Robotics
AI와 컴퓨터 비전이 현대 로봇 공학을 어떻게 구동하는지 알아보십시오. 실시간 인식, 자율성 및 지능형 자동화를 위해 Ultralytics YOLO26을 배포하는 방법을 배우십시오.
로봇 공학은 공학, 컴퓨터 과학 및 기술의 융합 지점에 위치한 학제 간 분야로, 로봇이라 불리는 프로그래밍 가능한 기계의 설계, 구축 및 운영을 전문으로 합니다. 전통적인 로봇 공학이 반복적이고 미리 프로그래밍된 기계적 작업에 중점을 두었다면, 현대의 환경은 인공지능(AI)과 머신러닝(ML)의 통합으로 근본적으로 변화했습니다. 이러한 시너지를 통해 기계는 센서를 통해 환경을 인식하고, 자율적인 결정을 내리며, 상호 작용을 통해 학습할 수 있게 되었으며, 단순한 자동화 도구에서 복잡하고 구조화되지 않은 실제 상황을 탐색할 수 있는 지능형 에이전트로 진화하고 있습니다.
Link to this section로봇 공학에서의 인식 및 자율성#
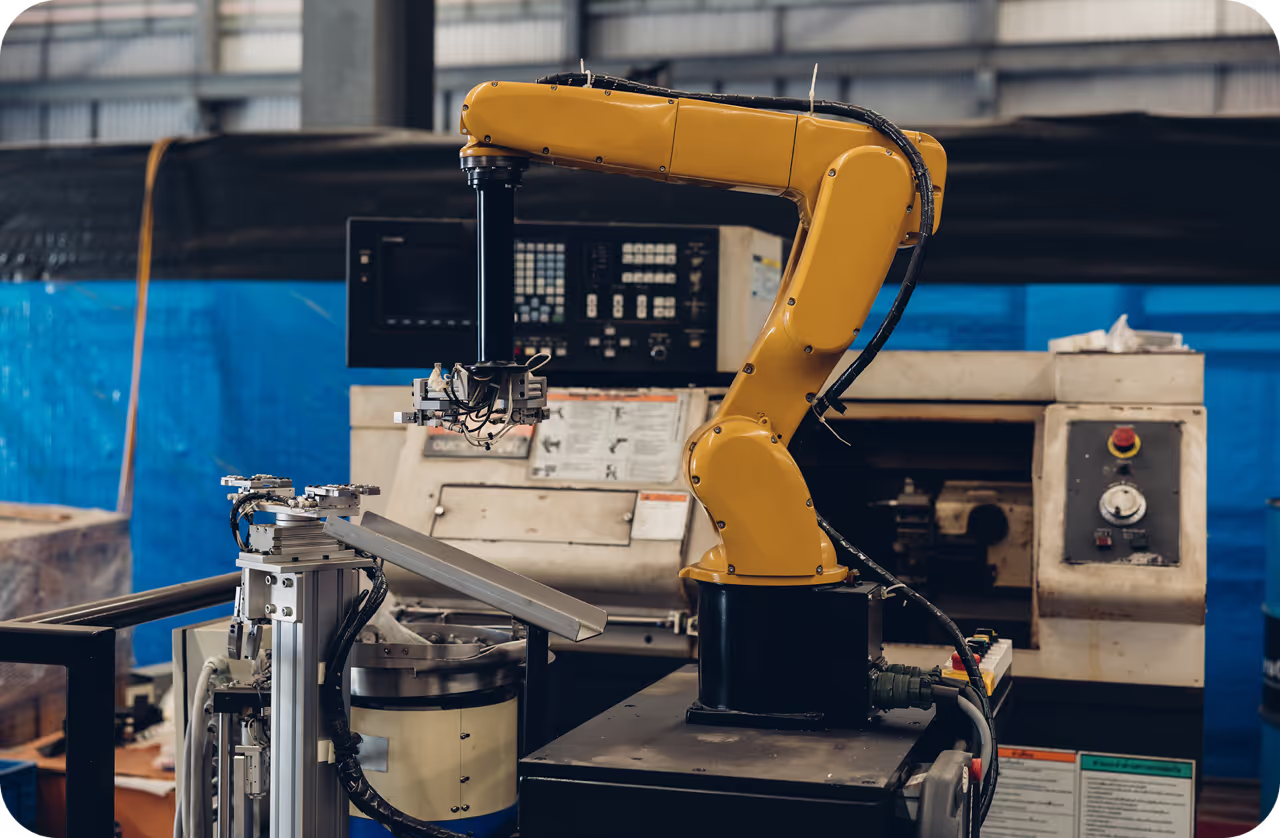
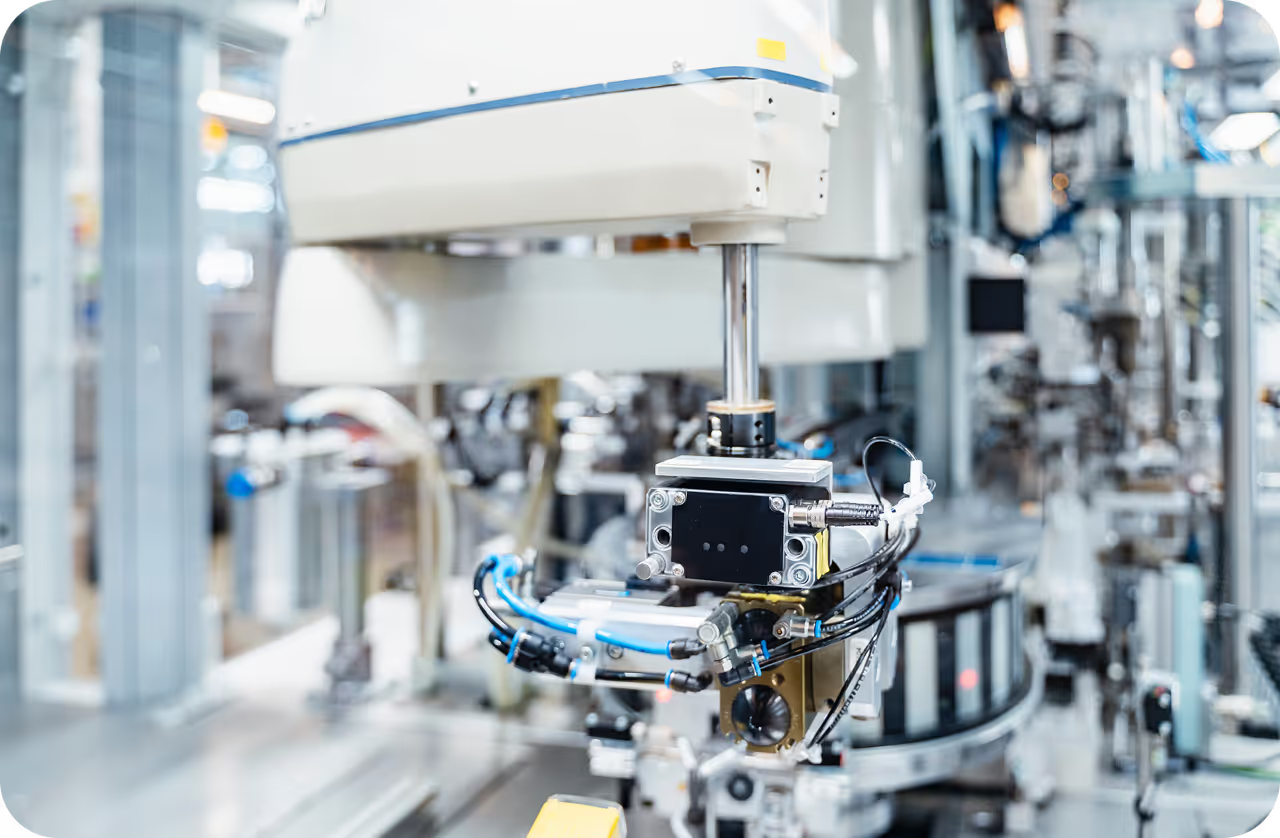
For a robot to operate effectively outside a controlled cage, it must possess "perception"—the ability to interpret sensory data. Computer Vision (CV) acts as the primary sensory modality, processing visual inputs from cameras, LiDAR, and depth sensors. Advanced deep learning (DL) models allow robots to identify obstacles, read signs, or inspect products. Technologies like Ultralytics YOLO26 are critical in this domain, offering the high-speed object detection required for real-time responsiveness on embedded hardware like the NVIDIA Jetson platform.
로봇 자율성을 주도하는 주요 ML 기능은 다음과 같습니다:
- 위치 추정 및 매핑(Localization and Mapping): SLAM(Simultaneous Localization and Mapping)과 같은 알고리즘을 사용하면 로봇이 미지의 환경에 대한 지도를 구축하는 동시에 그 안에서 자신의 위치를 추적할 수 있습니다.
- 조작(Manipulation): 정밀한 자세 추정(pose estimation)을 통해 로봇 팔은 물체의 방향을 결정할 수 있으며, 이를 통해 불규칙한 물체를 잡거나 빈 피킹(bin picking)과 같은 복잡한 작업을 원활하게 수행할 수 있습니다.
- 의사결정(Decision Making): 강화학습(Reinforcement Learning)을 통해 에이전트는 환경과 상호 작용하고 보상 신호를 받으며 최적의 전략을 학습합니다. 이는 Google DeepMind와 같은 연구 그룹이 개척한 방법입니다.
Link to this section실제 애플리케이션 사례#
지능형 로봇 공학의 적용은 효율성과 안전성을 향상함으로써 다양한 산업을 재편하고 있습니다.
Link to this section산업 자동화 및 제조#
인더스트리 4.0 패러다임에서 '코봇(cobot, 협동 로봇)'은 인간과 함께 작업합니다. 제조 분야의 AI(AI in manufacturing)를 활용하여, 이러한 시스템은 이미지 세그멘테이션(image segmentation)을 사용하여 조립 라인에서 인간 검사자가 놓칠 수 있는 미세한 결함을 식별합니다. 국제로봇연맹(IFR)은 전 세계적으로 이러한 스마트 자동화 시스템의 밀도가 크게 증가하고 있다고 보고합니다.
Link to this section물류 분야의 자율 이동 로봇(AMR)#
Warehouses utilize AMRs to transport goods without fixed infrastructure. Unlike older Automated Guided Vehicles (AGVs) that followed magnetic tapes, AMRs use autonomous navigation powered by Edge AI to dynamically reroute around obstacles. This capability is central to modern AI in logistics, optimizing supply chain throughput.
Link to this section로봇 공학 vs. 로봇 프로세스 자동화(RPA)#
비즈니스 환경에서 용어가 혼용되는 경우가 많으므로 물리적 로봇 공학(Robotics)과 로봇 프로세스 자동화(RPA)를 구분하는 것이 중요합니다.
- **로봇 공학(Robotics)**은 실제 세계와 상호 작용하는 물리적 하드웨어(예: 건설 현장을 검사하는 Boston Dynamics의 Spot 로봇)를 다룹니다.
- RPA는 디지털화된 반복적인 비즈니스 프로세스를 자동화하는 소프트웨어 봇(예: 웹 폼에서 데이터 스크래핑 또는 송장 처리)을 의미합니다.
두 분야 모두 자동화 증대를 목표로 하지만, 로봇 공학은 원자를 조작하고 RPA는 비트를 조작합니다.
Link to this section로봇 제어를 위한 비전 구현#
로봇에 비전 모델을 배포할 때는 안전을 보장하기 위해 낮은 추론 지연 시간(inference latency)을 최적화해야 하는 경우가 많습니다. 비전 알고리즘과 하드웨어 액추에이터 사이의 격차를 해소하기 위해 로봇 운영 체제(ROS)와 같은 미들웨어가 일반적으로 사용됩니다. 배포 전에 개발자들은 Ultralytics Platform을 사용하여 특수 데이터셋을 주석 처리하고 클라우드에서 학습 수명 주기를 관리합니다.
다음 예시는 파이썬(Python) 스크립트가 어떻게 비전 모델을 사용하여 카메라 피드에서 사람을 감지하는지 보여줍니다. 이는 이동형 로봇의 공통적인 안전 요건입니다:
from ultralytics import YOLO
# Load a lightweight YOLO26 model optimized for edge devices
model = YOLO("yolo26n.pt")
# Process a live camera feed (source=0) with a generator for efficiency
results = model.predict(source=0, stream=True)
for result in results:
# Check if a person (class index 0) is detected with high confidence
if result.boxes.conf.numel() > 0 and 0 in result.boxes.cls:
print("Person detected! Triggering stop command.")
# robot.stop() # Hypothetical hardware interface callLink to this section향후 방향#
이 분야는 특수화된 단일 기능 기계보다는 멀티태스킹이 가능한 범용 로봇으로 추세가 변화하고 있습니다. 파운데이션 모델(foundation models)의 혁신을 통해 로봇이 자연어 지시를 이해할 수 있게 되어 비기술 사용자도 로봇을 쉽게 사용할 수 있게 되었습니다. 또한, 농업 분야의 AI(AI in agriculture)의 발전으로 정밀하게 제초, 파종 및 수확을 수행하여 화학 물질 사용과 인건비를 절감하는 완전 자율 농업 선단이 등장하고 있습니다. MIT 컴퓨터 과학 및 인공지능 연구소(MIT CSAIL)과 같은 기관의 연구는 소프트 로봇 공학 및 인간-로봇 상호 작용의 한계를 계속해서 넓혀가고 있습니다.