如何提高模型在小物体上的 mAP:快速指南
了解如何通过关于数据质量、增强、训练策略、评估和部署的实用技巧来提高模型在小物体上的 mAP。
随着人工智能(AI)、机器学习和计算机视觉的普及,目标检测系统已被广泛应用,从智能交通摄像头到无人机以及零售分析工具。通常,人们期望这些系统能够检测各种尺寸的目标,无论是靠近摄像头的重型卡车,还是远处的微小行人。
通常情况下,识别大型且清晰可见的目标较为简单。相比之下,检测小目标则更具挑战性。
当目标仅占据图像的一小部分时,可用的视觉信息非常有限。交通监控视频中远处的行人或航拍视角中的小型车辆可能仅包含几个像素,但这些像素却承载着关键信息。
像Ultralytics YOLO模型这样的计算机视觉模型依赖视觉模式来识别目标,而当这些模式受限或不清晰时,性能就会下降。重要的细节在处理过程中可能会丢失,从而使预测对定位误差更加敏感。即使边界框(BBox)发生轻微偏移,也可能导致正确的检测变为漏检。
当我们观察模型性能时,这种差距显而易见。大多数检测和分割模型在处理中型和大型目标时表现良好,但小目标往往会降低整体准确率。
深度学习的性能通常通过平均精确率均值(即mAP)来衡量。该指标既反映了检测的准确度,也反映了预测框与实际目标的一致性。
它结合了精确率(Precision,显示预测的目标中有多少是正确的)和召回率(Recall,显示实际目标中有多少被成功检测到),并在不同的置信度水平和交并比(IoU,即衡量预测边界框与真实框重叠程度的指标)阈值下进行计算。
此前,我们探讨过小目标检测及其对计算机视觉模型而言为何是一个难题。在本文中,我们将在此基础上,重点讨论如何针对小目标提高mAP。让我们开始吧!
Link to this section为什么小目标更难检测?#
在涉及目标检测的应用中,小目标的定义取决于它在图像中占据的空间大小,而不一定是指人眼看起来有多小。如果它只占据图像的一小部分,那么包含的视觉信息就非常少,这使得计算机视觉算法难以准确地进行检测。
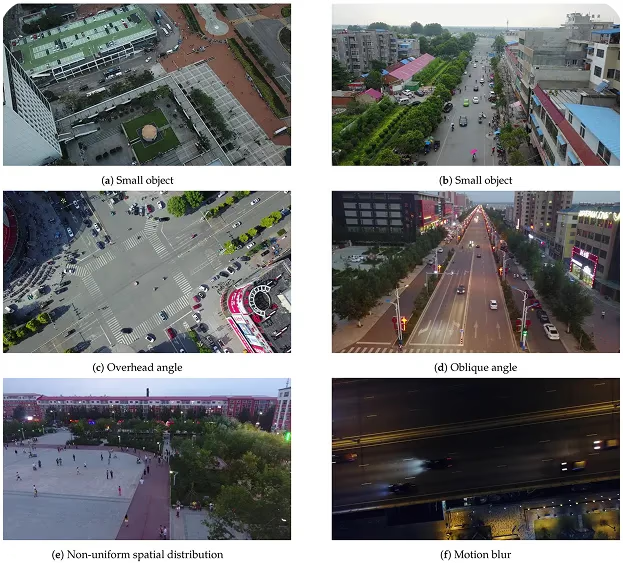
图1. 显示小目标占据有限像素区域的示例图像(来源)
由于可利用的像素较少,边缘、形状和纹理等重要细节可能变得不清晰或极易丢失。当图像由模型处理时,为了突出有用的模式,图像会被缩放和简化。
虽然这有助于模型理解整体场景,但也可能进一步减少精细细节。对于小目标而言,这些细节通常是准确检测的关键。
在观察评估指标时,这些挑战变得更加明显。小目标对定位误差尤为敏感。即使是轻微错位的边界框也可能落入所需的交并比(IoU)阈值以下。
当这种情况发生时,看起来合理的预测可能会被计为不正确。这会降低精确率和召回率,最终导致平均精确率均值(mAP)降低。
由于这些因素紧密相连,提高性能通常需要从整个系统的角度进行考量。这意味着需要仔细平衡图像分辨率、特征提取、模型设计和评估设置,以便更好地保留和解读细微的视觉细节。
Link to this section数据集质量和标注的重要性#
在小目标检测方面,数据集的质量通常对性能影响最大。小目标仅占据图像的一小部分,这意味着模型可用于学习的视觉信息非常少。因此,训练数据变得格外重要。如果数据集没有包含足够清晰且具有代表性的示例,目标检测模型将难以识别出一致的模式。
适用于小目标检测的数据集通常包含高分辨率图像、频繁出现的小目标以及一致的视觉条件。虽然像COCO数据集这样的通用数据集是一个有用的起点,但它们往往无法匹配特定实际应用场景的规模、密度或背景。在这种情况下,收集特定领域的训练数据对于提高模型性能就变得很有必要。
标注质量也起着关键作用。标注通过指定正确的目标标签和边界框位置来建立“真值”(ground truth),模型正是通过这些真值来学习预测。
对于小目标,边界框必须绘制得仔细且一致。即使边界框放置位置有细微差别,也会明显影响定位准确性,因为小目标对像素级的偏移高度敏感。
糟糕或不一致的标注会显著降低mAP。如果目标被错误标注,模型会学习到错误的模式,这可能增加误报。
如果图像中出现了目标但没有被纳入真值,那么在评估过程中,正确的检测可能会被算作误报。这两种情况都会降低整体性能。
有趣的是,近期研究表明,在标准基准测试中,小目标的平均精确率往往维持在20%到40%之间,显著低于大目标。这一差距凸显了数据集设计和标注一致性对于整体检测准确率的重要性。
Link to this section数据增强在提高准确率方面可发挥关键作用#
在更好地理解了数据集质量和标注一致性的重要性后,让我们看看目标检测模型如何从现有数据中更有效地学习。即使收集额外图像有困难或成本高昂,仍然可以通过更好地利用现有数据来提升性能。
最实用的方法之一是数据增强。它在小目标检测中尤为重要,因为小目标为模型提供的可学习视觉线索更少。通过在训练过程中引入受控的变化,增强技术可以帮助模型更好地泛化,而无需进行新的数据收集。
有效的数据增强专注于保持小目标的清晰可见。诸如受控缩放、轻微裁剪和图像平铺(tiling)等技术,可以在保持小目标形状和外观的同时,使它们更加突出。目标是帮助模型在不改变真实情况外观的前提下,更频繁地在略有不同的条件下观察到小目标。
然而,增强技术的应用需要谨慎。某些转换可能会降低小目标的可见度,或者以在真实数据中不太可能发生的方式改变它们的外观。一旦发生这种情况,模型可能难以学习准确的目标边界。
Link to this section利用生成式AI实现更智能的数据增强#
另一种日益流行的有趣数据增强方式是使用生成式AI来创建合成训练数据。团队无需依赖人工收集和标注图像,现在可以生成模拟特定环境、目标尺寸、光照条件和背景变化的真实场景。
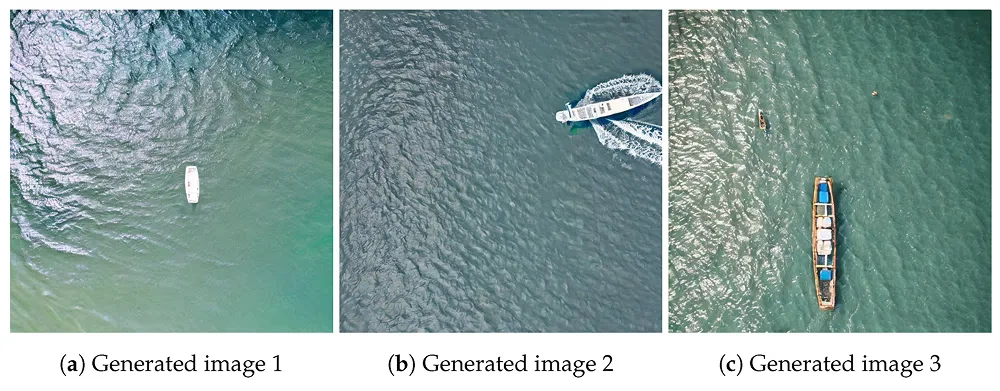
图2. 用于数据增强的合成航拍图像(来源)
这种方法对于小目标检测特别有用,因为真实世界的示例可能难以持续捕捉到。通过控制合成图像中小目标的呈现方式,例如调整尺寸、密度和位置,可以让模型接触到更广泛的训练场景。
当与真实数据结合得当,合成增强可以提高模型的鲁棒性,降低数据收集成本,并支持更具针对性的性能改进。
Link to this section会影响小目标mAP的模型训练选择#
除数据集质量和标注一致性外,模型训练选择也对小目标检测性能产生深远影响。
以下是一些需要考虑的关键训练策略:
- 从预训练模型开始: 预训练模型(如Ultralytics YOLO26)已经从大型图像数据集中学习了通用的视觉模式。这提供了一个强有力的起点,而不是从零开始训练,这在数据有限的情况下检测小目标时尤其有帮助。
- 战略性地使用迁移学习: 迁移学习意味着将预训练模型适应于你的特定数据集。它有助于模型专注于你的小目标,同时减少过拟合(即死记硬背训练数据而不是学习通用模式)。
- 解决类别不平衡问题: 如果小目标出现的频率低于大目标,模型可能会优先学习识别大目标。类别权重调整或采样策略等技术有助于确保小目标不会被忽视。
- 调整置信度和IoU阈值: 小目标对微小的定位误差非常敏感。微调这些阈值有助于在验证和推理过程中更好地评估和解读小目标的性能。
Link to this section针对小目标检测的模型架构考量#
虽然你可以使用通用目标检测模型来处理小目标任务,但也有专门为改进小目标检测而设计的模型架构。例如,Ultralytics YOLOv8模型存在P2模型变体,它们针对保留精细的空间细节进行了优化。
YOLOv8通过在网络层层深入时逐渐缩小图像来处理多个尺度的图像。这有助于模型理解整体场景,但也降低了精细细节。
当目标已经非常小时,重要的视觉信息可能会在此过程中消失。Ultralytics YOLOv8的P2变体通过在其特征金字塔中使用步长(stride)为2的结构来解决这一问题。
特征金字塔是模型中分析多个内部分辨率下图像的部分,从而使其能够检测不同大小的目标。由于步长为2,图像在此阶段被更缓慢地缩小,从而保留了更多原始的像素级细节。
因为保留了更多的空间细节,小目标在网络内部保留了更可见的结构。这使得模型更容易定位和检测那些仅占据少量像素的目标,从而有助于提高小目标的mAP。
Link to this section针对小目标检测的尺寸感知评估#
虽然平均精确率均值(mAP)总结了整体模型性能,但它并不总是能展示模型处理不同尺寸目标的能力。对于小目标,性能通常受限于定位准确性而非仅是分类,这意味着边界框的轻微偏移可能会显著影响结果。
换句话说,模型可能正确识别了目标的类别,但如果预测的边界框稍微错位,检测仍可能被视为不正确。由于小目标仅覆盖少量像素,边界框位置的轻微偏差就可能导致预测框与真值之间的重叠度显著降低。因此,即使目标被正确识别,评估分数也可能下降。
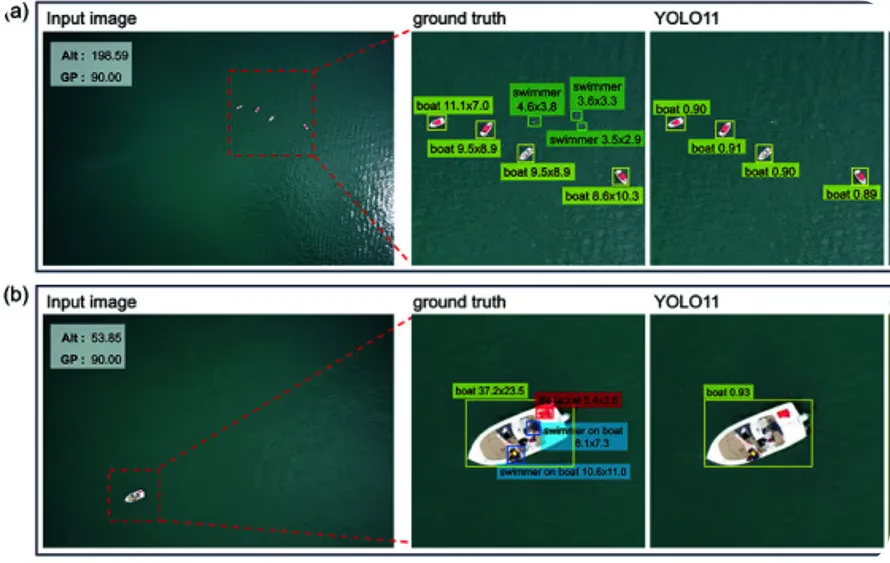
图3. 评估小目标检测可能很棘手(来源)
一种更具信息量的方法是按目标尺寸来评估性能。大多数广泛使用的基准测试会分别报告针对小、中、大目标的平均精确率。
这种按尺寸细分的评估提供了更清晰的视角,可以看出模型在何处表现良好,在何处存在不足。在实践中,小目标AP往往滞后于整体mAP,凸显了在汇总指标中可能不明显的定位挑战。
Link to this section考虑部署限制和实际权衡#
从受控测试环境移动到实际部署时,模型性能往往会发生变化。图像分辨率、处理速度和可用硬件等因素引入了直接影响小目标检测的权衡。
例如,提高输入分辨率可以提高小目标mAP,因为小目标占据了更多的像素并保留了更多细节。然而,更高的分辨率也会增加内存使用量和处理时间。这可能会减慢推理速度并提高运营成本。
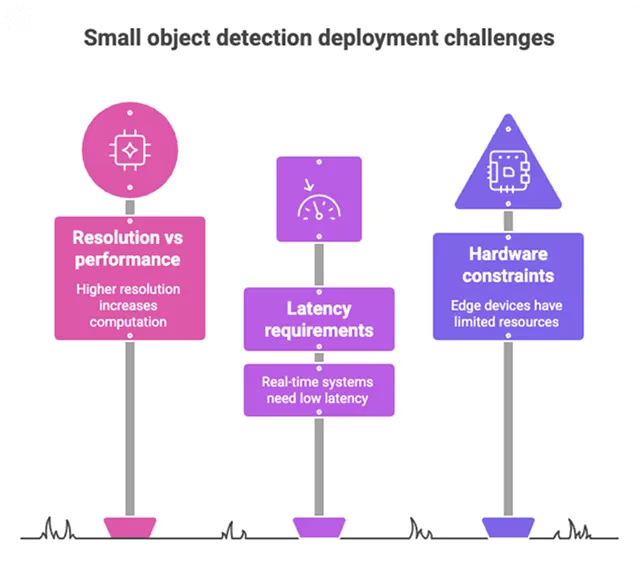
图4. 小目标检测部署挑战。图片来自作者。
硬件选择在管理这些权衡中发挥关键作用。更强大的GPU允许运行更大的模型并实现更快的处理,但部署环境(特别是边缘设备)通常计算和内存资源有限。
实时应用增加了另一个约束:保持低延迟可能需要减小模型尺寸或降低输入分辨率,这可能会对小目标的召回率产生负面影响。最终,部署决策需要在检测性能与硬件限制、速度要求和整体成本之间取得平衡。
Link to this section总结:提高小目标模型的mAP#
提高小目标检测需要实用且结构化的方法,特别是在实际环境中使用时。以下是需要记住的主要步骤概述:
- 审计数据集质量: 确保你的数据集包含足够的小目标示例,尽可能使用高分辨率图像,并反映模型将要部署的实际条件。
- 验证标注一致性: 确保边界框准确、完整且标注一致。标注不一致会直接限制定位性能。
- 谨慎调整训练设置: 认真调整批次大小(batch size)、训练轮数(epochs)和优化设置,以便在训练过程中充分体现小目标。
- 循序渐进地迭代: 进行受控调整,测量其影响,并完善你的方法。稳健、数据驱动的迭代会随着时间推移带来持续的进步。
Link to this section关键要点#
提高小目标的mAP需要结构化、数据驱动的方法,而不是随意的调整。真正的改进来自于结合高质量数据、一致的标注、认真的训练和正确的评估方法。在实际项目中,稳步的测试和微小但可衡量的改变,是随着时间推移实现更好、更可靠的小目标检测的关键。
加入我们不断发展的 community,并探索我们的 GitHub repository 以获取实用的 AI 资源。想要立即开始构建视觉 AI,请查看我们的 licensing options。访问我们的解决方案页面,了解 AI in agriculture 如何改变农业,以及 vision AI in robotics 如何塑造未来。






