Bilgisayarlı göründe budama ve nicelleştirme: Hızlı bir rehber
Budama ve nicelleştirmenin, bilgisayarlı görü modellerini optimize etmek ve uç cihazlarda daha hızlı performansı mümkün kılmak için neden gerekli olduğunu keşfet.
Teknoloji ilerledikçe uç cihazlar giderek daha yaygın hale geliyor. Kalp atış hızınızı takip eden akıllı saatlerden sokakları izleyen hava dronlarına kadar, uç sistemler verileri cihazın kendi içinde gerçek zamanlı olarak yerel düzeyde işleyebilir.
Bu yöntem, plaka tespiti veya jest takibi gibi kişisel verileri içeren uygulamalar için verileri buluta göndermekten genellikle daha hızlı ve daha güvenlidir. Bunlar, makinelerin görsel bilgileri yorumlamasını ve anlamasını sağlayan bir yapay zeka (AI) dalı olan bilgisayarlı görü örnekleridir.
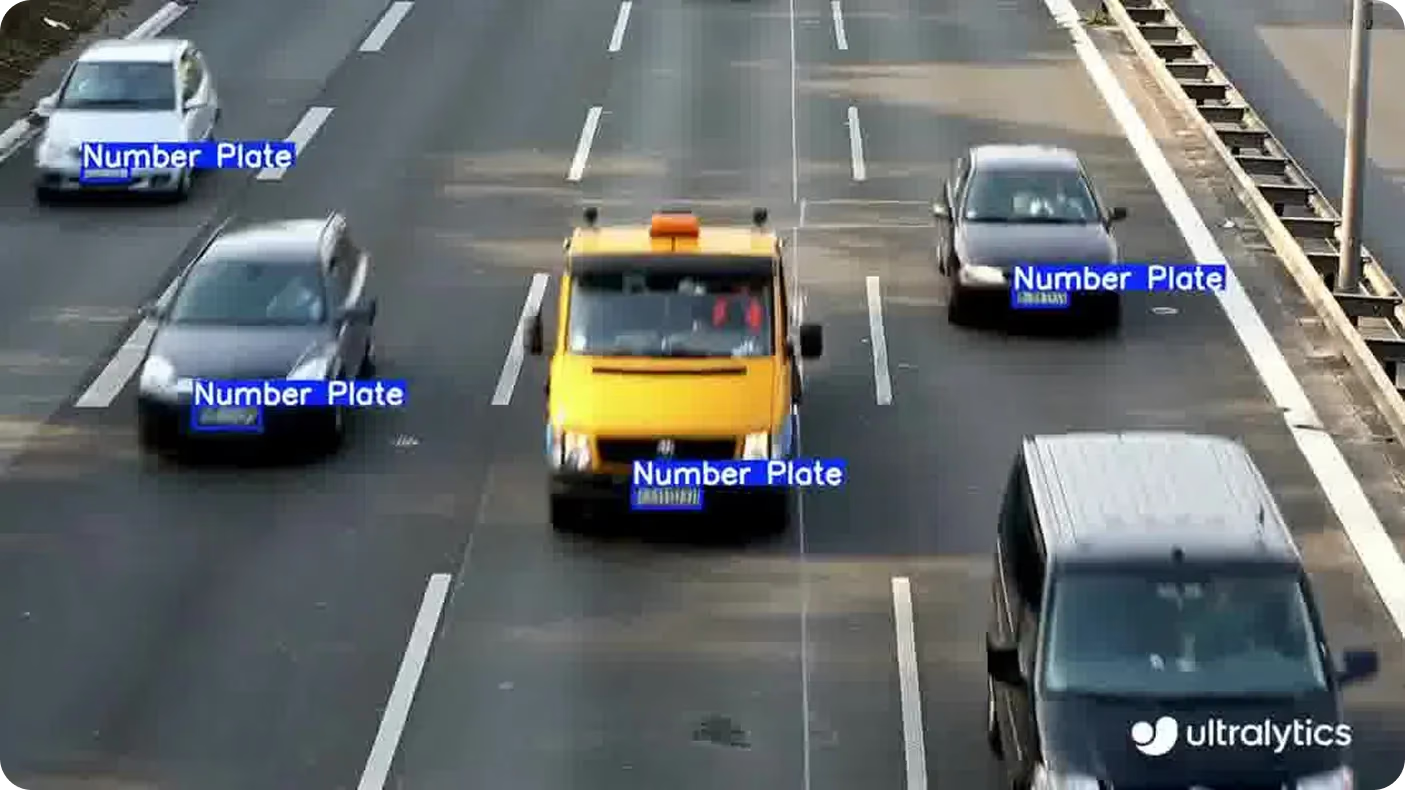
Şekil 1. Plaka tespiti örneği. (Kaynak)
Ancak önemli bir husus şudur ki, bu tür uygulamalar yoğun hesaplamayı kaldırabilen, minimum kaynak kullanan ve bağımsız olarak çalışabilen görü yapay zeka modellerine ihtiyaç duyar. Çoğu bilgisayarlı görü modeli, yüksek performanslı sistemler için geliştirildiğinden uç cihazlarda doğrudan dağıtım için daha az uygundur.
Bu boşluğu doldurmak için geliştiriciler, modeli daha küçük donanımlarda verimli çalışacak şekilde uyarlayan hedefli optimizasyonlar uygularlar. Bu ayarlamalar, bellek ve işlem gücünün sınırlı olduğu gerçek dünya uç dağıtımları için kritiktir.
İlginç bir şekilde, Ultralytics YOLO11 gibi bilgisayarlı görü modelleri zaten uç verimliliği düşünülerek tasarlandığından, gerçek zamanlı görevler için harikadır. Ancak performansları, budama ve nicemleme gibi model optimizasyon teknikleri kullanılarak daha da artırılabilir; bu da kısıtlı cihazlarda daha hızlı çıkarım ve daha düşük kaynak kullanımı sağlar.
Bu makalede budama ve nicemlemenin ne olduğuna, nasıl çalıştıklarına ve YOLO modellerinin gerçek dünya uç dağıtımlarında performans göstermesine nasıl yardımcı olabileceklerine daha yakından bakacağız. Haydi başlayalım!
Link to this sectionBudama ve nicemleme: Model optimizasyonunda temel teknikler#
Görü yapay zeka modellerini uç cihazlara dağıtım için hazırlarken temel hedeflerden biri, performanstan ödün vermeden modeli hafif ve güvenilir hale getirmektir. Bu genellikle modelin boyutunu ve hesaplama taleplerini azaltmayı gerektirir, böylece bellek, güç veya işlem kapasitesi sınırlı olan donanımlarda verimli bir şekilde çalışabilir. Bunu yapmanın iki yaygın yolu budama ve nicemlemedir.
Budama, sinir ağlarını daha küçük ve daha verimli hale getirmeye yardımcı olan bir yapay zeka model optimizasyonu tekniğidir. Birçok durumda, belirli bağlantılar veya düğümler gibi modelin bazı bölümleri, nihai tahminlere büyük bir katkı sağlamaz. Budama, bu daha az önemli bölümleri tanımlayıp kaldırarak çalışır, bu da modelin boyutunu küçültür ve performansını hızlandırır.
Öte yandan nicemleme, modelin kullandığı sayıların hassasiyetini azaltan bir optimizasyon tekniğidir. Yüksek hassasiyetli 32-bit kayan noktalı sayılara güvenmek yerine, model 8-bit tamsayılar gibi daha küçük ve daha verimli formatlara geçer. Bu değişiklik, bellek kullanımını düşürmeye ve modelin tahminlerde bulunduğu süreç olan çıkarımı hızlandırmaya yardımcı olur.
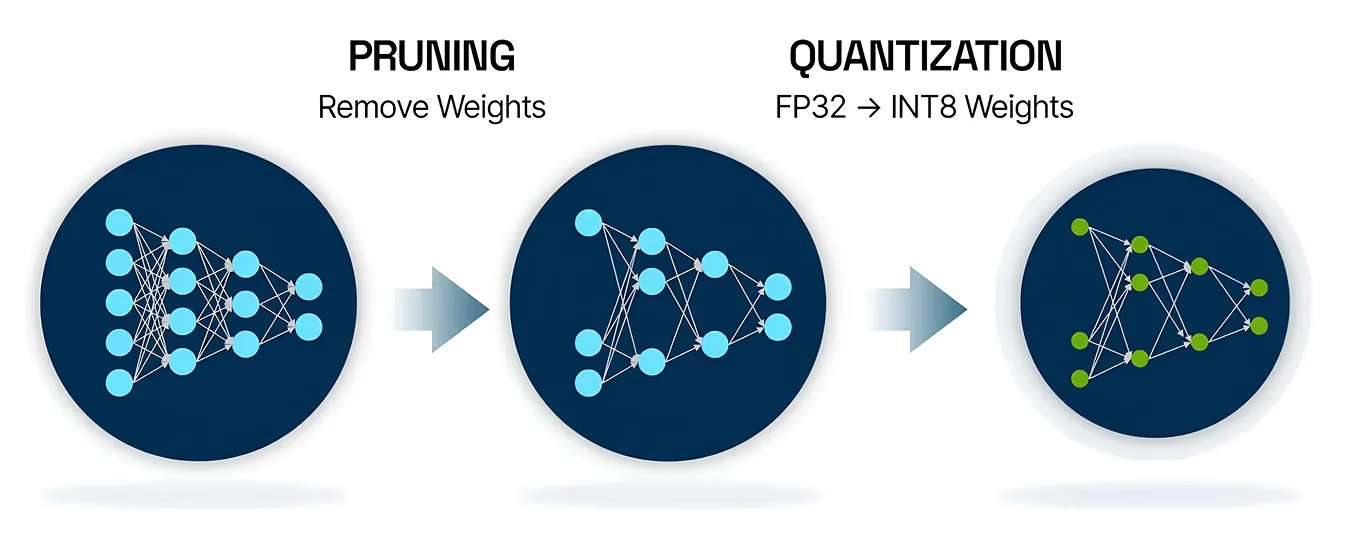
Şekil 2. Budama ve nicemlemeye bakış. (Kaynak)
Link to this sectionBudama ve nicemleme nasıl çalışır#
Budama ve nicemlemenin ne olduğunu artık daha iyi anladığımıza göre, her ikisinin de nasıl çalıştığına göz atalım.
Budama, duyarlılık analizi olarak bilinen bir süreç kullanılarak yapılır. Sinir ağı modellerinin belirli ağırlıklar, nöronlar veya kanallar gibi hangi bölümlerinin nihai çıktı tahminine en az katkıda bulunduğunu belirler. Bu bölümler, doğruluk üzerinde minimum etkiyle kaldırılabilir. Budamadan sonra model, performansını ince ayar yapmak için genellikle yeniden eğitilir. Bu döngü, boyutu ve doğruluğu arasında doğru dengeyi bulmak için tekrarlanabilir.
Bu arada, model nicemleme modelin veriyi nasıl işlediğine odaklanır. Modelin işlemesi gereken değer aralığını öğrenmek için örnek veriler üzerinde çalıştırıldığı kalibrasyon ile başlar. Bu değerler daha sonra 32-bit kayan noktadan 8-bit tamsayılar gibi daha düşük hassasiyetli formatlara dönüştürülür.
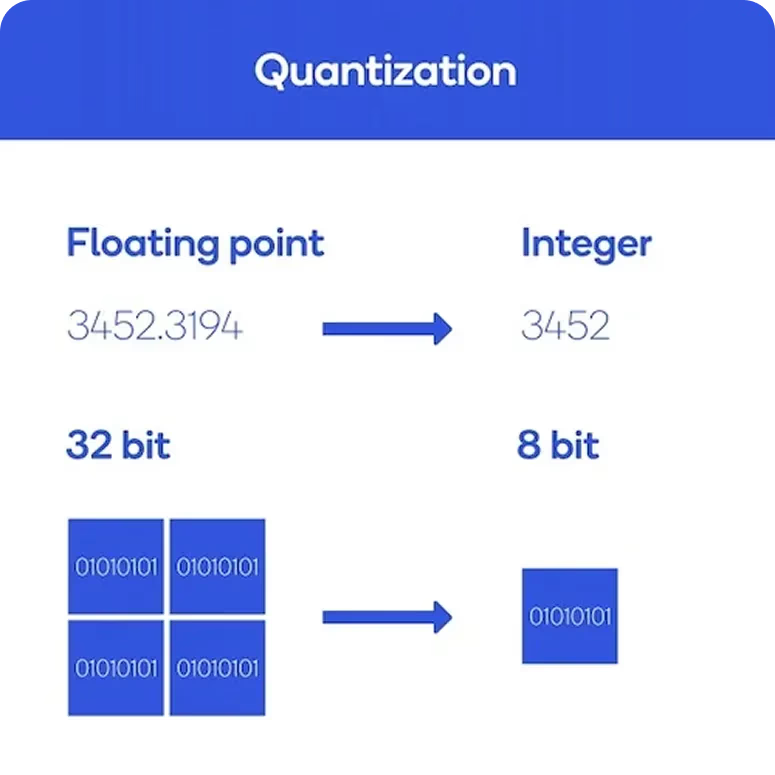
Şekil 3. Nicemleme, model boyutunu ve karmaşıklığını azaltmaya yardımcı olur. (Kaynak)
Gerçek dünya yapay zeka projelerinde budama ve nicemlemeyi kullanmayı kolaylaştıran çeşitli araçlar mevcuttur. PyTorch ve TensorFlow gibi çoğu yapay zeka çerçevesi, bu optimizasyon teknikleri için yerleşik destek içerir ve geliştiricilerin bunları doğrudan model dağıtım sürecine entegre etmesine olanak tanır.
Bir model optimize edildikten sonra, ONNX Runtime gibi araçlar onun sunucular, masaüstü bilgisayarlar ve uç cihazlar gibi çeşitli donanım platformlarında verimli bir şekilde çalışmasına yardımcı olabilir. Ayrıca Ultralytics, YOLO modellerinin nicemlemeye uygun formatlarda dışa aktarılmasına olanak tanıyan entegrasyonlar sunar, bu da model boyutunu küçültmeyi ve performansı artırmayı kolaylaştırır.
Link to this sectionUltralytics YOLO model optimizasyonuna genel bakış#
YOLO11 gibi Ultralytics YOLO modelleri, hızlı ve tek adımlı nesne algılama özellikleriyle geniş çapta tanınır ve bu da onları gerçek zamanlı görü yapay zeka görevleri için ideal kılar. Zaten uç dağıtım için hafif ve yeterince verimli olacak şekilde tasarlanmışlardır. Ancak, görsel özellikleri işlemeden sorumlu olan evrişimli katmanlar, çıkarım sırasında hala önemli miktarda işlem gücü talep edebilir.
Şunu merak edebilirsiniz: YOLO11 zaten uç kullanım için optimize edilmişse, neden daha fazla optimizasyona ihtiyaç duysun? Basitçe söylemek gerekirse, tüm uç cihazlar aynı değildir. Bazıları, standart bir LED ampulden daha az güç tüketen küçük gömülü işlemciler gibi çok minimal donanımlar üzerinde çalışır.
Bu gibi durumlarda, YOLO11 gibi modernize edilmiş bir model bile sorunsuz ve güvenilir bir performans sağlamak için ek optimizasyona ihtiyaç duyar. Budama ve nicemleme gibi teknikler, modelin boyutunu küçültmeye ve doğruluk üzerinde önemli bir etki yaratmadan çıkarımı hızlandırmaya yardımcı olur, bu da onları bu tür kısıtlı ortamlar için ideal kılar.
Bu optimizasyon tekniklerini uygulamayı kolaylaştırmak için Ultralytics, YOLO modellerini ONNX, TensorRT, OpenVINO, CoreML ve PaddlePaddle gibi birçok formata dışa aktarmak için kullanılabilecek çeşitli entegrasyonları destekler. Her format, belirli donanım türleri ve dağıtım ortamlarıyla iyi çalışacak şekilde tasarlanmıştır.
Örneğin, ONNX, araç ve platformlarla geniş uyumluluğu nedeniyle genellikle nicemleme iş akışlarında kullanılır. Öte yandan TensorRT, NVIDIA cihazları için yüksek oranda optimize edilmiştir ve INT8 kullanarak düşük hassasiyetli çıkarımı destekler, bu da onu uç GPU'larda yüksek hızlı dağıtım için ideal hale getirir.
Link to this sectionUltralytics YOLO model optimizasyonunun etkili kullanım durumları#
Bilgisayarlı görü çeşitli gerçek dünya uygulamalarına genişlemeye devam ederken, optimize edilmiş YOLO modelleri nesne algılama, örnek bölümleme ve nesne takibi gibi görevleri daha küçük, daha hızlı donanımlarda çalıştırmayı mümkün kılar. Şimdi, budama ve nicemlemenin bu bilgisayarlı görü görevlerini daha verimli ve pratik hale getirdiği birkaç kullanım durumunu tartışalım.
Link to this sectionYOLO11 destekli akıllı gözetim#
Birçok endüstriyel alan ve halka açık alan, güvenli ve emniyetli kalmak için gerçek zamanlı izlemeye güvenir. Transit istasyonları, üretim sahaları ve büyük dış mekan tesisleri gibi yerler, insanları veya araçları hızlı ve doğru bir şekilde tespit edebilen görü yapay zeka sistemlerine ihtiyaç duyar. Genellikle bu konumlar, sınırlı bağlantı ve donanım kısıtlamalarıyla çalışır, bu da büyük modellerin dağıtılmasını zorlaştırır.
Bu tür durumlarda, YOLO11 gibi optimize edilmiş bir görü yapay zeka modeli harika bir çözümdür. Kompakt boyutu ve hızlı performansı, onu gömülü kameralar veya akıllı sensörler gibi düşük güç tüketen uç cihazlarda çalıştırmak için mükemmel kılar. Bu modeller, sürekli bulut erişimine güvenmeden güvenlik ihlallerinin, yetkisiz girişlerin veya anormal aktivitelerin gerçek zamanlı tespitini sağlayarak görsel verileri doğrudan cihaz üzerinde işleyebilir.
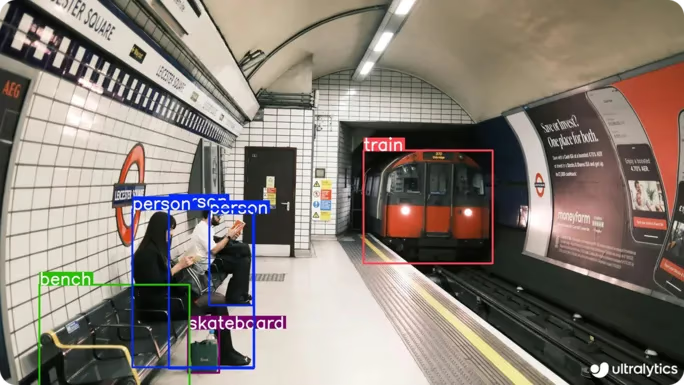
Şekil 4. YOLO11, metro istasyonları gibi halka açık yerleri izlemek için kullanılabilir.
Link to this sectionYOLO11 ile şantiyelerde güvenliği artırma#
Şantiyeler; ağır makineler, hareketli işçiler ve sürekli faaliyetle dolu, hızlı tempolu ve tahmin edilemez ortamlardır. Koşullar değişen programlar, ekipman hareketi ve hatta hava durumundaki ani değişiklikler nedeniyle hızla değişebilir. Böylesine dinamik bir ortamda, işçi güvenliği sürekli bir zorluk gibi hissettirebilir.
Gerçek zamanlı izleme kritik bir rol oynar, ancak geleneksel sistemler genellikle bulut erişimine veya sahada pratik olmayabilecek pahalı donanımlara güvenir. YOLO11 gibi modellerin etkili olabileceği yer burasıdır. YOLO11, internet bağlantısına ihtiyaç duymadan doğrudan şantiyede çalışan küçük, verimli uç cihazlarda çalışacak şekilde optimize edilebilir.
Örneğin, birkaç dönüme yayılan bir otoyol genişletmesi gibi büyük bir şantiyeyi düşünün. Bu tür bir ortamda, her aracı veya ekipmanı manuel olarak takip etmek zor ve zaman alıcı olabilir. Kamera ve optimize edilmiş bir YOLO11 modeliyle donatılmış bir drone, araçları otomatik olarak tespit edip takip ederek, trafik akışını izleyerek ve yetkisiz erişim veya güvensiz sürüş davranışı gibi güvenlik sorunlarını tanımlayarak yardımcı olabilir.

Şekil 5. Bir şantiyeden alınan drone görüntülerini analiz etme. (Kaynak)
Link to this sectionBilgisayarlı görüde budama ve nicemlemenin artıları ve eksileri#
İşte budama ve nicemleme gibi bilgisayarlı görü model optimizasyon yöntemlerinin sunduğu bazı temel avantajlar:
- Maliyet etkin dağıtım: Daha küçük ve daha verimli modeller, pahalı ve üst düzey donanım ihtiyacını azaltarak yapay zekayı farklı kullanım durumlarında daha erişilebilir ve ölçeklenebilir hale getirebilir.
- Daha düşük gecikme: Model mimarisini basitleştirerek ve hesaplama yükünü azaltarak, bu teknikler gerçek zamanlı uygulamalarda daha hızlı yanıt süreleri elde etmeye yardımcı olabilir.
- Enerji verimliliği: Hesaplama yükünü azaltmak, pil ile çalışan veya mobil sistemler için özellikle yararlı olan güç tüketimini de düşürür.
Budama ve nicemleme birçok avantaj sunsa da, geliştiricilerin modelleri optimize ederken göz önünde bulundurmaları gereken bazı ödünleşimleri de beraberinde getirirler. İşte akılda tutulması gereken bazı sınırlamalar:
- Doğruluk ödünleşimleri: Budama çok agresifse veya çok düşük bitli nicemleme kullanılırsa, mAP gibi metriklerle ölçülen modelin doğruluğu düşebilir.
- Donanım kısıtlamaları: Tüm cihazlar INT8 gibi düşük hassasiyetli formatları eşit derecede iyi desteklemez. Bu, optimize edilmiş bir modelin nerede ve nasıl dağıtılabileceğini kısıtlayabilir.
- Uygulama karmaşıklığı: İyi sonuçlar elde etmek genellikle dikkatli, modele özgü ayarlamalar gerektirir. Geliştiricilerin verimliliği artırırken performansı korumak için modeli yeniden eğitmeleri ve kapsamlı testler yapmaları gerekebilir.
Link to this sectionÖne çıkanlar#
Budama ve nicemleme, YOLO modellerinin uç cihazlarda daha iyi performans göstermesine yardımcı olan yararlı tekniklerdir. Modelin boyutunu küçültür, hesaplama ihtiyaçlarını düşürür ve doğrulukta gözle görülür bir kayıp olmaksızın tahminleri hızlandırırlar.
Bu optimizasyon yöntemleri ayrıca geliştiricilere, modelleri tamamen yeniden oluşturmaya gerek kalmadan farklı donanım türleri için ayarlama esnekliği sağlar. Biraz ayarlama ve test ile görü yapay zekasını gerçek dünya durumlarında uygulamak daha kolay hale gelir.
Büyüyen topluluğumuza katıl! Yapay zeka hakkında daha fazla bilgi edinmek için GitHub depomuzu keşfet. Bilgisayarlı görü projelerine başlamaya hazır mısın? Lisanslama seçeneklerimize göz at. Çözüm sayfalarımızı ziyaret ederek tarımda yapay zeka ve sağlık hizmetlerinde görü yapay zekasını keşfet!






