Rilevamento video nel traffico notturno: uno sguardo al perché la precisione è fondamentale
Dalla scarsa visibilità all'abbagliamento, scopri cosa rende la precisione del rilevamento video nel traffico notturno una sfida e come la computer vision migliora la sicurezza e il flusso.

Le strade appaiono diverse al buio, non solo per i conducenti, ma anche per i sistemi responsabili della loro sicurezza. Scarsa visibilità, abbagliamento dei fari e riflessi in rapido movimento possono rendere il rilevamento dei veicoli di notte più complesso.
I metodi tradizionali, come l'osservazione manuale o le telecamere basate sul movimento, si affidano principalmente al giudizio umano e a semplici segnali di movimento. Ciò può risultare inaffidabile in condizioni di scarsa illuminazione o di traffico complesso. Questi metodi potrebbero identificare erroneamente veicoli o pedoni, portando a falsi rilevamenti o osservazioni mancate.

Fig 1. Esempio di una strada scarsamente illuminata di notte (Fonte)
L'intelligenza artificiale (AI), il deep learning e la computer vision possono colmare il divario automatizzando il rilevamento e il riconoscimento dei veicoli. In particolare, la computer vision è un ramo dell'AI che permette alle macchine di vedere e interpretare i dati visivi. Quando si tratta di rilevamento video del traffico notturno, i modelli di vision AI possono andare oltre la semplice luminosità o il movimento, imparando a riconoscere schemi complessi che migliorano l'accuratezza.
Ad esempio, modelli di computer vision come Ultralytics YOLO26 e Ultralytics YOLO11 sono noti per la loro velocità e precisione. Possono gestire dati video e immagini in tempo reale, rilevando e classificando oggetti multipli all'interno di un fotogramma e tracciandoli lungo le sequenze.
Queste funzionalità sono rese possibili attraverso varie attività di visione, come il rilevamento di oggetti e la segmentazione di istanze, anche quando fari, ombre o veicoli sovrapposti rendono il rilevamento difficile. Consentono al modello di identificare, classificare e differenziare gli oggetti.
In questo articolo, esploreremo le sfide del monitoraggio del traffico notturno, vedremo come la computer vision le affronta e dove la vision AI viene applicata nei sistemi di monitoraggio del traffico nel mondo reale. Iniziamo!
Link to this sectionSfide nel rilevamento notturno#
Prima di esplorare come la computer vision risolva le sfide del rilevamento del traffico notturno, analizziamo perché individuare i veicoli dopo il tramonto sia così difficile. Ecco alcuni fattori da considerare:
-
Bassa visibilità: L'illuminazione limitata e le scarse condizioni di luce rendono difficile per le telecamere catturare riprese nitide e dettagliate. Con una qualità dell'immagine ridotta, i veicoli possono confondersi con lo sfondo o essere identificati in modo errato.
-
Condizioni meteorologiche: Pioggia, nebbia, foschia o persino polvere possono degradare ulteriormente la qualità video. Queste condizioni rendono più difficile per i sistemi di rilevamento distinguere i veicoli dall'ambiente circostante.
-
Fari e luci posteriori: Fasci di luce luminosi e riflessi possono sopraffare le telecamere. Possono creare falsi rilevamenti di veicoli, in cui le macchie di luce vengono scambiate per veicoli, confondendo gli algoritmi di rilevamento e riducendo l'accuratezza.
-
Occlusione dei veicoli: In condizioni di traffico intenso, i veicoli possono essere parzialmente o interamente nascosti dietro altri. L'occlusione complica il tracciamento, il conteggio e la classificazione dei veicoli, specialmente quando più utenti della strada si sovrappongono all'interno di un singolo fotogramma.
Link to this sectionLa necessità di dataset di benchmark e metriche notturne#
I modelli di computer vision vengono addestrati utilizzando ampie collezioni di immagini note come dataset. Questi dataset sono accuratamente etichettati con gli oggetti che contengono, come auto, camion, pedoni e biciclette, e fungono da base per l'addestramento. Studiando questi esempi etichettati, il modello impara a riconoscere i pattern, consentendogli di identificare e rilevare oggetti in nuove riprese video.

Fig 2. Utilizzo della computer vision per rilevare veicoli e pedoni nel traffico (Fonte)
Durante l'addestramento, il modello estrae caratteristiche dai dati e le utilizza per migliorare l'accuratezza del rilevamento. Questo processo aiuta a ridurre i mancati rilevamenti e i falsi allarmi quando il modello viene esposto a scene di traffico reali.
Costruire dataset o raccolte di dati per condizioni notturne, tuttavia, è molto più impegnativo. La scarsa qualità video rende l'etichettatura dispendiosa in termini di tempo e soggetta a errori. Inoltre, eventi rari ma importanti, come incidenti o comportamenti di guida insoliti, possono essere difficili da catturare in ambienti notturni. Ciò porta a un numero limitato di esempi di addestramento dai quali i modelli possono apprendere.
Per risolvere questo problema, i ricercatori hanno sviluppato dataset di benchmark specializzati. Un dataset di benchmark è più di una semplice collezione di immagini. Include etichette standardizzate, protocolli di valutazione e metriche di prestazione come precisione, richiamo e mean average precision (mAP). Queste metriche rendono possibile testare e confrontare diversi algoritmi nelle stesse condizioni, garantendo una valutazione equa e coerente.
Ad esempio, il dataset di benchmark ExDark contiene 7.363 immagini in condizioni di scarsa illuminazione suddivise in 12 categorie di oggetti (bici, barca, bottiglia, autobus, auto, gatto, sedia, tazza, cane, moto, persone, tavolo). Ogni immagine è annotata con riquadri di delimitazione (bounding boxes) e il dataset è ampiamente utilizzato nella ricerca per valutare il rilevamento e la classificazione degli oggetti in condizioni di scarsa illuminazione.
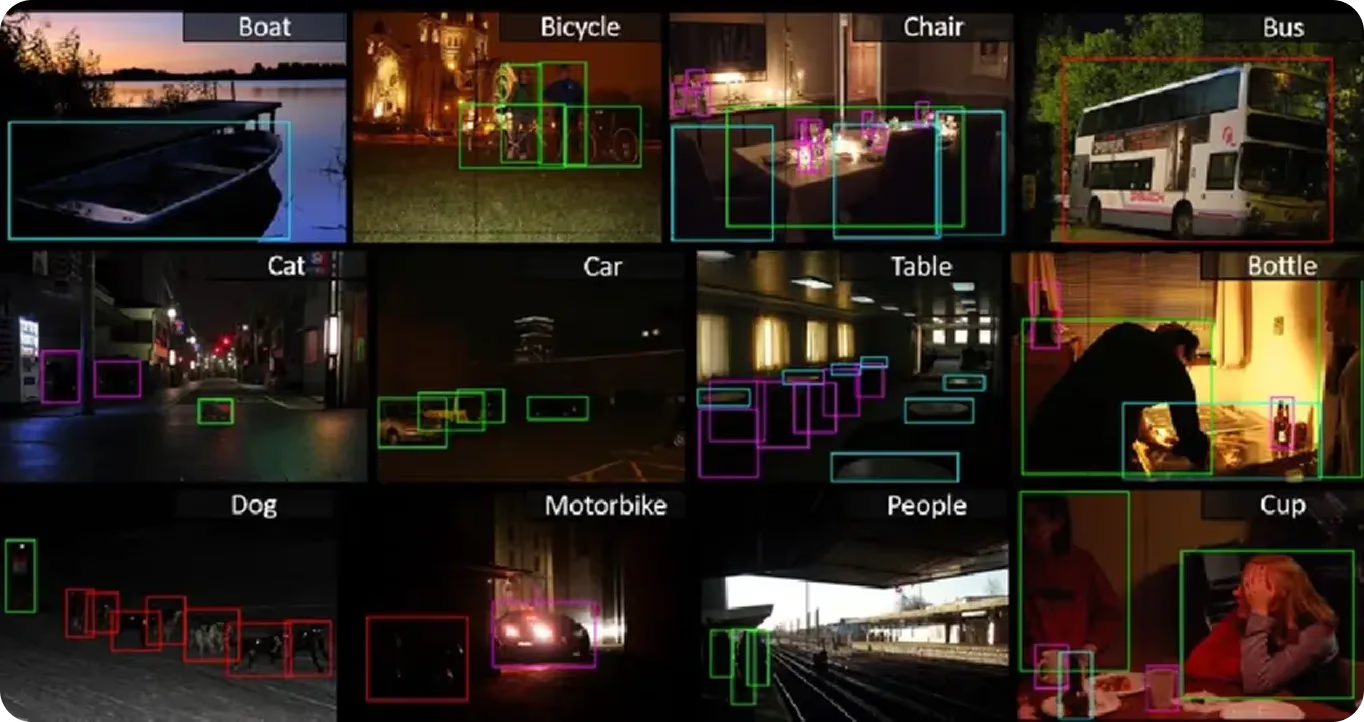
Fig 3. Uno sguardo al dataset ExDark (Fonte)
Analogamente, il dataset di benchmark NightOwls fornisce circa 115.000 immagini notturne con circa 279.000 annotazioni di pedoni. È diventato una risorsa chiave per valutare i sistemi di rilevamento dei pedoni, che svolgono un ruolo vitale nella sicurezza stradale e nei sistemi avanzati di assistenza alla guida (ADAS).
Link to this sectionCome la computer vision aiuta nel rilevamento video del traffico notturno#
Ora che abbiamo una migliore comprensione delle sfide coinvolte e della necessità di dataset, diamo un'occhiata più da vicino a come i sistemi basati sulla visione possano interpretare i video del traffico notturno.
Modelli come YOLO11 e YOLO26 supportano attività di computer vision come il rilevamento di oggetti, il tracciamento e la segmentazione di istanze, che rendono possibile analizzare il traffico anche in condizioni di scarsa illuminazione. Ecco una panoramica delle attività di vision AI supportate da questi modelli per analizzare il traffico notturno:
- Rilevamento di oggetti: Questa attività può essere utilizzata per identificare e localizzare veicoli, pedoni, biciclette e altri utenti della strada in ogni fotogramma, solitamente disegnando riquadri di delimitazione attorno ad essi.
- Tracciamento di oggetti: Aiuta a seguire gli oggetti rilevati attraverso i fotogrammi, consentendo di riconoscere lo stesso veicolo o pedone nel tempo, il che rende possibile stimare la velocità del veicolo e monitorare il flusso del traffico.
- Segmentazione di istanze: Può distinguere singoli oggetti anche quando si sovrappongono, fornendo dettagli a livello di pixel che migliorano l'accuratezza in condizioni notturne complesse.
- Classificazione delle immagini: Questa attività assegna un'intera immagine o un oggetto rilevato a una categoria predefinita, come auto, autobus, camion o motocicletta.
- Rilevamento di riquadri di delimitazione orientati (OBB): Cattura l'angolo esatto e l'orientamento di un oggetto, migliorando l'accuratezza quando i veicoli appaiono in diagonale o in posizioni insolite nel traffico notturno.
Link to this sectionUtilizzo dei modelli Ultralytics YOLO per il monitoraggio notturno#
Abbiamo discusso dell'addestramento dei modelli, della necessità di dataset e delle attività supportate da modelli come YOLO11 e YOLO26. Ma per unire il tutto, c'è un altro concetto da analizzare: come questi modelli vengono effettivamente applicati al monitoraggio notturno.
Pronti all'uso, i modelli Ultralytics YOLO sono disponibili come versioni pre-addestrate, il che significa che sono già stati addestrati su ampi dataset generici, come il dataset COCO, che copre molti oggetti quotidiani. Ciò conferisce al modello una solida capacità di base per rilevare e classificare oggetti.
Tuttavia, poiché questi dataset contengono pochissimi esempi in condizioni di scarsa illuminazione o notturni, i modelli pre-addestrati non sono eccellenti nel gestire abbagliamento, ombre o scarso contrasto in modo efficace. Per renderli efficaci per il rilevamento video del traffico notturno, devono essere messi a punto (fine-tuned) su dataset specializzati che riflettono le condizioni notturne del mondo reale.
Il fine-tuning o addestramento personalizzato prevede l'addestramento del modello su immagini etichettate aggiuntive catturate in condizioni di scarsa illuminazione, come veicoli sotto l'abbagliamento dei fari, pedoni sulle strisce pedonali o incroci affollati di notte, in modo che impari le caratteristiche uniche delle scene notturne.
Una volta addestrato in modo personalizzato, il modello può supportare attività come rilevamento, tracciamento, segmentazione o classificazione con molta maggiore accuratezza in condizioni di scarsa illuminazione. Ciò consente alle autorità del traffico di applicare tali modelli per casi d'uso pratici come il conteggio dei veicoli, la stima della velocità, il controllo adattivo dei segnali e la prevenzione degli incidenti di notte.
Link to this sectionApplicazioni di vision AI per il rilevamento video del traffico notturno#
Successivamente, vediamo come la computer vision possa essere adottata nei sistemi di traffico notturno nel mondo reale.
Link to this sectionI segnali di traffico intelligenti possono supportare la pianificazione di smart city#
Gli incroci urbani sono tra le aree più difficili da gestire, specialmente di notte quando la visibilità cala e il flusso del traffico diventa meno prevedibile. I segnali tradizionali si affidano a timer fissi che non possono rispondere ai cambiamenti in tempo reale. La ricerca mostra che questo non solo fa sprecare tempo ai conducenti, ma porta anche a inutili consumi di carburante e ritardi.
È esattamente qui che i sistemi di computer vision possono aiutare a superare questa sfida. Questi sistemi possono monitorare i movimenti dei veicoli e rilevare il numero di veicoli in tempo reale. I dati vengono quindi inseriti in sistemi di controllo del traffico adattivi. Ciò consente ai segnali di adattarsi rapidamente in risposta alle condizioni stradali reali. Quindi, se una corsia è affollata mentre un'altra è vuota, la temporizzazione del segnale può essere regolata istantaneamente per eliminare i colli di bottiglia.
Link to this sectionPrevenzione degli incidenti#
Guidare di notte è più rischioso rispetto al giorno perché la visibilità ridotta, l'illuminazione irregolare e l'abbagliamento rendono più difficile per i conducenti valutare le distanze. Infatti, gli studi dimostrano che il tasso di incidenti mortali per chilometro di notte può essere fino a tre volte superiore rispetto a quello diurno.
I metodi di monitoraggio convenzionali, come le telecamere di sorveglianza fisse, le pattuglie stradali, i sensori di presenza dei veicoli e i sistemi di segnalazione a tempo fisso, operano in modo reattivo e possono non riuscire a rilevare situazioni pericolose abbastanza presto da impedire che si verifichino.
Le soluzioni di computer vision possono gestire questa preoccupazione analizzando flussi video in diretta e rilevando schemi insoliti sulla strada o sull'autostrada. Utilizzando il tracciamento degli oggetti, questi sistemi possono monitorare il comportamento dei veicoli in tempo reale e inviare avvisi quando qualcosa sembra anomalo.
Ad esempio, se un veicolo in movimento sta cambiando corsia, procedendo troppo velocemente in un'area congestionata o rallentando improvvisamente, il sistema può segnalarlo in tempo reale. Ciò significa che le autorità possono rispondere rapidamente e prevenire gli incidenti prima che accadano.
Link to this sectionGuida autonoma e ADAS#
Per i veicoli autonomi e l'ADAS, la guida notturna porta con sé le sue sfide. La scarsa visibilità e i pattern di traffico imprevedibili rendono più difficile per i sensori tradizionali operare in modo affidabile, il che solleva preoccupazioni per la sicurezza.
La computer vision migliora questi sistemi gestendo attività come il rilevamento di oggetti, il tracciamento della corsia e la segmentazione, consentendo ai veicoli di riconoscere pedoni, altre auto e ostacoli anche in condizioni di scarsa illuminazione. Se combinata con radar o LiDAR (Light Detection and Ranging), che mappano l'ambiente circostante in 3D, lo strato visivo aggiunto aiuta l'ADAS a fornire avvisi precoci e offre ai veicoli autonomi la consapevolezza necessaria per navigare in modo più sicuro di notte.

Fig 4. Riprese di veicoli catturate sia di giorno che di notte (Fonte)
Link to this sectionApplicazione della legge e rilevamento delle violazioni#
L'eccesso di velocità è responsabile di un decesso stradale su tre in tutto il mondo, e il rischio peggiora solo di notte. L'oscurità rende più difficile per la polizia stradale cogliere le violazioni, poiché i dettagli che sono chiari alla luce del giorno spesso si confondono dopo il tramonto.
Ecco perché infrazioni come l'eccesso di velocità su strade vuote, il passaggio con il rosso o l'invasione della corsia sbagliata spesso rimangono impunite. La computer vision affronta questo problema utilizzando telecamere a infrarossi per individuare le violazioni anche in condizioni di scarsa illuminazione. Questi sistemi creano zone di rilevamento in cui vengono registrati gli incidenti, riducendo i falsi positivi e fornendo prove chiare e verificabili. Per le autorità dei trasporti, significa meno punti ciechi e meno dipendenza dai controlli manuali.
Link to this sectionPro e contro del rilevamento video del traffico notturno#
Ecco alcuni vantaggi dell'utilizzo della vision AI per il rilevamento video del traffico notturno.
- Scalabilità: Una volta messi a punto, i modelli possono essere distribuiti su molte telecamere o incroci, supportando il monitoraggio dell'intera città.
- Analisi predittiva: I dati video storici possono essere utilizzati per prevedere la congestione e le zone a rischio incidenti, supportando misure preventive.
- Ottimizzazione delle risorse: Fornisce alle autorità approfondimenti in tempo reale che aiutano a distribuire pattuglie stradali e servizi di emergenza in modo più efficiente.
Nonostante i suoi benefici, il rilevamento del traffico notturno tramite vision AI presenta anche alcune limitazioni. Ecco alcuni fattori da tenere a mente:
-
Dipendenza dai dati: L'accuratezza dei sistemi di vision AI si basa pesantemente sull'accesso ad ampi dataset di alta qualità che catturano una vasta gamma di condizioni notturne.
-
Sfide ambientali: Fattori meteorologici come pioggia, nebbia o foschia, così come problemi pratici come lenti della telecamera sporche o non allineate, possono ridurre le prestazioni di rilevamento e richiedere una manutenzione regolare.
-
Requisiti hardware: L'esecuzione di modelli AI avanzati richiede spesso GPU ad alte prestazioni o dispositivi edge specializzati, il che può rendere la distribuzione su larga scala costosa e complessa.
Link to this sectionIl futuro dei sistemi di trasporto intelligenti di notte#
Mentre le città crescono e le strade diventano più trafficate, il rilevamento del traffico notturno si sta spostando verso sistemi più intelligenti e reattivi. Ad esempio, le telecamere termiche e i sensori a infrarossi possono rilevare le firme di calore di persone e veicoli, rendendo possibile vedere anche nell'oscurità totale. Questo riduce gli errori che si verificano quando le telecamere standard faticano con l'abbagliamento o la scarsa illuminazione.

Fig 5. La tecnologia di visione notturna migliora il rilevamento dei pedoni di notte (Fonte)
Un altro approccio in crescita è la fusione camera-LiDAR. Le telecamere forniscono immagini dettagliate della strada, mentre il LiDAR genera una mappa 3D precisa. Usati insieme, migliorano l'accuratezza del rilevamento di corsie, veicoli e ostacoli, particolarmente in condizioni di scarsa illuminazione o nebbia moderata.
Allo stesso tempo, i progressi nel miglioramento delle immagini in condizioni di scarsa illuminazione, nel riconoscimento dei pedoni e nell'identificazione delle targhe stanno ampliando le capacità della computer vision. Con questi miglioramenti, anche strade e incroci scarsamente illuminati possono essere monitorati con maggiore affidabilità e meno errori.
Link to this sectionPunti chiave#
Rilevare veicoli di notte è sempre stata una sfida per il monitoraggio del traffico, ma la computer vision la sta rendendo più gestibile. Riducendo l'impatto dell'abbagliamento e gestendo scene di traffico complesse, fornisce un quadro più accurato di come le strade si comportano dopo il tramonto. Man mano che questi sistemi continuano ad avanzare, stanno aprendo la strada a trasporti più sicuri, intelligenti ed efficienti di notte.
Pronto a integrare la vision AI nei tuoi progetti? Unisciti alla nostra community attiva e scopri innovazioni come l'AI nell'industria automobilistica e la vision AI nella robotica. Visita il nostro repository GitHub per saperne di più. Per iniziare oggi stesso con la computer vision, dai un'occhiata alle nostre opzioni di licenza.






