Cải thiện khả năng tái nhận dạng phương tiện với các model Ultralytics YOLO
Tìm hiểu cách các model Ultralytics YOLO đóng vai trò trong các giải pháp tái nhận dạng phương tiện bằng cách cung cấp khả năng phát hiện chính xác.

Khi bạn xem một chặng đua Formula One, việc nhận diện xe của đội đua yêu thích rất dễ dàng. Màu đỏ rực của Ferrari hay màu bạc của Mercedes nổi bật qua từng vòng đua.
Yêu cầu một cỗ máy làm điều tương tự, không phải trên đường đua sạch sẽ mà trên những đường phố đông đúc đầy xe cộ, là một thách thức lớn hơn nhiều. Đó là lý do tại sao tái nhận diện phương tiện (vehicle re-ID) gần đây đang thu hút sự chú ý trong không gian AI.
Tái nhận diện phương tiện cung cấp cho máy móc khả năng nhận diện cùng một phương tiện trên các camera đa góc nhìn hoặc không chồng lấp. Nó cũng hướng tới việc xác định phương tiện sau khi bị che khuất tạm thời (khi xe bị che khuất một phần) hoặc do thay đổi về ánh sáng và góc nhìn.
Một công nghệ cốt lõi thúc đẩy vehicle re-ID là computer vision. Computer vision là một phân ngành của trí tuệ nhân tạo tập trung vào việc dạy máy móc hiểu và diễn giải thông tin hình ảnh, chẳng hạn như hình ảnh và video. Sử dụng công nghệ này, các hệ thống AI có thể phân tích các đặc điểm của phương tiện và theo dõi chúng một cách đáng tin cậy trên các mạng lưới camera lớn cho các ứng dụng như giám sát đô thị và theo dõi giao thông.
Đặc biệt, các model Vision AI như Ultralytics YOLO11 và Ultralytics YOLO26 sắp ra mắt hỗ trợ các tác vụ như object detection và tracking. Chúng có thể nhanh chóng định vị phương tiện trong mỗi khung hình và theo dõi chuyển động của chúng qua một cảnh quay. Khi các model này được kết hợp với các mạng lưới tái nhận diện phương tiện, hệ thống tổng hợp có thể nhận diện cùng một phương tiện trên các nguồn cấp dữ liệu camera khác nhau, ngay cả khi góc nhìn hoặc điều kiện ánh sáng thay đổi.
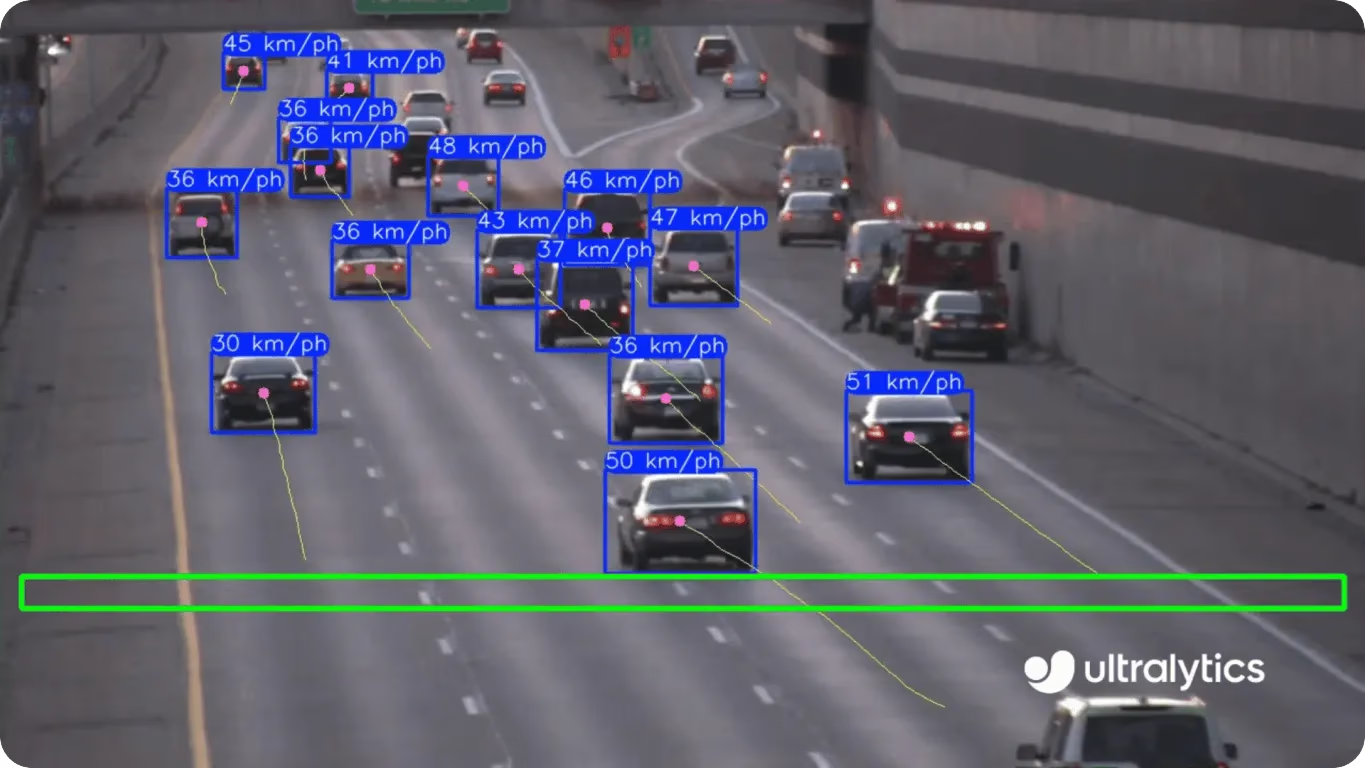
Hình 1. Ví dụ về việc sử dụng YOLO11 để theo dõi phương tiện và ước tính tốc độ (Nguồn)
Trong bài viết này, chúng ta sẽ xem xét cách thức hoạt động của tái nhận diện phương tiện, công nghệ làm cho nó khả thi và nơi nó đang được sử dụng trong các hệ thống giao thông thông minh. Hãy cùng bắt đầu!
Link to this sectionTái nhận diện phương tiện là gì?#
Tái nhận diện phương tiện là một ứng dụng quan trọng trong computer vision. Nó tập trung vào việc nhận diện cùng một phương tiện khi nó xuất hiện trên các camera khác nhau, không chồng lấp, giữ cho danh tính của nó nhất quán khi di chuyển qua một thành phố. Điều này đầy thách thức vì mỗi camera có thể ghi lại phương tiện từ một góc độ khác nhau, dưới điều kiện ánh sáng khác nhau hoặc bị che khuất một phần.
Hãy xem xét một kịch bản trong đó một chiếc sedan màu xanh đi qua một giao lộ và sau đó xuất hiện trên một con phố khác, được theo dõi bởi một camera khác. Góc độ, ánh sáng và bối cảnh đều đã thay đổi, và các xe khác có thể tạm thời che khuất tầm nhìn. Mặc dù vậy, hệ thống vehicle re-ID vẫn cần xác định rằng đó là cùng một phương tiện.
Những tiến bộ gần đây trong deep learning, đặc biệt là với các mạng neural tích chập (CNNs) và các model dựa trên Transformer, đã làm cho quá trình này chính xác hơn rất nhiều. Các model này có thể trích xuất các mẫu hình ảnh có ý nghĩa và phân biệt giữa các phương tiện trông giống nhau trong khi vẫn xác định chính xác phương tiện mục tiêu.
Trong các hệ thống giao thông thông minh, khả năng này hỗ trợ giám sát liên tục, tái thiết lộ trình và phân tích giao thông toàn thành phố, mang lại cho các hệ thống thành phố thông minh cái nhìn rõ ràng hơn về cách các phương tiện di chuyển. Chúng giúp cải thiện an toàn và hiệu quả.
Link to this sectionHiểu cách thức hoạt động của tái nhận diện phương tiện#
Thông thường, cảnh quay video từ các giao lộ, bãi đậu xe và đường cao tốc được phân tích bằng các kỹ thuật tái nhận diện phương tiện để xác định xem cùng một phương tiện có xuất hiện trên các camera khác nhau hay không. Khái niệm này tương tự như tái nhận diện con người, nơi các hệ thống theo dõi cá nhân trên nhiều góc nhìn, nhưng ở đây trọng tâm là phân tích các đặc điểm cụ thể của phương tiện thay vì ngoại hình con người.
Quy trình thực hiện bao gồm một số bước chính, mỗi bước được thiết kế để giúp hệ thống phát hiện phương tiện, trích xuất các đặc điểm hình ảnh của chúng và khớp chúng một cách đáng tin cậy trên các góc nhìn khác nhau.
Ở cấp độ cao, hệ thống trước tiên phát hiện các phương tiện trong mỗi khung hình và sau đó trích xuất các đặc điểm như màu sắc, hình dạng và kết cấu để tạo ra một biểu diễn kỹ thuật số duy nhất, hoặc embedding, cho mỗi phương tiện. Các embedding này được so sánh theo thời gian và trên các camera, thường được hỗ trợ bởi các kiểm tra object tracking và kiểm tra không gian-thời gian, để quyết định xem hai lần xuất hiện có thuộc về cùng một phương tiện hay không.
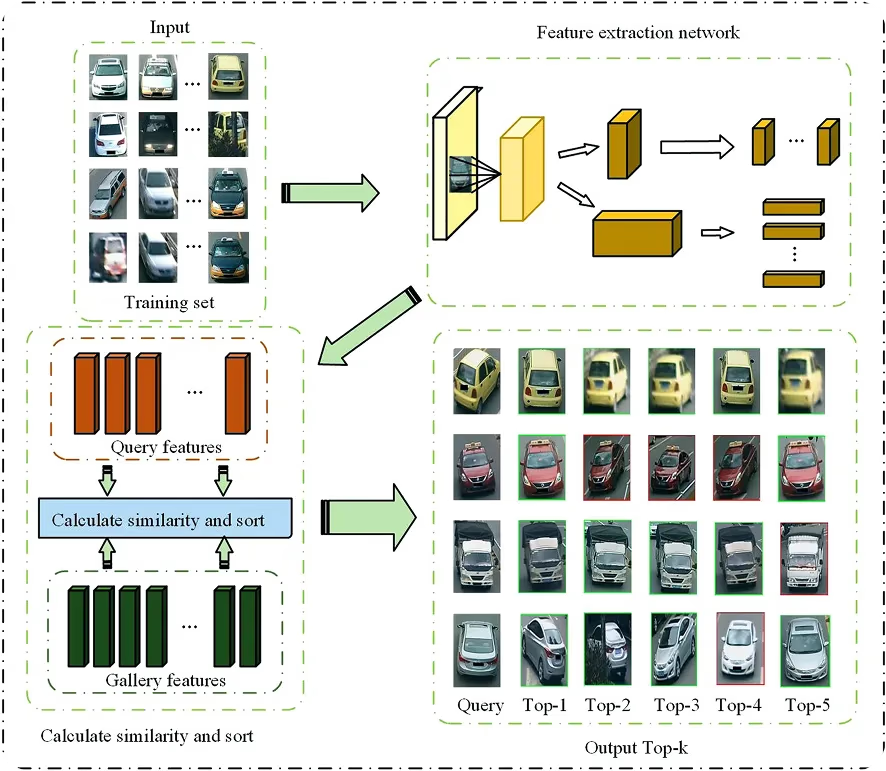
Hình 2. Cách thức hoạt động của tái nhận diện phương tiện. (Nguồn)
Dưới đây là cái nhìn chi tiết hơn về quy trình này:
- Object detection: Hệ thống trước tiên xác định và định vị các phương tiện trong mỗi khung hình video, vì vậy nó biết chính xác các vùng nào cần xử lý. Bước này thường được xử lý bởi các model object detection.
- Feature extraction: Sau khi phát hiện, một mạng lưới Re-ID hoặc mạng lưới trích xuất đặc điểm chuyên dụng sẽ phân tích từng vùng cắt phương tiện và tạo ra các bản đồ đặc điểm hoặc các biểu diễn đặc điểm ghi lại các chi tiết hình ảnh như màu sắc, hình dạng, kết cấu và các bộ phận đặc trưng.
- Embedding generation: Những đặc điểm được trích xuất này được chuyển thành một biểu diễn số gọi là feature embedding. Embedding này đóng vai trò như một dấu vân tay kỹ thuật số ghi lại cách phương tiện xuất hiện từ các góc độ khác nhau. Trước khi khớp, các embedding này thường được chuẩn hóa để những khác biệt do ánh sáng, độ tương phản hoặc cài đặt camera không gây nhiễu cho quá trình so sánh danh tính. Việc chuẩn hóa đảm bảo hệ thống tập trung vào các đặc điểm có ý nghĩa, liên quan đến danh tính thay vì nhiễu.
- Object tracking: Trong một góc nhìn camera duy nhất, các thuật toán tracking kết nối các lần phát hiện qua các khung hình, giúp duy trì danh tính nhất quán khi phương tiện di chuyển qua cảnh quay.
- Cross-camera matching: Để khớp cùng một phương tiện trên các camera khác nhau, hệ thống so sánh các embedding (được tạo bởi mạng lưới Re-ID) cùng với thông tin về thời gian và vị trí. Bước này xác định xem hai lần xuất hiện có thuộc về cùng một phương tiện hay không, ngay cả khi các camera không chồng lấp.
Link to this sectionLàm thế nào các model Ultralytics YOLO có thể hỗ trợ tái nhận diện phương tiện#
Các model Ultralytics YOLO đóng một vai trò hỗ trợ quan trọng trong các đường ống tái nhận diện phương tiện. Mặc dù chúng không tự mình thực hiện Re-ID, chúng cung cấp các khả năng cần thiết khác, chẳng hạn như phát hiện nhanh và theo dõi ổn định, mà các mạng lưới Re-ID phụ thuộc vào để có sự khớp chéo camera chính xác.
Tiếp theo, hãy xem xét kỹ hơn cách các model Ultralytics YOLO như YOLO11 có thể tăng cường các hệ thống tái nhận diện phương tiện.
Link to this sectionMột module phát hiện phương tiện chính xác: Phần đầu tiên của các hệ thống Re-ID#
Nền tảng của bất kỳ hệ thống tái nhận diện phương tiện nào là object detection chính xác. Các model Ultralytics YOLO như YOLO11 là một lựa chọn tuyệt vời cho việc này, vì chúng có thể nhanh chóng phát hiện phương tiện trong mỗi khung hình, ngay cả trong các cảnh bận rộn với sự che khuất một phần, giao thông đông đúc hoặc điều kiện ánh sáng thay đổi.
Chúng cũng có thể được huấn luyện tùy chỉnh, nghĩa là bạn có thể fine-tune model trên tập dữ liệu của riêng mình để nó học cách nhận diện các loại phương tiện cụ thể, như taxi, xe giao hàng hoặc phương tiện đội xe. Điều này đặc biệt hữu ích khi một giải pháp đòi hỏi sự phát hiện chuyên biệt hơn. Bằng cách cung cấp các bounding box sạch sẽ, chính xác, các model Ultralytics YOLO cung cấp cho các mạng lưới Re-ID các đầu vào chất lượng cao để làm việc, dẫn đến việc khớp trên các camera đáng tin cậy hơn.
Link to this sectionHỗ trợ theo dõi đơn camera đáng tin cậy#
Sau khi phương tiện được phát hiện, các model như YOLO11 cũng có thể hỗ trợ theo dõi đối tượng ổn định trong một góc nhìn camera duy nhất. Object tracking là quá trình theo dõi một phương tiện đã được phát hiện qua các khung hình liên tiếp và gán cho nó một ID nhất quán khi nó di chuyển.
Với sự hỗ trợ tích hợp cho các thuật toán tracking như ByteTrack và BoT-SORT trong Ultralytics Python package, YOLO11 có thể duy trì các ID nhất quán khi phương tiện di chuyển qua cảnh quay. Việc theo dõi ổn định này làm giảm sự chuyển đổi danh tính trước khi hệ thống Re-ID tiếp quản, điều này cuối cùng cải thiện độ chính xác của việc khớp trên các camera.
Link to this sectionTùy chọn Re-ID cấp tracker để cải thiện độ ổn định danh tính#
Ngoài việc theo dõi dựa trên chuyển động tiêu chuẩn, Ultralytics Python package bao gồm các tùy chọn Re-ID capabilities dựa trên ngoại hình trong tracker BoT-SORT của nó. Điều này có nghĩa là tracker có thể sử dụng các đặc điểm ngoại hình trực quan, không chỉ các mẫu chuyển động hoặc sự chồng lấp bounding-box, để xác định xem hai lần phát hiện có thuộc về cùng một phương tiện hay không.
Khi được kích hoạt, BoT-SORT trích xuất các embedding ngoại hình nhẹ từ bộ phát hiện hoặc từ model phân loại YOLO11 và sử dụng chúng để xác minh danh tính giữa các khung hình. Tín hiệu ngoại hình bổ sung này giúp tracker duy trì các ID ổn định hơn trong các tình huống đầy thách thức, chẳng hạn như sự che khuất ngắn, các phương tiện đi qua gần nhau hoặc các thay đổi nhỏ do chuyển động của camera.
Mặc dù Re-ID tích hợp này không nhằm thay thế việc tái nhận diện phương tiện xuyên camera hoàn chỉnh, nó cải thiện sự nhất quán danh tính trong một góc nhìn camera duy nhất và tạo ra các tracklet sạch hơn mà các module Re-ID ở hạ nguồn có thể dựa vào. Để sử dụng các tính năng theo dõi dựa trên ngoại hình này, bạn chỉ cần kích hoạt Re-ID trong tệp cấu hình tracker BoT-SORT bằng cách đặt “with_reid” thành “True” và chọn model nào sẽ cung cấp các đặc điểm ngoại hình.
Để biết thêm chi tiết, bạn có thể xem documentation page on object tracking của Ultralytics, giải thích các tùy chọn Re-ID có sẵn và cách cấu hình chúng.
Link to this sectionCung cấp các đầu vào chất lượng cao cho các mạng lưới Re-ID#
Ngoài việc cải thiện độ ổn định danh tính trong khi tracking, các model YOLO cũng đóng một vai trò quan trọng trong việc chuẩn bị các đầu vào hình ảnh sạch cho chính mạng lưới Re-ID.
Sau khi một phương tiện được phát hiện, bounding box của nó thường được cắt ra và gửi đến mạng lưới tái nhận diện, nơi trích xuất các đặc điểm hình ảnh cần thiết cho việc khớp. Bởi vì các model Re-ID phụ thuộc rất nhiều vào các hình ảnh được cắt này, các đầu vào kém, chẳng hạn như các phần cắt bị mờ, lệch hoặc không hoàn chỉnh, có thể dẫn đến các embedding yếu hơn và việc khớp trên các camera ít đáng tin cậy hơn.
Các model Ultralytics YOLO giúp giảm bớt các vấn đề này bằng cách liên tục tạo ra các bounding box sạch sẽ, được căn chỉnh tốt để ghi lại toàn bộ phương tiện quan tâm. Với các phần cắt rõ ràng và chính xác hơn, mạng lưới Re-ID có thể tập trung vào các chi tiết có ý nghĩa như màu sắc, hình dạng, kết cấu và các đặc điểm phân biệt khác. Các đầu vào chất lượng cao dẫn đến hiệu suất Re-ID đáng tin cậy và chính xác hơn trên các góc nhìn camera.
Link to this sectionKích hoạt khả năng khớp trên các camera khi kết hợp với một model Re-ID#
Mặc dù các model Ultralytics YOLO không tự thực hiện tái nhận diện, chúng cung cấp thông tin quan trọng mà một mạng lưới Re-ID cần để so sánh các phương tiện trên các góc nhìn camera khác nhau. Các model như YOLO11 có thể đảm nhận việc định vị và theo dõi các phương tiện trong mỗi camera, trong khi model Re-ID xác định xem hai phần cắt phương tiện từ các vị trí khác nhau có thuộc về cùng một danh tính hay không.
Khi các thành phần này hoạt động cùng nhau, YOLO cho phát hiện và tracking, cùng một model embedding chuyên dụng cho feature extraction, chúng tạo thành một đường ống khớp phương tiện đa camera hoàn chỉnh. Điều này giúp khả thi việc liên kết cùng một phương tiện khi nó di chuyển qua một mạng lưới camera lớn hơn.
Ví dụ, trong một nghiên cứu gần đây, các nhà nghiên cứu đã sử dụng một model YOLO11 nhẹ làm vehicle detector trong một hệ thống theo dõi đa camera trực tuyến. Nghiên cứu cho thấy việc sử dụng YOLO11 đã giúp giảm thời gian phát hiện mà không làm giảm độ chính xác, điều này cải thiện hiệu suất tổng thể của việc tracking ở hạ nguồn và khớp trên các camera.

Hình 3. Theo dõi đa phương tiện dựa trên YOLO11 và tái nhận diện trên nhiều camera. (Nguồn)
Link to this sectionCác kiến trúc dựa trên deep learning cho vehicle Re-ID#
Bây giờ chúng ta đã hiểu rõ hơn về cách các model Ultralytics YOLO có thể hỗ trợ tái nhận diện phương tiện, hãy xem xét kỹ hơn các model deep learning xử lý các bước trích xuất đặc điểm và khớp. Các model này chịu trách nhiệm học cách phương tiện trông như thế nào, tạo ra các embedding mạnh mẽ và phân biệt giữa các phương tiện trông giống nhau về mặt hình ảnh trên các góc nhìn camera khác nhau.
Dưới đây là một số ví dụ về các thành phần deep learning cốt lõi được sử dụng trong các hệ thống tái nhận diện đối tượng:
-
Feature extraction với CNNs: Các mạng neural tích chập như ResNet50 hoặc ResNet101 học các đặc điểm sâu thông qua nhận dạng mẫu, xác định các yếu tố như màu sắc, hình dạng và kết cấu phân biệt phương tiện này với phương tiện khác. Các mẫu đã học này sau đó được chuyển đổi thành các embedding đóng vai trò là biểu diễn kỹ thuật số duy nhất của phương tiện.
-
Attention mechanisms và Transformers: Các mạng lưới và lớp chú ý, bao gồm chú ý không gian, có thể giúp làm nổi bật các vùng quan trọng của một phương tiện, chẳng hạn như đèn pha, cửa sổ hoặc khu vực biển số. Chú ý không gian tập trung model vào nơi các tín hiệu hình ảnh mang tính thông tin nhất được đặt, trong khi các model dựa trên Transformer như Vision Transformers (ViT) nắm bắt các mối quan hệ toàn cầu trên toàn bộ hình ảnh. Cùng nhau, chúng cải thiện độ chính xác ở cấp độ chi tiết khi các phương tiện trông rất giống nhau.
-
Các mạng lưới dựa trên bộ phận và đa nhánh: Một số model Re-ID phân tích các vùng phương tiện cụ thể một cách riêng biệt, chẳng hạn như nóc xe, đèn hậu hoặc các tấm ốp bên, và sau đó kết hợp các kết quả. Điều này có nghĩa là hệ thống vẫn mạnh mẽ ngay cả khi các phương tiện bị che khuất một phần hoặc được xem từ các góc độ khó.
Ngoài các thành phần kiến trúc này, metric learning đóng vai trò quan trọng trong việc huấn luyện các model vehicle Re-ID. Các hàm mất mát như triplet loss, contrastive loss và cross-entropy loss giúp hệ thống học các embedding mạnh mẽ, phân biệt bằng cách kéo lại gần các hình ảnh của cùng một phương tiện trong khi đẩy ra xa các hình ảnh khác nhau.
Link to this sectionCác tập dữ liệu và benchmark tái nhận diện phương tiện phổ biến#
Trong nghiên cứu về computer vision, chất lượng của một tập dữ liệu có tác động lớn đến mức độ hoạt động của một model sau khi triển khai. Một tập dữ liệu cung cấp các hình ảnh hoặc video được dán nhãn mà từ đó model học hỏi.
Đối với tái nhận diện phương tiện, các tập dữ liệu tiên tiến này phải ghi lại các điều kiện đa dạng như ánh sáng, thay đổi góc nhìn và biến đổi thời tiết. Sự đa dạng này giúp các model xử lý sự phức tạp của môi trường giao thông trong thế giới thực.
Dưới đây là sơ lược về các tập dữ liệu phổ biến hỗ trợ việc huấn luyện, tối ưu hóa và đánh giá các model tái nhận diện phương tiện:
- VeRi-776 dataset: Đây là một bộ sưu tập hơn 50.000 hình ảnh phương tiện được chú thích ghi lại từ 20 camera thành phố. Các chú thích bao gồm ID phương tiện, màu sắc, model và các vùng biển số, cho phép học đặc điểm chi tiết.
- VehicleID dataset: Tập dữ liệu quy mô lớn này có hơn 200.000 hình ảnh đại diện cho hơn 26.000 phương tiện. Nó thường được chọn để nghiên cứu khả năng mở rộng và thực hiện so sánh cơ sở giữa các phương pháp khác nhau.
- VeRi-Wild dataset: Nó được thiết kế để phản ánh sự biến đổi trong thế giới thực, bao gồm sự khác biệt về góc nhìn, thời tiết và sự che khuất một phần. Nó thường được sử dụng để đánh giá độ mạnh mẽ và khả năng tổng quát hóa của model.

Hình 4. Ví dụ về các phương tiện trong tập dữ liệu VeRi-776. (Nguồn)
Hiệu suất của model trên các tập dữ liệu này thường được đánh giá bằng các chỉ số như mean average precision (mAP) và độ chính xác Rank-1 hoặc Rank-5. mAP đo lường mức độ chính xác mà model truy xuất tất cả các kết quả phù hợp cho một phương tiện nhất định, trong khi điểm Rank-1 và Rank-5 cho biết liệu kết quả phù hợp đúng có xuất hiện ở đầu danh sách kết quả hoặc trong số các dự đoán đầu tiên hay không.
Cùng nhau, các benchmark này cung cấp cho các nhà nghiên cứu một cách nhất quán để so sánh các phương pháp khác nhau và đóng vai trò quan trọng trong việc hướng dẫn phát triển các hệ thống tái nhận diện phương tiện chính xác và đáng tin cậy hơn cho việc sử dụng trong thế giới thực.
Link to this sectionCác ứng dụng của tái nhận diện phương tiện#
Bây giờ chúng ta đã đề cập đến các nguyên tắc cơ bản, hãy cùng đi qua một số trường hợp sử dụng trong thế giới thực nơi tái nhận diện phương tiện hỗ trợ các quy trình vận tải, di chuyển và giám sát thực tế.
Link to this sectionGiám sát và theo dõi giao thông đô thị#
Các con đường thành phố bận rộn liên tục đầy ắp chuyển động, và các camera giao thông thường gặp khó khăn trong việc theo dõi cùng một phương tiện khi nó di chuyển giữa các khu vực khác nhau. Những thay đổi về ánh sáng, cảnh quay đông đúc và các phương tiện trông gần như giống hệt nhau có thể khiến danh tính bị mất trên các camera.
Tái nhận diện phương tiện giải quyết điều này bằng cách phát hiện phương tiện rõ ràng, trích xuất các đặc điểm đặc trưng và duy trì các ID nhất quán ngay cả trong cảnh quay độ phân giải thấp hoặc bận rộn. Kết quả là việc theo dõi liên tục, mượt mà hơn trên mạng lưới, mang lại cho các đội ngũ giao thông cái nhìn rõ ràng hơn về cách các phương tiện di chuyển qua thành phố và cho phép phản ứng nhanh hơn, có thông tin hơn đối với tắc nghẽn và sự cố.
Link to this sectionCác hệ thống bãi đậu xe thông minh#
Các cơ sở bãi đậu xe thông minh dựa vào việc nhận diện phương tiện nhất quán để quản lý việc vào, ra, kiểm soát truy cập và phân bổ không gian. Tuy nhiên, các camera trong các môi trường này thường ghi lại phương tiện từ các góc độ bất thường và dưới điều kiện ánh sáng đầy thách thức, chẳng hạn như trong các gara ngầm, các khu vực có bóng râm hoặc các bãi đậu xe ngoài trời vào lúc chạng vạng.
Những điều kiện này làm cho việc xác nhận xem có phải cùng một phương tiện đang được nhìn thấy qua các khu vực khác nhau hay không trở nên khó khăn hơn. Khi danh tính không nhất quán, hồ sơ bãi đậu xe có thể bị hỏng, kiểm soát truy cập trở nên ít đáng tin cậy hơn và tài xế có thể gặp phải sự chậm trễ. Đó là lý do tại sao nhiều hệ thống bãi đậu xe thông minh tích hợp các model tái nhận diện phương tiện để duy trì một danh tính ổn định cho mỗi phương tiện khi nó di chuyển qua cơ sở.
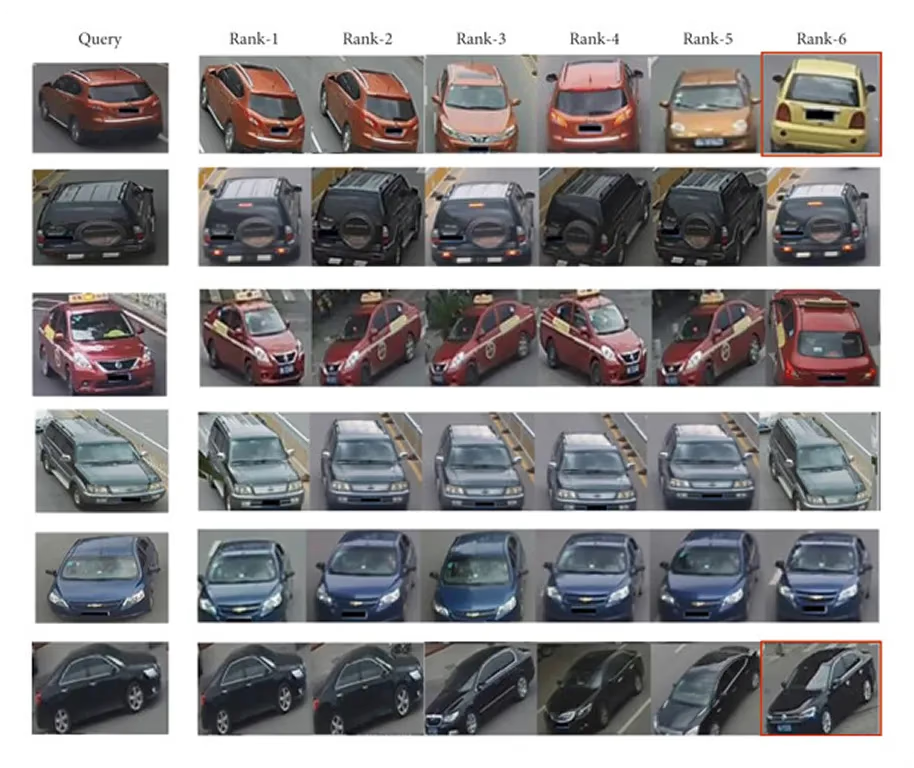
Hình 5. Ví dụ về tái nhận diện phương tiện cho thấy hình ảnh phương tiện đã chọn ở bên trái và các kết quả tìm kiếm khớp ở bên phải. (Nguồn)
Link to this sectionThực thi pháp luật và pháp y#
Dựa trên nền tảng theo dõi giao thông, tái nhận diện phương tiện cũng đóng một vai trò quan trọng trong việc thực thi pháp luật và điều tra pháp y. Trong nhiều trường hợp, các sĩ quan cần theo dõi một phương tiện qua nhiều camera, nhưng biển số xe có thể không đọc được, bị thiếu hoặc bị cố tình che khuất.
Các cảnh quay đông đúc, tầm nhìn thấp và sự che khuất một phần có thể làm cho các phương tiện khác nhau trông giống nhau một cách đánh lừa, khiến việc nhận diện thủ công trở nên chậm chạp và không đáng tin cậy. Tái nhận diện phương tiện có thể được sử dụng để truy vết chuyển động của một phương tiện qua các mạng lưới camera không chồng lấp bằng cách phân tích các đặc điểm hình ảnh của nó thay vì chỉ dựa vào biển số xe.
Điều này có nghĩa là các điều tra viên có thể dễ dàng theo dõi chuyển động của phương tiện hơn, hiểu khi nào nó xuất hiện ở các vị trí khác nhau và xác nhận lộ trình của nó trước và sau một sự cố. Vehicle re-ID được hỗ trợ bởi AI cũng hỗ trợ các tác vụ như theo dõi các phương tiện tình nghi, xem lại cảnh quay sự cố hoặc xác định hướng di chuyển của phương tiện trước hoặc sau một sự kiện.
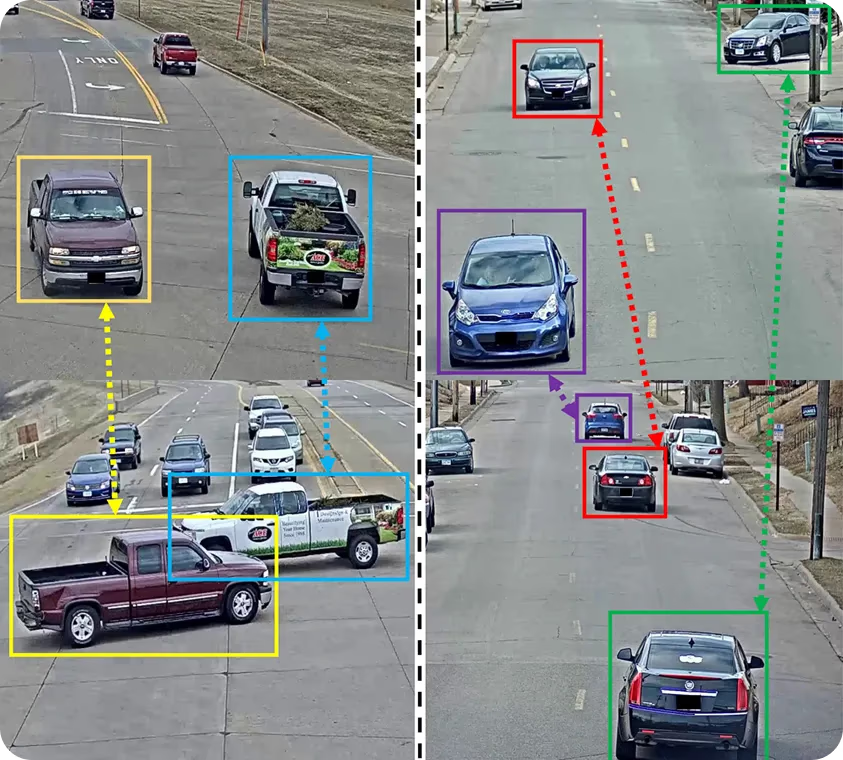
Hình 6. Các phương tiện được khớp trên các camera khác nhau với các góc nhìn khác nhau. (Nguồn)
Link to this sectionTheo dõi đội xe và logistics#
Các hoạt động đội xe và logistics thường dựa vào GPS, thẻ RFID và nhật ký thủ công để theo dõi chuyển động của phương tiện, nhưng các công cụ này để lại những khoảng trống ở các khu vực được bao phủ bởi camera an ninh hoặc camera sân bãi, chẳng hạn như bến bốc dỡ, sân kho và mạng lưới đường nội bộ.
Các phương tiện thường xuyên di chuyển giữa các camera không chồng lấp, biến mất sau các cấu trúc hoặc trông gần như giống hệt các phương tiện khác trong đội xe, khiến việc xác nhận xem có phải cùng một phương tiện đã được nhìn thấy ở các vị trí khác nhau hay không trở nên khó khăn. Các hệ thống tái nhận diện phương tiện có thể giúp đóng lại những khoảng trống này bằng cách phân tích các chi tiết hình ảnh và thông tin thời gian để duy trì một danh tính nhất quán cho mỗi phương tiện khi nó di chuyển qua cơ sở.
Điều này mang lại cho các nhà quản lý đội xe cái nhìn đầy đủ hơn về hoạt động bên trong các trung tâm của họ, hỗ trợ các tác vụ như xác minh lộ trình giao hàng, xác định các chuyển động bất thường và đảm bảo rằng các phương tiện tuân theo lộ trình dự kiến.
Link to this sectionƯu điểm và nhược điểm của các tác vụ vehicle re-ID#
Dưới đây là một số lợi ích chính của việc sử dụng tái nhận diện phương tiện hỗ trợ bởi AI:
- Giảm khối lượng công việc thủ công: Vehicle re-ID tự động hóa các tác vụ khớp danh tính mà nếu không sẽ cần đánh giá thủ công mở rộng, giảm đáng kể thời gian và công sức cần thiết để phân tích cảnh quay video.
- Tự động hóa và thông tin chi tiết thời gian thực: Bằng cách kết hợp phát hiện, theo dõi và khớp đặc điểm, vehicle re-ID hỗ trợ giám sát tự động liên tục và có thể cung cấp cảnh báo thời gian thực để phản ứng nhanh hơn với sự cố.
- Khả năng mở rộng và khả năng thích ứng: Các model Re-ID có thể thích ứng với các môi trường mới, điều kiện ánh sáng hoặc góc quay camera thông qua việc học đặc điểm mạnh mẽ, trích xuất đặc điểm đa quy mô và các biểu diễn bất biến vẫn ổn định dưới những thay đổi về hình ảnh. Những khả năng này làm cho chúng phù hợp cho cả mạng lưới thành phố lớn và các triển khai nhỏ hơn.
Mặc dù tái nhận diện phương tiện cung cấp nhiều ưu điểm, cũng có một số hạn chế cần xem xét. Dưới đây là một vài yếu tố ảnh hưởng đến độ tin cậy của nó trong các môi trường thế giới thực:
- Nhu cầu tính toán cao: Việc trích xuất đặc điểm, tạo embedding và khớp trên các camera đòi hỏi sức mạnh xử lý đáng kể, đặc biệt là khi giám sát các mạng lưới camera lớn.
- Biến đổi môi trường: Các yếu tố như ánh sáng ban đêm, thay đổi thời tiết, bóng râm và sự che khuất có thể làm suy giảm khả năng duy trì danh tính nhất quán trên các cảnh quay của model.
- Hạn chế về tập dữ liệu và miền: Các model được huấn luyện trên các tập dữ liệu hạn chế hoặc lý tưởng hóa có thể không tổng quát hóa tốt với các điều kiện thế giới thực mà không cần fine-tune thêm hoặc thích ứng miền.
Link to this sectionCon đường phía trước cho các phương pháp tái nhận diện phương tiện#
Tái nhận diện phương tiện vẫn đang tiếp tục tiến bộ khi công nghệ phát triển. Các ấn phẩm gần đây từ IEEE, CVPR và arXiv, cùng với các bài thuyết trình tại các hội nghị quốc tế, làm nổi bật một sự chuyển dịch rõ ràng hướng tới các model phong phú hơn kết hợp nhiều nguồn dữ liệu và suy luận đặc điểm nâng cao hơn. Công việc tương lai trong lĩnh vực này có khả năng sẽ tập trung vào việc xây dựng các hệ thống mạnh mẽ, hiệu quả hơn và có khả năng xử lý sự biến đổi trong thế giới thực ở quy mô lớn.
Ví dụ, một hướng đi đầy hứa hẹn là việc sử dụng transformer-based models và các mạng tổng hợp đồ thị. Transformer có thể phân tích toàn bộ hình ảnh và hiểu cách tất cả các chi tiết hình ảnh khớp với nhau như thế nào, điều này giúp hệ thống nhận diện cùng một phương tiện ngay cả khi góc nhìn hoặc ánh sáng thay đổi.
Các mô hình dựa trên đồ thị (graph-based) tiến thêm một bước bằng cách xử lý các bộ phận khác nhau của phương tiện hoặc góc nhìn camera như các điểm kết nối trong một mạng lưới. Điều này cho phép hệ thống hiểu được mối tương quan giữa các điểm mấu chốt đó và đưa ra quyết định chính xác hơn về danh tính phương tiện và các đặc trưng phân biệt.
Một tiến bộ quan trọng khác là multi-modal data fusion và tích hợp đặc trưng. Thay vì chỉ dựa vào hình ảnh, các hệ thống mới hơn kết hợp thông tin thị giác với các tín hiệu đa phương tiện khác, chẳng hạn như dữ liệu GPS hoặc các mẫu chuyển động từ cảm biến. Bối cảnh bổ sung này giúp hệ thống duy trì độ chính xác dễ dàng hơn khi phương tiện bị che khuất một phần, điều kiện ánh sáng kém hoặc khi góc quay camera thay đổi đột ngột.
Link to this sectionCác điểm chính cần lưu ý#
Nhận dạng lại phương tiện đang trở thành một phương pháp quan trọng trong các hệ thống giao thông thông minh, giúp các thành phố theo dõi phương tiện đáng tin cậy hơn trên các camera khác nhau. Nhờ những tiến bộ trong deep learning và khả năng kiểm chứng tốt hơn bằng các tập dữ liệu đa dạng, phong phú hơn, các hệ thống này đang ngày càng trở nên chính xác và thực tiễn hơn trong các điều kiện thực tế.
Khi công nghệ phát triển, điều quan trọng là phải cân bằng giữa đổi mới và các thực tiễn có trách nhiệm liên quan đến quyền riêng tư, bảo mật và đạo đức. Nhìn chung, những tiến bộ này đang mở đường cho các mạng lưới giao thông thông minh hơn, an toàn hơn và hiệu quả hơn.
Khám phá thêm về AI bằng cách truy cập kho lưu trữ GitHub của chúng tôi và tham gia cộng đồng của chúng tôi. Xem các trang giải pháp của chúng tôi để tìm hiểu về AI trong robot và thị giác máy tính trong sản xuất. Khám phá các tùy chọn cấp phép của chúng tôi để bắt đầu với AI thị giác ngay hôm nay!






