2025년 컴퓨터 비전을 위한 카메라 보정 가이드
카메라 보정이 왜곡을 교정하고 깊이 추정을 개선하며 다양한 컴퓨터 비전 애플리케이션의 정확도를 높여 비전 AI를 어떻게 향상시키는지 배워보세요.

카메라는 인간처럼 세상을 보지 않습니다. 종종 이미지를 캡처할 때 발생하는 왜곡과 원근 변화는 비전 AI 모델의 정확도에 영향을 줄 수 있습니다. 카메라 보정을 통해 이러한 왜곡을 수정하고 컴퓨터 비전 모델이 실제 세계의 객체를 있는 그대로 인식하도록 만들 수 있습니다. 이 과정에는 렌즈 왜곡 보정, 초점 거리 조정, 센서 정렬이 포함되어 카메라가 정확한 이미지를 캡처할 수 있도록 돕습니다.
특히 정확한 카메라 보정은 깊이를 추정하고 거리를 올바르게 측정하는 데 핵심적입니다. Ultralytics YOLO11과 같은 비전 AI 모델은 객체 탐지 및 자세 추정과 같은 다양한 컴퓨터 비전 작업을 수행하기 위해 잘 보정된 입력값이 필요합니다. 적절한 입력 이미지가 없으면 모델 성능이 저하되어 실제 응용 분야에서 오류가 발생할 수 있습니다.
전통적인 체커보드 패턴부터 고급 AI 기반 기술에 이르기까지 다양한 카메라 보정 방식은 정밀도를 향상시키는 데 도움이 됩니다. 예를 들어, 3D(3차원) 보정은 모델이 깊이를 이해하도록 돕고, 보정 행렬은 더 나은 정확도를 위해 실제 세계의 좌표를 이미지 공간으로 변환합니다.
이 가이드에서는 핵심 매개변수, 다양한 방식, 실제 AI 응용을 위한 최적화를 포함하여 컴퓨터 비전을 위한 카메라 보정의 기초를 다룹니다.
Link to this section컴퓨터 비전에서 카메라 보정의 중요성#
카메라 보정은 이미지가 실제 세계의 측정값과 정확하게 일치하도록 카메라 설정을 조정하는 데 사용됩니다. 이는 이미지 속 객체가 올바른 위치, 크기, 비율로 나타나도록 보장하며, AI 모델을 오도할 수 있는 왜곡을 방지합니다.
적절한 보정이 없으면 카메라가 렌즈 왜곡을 유발하여 객체가 늘어나 보이거나 정렬이 어긋나 보일 수 있습니다. 이는 객체 탐지, 추적, 깊이 추정의 정확도에 영향을 주어 AI 기반 애플리케이션에서 오류를 초래합니다. 특히 YOLO11과 같은 모델은 입력 데이터가 올바르게 보정되었을 때 더 효과적으로 작동하며, 공간 해석의 오류를 줄이고 실제 의사결정 능력을 향상시킵니다.
정확한 보정은 드론, 자율주행 자동차, 로봇 비전 분야에서 특히 중요합니다. 이러한 시스템에서 정렬이 잘못되면 거리 계산이 부정확해져 내비게이션 및 장애물 탐지와 같은 작업에 영향을 미칠 수 있습니다.
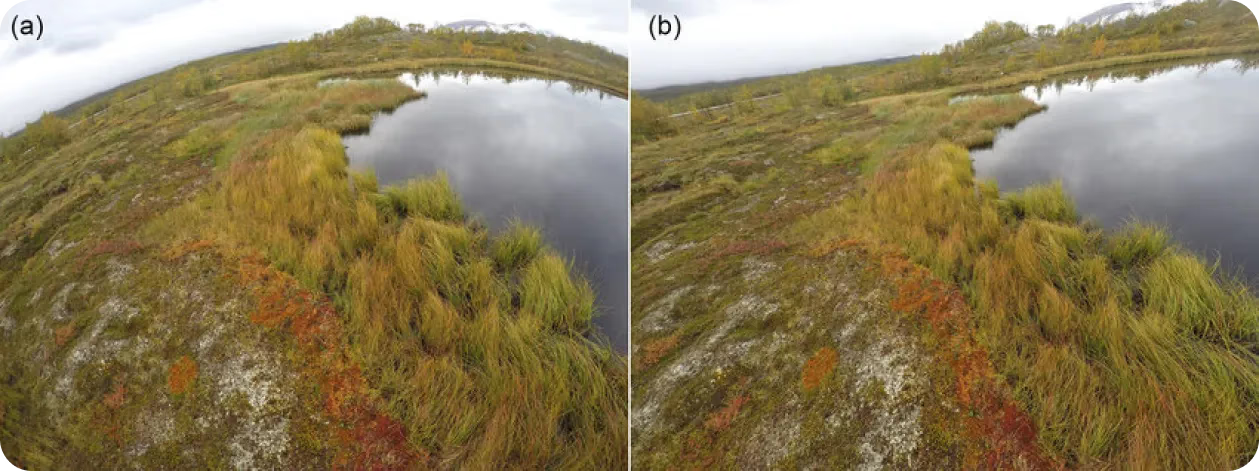
그림 1. 카메라 보정을 사용하여 수정된 렌즈 왜곡(좌측 원본, 우측 수정 후) 예시입니다.
Link to this section렌즈 왜곡 효과 탐구#
렌즈 왜곡은 카메라가 이미지 내의 객체 형태와 위치를 잘못 표현하게 만들 수 있습니다. 다음은 다양한 유형의 렌즈 왜곡 예시입니다:
- 배럴 왜곡(Barrel distortion): 직선이 밖으로 휘어져 보여 이미지 중앙의 객체가 부풀어 보이는 현상입니다. 이는 광각 렌즈에서 흔하며, 깊이 인식을 왜곡하여 자율 시스템의 3D 보정을 방해할 수 있습니다.
- 핀쿠션 왜곡(Pincushion distortion): 직선이 이미지 중심을 향해 안쪽으로 휘어지는 현상으로, 배럴 왜곡과 반대 효과를 나타냅니다.
- 콧수염 왜곡(Mustache distortion): 배럴 왜곡과 핀쿠션 왜곡이 결합하여 직선이 파동 형태로 휘어지는 현상입니다.
- 색수차(Chromatic aberration): 렌즈가 색상을 동일한 지점에 초점 맞추지 못해 객체 주위에 색 번짐이 생기는 현상입니다.
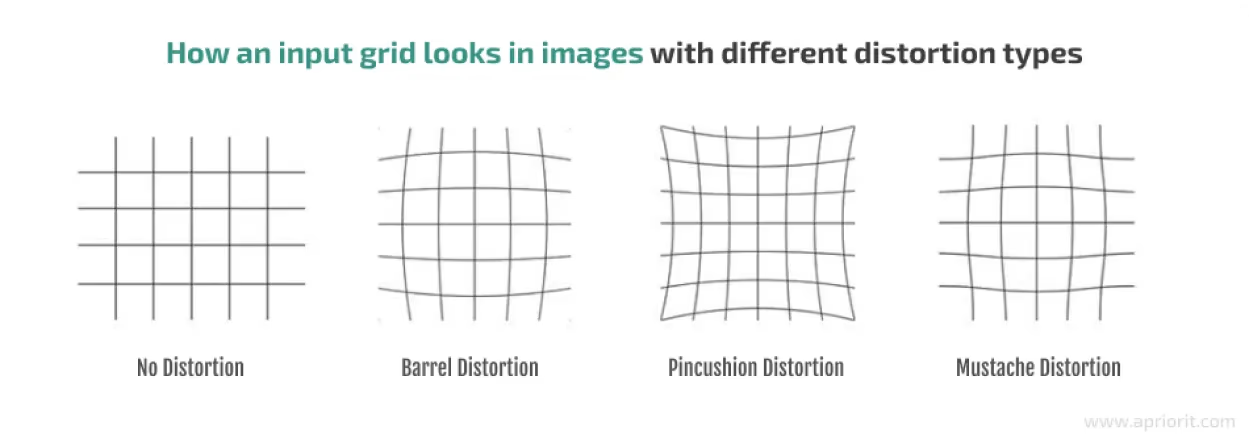
그림 2. 다양한 유형의 렌즈 왜곡입니다.
Link to this section카메라 보정의 유형#
카메라 보정은 두 가지 핵심 요소로 구성됩니다. 카메라 내부 특성을 정의하는 내재 매개변수(intrinsic parameters)와 세계에 대한 위치 및 방향을 결정하는 외재 매개변수(extrinsic parameters)입니다. 두 가지 유형의 요소를 자세히 살펴보겠습니다.
Link to this section내재 매개변수#
정밀한 내재 보정은 실제 응용 분야에서 탐지된 객체가 올바른 위치와 크기로 나타나도록 하여 모델 예측을 향상시킬 수 있습니다. 몇 가지 내재 매개변수를 간단히 살펴보겠습니다:
- 초점 거리(Focal length): 카메라가 3D 객체를 2D 이미지에 투영하는 방식을 제어합니다. 보정이 잘못되면 객체가 늘어나거나 압축되어 보일 수 있으며, 이로 인해 인식되는 크기와 거리가 변경됩니다.
- 주점(Principal point): 카메라 센서의 광학 중심을 나타냅니다. 오프셋이 생기면 이미지 전체가 이동하여 객체 위치가 어긋날 수 있습니다.
- 비대칭 계수(Skew coefficient): 센서의 비직사각형 픽셀 배열을 설명합니다. 비대칭이 존재하면 이미지가 적절히 정렬되지 않고 기울어지거나 왜곡되어 보일 수 있습니다.
- 왜곡 계수(Distortion coefficients): 렌즈로 인해 발생하는 광학 왜곡을 보정하는 매개변수입니다. 보정 없이는 특히 이미지 가장자리 근처에서 직선이 곡선으로 보일 수 있습니다.
Link to this section외재 매개변수#
외재 보정은 카메라가 실제 세계와 관련하여 어떻게 위치하고 방향을 잡고 있는지 결정하며, 이는 3D 보정, 객체 추적, 깊이 인식에 사용되는 다중 카메라 시스템에서 특히 중요합니다. 이는 드론, 자율주행 차량 및 감시 시스템이 공간 관계를 정확하게 해석하도록 돕습니다.
두 가지 주요 외재 매개변수는 다음과 같습니다:
- 이동 행렬(Translation matrix): 3D 공간에서 카메라의 물리적 위치를 정의하며 X, Y, Z 축을 따라 위치를 지정합니다. 보정이 잘못되면 객체가 실제보다 가깝거나 멀게 보여 부정확한 거리 측정으로 이어질 수 있습니다. 자율주행 차량에서는 장애물 탐지 성능 저하를 초래할 수 있고, 로봇 공학에서는 객체 조작 중 위치 오류를 유발할 수 있습니다.
- 회전 행렬(Rotation matrix): 참조 지점을 기준으로 기울어지거나, 회전하거나, 각도가 틀어진 정도를 지정하여 카메라 방향을 결정합니다. 올바르게 보정되지 않으면 여러 카메라의 이미지가 적절히 정렬되지 않아 3D 재구성, 다중 카메라 추적, 공간 매핑에 문제가 생깁니다. 예를 들어 자율주행 자동차에서 잘못된 회전 행렬은 센서 입력을 어긋나게 하여 차선 탐지 정확도를 떨어뜨릴 수 있습니다.
Link to this section카메라 보정 행렬 이해하기#
카메라로 캡처한 모든 이미지는 3D 세계를 2D로 표현한 것입니다. AI 모델이 정확한 예측을 하려면 이러한 차원 간의 변환 방법이 필요합니다. 이때 카메라 보정 행렬이 등장합니다. 이는 실제 세계의 점들을 카메라의 이미지 평면에 매핑하여 객체가 올바른 위치에 나타나도록 합니다.
간단히 말해 카메라 보정 행렬은 카메라의 내재 매개변수를 나타내는 수학적 모델입니다. 보통 비전 시스템에 저장되며 이미지 처리 알고리즘에서 왜곡을 수정하고 3D 점을 2D 좌표로 매핑하는 데 사용됩니다.
다음으로 살펴보겠지만, 이 행렬은 체커보드 패턴 탐지, 3D 객체 기반 보정, AI 기반 자가 보정과 같은 보정 방식을 사용하여 계산됩니다. 이러한 방식들은 알려진 참조 지점 이미지를 분석하여 주요 매개변수를 추정합니다.
Link to this section다양한 카메라 보정 방식#
특정 사용 사례에 적합한 다양한 카메라 보정 방식이 존재합니다. 전통적인 방식은 물리적 패턴에 의존하며, AI 기반 기술은 딥러닝을 사용하여 프로세스를 자동화합니다.
이러한 방식들을 차례로 살펴보고, 서로 다른 애플리케이션에서 어떻게 정확도를 향상시키는지 알아보겠습니다.
Link to this section전통적인 카메라 보정 방식#
가장 일반적인 카메라 보정 방식 중 하나는 카메라 앞에 체커보드나 그리드 패턴을 배치하는 것입니다. 시스템은 패턴 내의 주요 지점을 탐지하여 보정 매개변수를 계산합니다.
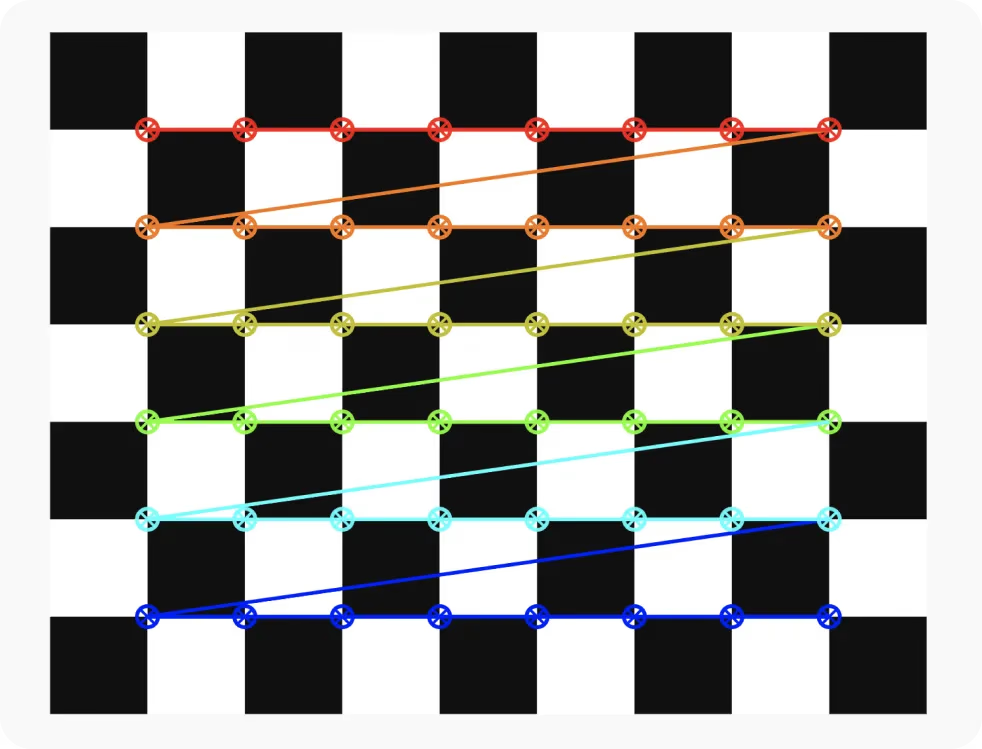
그림 3. 카메라 보정 체커보드입니다.
통제된 환경에서는 유용하지만, 수동 조정과 다양한 각도에서 촬영한 다수의 이미지를 분석해야 합니다. 조명 조건의 변화나 예기치 않은 카메라 움직임은 정확도를 낮출 수 있어 재보정이 필요합니다.
드론이나 자율주행 자동차와 같은 역동적인 환경에서는 전통적인 보정 방식이 따라가기 힘듭니다. 움직이는 카메라는 정밀도를 유지하기 위해 빈번한 재보정이 필요하며, 정적 패턴으로는 이를 수행하기 어렵습니다. 이러한 한계로 인해 더 큰 유연성과 자동화를 제공하는 AI 기반 카메라 보정 방식의 발전이 이루어졌습니다.
Link to this sectionAI 기반 카메라 보정 방식#
AI 기반 기술은 딥러닝 모델을 사용하여 스스로 보정함으로써 수동 조정의 필요성을 줄이고 카메라 보정을 자동화합니다. 이러한 방식은 미리 정의된 패턴 없이 실제 세계 이미지에서 직접 내재 및 외재 매개변수를 추정합니다.
유사하게 합성 데이터셋은 AI 모델에 다양하고 라벨링된 훈련 데이터를 제공하여 매개변수를 개선하고 왜곡을 수정함으로써 카메라 보정을 혁신하고 있습니다. 이러한 데이터셋은 실제 조건을 시뮬레이션하여 AI 모델이 인간의 개입 없이 내재 및 외재 매개변수를 동적으로 조정하도록 학습시킵니다.
예를 들어, 자가 보정 프레임워크는 확률적 모델과 딥러닝을 사용하여 단일 이미지를 분석하고 3D 구조를 추정하며 지속적으로 보정을 개선합니다. 합성 데이터는 모델이 다양한 관점, 센서 정렬 불량, 조명 조건을 처리하도록 훈련함으로써 이 과정을 향상시키며, 자율주행 및 로봇 공학 분야에서 깊이 추정, 장애물 추적, 공간 정확도를 개선합니다.

그림 4. 교통 상황을 이해할 수 있는 자가 보정 비전 AI 시스템입니다.
Link to this section카메라 보정의 주요 활용 분야#
이제 카메라 보정이 무엇인지 이해했으니, 다양한 산업 전반에 걸친 영향력을 살펴보겠습니다.
Link to this section자율주행 차량 및 드론 내비게이션#
자율주행 자동차와 자율 드론의 경우 안전하고 신뢰할 수 있는 내비게이션을 위해 정확한 카메라 보정이 중요합니다. 이러한 시스템은 장애물을 탐지하고 차선 표시를 추적하며 주변 객체를 평가하기 위해 깊이 추정 및 거리 계산에 의존합니다. 보정이 부실하면 거리를 잘못 해석하여 실시간 상황에서 잘못된 결정을 내릴 수 있습니다.
적절히 보정된 행렬은 자율주행 차량이 LiDAR, 레이더, 카메라의 입력을 통합하여 다중 센서 융합을 향상시킬 수 있게 합니다. 이는 차량이 보행자, 차선 경계, 주변 차량까지의 거리를 정확하게 측정하여 사고 위험을 줄이는 데 도움이 됩니다. 한편 드론에서는 3D 보정이 고도 안정성을 유지하고 객체를 정확하게 추적하여 역동적인 환경에서 정밀한 내비게이션을 수행하도록 돕습니다.

그림 5. 자율주행 자동차의 보정된 카메라입니다.
Link to this section증강 현실(AR) 및 가상 현실(VR)#
AR 및 VR 애플리케이션은 디지털 콘텐츠를 실제 세계의 객체와 정렬하기 위해 정확한 카메라 보정에 의존합니다. 적절히 보정되지 않으면 AR 오버레이가 드리프트하거나 정렬이 어긋나 보이거나 스케일이 부정확하게 나타나 사용자 경험을 저해할 수 있습니다.
렌즈 왜곡 보정은 가상 객체가 실제 환경과 매끄럽게 어우러지게 만드는 핵심 요소입니다. 보정이 없으면 왜곡으로 인해 몰입감이 깨질 수 있으며, 게임, 훈련 시뮬레이션 및 의료 영상 분야에서 정확도가 떨어질 수 있습니다. 또한 VR에서는 보정을 통해 머리와 손의 움직임을 정확하게 추적함으로써 반응성을 높이고 더 매끄럽고 몰입감 있는 경험을 만들어냅니다.

그림 6. 공간 측정값을 정교화하기 위해 사용되는 3D 카메라 보정 설정입니다.
Link to this section로봇 비전 및 산업 자동화#
로봇이 세계를 정확하게 보고 상호작용하려면 적절한 카메라 보정이 필수적입니다. 산업 자동화에서 로봇은 정밀하게 객체를 집고, 옮기고, 조작하기 위해 깊이 추정에 의존합니다. 적절한 보정이 없으면 정렬 불량으로 인해 포장, 조립, 품질 관리 검사에서 오류가 발생할 수 있습니다.
로봇 공학의 주요 과제 중 하나는 평면 객체를 정확하게 측정하는 것입니다. 보정은 로봇 팔이 정확한 치수를 감지하도록 도와 생산 속도를 늦추거나 차질을 줄 수 있는 계산 오류를 방지합니다. 3D 보정은 로봇이 객체나 위치 변경에 적응하도록 하여 이 기능을 한 단계 더 발전시킵니다.
Link to this section핵심 요약#
카메라 보정은 많은 컴퓨터 비전 솔루션의 핵심 구성 요소입니다. 이는 AI 모델이 객체 탐지, 추적, 깊이 추정과 같은 작업을 위해 이미지를 정확하게 해석하도록 보장합니다. 내재 및 외재 매개변수는 이미지를 실제 측정값과 정렬하여 AI 기반 애플리케이션에 영향을 줄 수 있는 왜곡을 방지하도록 돕습니다.
렌즈 왜곡 보정은 증강 현실 애플리케이션, 산업 자동화, 다중 카메라 시스템에 매우 중요합니다. AI가 발전함에 따라 자동화된 카메라 보정 방식은 실제 애플리케이션에서 효율성, 정확도 및 장기적인 신뢰성을 향상시키고 있습니다.






