Khám phá phát hiện đối tượng nhỏ với Ultralytics YOLO11
Khám phá cách Ultralytics YOLO11 mang lại khả năng phát hiện đối tượng nhỏ nhanh chóng và chính xác trên các ứng dụng thực tế như giám sát và robot.

Các máy bay không người lái (drone) tích hợp vision AI có thể bay cao hàng trăm mét so với mặt đất nhưng vẫn được kỳ vọng sẽ phát hiện ra một người chỉ xuất hiện dưới dạng vài pixel trong nguồn cấp dữ liệu video. Thực tế, đây là một thách thức phổ biến trong các ứng dụng như robot, giám sát và viễn thám, nơi các hệ thống phải xác định những vật thể rất nhỏ trong ảnh.
Tuy nhiên, các mô hình object detection truyền thống thường gặp khó khăn trong việc này. Các vật thể nhỏ trong hình ảnh và video cung cấp thông tin hình ảnh rất hạn chế. Nói một cách đơn giản, khi một mô hình quan sát chúng, không có nhiều chi tiết để mô hình học hỏi hay nhận diện.
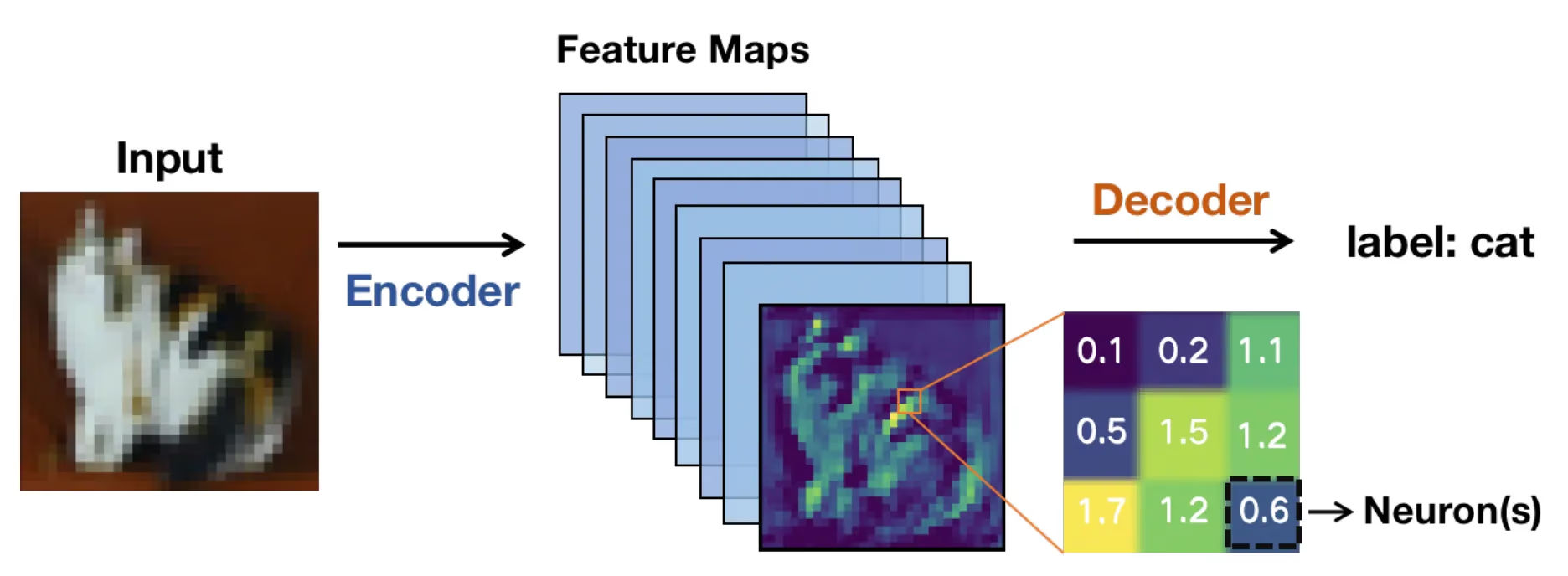
Về cơ bản, các mô hình này thường dựa trên kiến trúc mạng thần kinh tích chập (CNN). Hình ảnh được chuyển qua các lớp của mạng và được biến đổi thành các bản đồ đặc trưng (feature map) hoặc các biểu diễn đơn giản hóa nhằm làm nổi bật các mẫu hình quan trọng thay vì dựa vào các pixel thô.
Khi hình ảnh đi sâu hơn vào mạng, các bản đồ đặc trưng này trở nên nhỏ hơn. Điều đó giúp tăng tốc độ tính toán, nhưng cũng đồng nghĩa với việc các chi tiết nhỏ có thể bị mất đi.
Đối với những vật thể siêu nhỏ, các chi tiết đó vô cùng quan trọng. Một khi các chi tiết này biến mất, mô hình computer vision có thể gặp khó khăn trong việc phát hiện vật thể, dẫn đến các BBox thiếu chính xác hoặc không nhất quán.
Các hệ thống computer vision end-to-end thời gian thực làm cho vấn đề này trở nên phức tạp hơn nữa. Hình ảnh độ phân giải cao giúp bảo toàn chi tiết, nhưng chúng làm chậm quá trình inference và đòi hỏi công suất GPU lớn hơn. Độ phân giải thấp hơn chạy nhanh hơn, nhưng các vật thể nhỏ lại càng khó phát hiện hơn.
Đây trở thành một bài toán cân bằng liên tục giữa tốc độ, độ chính xác và giới hạn phần cứng. Nhờ những tiến bộ công nghệ gần đây, các mô hình computer vision như Ultralytics YOLO11 và Ultralytics YOLO26 sắp ra mắt được thiết kế để quản lý sự đánh đổi này hiệu quả hơn.

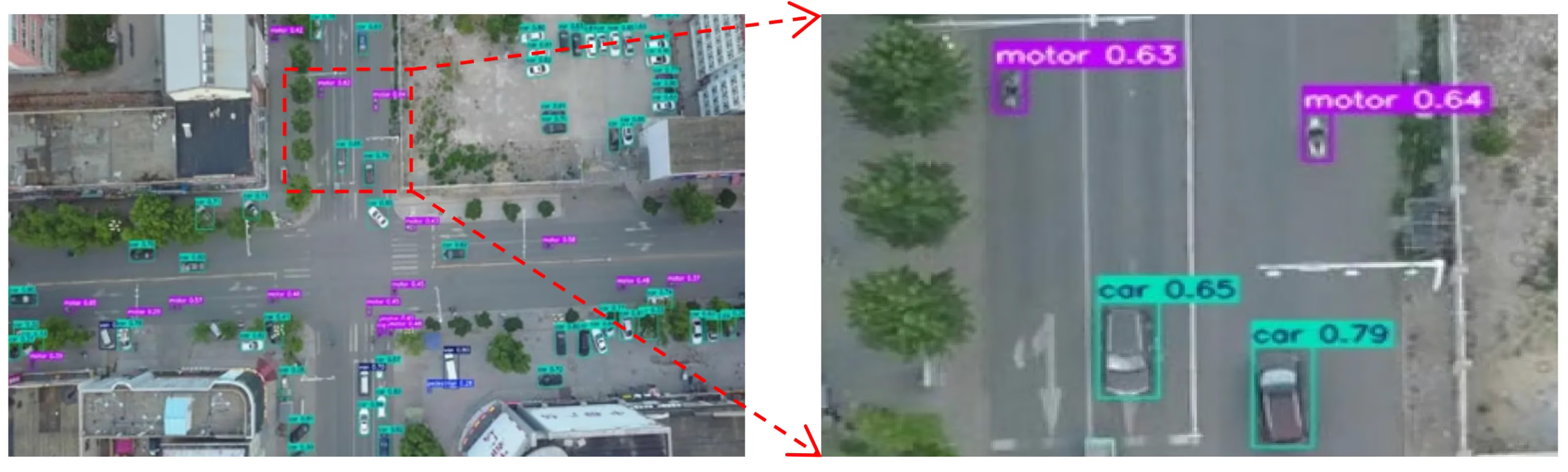
Hình 1. Sử dụng YOLO11 để phát hiện vật thể nhỏ trong hình ảnh từ trên không (Nguồn)
Trong bài viết này, chúng ta sẽ khám phá lý do tại sao phát hiện vật thể nhỏ lại khó khăn và cách YOLO11 có thể giúp công việc đó trở nên dễ dàng hơn. Hãy cùng bắt đầu!
Link to this sectionPhát hiện vật thể nhỏ là gì và tại sao nó lại quan trọng?#
Phát hiện vật thể nhỏ là một tác vụ trong computer vision, một nhánh của AI, tập trung vào việc xác định và định vị các vật thể chiếm một phần rất nhỏ trong ảnh. Các vật thể này thường được thể hiện trong ảnh bằng một số lượng pixel hạn chế, vốn là những đơn vị nhỏ nhất của một hình ảnh kỹ thuật số. Điều này khiến chúng khó phát hiện hơn so với các mục tiêu lớn và rõ ràng hơn (vốn thường chứa nhiều pixel hơn).
Ví dụ, phương tiện trong ảnh chụp từ trên không, công cụ trên sàn nhà máy, hoặc người được ghi lại bởi camera giám sát góc rộng, tất cả đều có thể xuất hiện dưới dạng vật thể nhỏ trong ảnh. Việc phát hiện chúng rất quan trọng vì chúng thường chứa thông tin quan trọng, và nhiều ứng dụng thực tế như giám sát phụ thuộc vào những phát hiện này để vận hành chính xác.
Khi bỏ lỡ các vật thể nhỏ, hiệu suất hệ thống và quá trình ra quyết định có thể bị ảnh hưởng. Giám sát bằng thiết bị bay không người lái (UAV) là một ví dụ điển hình, trong đó việc bỏ lỡ một vật thể di chuyển nhỏ trên mặt đất có thể ảnh hưởng đến khả năng điều hướng hoặc độ chính xác khi theo dõi.
Link to this sectionNhững thách thức liên quan đến việc phát hiện vật thể nhỏ#
Các hệ thống trước đây sử dụng các tính năng thiết kế thủ công và các phương pháp computer vision truyền thống, vốn gặp khó khăn trong những khung cảnh bận rộn hoặc thay đổi liên tục. Ngay cả ngày nay, với việc các mô hình học sâu (deep learning) hoạt động tốt hơn nhiều, việc phát hiện các mục tiêu nhỏ vẫn rất khó khăn khi chúng chỉ chiếm một phần rất nhỏ trong hình ảnh.
Tiếp theo, hãy cùng xem xét một số thách thức phổ biến xuất hiện trong các tình huống thực tế khác nhau khi phát hiện vật thể nhỏ.
Link to this sectionKích thước, pixel và sự mất mát thông tin#
Các vật thể nhỏ chứa rất ít pixel, điều này làm hạn chế lượng chi tiết hình ảnh mà một mô hình có thể học được trong các giai đoạn như trích xuất đặc trưng (feature extraction). Kết quả là, các mẫu hình như cạnh, hình dạng và kết cấu khó phát hiện hơn, khiến các vật thể nhỏ có nhiều khả năng hòa lẫn vào nền.
Khi hình ảnh đi qua các lớp tích chập của một mạng thần kinh, thông tin hình ảnh trong các pixel dần dần được nén thành các bản đồ đặc trưng. Điều này giúp mô hình duy trì hiệu quả, nhưng cũng có nghĩa là các chi tiết nhỏ sẽ mờ dần.
Hình 2. Các bản đồ đặc trưng đại diện cho các mẫu hình ảnh trong một bức ảnh (Nguồn)
Đối với các mục tiêu nhỏ, các tín hiệu quan trọng có thể biến mất trước khi mạng phát hiện có cơ hội xử lý. Khi điều đó xảy ra, việc định vị trở nên kém tin cậy hơn, và các BBox có thể bị lệch, chồng lấp hoặc bỏ lỡ hoàn toàn các vật thể mục tiêu.
Link to this sectionChe khuất, biến đổi tỷ lệ và bối cảnh#
Các thách thức liên quan đến kích thước cũng thường xuất hiện do sự che khuất. Che khuất xảy ra khi các vật thể, đặc biệt là những vật thể nhỏ hơn, bị che khuất một phần bởi các vật thể khác trong khung cảnh.
Điều này làm giảm diện tích hiển thị của mục tiêu, giới hạn thông tin có sẵn cho bộ phát hiện vật thể. Ngay cả một sự che khuất nhỏ cũng có thể gây nhầm lẫn cho các mạng phát hiện, đặc biệt khi kết hợp với đầu vào độ phân giải thấp. Một ví dụ thú vị về điều này có thể thấy trong các bộ dữ liệu UAV như VisDrone, nơi người đi bộ, xe đạp hoặc phương tiện có thể bị chặn một phần bởi các tòa nhà, cây cối hoặc các vật thể di chuyển khác.
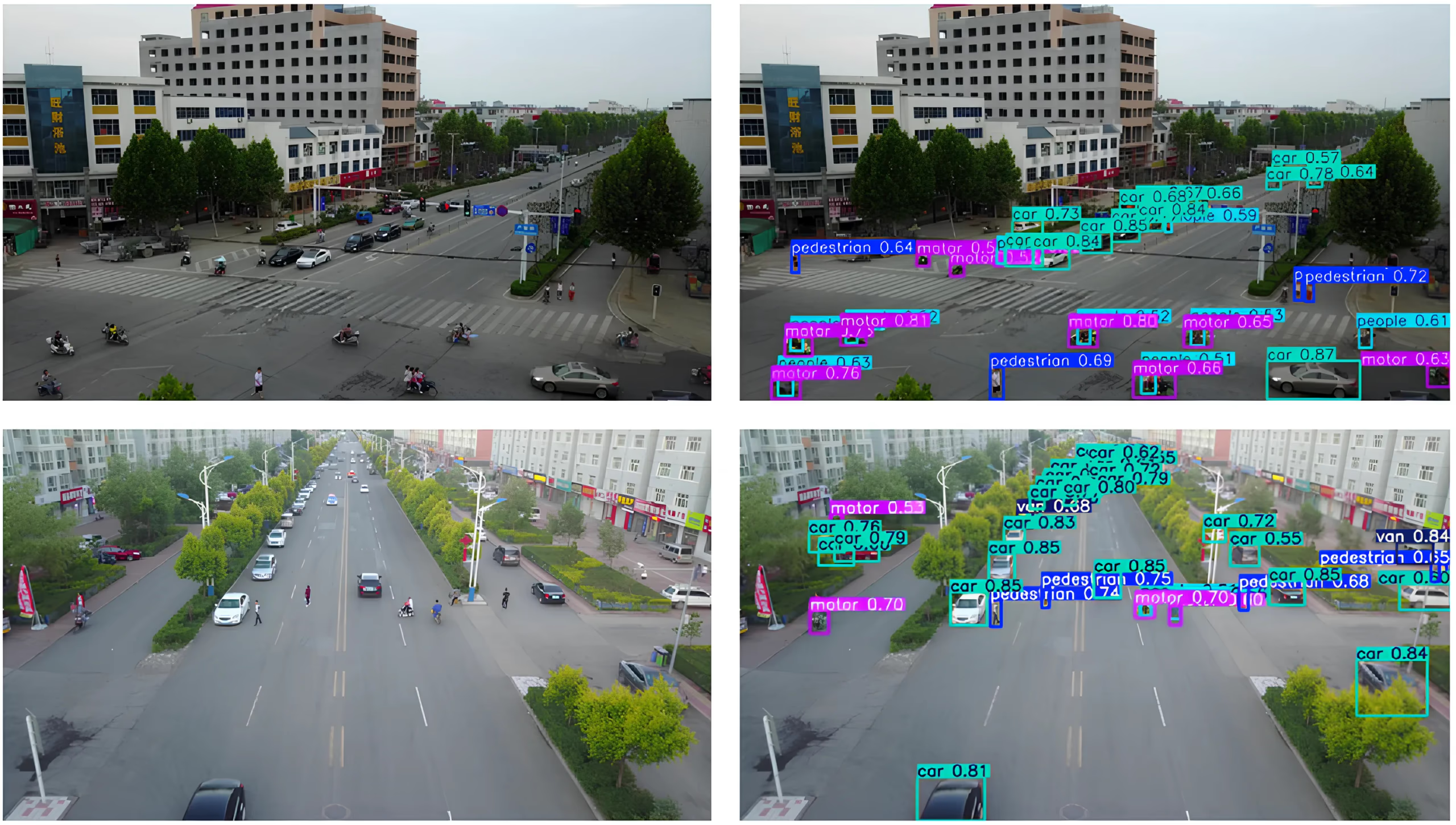
Hình 3. Một ví dụ từ bộ dữ liệu VisDrone cho thấy các vật thể nhỏ (Nguồn)
Tương tự, sự biến đổi tỷ lệ (scale variance) tạo ra một lớp khó khăn khác khi cùng một vật thể xuất hiện rất nhỏ hoặc tương đối lớn tùy thuộc vào khoảng cách và vị trí camera. Bất chấp những rào cản này, các thuật toán phát hiện phải nhận diện được các vật thể nhỏ này trên các tỷ lệ khác nhau mà không làm mất độ chính xác.
Bối cảnh cũng đóng một vai trò quan trọng trong việc phát hiện. Ví dụ, các vật thể lớn thường xuất hiện với môi trường xung quanh rõ ràng cung cấp các tín hiệu hình ảnh hữu ích. Ngược lại, các mục tiêu nhỏ thường thiếu thông tin bối cảnh này, làm cho việc nhận dạng mẫu trở nên khó khăn hơn.
Link to this sectionVấn đề chỉ số ẩn trong phát hiện vật thể nhỏ#
Các chỉ số đánh giá phổ biến, chẳng hạn như Intersection over Union (IoU), đo lường mức độ chồng lấp giữa BBox dự đoán với BBox thực tế. Mặc dù IoU hoạt động tốt với các vật thể lớn, hành vi của nó lại hoàn toàn khác đối với các vật thể nhỏ.
Các vật thể nhỏ chỉ chiếm một vài pixel, vì vậy ngay cả một sự thay đổi nhỏ trong BBox dự đoán cũng có thể tạo ra sai số tỷ lệ lớn và làm giảm mạnh điểm IoU. Điều này có nghĩa là các vật thể nhỏ thường không đáp ứng được ngưỡng IoU tiêu chuẩn để được tính là một dự đoán đúng, ngay cả khi vật thể đó có thể nhìn thấy trong ảnh.
Kết quả là, các lỗi định vị có nhiều khả năng được phân loại là dương tính giả (false positives) hoặc âm tính giả (false negatives). Những hạn chế này đã thúc đẩy các nhà nghiên cứu suy nghĩ lại về cách các hệ thống phát hiện vật thể đánh giá và xử lý các mục tiêu nhỏ, khó phát hiện.
Link to this sectionĐặc trưng đa tỷ lệ: Chìa khóa cho việc phát hiện vật thể nhỏ trong thời gian thực#
Khi các nhà nghiên cứu nỗ lực cải thiện việc phát hiện vật thể nhỏ, rõ ràng là việc bảo tồn và biểu diễn thông tin hình ảnh qua nhiều tỷ lệ là rất cần thiết. Thông tin chi tiết này được phản ánh trong các nghiên cứu gần đây trên arXiv và trong các bài báo được trình bày tại các hội nghị như IEEE International Conferences và European Computer Vision Association (ECCV).
Khi hình ảnh đi sâu hơn vào mạng thần kinh, các vật thể nhỏ có thể mất chi tiết hoặc biến mất hoàn toàn, đó là lý do tại sao các mô hình computer vision hiện đại như YOLO11 tập trung mạnh vào việc trích xuất đặc trưng tốt hơn. Tiếp theo, hãy cùng tìm hiểu các khái niệm cốt lõi đằng sau các bản đồ đặc trưng và mạng kim tự tháp đặc trưng để hiểu rõ hơn về chúng.
Link to this sectionBản đồ đặc trưng và biểu diễn tỷ lệ#
Khi một hình ảnh đầu vào, chẳng hạn như hình ảnh viễn thám, đi vào một mạng thần kinh, nó dần dần được biến đổi thành các bản đồ đặc trưng. Đây là những biểu diễn đơn giản hóa của hình ảnh làm nổi bật các mẫu hình ảnh như cạnh, hình dạng và kết cấu.
Khi mạng đi sâu hơn, các bản đồ đặc trưng này trở nên nhỏ hơn về kích thước không gian. Việc giảm bớt này giúp mô hình chạy hiệu quả và tập trung vào thông tin cấp cao. Tuy nhiên, việc thu nhỏ và các bản đồ đặc trưng sâu cũng làm giảm chi tiết không gian.
Hình 4. Trích xuất đặc trưng là chìa khóa để phát hiện vật thể nhỏ. (Nguồn)
Trong khi các vật thể lớn giữ đủ thông tin hình ảnh để phát hiện chính xác, các mục tiêu nhỏ có thể mất các chi tiết quan trọng chỉ sau vài lớp mạng. Khi điều này xảy ra, mô hình có thể gặp khó khăn để nhận ra rằng một vật thể nhỏ thậm chí còn tồn tại. Đây là một trong những lý do chính khiến các vật thể nhỏ bị bỏ lỡ trong các mô hình phát hiện vật thể sâu.
Link to this sectionMạng kim tự tháp đặc trưng và học tập đa tỷ lệ#
Mạng kim tự tháp đặc trưng, thường được gọi là FPN, được giới thiệu để giải quyết tình trạng mất chi tiết không gian. Chúng hoạt động như một mô-đun hỗ trợ kết hợp thông tin từ nhiều lớp để mô hình có thể phát hiện các vật thể nhỏ hiệu quả hơn. Quá trình này còn được gọi là tổng hợp đặc trưng (feature aggregation) và hợp nhất đặc trưng (feature fusion).
Các lớp nông cung cấp chi tiết không gian tinh vi, trong khi các lớp sâu hơn bổ sung bối cảnh ngữ nghĩa, cho phép học tập đặc trưng đa tỷ lệ hiệu quả. Không giống như phương pháp lấy mẫu nâng cao (upsampling) thông thường chỉ đơn giản là phóng to các bản đồ đặc trưng, FPN bảo tồn thông tin có ý nghĩa và cải thiện việc phát hiện vật thể nhỏ.
Các phương pháp tiếp cận hiện đại xây dựng dựa trên ý tưởng này bằng cách sử dụng hợp nhất đặc trưng thích ứng và các thiết kế nhận thức bối cảnh để nâng cao hơn nữa việc phát hiện các mục tiêu nhỏ. Nói cách khác, FPN giúp các mô hình nhìn thấy cả bức tranh toàn cảnh và các chi tiết nhỏ cùng một lúc. Sự tối ưu hóa này là cần thiết khi các vật thể có kích thước nhỏ.
Link to this sectionCách các mô hình phát hiện vật thể đã phát triển để xử lý các vật thể nhỏ#
Dưới đây là cái nhìn thoáng qua về cách các mô hình phát hiện vật thể đã phát triển và tiến bộ theo thời gian để phát hiện tốt hơn các vật thể có kích thước khác nhau, bao gồm cả những vật thể rất nhỏ:
- Các phương pháp phát hiện sớm: Các cách tiếp cận phát hiện vật thể sớm dựa trên các tính năng được thiết kế thủ công và các thuật toán dựa trên quy tắc bắt nguồn từ xử lý ảnh cổ điển. Vì các tính năng này đã được cố định, hiệu suất bị suy giảm với các hình ảnh khác nhau.
- Sự ra đời của học máy và học sâu: Việc áp dụng học máy và học sâu đã đánh dấu một bước chuyển mình lớn trong nghiên cứu phát hiện vật thể. Thay vì dựa vào các quy tắc được xác định trước, các mạng thần kinh đã học các biểu diễn hình ảnh trực tiếp từ dữ liệu huấn luyện, cải thiện khả năng thích ứng trên các kích thước vật thể và khung cảnh khác nhau.
- Mạng tích chập: Các mạng thần kinh này học cách nhìn thấy các mẫu hình trong hình ảnh. Mỗi lớp thu nhận các chi tiết khác nhau, bắt đầu từ các cạnh và màu sắc đơn giản, sau đó đến hình dạng và cuối cùng là các vật thể hoàn chỉnh, khiến chúng trở nên thiết yếu đối với computer vision hiện đại.
- Bộ phát hiện vật thể hai giai đoạn: Các bộ phát hiện hai giai đoạn, chẳng hạn như Faster R-CNN, được giới thiệu bởi Girshick và Ren, trước tiên tạo ra các vùng ứng viên và sau đó phân loại chúng. Cách tiếp cận này đã cải thiện độ chính xác cho các vật thể nhỏ nhưng lại làm tăng chi phí tính toán và giảm hiệu suất thời gian thực.
- Bộ phát hiện vật thể một giai đoạn: Các bộ phát hiện một giai đoạn, chẳng hạn như SSD (Single-Shot Detector) và gia đình YOLO (You Only Look Once), bao gồm YOLOv3, Ultralytics YOLOv5 và sau đó là Ultralytics YOLOv8, thực hiện phát hiện chỉ trong một lần truyền. Thiết kế này cải thiện đáng kể tốc độ inference trong khi vẫn duy trì độ chính xác cạnh tranh.
- Các mô hình tiên tiến nhất hiện nay: Các mô hình phát hiện vật thể mới hơn tập trung mạnh mẽ hơn vào hiệu suất thời gian thực và triển khai ở biên (edge deployment). Các bản phát hành mô hình Ultralytics YOLO gần đây, chẳng hạn như Ultralytics YOLO11 và sắp tới là Ultralytics YOLO26, được thiết kế để cân bằng giữa độ chính xác cao và inference độ trễ thấp, khiến chúng rất phù hợp để phát hiện vật thể ở mọi kích thước, bao gồm các mục tiêu nhỏ, trên các thiết bị có tài nguyên tính toán hạn chế.
Link to this sectionSử dụng YOLO11 cho các trường hợp sử dụng phát hiện vật thể nhỏ#
Bây giờ khi chúng ta đã hiểu rõ hơn về cách thức hoạt động của việc phát hiện vật thể nhỏ, hãy cùng xem xét một vài ứng dụng thực tế nơi YOLO11 có thể được áp dụng.
Link to this sectionUAV và hình ảnh từ trên không#
Hãy tưởng tượng một chiếc drone bay cao phía trên một con phố sầm uất. Từ độ cao đó, ô tô, xe đạp và thậm chí cả con người bị thu nhỏ lại chỉ còn vài pixel trên màn hình.
Các mô-đun hình ảnh UAV và trên không thường ghi lại những cảnh như thế này, nơi các vật thể quan tâm rất nhỏ và bị bao quanh bởi các bối cảnh phức tạp, khiến các mô hình computer vision khó phát hiện.
Trong những loại tình huống này, YOLO11 có thể là lựa chọn mô hình lý tưởng. Ví dụ, một chiếc drone được trang bị mô hình như YOLO11 có thể theo dõi giao thông theo thời gian thực, phát hiện phương tiện, người đi xe đạp và người đi bộ khi họ di chuyển trong cảnh, ngay cả khi mỗi vật thể chỉ chiếm một phần nhỏ trong hình ảnh. Điều này cho phép ra quyết định nhanh hơn và thông tin chi tiết chính xác hơn trong các ứng dụng như quản lý giao thông, an toàn công cộng hoặc quy hoạch đô thị.
Link to this sectionRobot và tự động hóa#
Robot thường được sử dụng trong các môi trường mà độ chính xác và thời gian là rất quan trọng. Trong các môi trường như nhà kho, nhà máy và nông trại, robot có thể cần nhận diện các vật thể rất nhỏ, chẳng hạn như một linh kiện trên dây chuyền lắp ráp, một nhãn trên gói hàng hoặc một nụ cây nhỏ trên đồng ruộng, và phản ứng nhanh chóng.
Việc phát hiện các vật thể có kích thước này có thể phức tạp, đặc biệt khi chúng chỉ xuất hiện dưới dạng vài pixel trong nguồn cấp dữ liệu camera hoặc bị che khuất một phần bởi các vật thể khác. Bỏ lỡ các chi tiết nhỏ này có thể làm chậm quá trình tự động hóa hoặc ảnh hưởng đến khả năng hoàn thành nhiệm vụ của robot.
YOLO11 có thể tạo ra sự khác biệt trong các tình huống này. Khả năng trích xuất đặc trưng được cải thiện và inference nhanh chóng cho phép robot phát hiện các vật thể nhỏ trong thời gian thực và hành động ngay lập tức.
YOLO11 cũng hỗ trợ instance segmentation, giúp robot hiểu rõ ranh giới vật thể và điểm gắp chính xác hơn thay vì chỉ xác định các BBox chung. Ví dụ, một cánh tay robot tích hợp YOLO11 có thể phát hiện các linh kiện nhỏ trên băng tải, phân đoạn chính xác hình dạng của chúng và gắp chúng trước khi chúng di chuyển ra ngoài tầm với, giúp hệ thống duy trì hiệu quả và độ tin cậy.
Link to this sectionĐiều gì làm cho YOLO11 hiệu quả trong việc phát hiện vật thể nhỏ#
Với rất nhiều mô hình computer vision hiện có ngày nay, bạn có thể tự hỏi điều gì làm cho Ultralytics YOLO11 trở nên nổi bật.
Dưới đây là một vài lý do tại sao Ultralytics YOLO11 là một lựa chọn tuyệt vời cho các ứng dụng cần phát hiện vật thể nhỏ:
- Trích xuất đặc trưng tốt hơn: YOLO11 sử dụng kiến trúc backbone và neck cải tiến để tăng cường khả năng trích xuất đặc trưng, cho phép phát hiện vật thể chính xác hơn.
- Hệ sinh thái và tính dễ sử dụng: Gói Python của Ultralytics là một thư viện cung cấp các hàm tích hợp sẵn để tải, huấn luyện, xác thực và triển khai các mô hình như YOLO11. Vì các quy trình này chỉ yêu cầu một vài dòng mã, các đội ngũ có thể nhanh chóng thử nghiệm và tinh chỉnh các mô hình để phát hiện vật thể nhỏ.
- Tối ưu hóa cho triển khai tại biên (edge): YOLO11 có thể chạy hiệu quả trên các thiết bị biên như NVIDIA Jetson, Raspberry Pi và các hệ thống camera công nghiệp. Nói đơn giản, nó cho phép các tác vụ vision AI thời gian thực ngay trên thiết bị.
Link to this sectionCác chiến lược thực tế nên áp dụng khi phát hiện vật thể nhỏ với YOLO11#
Ngoài việc sử dụng một mô hình như YOLO11, cách bạn chuẩn bị chú thích, toàn bộ tập dữ liệu và quy trình huấn luyện mô hình có thể tạo ra sự khác biệt đáng kể về hiệu suất phát hiện.
Dưới đây là tổng quan nhanh về những gì cần tập trung vào:
- Tăng cường dữ liệu (data augmentation) phù hợp: Việc tăng cường dữ liệu nhẹ, chẳng hạn như thay đổi tỷ lệ hoặc cắt ảnh, có thể giúp mô hình tổng quát hóa tốt hơn với các hình ảnh mới. Tuy nhiên, việc tăng cường quy mô lớn mạnh mẽ có thể làm biến dạng hoặc loại bỏ các vật thể nhỏ, khiến chúng trở nên khó học hơn đối với mô hình.
- Xem xét các trường hợp thất bại: Phân tích những nơi mô hình bỏ lỡ hoặc nhận diện sai vật thể giúp tạo ra một cơ sở so sánh và tiết lộ xem các vấn đề xuất phát từ tập dữ liệu, thông tin bị mất trong quá trình trích xuất đặc trưng, hay cần điều chỉnh các cài đặt huấn luyện.
- Thành phần tập dữ liệu: Tập dữ liệu của bạn nên chứa đủ các ví dụ về vật thể nhỏ để mô hình có thể học được các mẫu hình có ý nghĩa, đồng thời cần được cân bằng để các vật thể lớn không lấn át các vật thể nhỏ hơn trong quá trình huấn luyện.
Link to this sectionCác điểm chính cần lưu ý#
Phát hiện vật thể nhỏ rất khó khăn vì các mục tiêu nhỏ bị mất chi tiết khi hình ảnh đi qua một mô hình computer vision. YOLO11 cải thiện cách thức bảo toàn các chi tiết này, giúp việc phát hiện vật thể nhỏ trở nên đáng tin cậy hơn mà không làm giảm hiệu suất thời gian thực. Sự cân bằng này cho phép YOLO11 hỗ trợ phát hiện chính xác và hiệu quả trong các ứng dụng thực tế.
Hãy tham gia cộng đồng đang phát triển của chúng tôi! Khám phá kho lưu trữ GitHub của chúng tôi để tìm hiểu thêm về AI. Khám phá những đổi mới như thị giác máy tính trong bán lẻ và AI trong ngành ô tô bằng cách truy cập các trang giải pháp của chúng tôi. Để bắt đầu xây dựng với thị giác máy tính ngay hôm nay, hãy xem qua các tùy chọn cấp phép của chúng tôi.






