle collisioni sta diventando cruciale in molti settori, tra cui la gestione del traffico, l'infrastruttura di città intelligenti, l'automazione industriale e la robotica mobile. Poiché i modelli di computer vision e di previsione all'avanguardia continuano ad avanzare, questi sistemi stanno diventando più capaci di anticipare il movimento.
Ora che abbiamo una migliore comprensione di come funzionano la previsione delle collisioni e la previsione della traiettoria, diamo un'occhiata ad alcuni interessanti studi di ricerca che mostrano come questi metodi possano essere utilizzati in vari ambienti del mondo reale.
Link to this sectionPrevisione delle collisioni potenziata da YOLO per veicoli autonomi di emergenza#
Navigare in ambienti affollati e imprevedibili è una delle sfide più difficili per i sistemi autonomi, specialmente quando i pedoni si muovono in modi che non seguono schemi chiari. I veicoli di emergenza affrontano questo problema ancora più spesso, poiché devono muoversi rapidamente a velocità elevate attraverso spazi pubblici densi senza fare affidamento su strade strutturate, segnaletica orizzontale o comportamento prevedibile dei pedoni.
In questi tipi di scenari, comprendere dove si trovano le persone e come potrebbero muoversi nei prossimi secondi diventa essenziale per evitare incidenti. Ad esempio, un recente studio di ricerca ha esplorato questa sfida costruendo una pipeline di previsione delle collisioni completa per un veicolo autonomo di emergenza (EAV) che opera in ambienti ricchi di pedoni.
Link to this sectionCome funziona la pipeline di previsione delle collisioni potenziata da YOLO#
Ecco una panoramica di come funziona questa metodologia:
- Rilevamento dei pedoni utilizzando YOLO: Un rilevatore basato su YOLO identifica i pedoni in ogni fotogramma della telecamera ed emette bounding box per ogni persona visibile.
- Tracciamento del movimento con ByteTrack: L'algoritmo ByteTrack collega questi rilevamenti attraverso i fotogrammi, dando a ogni pedone un ID coerente e creando una cronologia di movimento che mostra come si stanno muovendo nel tempo.
- Stima della posizione nel mondo reale: La mappatura prospettica inversa (IPM) converte le coordinate dei pixel 2D in posizioni approssimative del piano terra, aiutando il sistema a comprendere dove si trovano i pedoni nello spazio reale rispetto al veicolo.
- Generazione della vista dall'alto utilizzando una cGAN: Una GAN condizionale, un modello di IA che traduce un formato immagine in un altro, crea una rappresentazione dall'alto della scena. Questo layout dall'alto rende più facile interpretare le posizioni dei pedoni e l'ambiente circostante.
- Previsione della traiettoria con un modello LSTM: Utilizzando le posizioni passate e gli schemi di movimento di ogni pedone, un modello LSTM prevede dove è probabile che si muovano nei prossimi secondi.
- Rilevamento efficiente delle collisioni utilizzando coni di collisione: Le traiettorie previste vengono confrontate utilizzando il metodo dei coni di collisione, che determina se i percorsi del veicolo e di qualsiasi pedone sono in rotta di collisione.
- Prevenzione delle collisioni tramite segnalazione: Se il sistema prevede una collisione, attiva un segnale acustico (come un clacson o un campanello) al momento ottimale. Il tempismo viene scelto per influenzare il comportamento del pedone e dargli la possibilità di accelerare o rallentare e mettersi al sicuro.
Link to this sectionGarantire la sicurezza dei pedoni nelle città utilizzando la visione edge e YOLO#
Allo stesso modo, un altro approccio alla prevenzione delle collisioni guarda oltre i veicoli e si concentra sull'infrastruttura stessa. Invece di fare affidamento su sensori all'interno di un'auto, questo metodo utilizza telecamere intelligenti installate su strisce pedonali e incroci per monitorare come si muovono pedoni e veicoli in tempo reale. Queste posizioni sono spesso imprevedibili; le persone possono entrare in strada improvvisamente, i ciclisti possono zigzagare nel traffico e i conducenti potrebbero non rallentare sempre, quindi rilevare i rischi in anticipo è vitale.
Un interessante studio ha esplorato questa idea attraverso un sistema chiamato NAVIBox, un dispositivo di visione edge progettato per prevedere i rischi veicolo-pedone direttamente all'incrocio. Il sistema utilizza il modello Ultralytics YOLOv8 per rilevare pedoni e veicoli e un leggero tracker del centroide per seguirli attraverso i fotogrammi. Ciò crea cronologie di movimento brevi e affidabili, che vengono poi perfezionate utilizzando una trasformazione prospettica che converte la vista angolata della telecamera CCTV in un layout stradale più chiaro visto dall'alto.
Con queste traiettorie perfezionate, NAVIBox può stimare come è probabile che gli utenti della strada si muovano nei prossimi secondi e verificare se i loro percorsi potrebbero intersecarsi (noto anche come test di intersezione). Quando il sistema rileva un'interazione rischiosa, invia immediatamente avvisi tramite display per i conducenti e altoparlanti per i pedoni, senza fare affidamento su un server remoto o una connessione di rete. I test in luoghi urbani reali hanno mostrato che NAVIBox funziona abbastanza velocemente per una risposta in tempo reale e può identificare accuratamente potenziali scenari di collisione, rendendolo uno strumento di sicurezza pratico per gli incroci cittadini affollati.
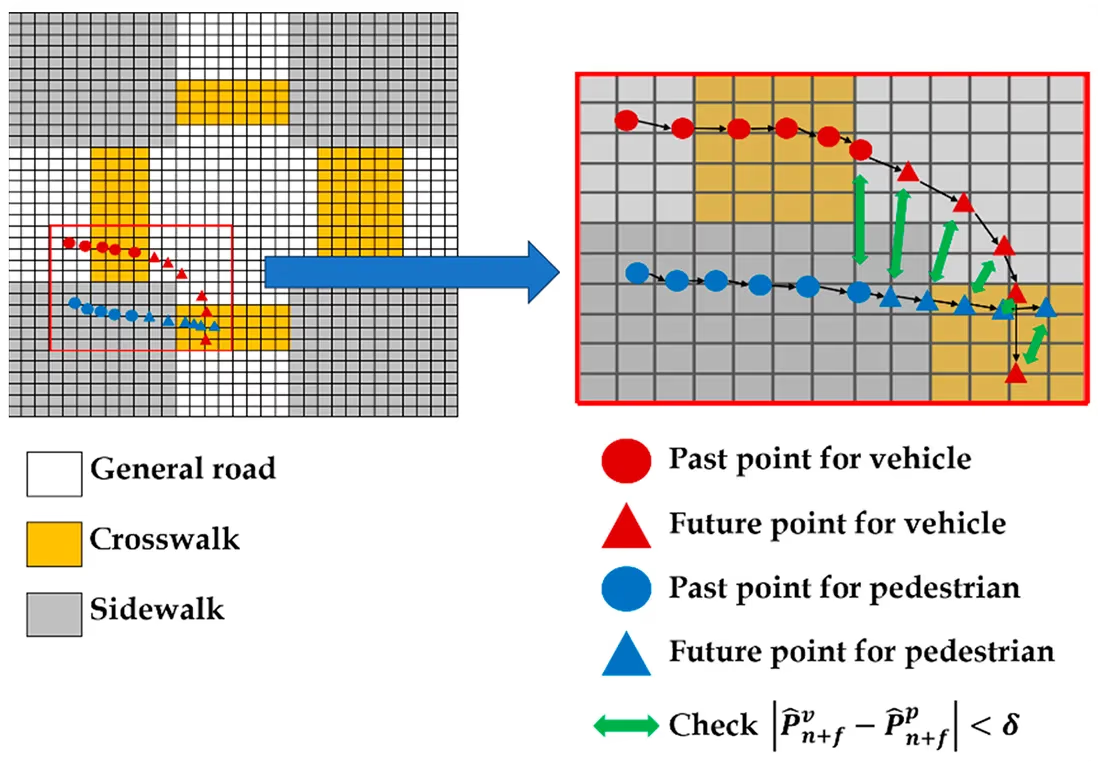
Fig 5. Previsione del rischio di collisione tra veicoli e pedoni. (Fonte)
Link to this sectionPro e contro del rilevamento e della previsione delle collisioni#
Ecco alcuni vantaggi dell'utilizzo di sistemi di collisione predittiva basati su IA:
-
Migliora la consapevolezza situazionale: I sistemi di IA mappano continuamente come si muovono gli oggetti in un ambiente, fornendo una comprensione più ricca del flusso di folla su larga scala, del comportamento del traffico o dei percorsi delle macchine.
-
Intuizioni basate sui dati per la pianificazione a lungo termine: Registrando rilevamenti, mancati incidenti e schemi di movimento, i sistemi di IA forniscono analisi che gli urbanisti, i team di sicurezza e gli operatori di flotte possono utilizzare per riprogettare incroci, migliorare la segnaletica o perfezionare le politiche operative.
-
Prevenzione dei rischi conveniente: Rilevando i rischi prima che si intensifichino, questi sistemi possono rendere possibile evitare incidenti costosi, richieste di risarcimento assicurativo o riparazioni di attrezzature.
Nonostante i suoi vantaggi, i sistemi a prova di collisione affrontano anche alcune limitazioni. Ecco alcune sfide da considerare:
- Vincoli di posizionamento di sensori e telecamere: Telecamere posizionate o angolate male possono distorcere le dimensioni o la distanza dell'oggetto, rendendo meno affidabili la stima della profondità e la previsione della traiettoria.
- Occlusione: Gli oggetti possono essere nascosti parzialmente o totalmente dietro altri. Ciò rende difficile il tracciamento degli oggetti poiché il modello perde la continuità visiva.
- Condizioni ambientali: Scarsa illuminazione, sole forte, pioggia, nebbia o scarsa qualità della telecamera possono ridurre la capacità del modello di vedere chiaramente la scena, influenzando l'accuratezza.
Link to this sectionPunti chiave#
La previsione delle collisioni unisce due potenti capacità: la computer vision, che consente ai sistemi di comprendere cosa sta succedendo nell'ambiente in questo momento, e la previsione della traiettoria, che li aiuta ad anticipare cosa è probabile che accada dopo.
Combinando questi punti di forza, le macchine possono rilevare oggetti in movimento in tempo reale e prevedere come tali oggetti potrebbero interagire nei secondi successivi. Poiché le tecniche di computer vision e di previsione continuano a evolversi, la previsione delle collisioni diventerà probabilmente fondamentale per costruire sistemi autonomi più sicuri, più affidabili e scalabili.
Dai un'occhiata alla nostra comunità e al nostro repository GitHub per saperne di più sull'IA. Esplora applicazioni come IA nell'assistenza sanitaria e computer vision nella produzione sulle nostre pagine delle soluzioni. Scopri le nostre opzioni di licenza e inizia a costruire oggi stesso!






