OBB 객체 탐지를 위해 Ultralytics YOLO11을 사용하는 방법
Ultralytics YOLO11이 회전된 경계 상자(OBB)를 사용하여 객체 탐지를 어떻게 향상할 수 있는지, 그리고 이 컴퓨터 비전 작업이 어떤 애플리케이션에 이상적인지 알아보세요.
Ultralytics’ annual hybrid event, YOLO Vision 2024 (YV24), focused on discussing the latest breakthroughs in AI and computer vision. This was the perfect occasion to introduce our newest model, Ultralytics YOLO11. The model supports the same computer vision tasks as Ultralytics YOLOv8, making the shift to the new model effortless for users.
기존에 YOLOv8을 사용하여 다양한 각도의 객체를 탐지하기 위한 OBB(회전된 경계 상자) 객체 탐지를 수행하고 있었다면, 이제 코드에 약간의 수정만 거쳐 YOLO11로 전환할 수 있습니다. 또한 정확도와 효율성 향상부터 처리 속도 개선에 이르기까지 YOLO11의 향상된 기능을 누릴 수 있습니다. 아직 YOLO11과 같은 모델을 사용해 본 적이 없다면, OBB 탐지는 YOLO11이 어떻게 적용될 수 있는지를 보여주는 훌륭한 사례이며, 실질적인 영향을 미치는 실용적인 솔루션을 제공합니다.
본 게시물에서는 OBB 객체 탐지란 무엇인지, 어디에 적용될 수 있는지, 그리고 YOLO11을 사용하여 OBB를 탐지하는 방법을 살펴봅니다. 또한 YOLO11의 새로운 기능이 이러한 프로세스를 어떻게 개선할 수 있는지, 그리고 OBB 탐지 기능을 최대한 활용하기 위해 추론을 실행하고 커스텀 모델을 학습시키는 방법에 대해서도 자세히 알아봅니다.
Link to this section차세대 YOLO11 기능에는 OBB 객체 탐지와 같은 태스크가 포함됩니다.#
OBB 객체 탐지는 기존 객체 탐지를 한 단계 더 발전시켜 다양한 각도에서 객체를 탐지합니다. 이미지 축에 맞춰 정렬되는 일반적인 경계 상자와 달리, OBB는 객체의 방향에 맞춰 회전합니다. OBB 객체 탐지는 객체가 항상 곧게 서 있지 않은 항공 또는 위성 이미지를 분석하는 데 사용할 수 있습니다. 도시 계획, 에너지, 교통과 같은 산업 분야에서 건물, 차량 또는 인프라와 같이 기울어진 객체를 정확하게 탐지하는 능력은 실질적인 이점을 제공하는 컴퓨터 비전 애플리케이션의 기반이 될 수 있습니다.
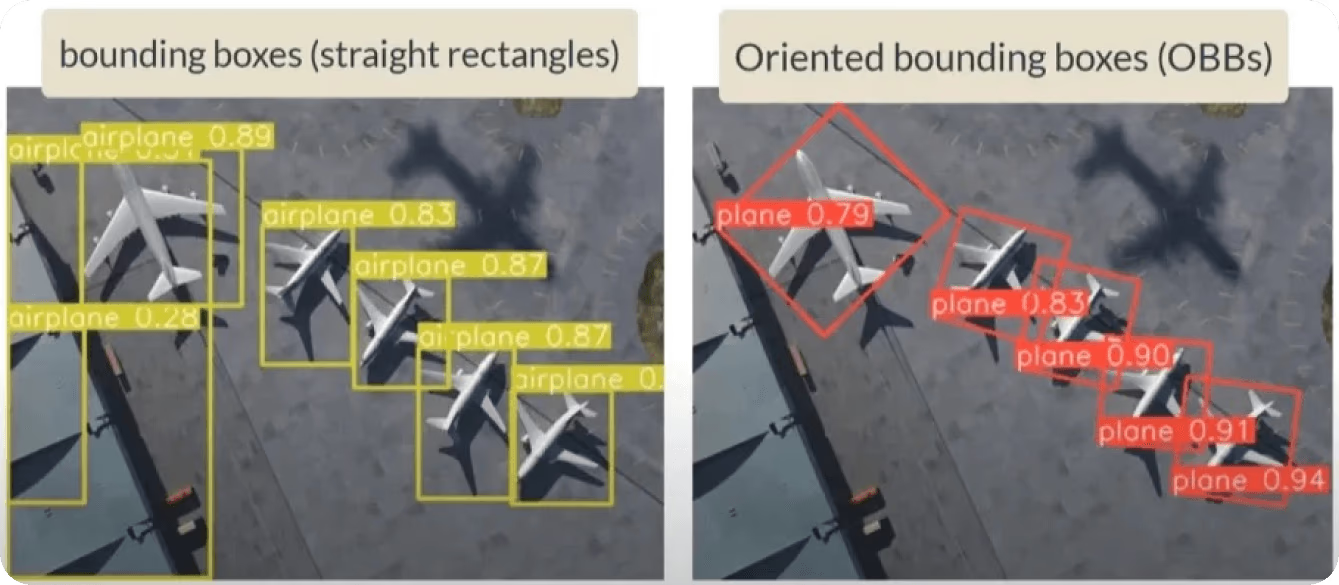
그림 1. 일반 경계 상자와 회전된 경계 상자 비교.
YOLO11은 OBB 탐지를 지원하며, DOTA v1.0 데이터셋으로 학습되어 비행기, 선박, 저장 탱크와 같은 객체를 다양한 관점에서 탐지할 수 있습니다. YOLO11은 여러 모델 변형으로 제공되어 YOLO11n-obb(Nano), YOLO11s-obb(Small), YOLO11m-obb(Medium), YOLO11l-obb(Large), YOLO11x-obb(Extra Large) 등 다양한 요구 사항을 충족합니다. 각 모델은 서로 다른 크기를 제공하며 속도, 정확도 및 계산 능력 수준이 다릅니다. 사용자는 자신의 애플리케이션에 적합한 속도와 정확도의 균형을 제공하는 모델을 선택할 수 있습니다.
Link to this section탐지에 새로운 관점을 제시하는 YOLO11 활용 사례#
YOLO11의 객체 탐지 기능, 특히 회전된 경계 상자에 대한 지원은 다양한 산업에 더 높은 정밀도를 제공합니다. 다음으로, YOLO11과 OBB 탐지가 실제 상황에서 어떻게 사용되어 다양한 분야의 프로세스를 더 효율적이고 정확하며 관리하기 쉽게 만드는지에 대한 몇 가지 예를 살펴보겠습니다.
Link to this sectionYOLO11을 이용한 도시 계획 및 인프라 모니터링#
도시의 디자인과 배치에 감탄한 적이 있다면, 이는 도시 계획과 인프라 모니터링의 세밀한 작업 덕분입니다. 인프라 모니터링의 여러 측면 중 하나는 저장 탱크, 파이프라인, 산업 현장과 같은 중요한 구조물을 식별하고 관리하는 것입니다. YOLO11은 도시 계획가들이 항공 이미지를 분석하여 이러한 핵심 구성 요소를 빠르고 정확하게 탐지하도록 도울 수 있습니다.
회전된 경계 상자 객체 탐지는 다양한 각도에서 본 객체(항공 이미지에서 흔히 발생하는 경우)를 탐지할 수 있게 해주므로 특히 유용합니다. 산업 구역을 추적하고, 환경 영향을 관리하며, 인프라가 제대로 유지 관리되도록 보장하려면 정밀도가 필수적입니다. OBB는 탐지 프로세스를 더욱 안정적으로 만들어 계획가들이 도시의 성장, 안전, 그리고 지속 가능성에 대해 정보에 입각한 결정을 내리도록 돕습니다. YOLO11을 사용하면 도시를 원활하게 운영하는 인프라를 모니터링하고 관리할 수 있습니다.

그림 2. 항공 영상에서 저장 탱크를 탐지하기 위한 YOLO11 사용.
Link to this section드론, YOLO11 및 엣지 AI를 이용한 태양광 패널 검사#
재생 에너지와 태양광 발전소와 같은 혁신 기술이 더욱 대중화됨에 따라 정기적인 검사의 중요성이 커지고 있습니다. 태양광 패널은 효율적으로 작동하는지 확인하기 위해 점검해야 합니다. 시간이 지남에 따라 균열, 먼지 쌓임 또는 정렬 불량과 같은 문제로 인해 성능이 저하될 수 있습니다. 정기적인 검사는 이러한 문제를 조기에 발견하여 유지 관리를 통해 지속적으로 원활하게 운영되도록 합니다.
예를 들어, 엣지 AI와 통합된 드론과 YOLO11을 사용하여 태양광 패널의 손상 여부를 검사할 수 있습니다. 엣지에서 이미지를 분석하면 검사 프로세스에 더 큰 정밀도와 효율성을 가져다줍니다. 드론의 움직임과 관점으로 인해 감시 영상은 종종 다양한 각도에서 태양광 패널을 포착할 수 있습니다. 이러한 경우 YOLO11의 OBB 탐지는 드론이 태양광 패널을 정확하게 식별하도록 도울 수 있습니다.
Link to this sectionYOLO11은 차량 관리 및 물류를 위한 통찰력을 제공할 수 있습니다#
항만과 항구는 매주 수백 척의 선박을 처리하며, 이렇게 대규모 선단을 관리하는 것은 어려울 수 있습니다. 항공 이미지에서 선박을 분석할 때는 선박이 종종 다양한 각도로 나타나기 때문에 어려움이 가중됩니다. 이 지점에서 YOLO11의 OBB 탐지 지원이 유용하게 사용됩니다.
OBB 탐지를 사용하면 표준 직사각형 상자보다 더 정확하게 다양한 각도에서 선박을 탐지할 수 있습니다. OBB가 포함된 YOLO11을 사용하면 해운 회사는 선단의 위치와 상태를 더 쉽게 파악하고 선단 이동 및 공급망 물류와 같은 중요한 세부 정보를 추적할 수 있습니다. 이러한 비전 기반 솔루션은 경로를 최적화하고 지연을 줄이며 해운 경로 전반의 전체적인 선단 관리를 개선하는 데 도움을 줍니다.

그림 3. 기울어진 선박과 항구를 탐지하기 위한 YOLO11 사용.
Link to this sectionAI 개발자를 위한 YOLO11: 회전된 경계 상자 탐지#
OBB 탐지를 위해 YOLO11을 사용하려는 AI 개발자라면, 시작할 수 있는 두 가지 쉬운 옵션이 있습니다. 코드 작업을 편하게 느끼신다면 Ultralytics Python 패키지가 좋은 선택입니다. 클라우드 학습 기능을 갖춘 사용자 친화적인 노코드 솔루션을 선호하신다면 Ultralytics HUB가 바로 그 목적을 위해 설계된 사내 플랫폼입니다. 자세한 내용은 Ultralytics HUB를 사용하여 Ultralytics YOLO11을 학습 및 배포하는 방법에 대한 가이드를 참조하십시오.
이제 YOLO11의 OBB 지원이 적용될 수 있는 사례들을 살펴보았으니, Ultralytics Python 패키지를 살펴보고 이를 사용하여 추론을 실행하고 커스텀 모델을 학습하는 방법을 알아보겠습니다.
Link to this sectionYOLO11을 사용한 추론(Inference) 실행#
먼저, Python에서 YOLO11을 사용하려면 Ultralytics 패키지를 설치해야 합니다. 선호도에 따라 pip, conda 또는 Docker를 사용하여 설치할 수 있습니다. 단계별 지침은 Ultralytics 설치 가이드를 참조하십시오. 설치 중 문제가 발생하면 공통 문제 가이드에서 유용한 문제 해결 팁을 확인할 수 있습니다.
Ultralytics 패키지를 설치한 후에는 YOLO11을 사용하는 과정이 매우 간단합니다. 추론을 실행한다는 것은 학습된 모델을 사용하여 실시간으로 OBB를 통해 객체를 탐지하는 것과 같이 새로운 이미지에서 예측을 수행하는 프로세스를 의미합니다. 이는 모델이 새로운 객체를 인식하도록 가르치거나 특정 태스크에서의 성능을 향상시키는 모델 학습과는 다릅니다. 추론은 모델을 학습되지 않은 데이터에 적용하고 싶을 때 사용됩니다.
아래 예제는 모델을 로드하고 이를 사용하여 이미지에서 회전된 경계 상자를 예측하는 방법을 안내합니다. 더 자세한 예제와 고급 사용 팁은 모범 사례 및 추가 지침을 위해 공식 Ultralytics 문서를 확인하십시오.
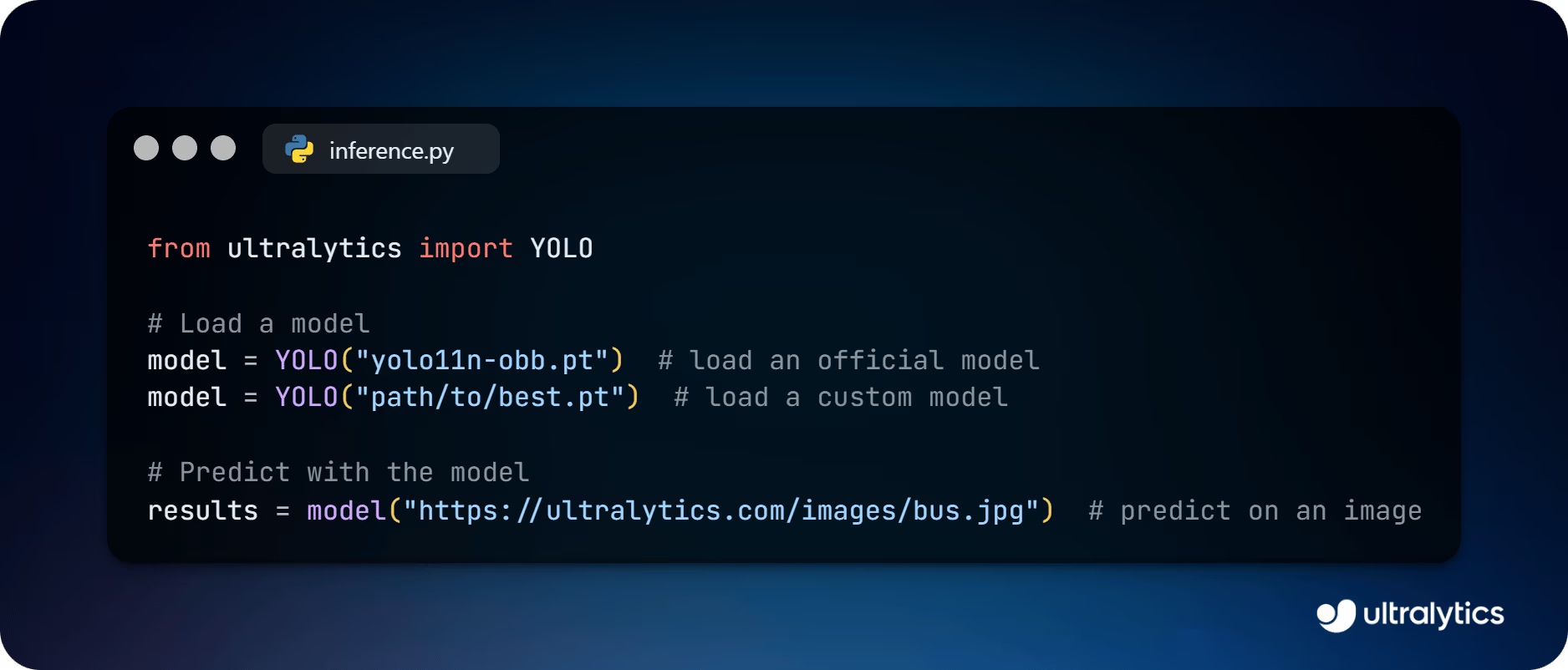
그림 4. YOLO11을 사용하여 추론을 실행하는 모습을 보여주는 코드 스니펫.
Link to this section사용자 지정 YOLO11 모델 훈련#
Training a YOLO11 model means you can fine-tune its performance on specific datasets and tasks, such as oriented bounding box object detection. While pre-trained models like YOLO11 can be used for general object detection, training a custom model is essential when you need the model to detect unique objects or optimize performance on a specific dataset.
아래 코드 스니펫에서는 OBB 탐지를 위해 YOLO11 모델을 학습시키는 단계를 다룹니다.
First, the model is initialized using pre-trained YOLO11 OBB-specific weights (yolo11n-obb.pt). Then, a training function is used to train the model on a custom dataset, with parameters such as the dataset configuration file, the number of training cycles, the training image size, and the hardware to run the training on (e.g., CPU or GPU). After training, the model's performance is validated to check metrics such as accuracy and loss.
Using the trained model, you can run inferences on new images to detect objects with OBB and visualize them. Also, the trained model can be converted to formats like ONNX for deployment using the export feature.
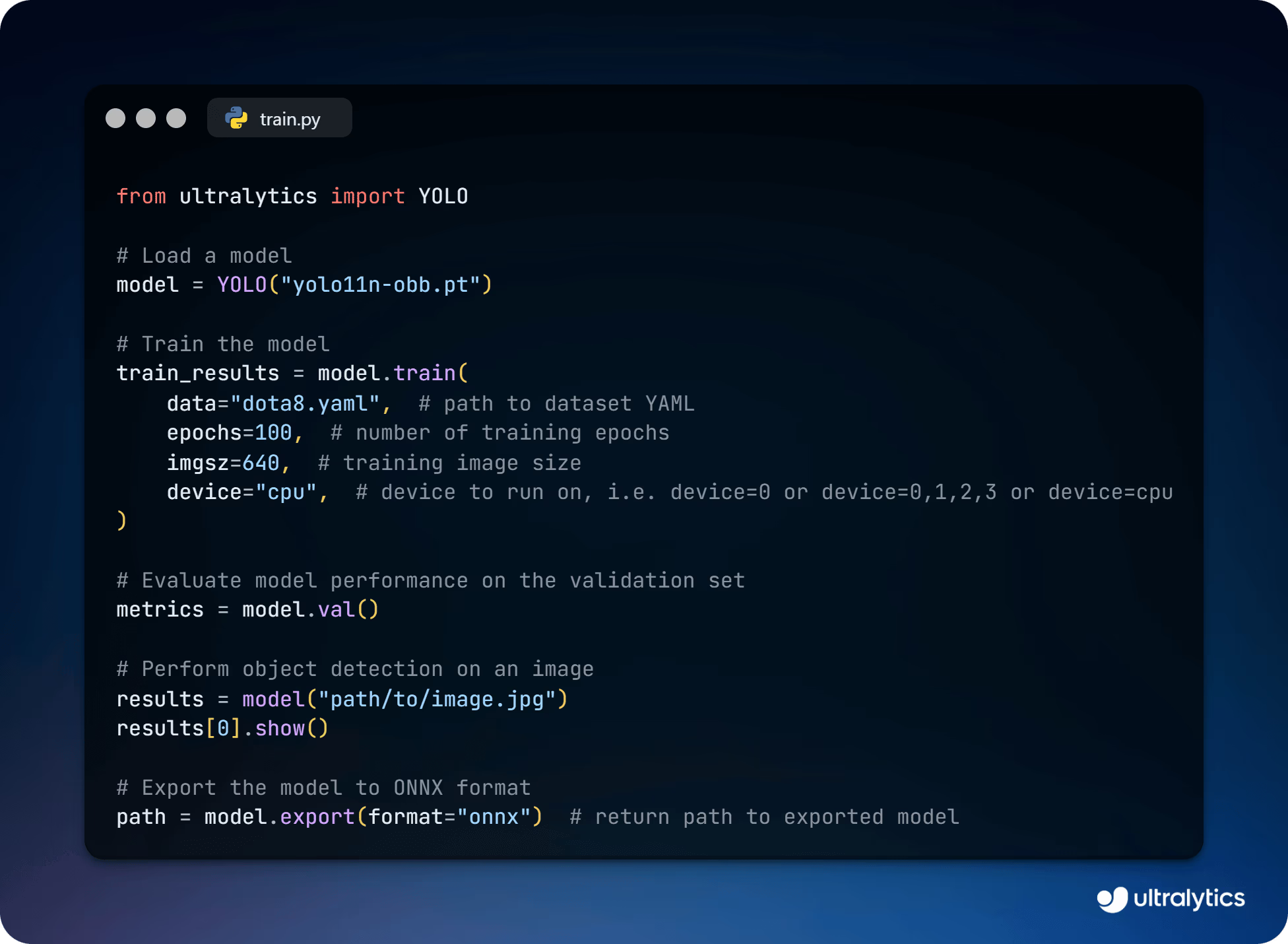
그림 5. OBB 객체 탐지를 위해 YOLO11을 학습시키는 예제.
Link to this sectionYOLO11 AI 발전을 향한 길#
Ultralytics YOLO11은 회전된 경계 상자 지원을 통해 객체 탐지를 한 단계 더 끌어올렸습니다. 다양한 각도에서 객체를 탐지할 수 있게 됨으로써 YOLO11은 다양한 산업 전반에서 여러 애플리케이션에 사용될 수 있습니다. 예를 들어, 태양광 패널 검사나 선단 모니터링과 같은 태스크에 정밀도가 매우 중요한 도시 계획, 에너지, 해운과 같은 산업에 완벽하게 적합합니다. 더 빠른 성능과 향상된 정확도를 통해 YOLO11은 AI 개발자가 실제 당면한 문제를 해결하도록 도울 수 있습니다.
AI가 점점 더 널리 채택되고 일상생활에 통합됨에 따라, YOLO11과 같은 모델은 AI 솔루션의 미래를 만들어갈 것입니다.
비전 AI의 잠재력에 대해 배우려면 저희의 성장하는 커뮤니티에 가입하고 GitHub 저장소를 살펴보십시오. 저희는 의료부터 자율 주행 자동차까지 여러 분야를 재창조하며 혁신을 이끌고 있습니다.






