Os benefícios do Ultralytics YOLO11 ser um detector anchor-free
Compreende como o Ultralytics YOLO11 suporta detecção de objetos anchor-free e os benefícios que essa arquitetura de modelo traz para várias aplicações.

Se dermos uma olhada na história dos modelos de IA de visão, o conceito de detecção de objetos — uma tarefa fundamental de visão computacional que envolve identificar e localizar objetos dentro de uma imagem ou vídeo — existe desde a década de 1960. No entanto, o principal motivo de sua importância nas inovações de ponta hoje é que as técnicas de detecção de objetos e as arquiteturas de modelos avançaram e melhoraram rapidamente desde então.
Em um artigo anterior, discutimos a evolução da detecção de objetos e o caminho que levou aos modelos YOLO da Ultralytics. Hoje, vamos nos concentrar em explorar um marco mais específico nesta jornada: o salto dos detectores baseados em âncoras para os detectores anchor-free.
Os detectores baseados em âncoras dependem de caixas predefinidas, chamadas de "âncoras", para prever onde os objetos estão em uma imagem. Em contraste, os detectores anchor-free ignoram essas caixas predefinidas e, em vez disso, preveem a localização dos objetos diretamente.
Embora essa mudança possa parecer uma alteração simples e lógica, ela realmente levou a grandes melhorias na precisão e eficiência da detecção de objetos. Neste artigo, entenderemos como os detectores anchor-free remodelaram a visão computacional por meio de avanços como o Ultralytics YOLO11.
Link to this sectionO que são detectores baseados em âncoras?#
Os detectores baseados em âncoras usam caixas predefinidas, conhecidas como âncoras, para ajudar a localizar objetos em uma imagem. Pense nessas âncoras como uma grade de caixas de diferentes tamanhos e formas colocadas sobre a imagem. O modelo então ajusta essas caixas para se adaptarem aos objetos que detecta. Por exemplo, se o modelo identificar um carro, ele modificará a caixa de âncora para corresponder à posição e ao tamanho do carro com mais precisão.
Cada âncora é associada a um possível objeto na imagem e, durante o treinamento, o modelo aprende como ajustar as caixas de âncora para corresponder melhor à localização, tamanho e proporção do objeto. Isso permite que o modelo detecte objetos em diferentes escalas e orientações. No entanto, selecionar o conjunto certo de caixas de âncora pode ser demorado, e o processo de ajustá-las pode ser propenso a erros.
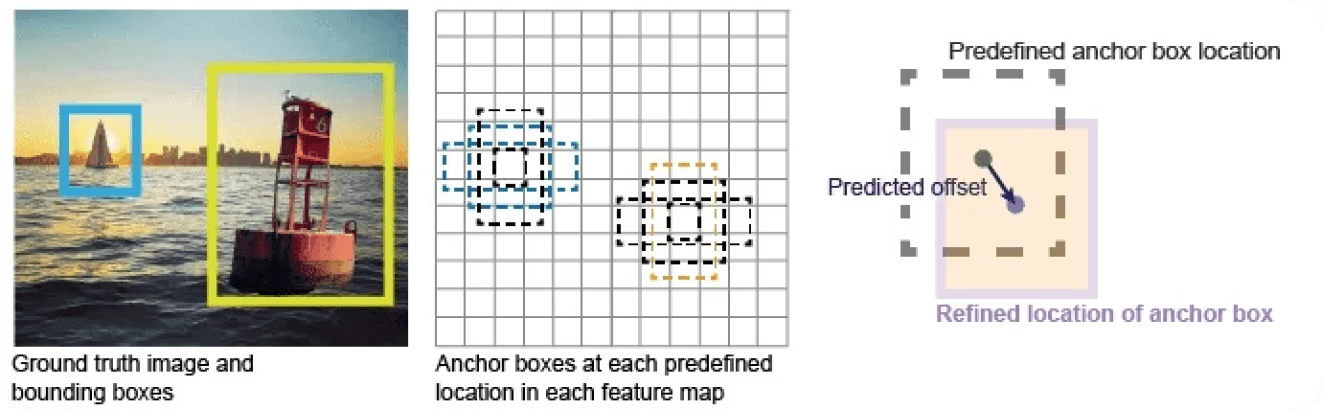
Fig 1. O que é uma Caixa de Âncora?
Embora os detectores baseados em âncoras, como o YOLOv4, tenham funcionado bem em muitas aplicações, eles possuem algumas desvantagens. Por exemplo, as caixas de âncora nem sempre se alinham bem com objetos de diferentes formas ou tamanhos, tornando mais difícil para o modelo detectar objetos pequenos ou com formas irregulares. O processo de selecionar e ajustar os tamanhos das caixas de âncora também pode ser demorado e exige muito esforço manual. Além disso, os modelos baseados em âncoras frequentemente têm dificuldades em detectar objetos que estão ocluídos ou sobrepostos, já que as caixas predefinidas podem não se adaptar bem a esses cenários mais complexos.
Link to this sectionA mudança para a detecção de objetos anchor-free#
Os detectores anchor-free começaram a ganhar atenção em 2018 com modelos como CornerNet e CenterNet, que adotaram uma abordagem nova para a detecção de objetos ao eliminar a necessidade de caixas de âncora predefinidas. Ao contrário dos modelos tradicionais que dependem de caixas de âncora de diferentes tamanhos e formas para prever onde os objetos estão, os modelos anchor-free preveem as localizações dos objetos diretamente. Eles se concentram em pontos-chave ou características do objeto, como o centro, o que simplifica o processo de detecção e o torna mais rápido e preciso.
Veja como os modelos anchor-free geralmente funcionam:
- Detecção de pontos-chave: Em vez de usar caixas predefinidas, alguns modelos identificam pontos importantes em um objeto, como o centro ou cantos específicos. Esses pontos-chave ajudam os modelos a descobrir onde o objeto está e qual o seu tamanho.
- Previsão de Centro predição: Alguns modelos se concentram em prever o centro de um objeto. Uma vez localizado o centro, o modelo pode prever o tamanho e a posição de todo o objeto a partir daí.
- Regressão de mapa de calor: Muitos modelos anchor-free usam mapas de calor, onde cada pixel representa uma possível localização de um objeto. Valores de mapa de calor mais fortes indicam maior confiança de que um objeto está presente naquele ponto.
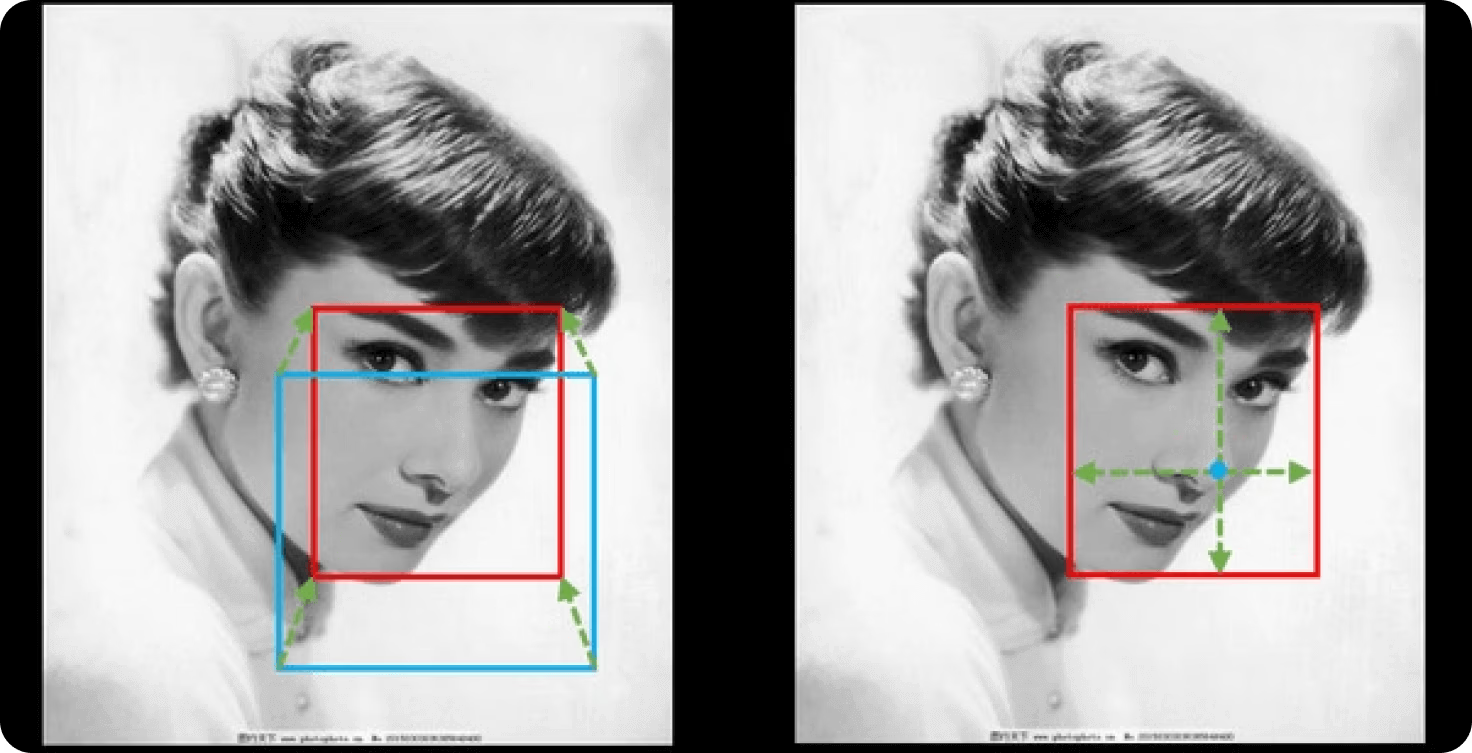
Fig 2. Detecção Baseada em Âncora vs. Detecção Anchor-Free.
Como os modelos anchor-free não dependem de caixas de âncora, eles possuem um design mais simples. Isso significa que são mais computacionalmente eficientes. Como não precisam processar múltiplas caixas de âncora, podem detectar objetos mais rapidamente — uma vantagem importante em aplicações de tempo real como direção autônoma e vigilância por vídeo.
Modelos anchor-free também são muito melhores em lidar com objetos pequenos, irregulares ou obstruídos. Como se concentram em detectar pontos-chave em vez de tentar ajustar anchor boxes, eles são muito mais flexíveis. Isso permite que detectem objetos com precisão em ambientes desordenados ou complexos onde modelos baseados em âncoras podem falhar.
Link to this sectionUltralytics YOLO11: Um detector anchor-free#
Originalmente projetados para velocidade e eficiência, os modelos YOLO mudaram gradualmente de métodos baseados em âncoras para a detecção anchor-free, tornando modelos como o YOLO11 mais rápidos, flexíveis e mais adequados para uma ampla gama de aplicações em tempo real.
Aqui está uma visão rápida de como o design anchor-free evoluiu nas diferentes versões do YOLO:
- Ultralytics YOLOv5u: Introduziu o Anchor-Free Split Ultralytics Head, eliminando a necessidade de caixas de âncora predefinidas. Em vez disso, o modelo prevê diretamente onde os objetos estão em uma imagem, simplificando o processo e melhorando a flexibilidade e a velocidade.
- YOLOv6: Foi usado um novo método chamado Anchor-Aided Training (AAT), onde as âncoras eram usadas apenas durante o treinamento. Isso permitiu que o modelo se beneficiasse da estrutura dos métodos baseados em âncoras durante o treinamento, enquanto ainda usava a detecção anchor-free em tempo de execução para melhor velocidade e adaptabilidade.
- Ultralytics YOLOv8: Mudou totalmente para a detecção anchor-free usando o Anchor-Free Split Ultralytics Head. Isso tornou o modelo mais rápido e preciso, especialmente para objetos pequenos ou com formas estranhas que não se encaixam bem nas caixas de âncora.
- Ultralytics YOLO11: Baseia-se na abordagem anchor-free do YOLOv8, otimizando ainda mais a detecção ao eliminar totalmente as caixas de âncora. Isso resulta em uma detecção mais rápida e precisa para aplicações em tempo real, como monitoramento de comportamento animal e análise de varejo.
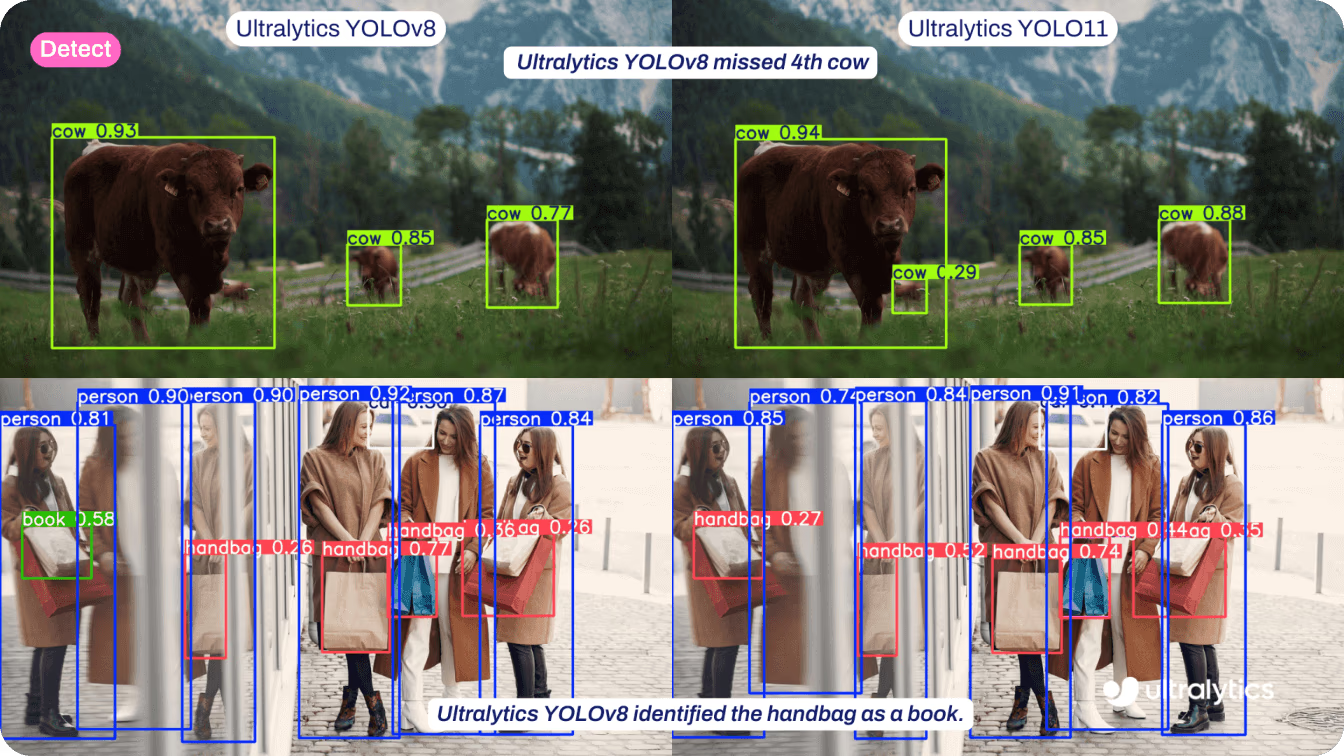
Fig 3. Comparando Ultralytics YOLOv8 e Ultralytics YOLO11.
Link to this sectionAplicações do mundo real do YOLO11#
Um ótimo exemplo dos benefícios da detecção anchor-free usando o YOLO11 é em veículos autônomos. Em carros autônomos, detectar pedestres, outros veículos e obstáculos de forma rápida e precisa é crucial para a segurança. A abordagem anchor-free do YOLO11 simplifica o processo de detecção ao prever diretamente os pontos-chave dos objetos, como o centro de um pedestre ou os limites de outro veículo, em vez de depender de caixas de âncora predefinidas.

Fig 4. Benefícios da Detecção Anchor-Free no YOLO11 (Imagem do Autor).
O YOLO11 não precisa ajustar ou encaixar uma grade de âncoras em cada objeto, o que pode ser computacionalmente caro e lento. Em vez disso, concentra-se em características-chave, tornando-o mais rápido e eficiente. Por exemplo, quando um pedestre entra no caminho do veículo, o YOLO11 pode identificar rapidamente sua localização localizando pontos-chave, mesmo que a pessoa esteja parcialmente escondida ou se movendo. A capacidade de se adaptar a formas e tamanhos variáveis sem caixas de âncora permite que o YOLO11 detecte objetos de forma mais confiável e em velocidades maiores, o que é vital para a tomada de decisões em tempo real em sistemas de direção autônoma.
Outras aplicações onde as habilidades anchor-free do YOLO11 realmente se destacam incluem:
- Varejo e gerenciamento de estoque: O YOLO11 torna mais fácil monitorar produtos nas prateleiras, mesmo quando estão empilhados ou parcialmente bloqueados. Isso ajuda no rastreamento de estoque mais rápido e preciso e reduz erros.
- Imagens médicas: O YOLO11 também é eficaz na saúde, onde pode detectar tumores ou outras anormalidades em exames médicos. Sua capacidade de trabalhar com objetos de formas irregulares ajuda a melhorar a precisão no diagnóstico de condições complexas.
- Monitoramento da vida selvagem: Na pesquisa da vida selvagem, o YOLO11 pode rastrear animais em florestas densas ou terrenos difíceis, ajudando pesquisadores a monitorar comportamentos ou proteger espécies ameaçadas.
- Análise esportiva: O YOLO11 pode ser usado para rastrear jogadores, movimentos de bola ou outros elementos em tempo real durante eventos esportivos para fornecer insights valiosos para equipes, treinadores e emissoras.
Link to this sectionConsiderações ao trabalhar com modelos anchor-free#
Embora modelos anchor-free como o YOLO11 ofereçam muitas vantagens, eles possuem certas limitações. Uma das principais considerações práticas é que até modelos anchor-free podem ter dificuldades com oclusões ou objetos altamente sobrepostos. A lógica por trás disso é que a visão computacional visa replicar a visão humana, e, assim como às vezes temos dificuldade em identificar objetos ocluídos, os modelos de IA podem enfrentar desafios semelhantes.
Outro fator interessante está relacionado ao processamento das previsões do modelo. Embora a arquitetura de modelos anchor-free seja mais simples que a baseada em âncoras, o refinamento adicional torna-se necessário em certos casos. Por exemplo, técnicas de pós-processamento como non-maximum suppression (NMS) podem ser necessárias para limpar previsões sobrepostas ou melhorar a precisão em cenas lotadas.
Link to this sectionAncorando o futuro da IA com o YOLO11#
A mudança da detecção baseada em âncoras para a anchor-free tem sido um avanço significativo na detecção de objetos. Com modelos anchor-free como o YOLO11, o processo é simplificado, levando a melhorias tanto na precisão quanto na velocidade.
Por meio do YOLO11, vimos como a detecção de objetos anchor-free se destaca em aplicações em tempo real, como carros autônomos, vigilância por vídeo e imagens médicas, onde uma detecção rápida e precisa é crucial. Essa abordagem permite que o YOLO11 se adapte mais facilmente a tamanhos de objetos variáveis e cenas complexas, oferecendo melhor desempenho em diversos ambientes.
À medida que a visão computacional continua a evoluir, a detecção de objetos se tornará apenas mais rápida, mais flexível e mais eficiente.
Explore nosso repositório no GitHub e junte-se à nossa comunidade envolvente para se manter atualizado sobre tudo relacionado à IA. Confira como a IA de visão está impactando setores como manufatura e agricultura.






