الاستفادة من التعلم التعزيزي في مشاريع الرؤية الحاسوبية
اكتشف كيف يساعد التعلم التعزيزي في تطبيقات الرؤية الحاسوبية الأنظمة على الرؤية، واتخاذ القرارات، والتحسن في تطبيقات العالم الحقيقي عبر مختلف الصناعات.

تتمثل الطريقة المباشرة لشرح الذكاء الاصطناعي (AI) في كونه مجالًا يركز على محاكاة كيفية تفكير البشر وتعلمهم. ومن هنا تأتي فكرة تقنيات التعلم في الذكاء الاصطناعي، وهي أساليب متنوعة تسمح للآلات بتحسين أدائها بمرور الوقت، تمامًا كما يفعل البشر.
سبق أن استكشفنا تقنيات تعلم الذكاء الاصطناعي الرئيسية، بما في ذلك التعلم الخاضع للإشراف، والتعلم غير الخاضع للإشراف، والتعلم التعزيزي، والتعلم بالنقل، وكيف يلعب كل منها دورًا مهمًا في مساعدة نماذج الذكاء الاصطناعي على معالجة المعلومات واتخاذ القرارات.
اليوم، سنلقي نظرة فاحصة على التعلم التعزيزي، وهو أسلوب يُعلّم أنظمة الذكاء الاصطناعي التعلم من خلال التجربة عبر التفاعل مع البيئة والتحسين بناءً على الملاحظات. وبشكل خاص، سنستكشف كيفية تطبيق التعلم التعزيزي في تطبيقات الرؤية الحاسوبية - وهي الأنظمة التي تمكّن الآلات من تفسير وفهم المعلومات المرئية من العالم.
إن الجمع بين مفاهيم مثل التعلم التعزيزي والرؤية الحاسوبية يفتح آفاقًا جديدة ومثيرة، وهو مجال نشط للبحث. إذ يمكّن هذا الجمع أنظمة الذكاء الاصطناعي من التعرف على ما تراه واتخاذ قرارات مستنيرة بناءً على تلك المعلومات المرئية.
Link to this sectionما هو التعلم التعزيزي؟#
التعلم التعزيزي هو فرع من فروع تعلم الآلة حيث يتعلم وكيل الذكاء الاصطناعي من خلال اتخاذ إجراءات وتلقي ملاحظات في شكل مكافآت أو عقوبات. الهدف هو معرفة الإجراءات التي تؤدي إلى أفضل النتائج بمرور الوقت.
يمكنك التفكير في التعلم التعزيزي كتدريب كلب. عندما يجلس الكلب بناءً على أمر، فإنك تمنحه مكافأة. وبعد فترة، يتعلم الكلب أن الجلوس يؤدي إلى الحصول على مكافأة. في التعلم التعزيزي، يكون وكيل الذكاء الاصطناعي أو النموذج بمثابة الكلب؛ والبيئة هي العالم من حوله، وتساعده المكافأة على فهم ما إذا كان قد اتخذ الخطوة الصحيحة.
يختلف هذا عن التعلم الخاضع للإشراف، حيث يتم عرض العديد من الأمثلة للإجابات الصحيحة على نموذج الذكاء الاصطناعي. على سبيل المثال، قد يتم عرض صورة لكلب على النموذج ويُقال له: "هذا كلب".
من ناحية أخرى، لا يعتمد التعلم التعزيزي على بيانات مصنفة. وبدلاً من ذلك، يتضمن التعلم من خلال تجربة إجراءات مختلفة والتعلم من النتائج، تمامًا مثل لعب لعبة ومعرفة الحركات التي تساعدك على الفوز.
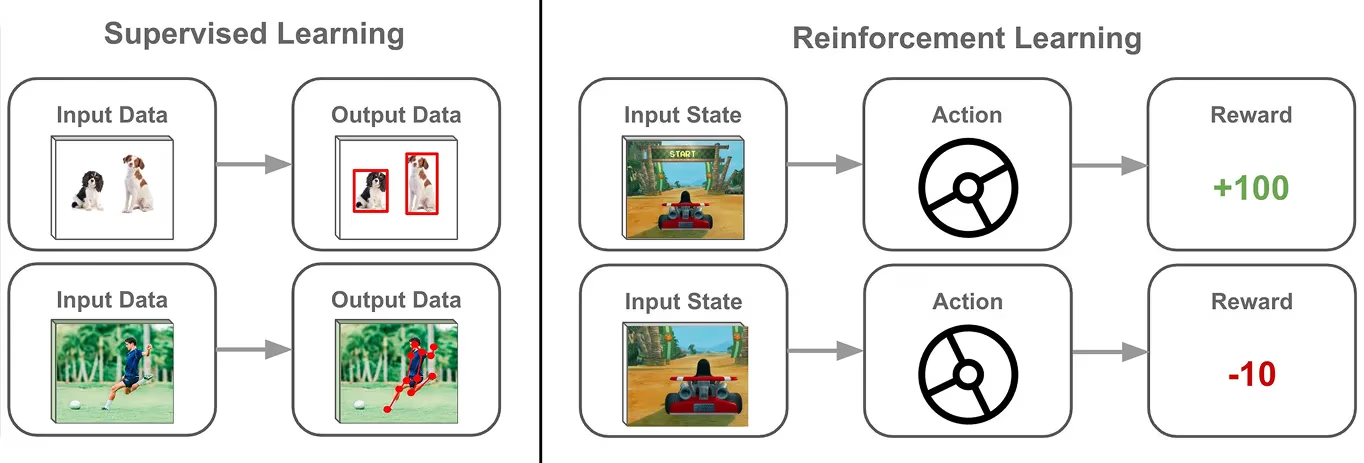
الشكل 1. التعلم التعزيزي مقابل التعلم الخاضع للإشراف.
يعد التعلم التعزيزي أمرًا بالغ الأهمية للمهام التي يتم فيها اتخاذ القرارات خطوة بخطوة، حيث يغير كل اختيار ما يحدث بعد ذلك. يُستخدم هذا النوع من التعلم في ألعاب الفيديو الاستراتيجية لجعل اللعب أكثر تحديًا وجاذبية للاعبين.
Link to this sectionكيف يعمل التعلم التعزيزي في حلول الذكاء الاصطناعي#
فكر في كيفية تعلم ركوب الدراجة. في البداية، قد تسقط. ولكن مع الممارسة، تبدأ في معرفة ما يساعدك على البقاء متوازنًا. كلما زادت ممارستك، أصبحت أفضل. أنت تتعلم من خلال الممارسة، وليس فقط من خلال إخبارك بما يجب عليك فعله.
يعمل التعلم التعزيزي بطريقة مماثلة للذكاء الاصطناعي. فهو يتعلم من خلال التجربة - عبر تجربة إجراءات مختلفة، ومراقبة ما يحدث، والتحسن التدريجي في قدرته على اتخاذ الخيارات الصحيحة بمرور الوقت.
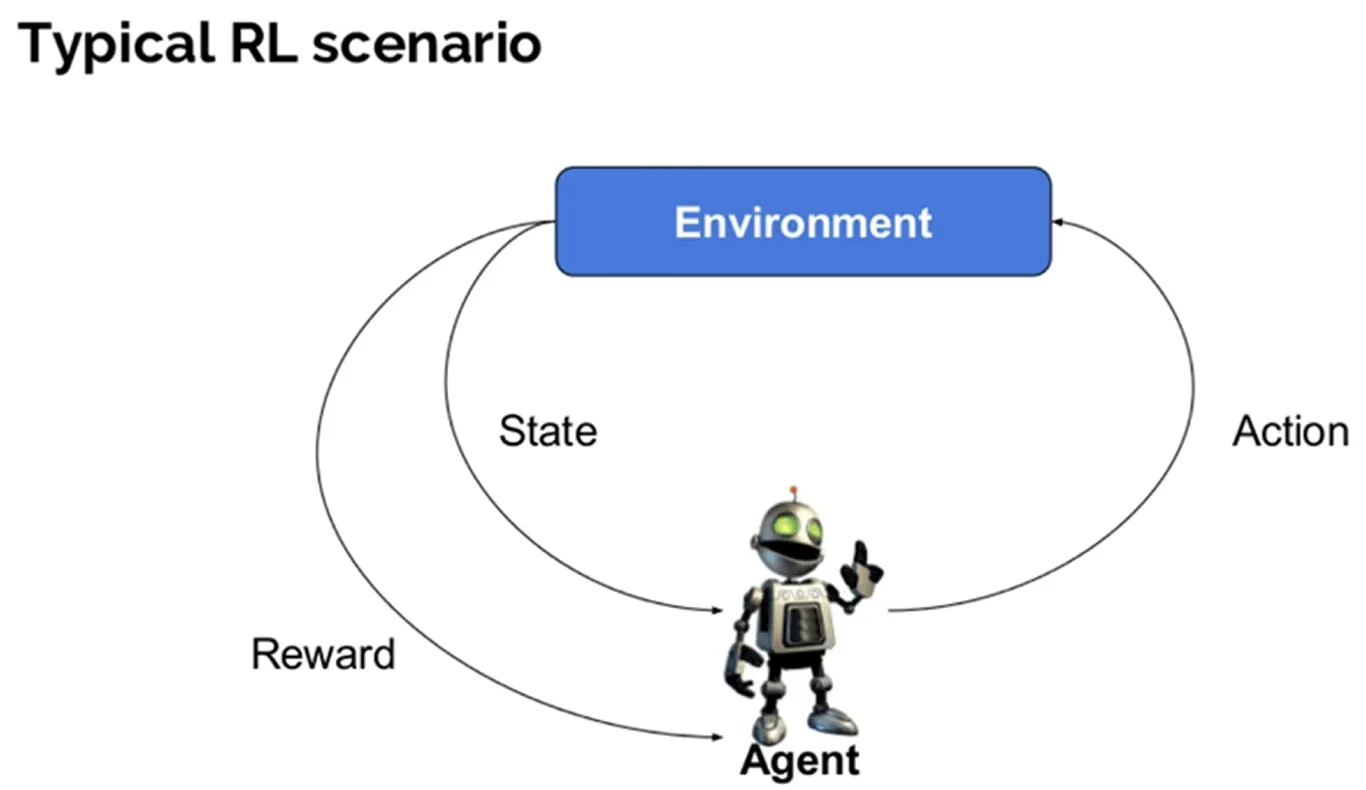
الشكل 2. فهم كيفية عمل التعلم التعزيزي.
إليك نظرة على بعض المكونات الرئيسية للتعلم التعزيزي:
- الوكيل (Agent): الوكيل هو المتعلم أو صانع القرار. وهو يتفاعل مع البيئة من خلال اتخاذ إجراءات ويهدف إلى تحقيق هدف محدد.
- البيئة (Environment): تشمل البيئة كل ما يتفاعل معه الوكيل. وهي تتغير استجابة لإجراءات الوكيل وتقدم ملاحظات بناءً على النتائج.
- الحالة (State): تمثل الحالة لقطة للوضع الحالي في البيئة. يراقب الوكيل الحالة لفهم محيطه وتحديد الإجراء الذي يجب اتخاذه بعد ذلك.
- الإجراء (Action): الإجراء هو حركة أو قرار يتخذه الوكيل ويؤثر على البيئة. يؤدي كل إجراء إلى حالة جديدة ويمكن أن يؤثر على المكافآت المستقبلية.
- المكافأة (Reward): المكافأة هي ببساطة ملاحظات من البيئة تخبر الوكيل ما إذا كان إجراءه مفيدًا أم لا. تشجع المكافآت الإيجابية الوكيل على تكرار الإجراءات الجيدة، بينما تثبط العقوبات (المكافآت السلبية) الإجراءات السيئة.
- السياسة (Policy): السياسة هي استراتيجية الوكيل لاختيار الإجراءات بناءً على الحالة الحالية. بمرور الوقت، يقوم الوكيل بتحسين سياسته لتعظيم إجمالي المكافآت التي يمكنه كسبها.
من خلال استخدام هذه المكونات معًا، يجعل التعلم التعزيزي من الممكن لأنظمة الذكاء الاصطناعي تعلم سلوكيات فعالة من خلال التجربة والخطأ المستمر. مع كل محاولة، يصبح الوكيل أفضل في اختيار الإجراءات التي تؤدي إلى مكافآت أعلى ونتائج أفضل.
Link to this sectionالتعلم التعزيزي في ابتكارات الرؤية الحاسوبية#
تُستخدم الرؤية الحاسوبية لمهام مثل اكتشاف الكائنات في الصور، وتصنيف محتويات الصورة، وتقسيم الصورة إلى أجزاء مختلفة. تدعم نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 مثل هذه المهام، ويمكن استخدامها لبناء تطبيقات مؤثرة قادرة على جمع رؤى مرئية.
ومع ذلك، عندما يتم دمج مهام الرؤية بالذكاء الاصطناعي هذه مع التعلم التعزيزي، تكون النتيجة حل ذكاء اصطناعي لا يكتفي بالرؤية فحسب؛ بل يتعلم أيضًا كيفية التصرف بناءً على الرؤى المرئية ويتحسن بمرور الوقت.
مثال مثير للاهتمام على التعلم التعزيزي في تطبيقات الرؤية الحاسوبية هو استخدام الروبوتات في المستودعات. يمكن للروبوتات المجهزة بكاميرات وأنظمة رؤية حاسوبية تحليل محيطها، واكتشاف مكان وجود كل عنصر، وتحديد شكله وحجمه، وفهم كيفية وضعه على الرف.
في كل مرة يحاول فيها الروبوت التقاط عنصر، يتلقى ملاحظات - النجاح إذا تم التقاط العنصر بشكل صحيح أو الفشل إذا سقط. بمرور الوقت، يتعلم الروبوت الإجراءات التي تعمل بشكل أفضل مع العناصر المختلفة. وبدلاً من اتباع مجموعة ثابتة من التعليمات، فإنه يتحسن باستمرار من خلال التجربة.

الشكل 3. ذراع روبوتية تستخدم رؤية الذكاء الاصطناعي والتعلم التعزيزي لالتقاط الأشياء.
Link to this sectionتطبيقات التعلم التعزيزي في الرؤية الحاسوبية#
الآن وبعد أن أصبح لدينا فهم أفضل لماهية التعلم التعزيزي ودوره في الرؤية الحاسوبية، دعونا نلقي نظرة فاحصة على بعض الأمثلة حول الأماكن التي يُستخدم فيها التعلم التعزيزي والرؤية الحاسوبية معًا.
Link to this sectionدمج رؤية الذكاء الاصطناعي والتعلم التعزيزي للمركبات الأكثر ذكاءً#
يمكن للمركبات ذاتية القيادة الاعتماد على كل من رؤية الذكاء الاصطناعي لفهم محيطها والتعلم التعزيزي لاتخاذ قرارات بناءً على ما تراه. ومثال رائع على ذلك في الواقع هو AWS DeepRacer.
إن AWS DeepRacer عبارة عن سيارة سباق ذاتية القيادة بالكامل بمقياس 1/18 تتعلم كيفية القيادة باستخدام كاميرا وتعلم تعزيزي. فبدلاً من أن يتم إخبارها بما يجب فعله، تكتشف الأشياء بنفسها من خلال التجربة، وارتكاب الأخطاء، والتعلم منها.
تعمل كاميرا هذه السيارة الصغيرة كزوج من العيون، حيث تلتقط المسار أمامها. وبناءً على ما تراه، تتعلم السيارة كيفية التوجيه والسرعة التي يجب أن تسير بها. مع كل لفة، تصبح أفضل. على سبيل المثال، قد تتعلم اتخاذ منعطفات أوسع أو التباطؤ قبل المنعطفات الحادة من خلال التعلم من المحاولات السابقة.
يبدأ التدريب لـ DeepRacer في بيئة افتراضية، حيث يمارس النموذج مهارات القيادة الخاصة به ويصقلها. بمجرد وصوله إلى مستوى معين من الأداء، يتم نقل هذه المهارات إلى مسارات العالم الحقيقي باستخدام سيارات مادية.

الشكل 4. تستخدم AWS DeepRacer الرؤية والتعلم التعزيزي للقيادة الذاتية. مصدر الصورة: Amazon.
Link to this sectionالانتقال نحو الروبوتات الجراحية المستقلة#
أحد مجالات البحث المثيرة التي تكتسب اهتمامًا هو دمج رؤية الذكاء الاصطناعي والتعلم التعزيزي في الجراحة الروبوتية. في الوقت الحالي، لا يزال هذا التطبيق نظريًا إلى حد كبير. ويقوم الباحثون بإجراء عمليات محاكاة في بيئات افتراضية.
ومع ذلك، تظهر التجارب المبكرة نتائج واعدة، مما يشير إلى أن الروبوتات الجراحية يمكن أن تؤدي في النهاية إجراءات معقدة ودقيقة بدقة أكبر، وقدرة على التكيف، وبحد أدنى من التدخل البشري.
الشكل 5. أصبحت الروبوتات الجراحية أكثر تقدمًا.
على سبيل المثال، تخيل موقفًا يحتاج فيه رفع قطعة من الشاش بعناية من موقع جراحي. سيقوم الروبوت المجهز برؤية الذكاء الاصطناعي أولاً بتحليل المشهد، باستخدام التقسيم لتحديد الشاش والأنسجة المحيطة.
سيساعد التعلم التعزيزي بعد ذلك الروبوت الجراحي على تحديد كيفية التعامل مع المهمة، وتحديد أفضل زاوية للإمساك بالشاش، ومقدار الضغط الذي يجب تطبيقه، وكيفية رفعه دون إزعاج المناطق الحساسة المجاورة. بمرور الوقت ومن خلال الممارسة المتكررة في بيئات محاكاة، يمكن للروبوت أن يتعلم أداء هذه الحركات الدقيقة والحاسمة بمهارة وثقة متزايدتين.
Link to this sectionإيجابيات وسلبيات التعلم التعزيزي في رؤية الذكاء الاصطناعي#
يسمح التعلم التعزيزي لأنظمة رؤية الذكاء الاصطناعي بتجاوز التعرف البسيط والبدء في اتخاذ قرارات بناءً على ما تراه. وهذا يفتح إمكانيات جديدة في مجالات مثل الروبوتات، والأتمتة، والتفاعل في الوقت الفعلي.
إليك بعض المزايا الرئيسية لدمج التعلم التعزيزي في سير عمل رؤية الذكاء الاصطناعي:
- اعتماد أقل على البيانات المصنفة: يمكن لهذه الأنظمة التعلم من التفاعل، لذا فهي لا تحتاج إلى مجموعات بيانات ضخمة مصنفة للبدء.
- التعامل مع عدم اليقين بشكل أفضل: يمكن للتعلم التعزيزي التعامل مع المعلومات المرئية غير الكاملة أو الصاخبة عن طريق تعديل الإجراءات بناءً على الملاحظات بدلاً من الاعتماد فقط على البيانات المثالية.
- يدعم التعلم طويل المدى: يساعد النماذج على التحسن بمرور الوقت من خلال التعلم من تسلسلات الإجراءات، وليس فقط قرارات الخطوة الواحدة.
من ناحية أخرى، إليك بعض قيود التعلم التعزيزي التي يجب مراعاتها:
- مشكلة تحديد الائتمان: قد يكون من الصعب على الوكيل معرفة الإجراءات المحددة التي ساهمت في النتيجة النهائية، خاصة في تسلسلات القرارات الطويلة.
- خطر الاستكشاف غير الآمن: أثناء التدريب، قد يحاول الوكيل إجراءات غير آمنة أو غير مرغوب فيها لن تكون مقبولة في تطبيقات العالم الحقيقي مثل الرعاية الصحية أو القيادة الذاتية.
- بطء التقارب: قد يستغرق النموذج وقتًا طويلاً للوصول فعليًا إلى أداء جيد، خاصة بالنسبة للمهام المعقدة.
Link to this sectionأبرز النقاط#
يمكّن التعلم التعزيزي في مشاريع الرؤية الحاسوبية أنظمة الذكاء الاصطناعي من فهم محيطها والتعلم من خلال التجربة. مع توفير نماذج مثل Ultralytics YOLO11 لاكتشاف الكائنات في الوقت الفعلي، يمكن للنظام اتخاذ قرارات مستنيرة بناءً على ما يراه.
يتجاوز هذا النهج الأساليب التقليدية من خلال السماح للذكاء الاصطناعي بالتحسن من خلال التجربة والملاحظات بدلاً من الاعتماد فقط على البيانات المصنفة. وهو يدعم التعلم المستمر ويساعد في بناء أنظمة رؤية ذكاء اصطناعي أكثر مرونة وتكيفًا وذكاءً تتحسن بمرور الوقت.
انضم إلى مجتمعنا المتنامي. قم بزيارة مستودع GitHub الخاص بنا للتعمق أكثر في الذكاء الاصطناعي. هل تتطلع إلى بدء مشاريع الرؤية الحاسوبية الخاصة بك؟ استكشف خيارات الترخيص الخاصة بنا. اعرف المزيد حول الذكاء الاصطناعي في التصنيع ورؤية الذكاء الاصطناعي في صناعة السيارات على صفحات حلولنا.






