Khám phá thị giác máy tính trong các ứng dụng điều hướng
Xem cách thị giác máy tính trong các giải pháp điều hướng nâng cao khả năng lập bản đồ thời gian thực, nhận dạng đối tượng và thực tế tăng cường để có trải nghiệm di chuyển thông minh hơn và an toàn hơn.

Ngày nay, việc lấy điện thoại ra, nhập điểm đến và làm theo hướng dẫn từng bước để đến nơi trở nên vô cùng dễ dàng. Đó là việc chỉ mất vài giây. Nhưng sự tiện lợi hằng ngày này là kết quả của nhiều năm tiến bộ công nghệ. Điều hướng đã tiến một chặng đường dài, từ bản đồ giấy và la bàn đến các hệ thống thông minh có thể hiểu và phản ứng với thế giới trong thời gian thực.
Một trong những công nghệ đứng sau bước chuyển mình này là thị giác máy tính, một nhánh của trí tuệ nhân tạo (AI) cho phép máy móc diễn giải thông tin thị giác giống như cách con người thực hiện. Các công cụ điều hướng tiên tiến hiện nay sử dụng hình ảnh thời gian thực từ vệ tinh, camera hành trình và cảm biến cấp đường phố để cải thiện độ chính xác của bản đồ, theo dõi điều kiện đường xá và hướng dẫn người dùng thông qua các môi trường phức tạp.
Trong bài viết này, chúng ta sẽ khám phá cách thị giác máy tính đang nâng cao khả năng điều hướng bằng cách cải thiện bản đồ GPS, cung cấp cập nhật giao thông theo thời gian thực và hỗ trợ các công nghệ như điều hướng thực tế tăng cường (AR) và xe tự lái.
Link to this sectionCác hệ thống điều hướng AI với bản đồ 3D sống động#
Việc sử dụng các công cụ như Google Maps để điều hướng cuộc sống hằng ngày đã trở nên rất phổ biến, cho dù bạn đang đi ngang qua thị trấn hay tìm kiếm một quán cà phê gần đó. Khi các công nghệ AI được áp dụng rộng rãi hơn, chúng ta đang thấy các tính năng ngày càng nâng cao như Immersive View, được Google Maps giới thiệu vào năm 2023, cho phép người dùng xem trước các phần trong hành trình của họ trong môi trường 3D. Điều này có thể thực hiện được nhờ sự kết hợp giữa AI, kỹ thuật quang trắc (photogrammetry) và thị giác máy tính.
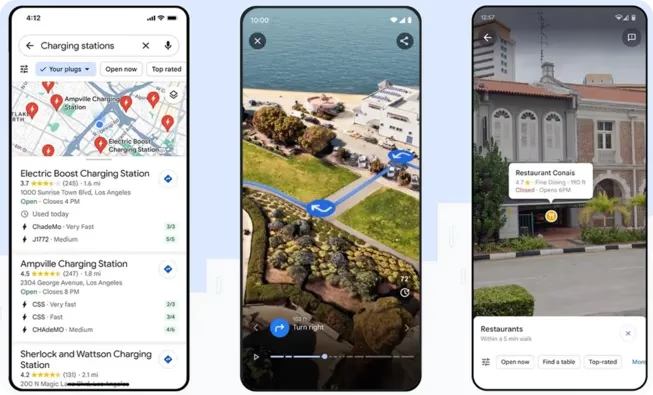
Hình 1. Immersive View của Google Maps.
Tất cả bắt đầu với hàng tỷ hình ảnh độ phân giải cao được chụp bởi một loạt thiết bị chuyên dụng. Điều này bao gồm xe Street View, các phương tiện được trang bị camera 360 độ chạy quanh các thành phố và thiết bị Trekker, những chiếc ba lô đeo có gắn camera được sử dụng để chụp hình ảnh ở những nơi phương tiện không thể tiếp cận, như đường mòn đi bộ hoặc các con hẻm nhỏ.
Những hình ảnh này được căn chỉnh với dữ liệu bản đồ bằng cách sử dụng kỹ thuật quang trắc, một kỹ thuật ghép các ảnh 2D được chụp từ các góc độ khác nhau lại với nhau để tạo ra các mô hình 3D chính xác về đường phố, tòa nhà và địa hình.
Thị giác máy tính sau đó được sử dụng để phân tích các mô hình này bằng cách sử dụng nhận diện đối tượng (object detection) và phân đoạn ảnh để xác định và dán nhãn các đặc điểm quan trọng như biển báo giao thông, vỉa hè, lối sang đường và lối vào tòa nhà.

Hình 2. Immersive View sử dụng phân đoạn để tách các đối tượng trên đường phố.
Dữ liệu đã dán nhãn được sử dụng để huấn luyện các hệ thống AI nhận biết cách các tín hiệu thị giác khác nhau giữa các khu vực. Ví dụ, hệ thống có thể dễ dàng phân biệt giữa biển báo "SLOW" (CHẬM) ở Hoa Kỳ, thường là hình thoi màu vàng hoặc cam, và một biển báo tương tự ở Nhật Bản, thường là hình tam giác màu đỏ và trắng. Mức độ hiểu biết này làm cho trải nghiệm điều hướng trở nên chính xác hơn và nhận thức văn hóa tốt hơn.
Cuối cùng, Immersive View phủ các lộ trình điều hướng trực tiếp lên môi trường 3D, mang lại trải nghiệm mượt mà, trực quan hiển thị chính xác vị trí bạn đang hướng tới.
Link to this sectionThực tế tăng cường trong các giải pháp điều hướng#
Có lẽ tất cả chúng ta đều từng trải qua việc xoay vòng tròn và cố gắng tìm xem Google Maps đang chỉ chúng ta đi hướng nào. Sự bối rối đó chính là điều mà điều hướng thực tế tăng cường (AR), một công nghệ phủ thông tin kỹ thuật số lên chế độ xem camera ngoài đời thực, nhắm đến việc giải quyết. Nó đang thay đổi cách mọi người tìm đường ở những nơi đông đúc như đường phố hoặc các khu vực trong nhà rộng lớn.
Bản đồ thông thường có thể khó theo dõi, đặc biệt là khi tín hiệu GPS yếu hoặc không hoạt động tốt. Điều hướng AR giải quyết vấn đề này bằng cách hiển thị các chỉ dẫn kỹ thuật số, mũi tên và nhãn ngay trên chế độ xem camera trực tiếp của thế giới thực. Điều này có nghĩa là người dùng thấy các hướng dẫn khớp với đường phố và các tòa nhà xung quanh họ, giúp việc biết phải đi đâu trở nên dễ dàng hơn nhiều.
Link to this sectionCách thực tế tăng cường được sử dụng trong điều hướng#
Điều hướng AR dựa vào các mô hình thị giác máy tính để hiểu môi trường thông qua camera của thiết bị. Điều này liên quan đến nhiều tác vụ khác nhau như định vị hình ảnh, phát hiện các đặc điểm như cạnh tòa nhà hoặc biển báo đường phố và khớp chúng với bản đồ đã lưu trữ. Công nghệ định vị và lập bản đồ đồng thời (SLAM) tạo ra một bản đồ môi trường trong khi theo dõi vị trí của thiết bị trong thời gian thực.
Ví dụ, Sân bay Zurich là nơi đầu tiên triển khai Live View của Google Maps để điều hướng trong nhà. Hành khách có thể sử dụng camera điện thoại của họ để xem các mũi tên và chỉ dẫn được phủ lên trong môi trường thực tế, hướng dẫn họ qua các nhà ga đến cổng, cửa hàng và các dịch vụ. Điều này cải thiện trải nghiệm hành khách bằng cách giúp việc điều hướng trong các không gian trong nhà phức tạp trở nên dễ dàng hơn.

Hình 3. Sân bay Zurich đang sử dụng thị giác máy tính và AR để hướng dẫn hành khách trong nhà.
Link to this sectionTăng cường an toàn giao thông đường bộ với các hệ thống điều hướng AI#
Đường phố thành phố ngày càng trở nên đông đúc hơn mỗi ngày. Với lượng xe cộ trên đường nhiều hơn, vỉa hè chật cứng và hoạt động liên tục, việc giữ cho giao thông lưu thông trôi chảy và an toàn là một thách thức ngày càng lớn. Để giúp quản lý sự hỗn loạn này, nhiều thành phố đang chuyển sang sử dụng AI và thị giác máy tính.
Camera thông minh và các cảm biến được lắp đặt tại các nút giao thông và dọc theo đường xá thu thập một luồng dữ liệu hình ảnh ổn định. Các đoạn phim đó được xử lý trong thời gian thực để phát hiện tai nạn, theo dõi lưu lượng giao thông, phát hiện ổ gà và phát hiện các vấn đề như đỗ xe trái phép hoặc hành vi nguy hiểm của người đi bộ.
Một ví dụ thú vị về điều này là Đường cao tốc Sân bay Thông minh ở Hàng Châu, Trung Quốc. Đường cao tốc dài 20 km này, kết nối trung tâm thành phố Hàng Châu với Sân bay Quốc tế Tiêu Sơn, đã được nâng cấp với các camera độ phân giải cao và radar sóng milimet. Các thiết bị này liên tục thu thập dữ liệu video và cảm biến, sau đó được phân tích bằng thị giác máy tính.
Thay vì chỉ ghi lại các đoạn phim, hệ thống diễn giải những gì đang xảy ra trên đường. Các thuật toán thị giác máy tính phát hiện va chạm xe cộ, nhận diện các vi phạm giao thông và thậm chí xác định người đi bộ hoặc chuyển động bất thường gần lối ra đường cao tốc. Điều này cho phép các quan chức giao thông phản ứng với các sự cố chỉ trong vài giây mà không cần phải có mặt trực tiếp tại hiện trường.
Dữ liệu cũng được đưa vào một bản sao kỹ thuật số (digital twin): một mô hình ảo 3D trực tiếp của đường cao tốc hiển thị các điều kiện giao thông thời gian thực, chi tiết phương tiện và tình trạng tắc nghẽn mới phát sinh. Các cảnh sát giao thông theo dõi giao diện trực quan này để quản lý luồng giao thông, phát đi các cảnh báo thông minh và phản ứng với các sự cố một cách nhanh chóng và chính xác.
Link to this sectionKhả năng di chuyển tự động được kích hoạt bởi thị giác máy tính trong điều hướng#
Điều hướng ngày nay vượt xa việc chỉ đi từ điểm A đến điểm B. Nó hiện là một phần quan trọng của các hệ thống thông minh vận chuyển con người, quản lý hàng hóa và đưa ra quyết định thời gian thực - cho dù trên đường hay bên trong các kho hàng.
Trọng tâm của nhiều hệ thống này là thị giác máy tính, cho phép máy móc diễn giải dữ liệu hình ảnh và phản ứng ngay lập tức với môi trường xung quanh chúng. Hãy cùng xem qua một số ví dụ để thấy công nghệ này đang biến đổi việc điều hướng trong các môi trường khác nhau như thế nào.
Link to this sectionRobot kho hàng điều hướng bằng thị giác máy tính#
Robot đang trở nên thiết yếu đối với tương lai của ngành logistics, đặc biệt là trong các hoạt động kho bãi quy mô lớn. Khi nhu cầu thương mại điện tử tăng lên, các công ty ngày càng dựa vào các máy móc hỗ trợ bởi thị giác máy tính để điều hướng các môi trường phức tạp, phân loại mặt hàng và quản lý hàng tồn kho với tốc độ và độ chính xác cao.
Lấy ví dụ, các trung tâm hoàn thiện đơn hàng của Amazon, nơi hơn 750.000 robot làm việc cùng với con người để giữ cho các hoạt động vận hành hiệu quả. Những robot này dựa nhiều vào thị giác máy tính để điều hướng các tầng kho bận rộn, xác định các mặt hàng và đưa ra các quyết định nhanh chóng, chính xác.
Một trong những hệ thống như vậy là Sequoia, một nền tảng robot được thiết kế để tăng tốc độ xử lý hàng tồn kho. Nó sử dụng thị giác máy tính tiên tiến để quét, đếm và tổ chức các sản phẩm sắp nhập kho, giúp hợp lý hóa các quy trình lưu trữ và truy xuất.
Tương tự, Vulcan, một cánh tay robot, sử dụng camera và phân tích hình ảnh để lấy các mặt hàng một cách an toàn từ kệ, điều chỉnh độ bám dựa trên hình dạng và vị trí của từng đối tượng và thậm chí nhận ra khi nào cần sự hỗ trợ của con người. Trong khi đó, Cardinal, một robot khác có tích hợp thị giác, chuyên về phân loại: nó quét các đống gói hàng hỗn hợp và đặt chúng một cách chính xác vào đúng các xe đẩy vận chuyển đi.

Hình 4. Cardinal nhấc các gói hàng chính xác từ một đống.
Link to this sectionThị giác máy tính trong điều hướng xe tự lái#
Cho đến nay, chúng ta đã thấy thị giác máy tính giúp cả con người và robot điều hướng môi trường của họ như thế nào. Nhưng nó cũng quan trọng không kém đối với các hệ thống tự hành, như xe tự lái, nơi việc điều hướng phụ thuộc hoàn toàn vào những gì phương tiện có thể nhìn thấy và hiểu trong thời gian thực.
Một ví dụ điển hình là hệ thống Tesla Vision. Tesla đã áp dụng phương pháp tiếp cận chỉ dựa trên camera đối với xe tự lái, loại bỏ radar và các cảm biến khác để thay thế bằng một mạng lưới camera cung cấp tầm nhìn toàn cảnh 360 độ về môi trường xung quanh xe. Các camera này cung cấp dữ liệu hình ảnh vào máy tính Full Self-Driving (FSD), sử dụng các mạng thần kinh sâu để diễn giải môi trường và đưa ra các quyết định lái xe trong tích tắc.
Dựa trên những gì nó nhìn thấy, hệ thống quyết định khi nào cần đánh lái, tăng tốc, phanh hoặc chuyển làn - giống như một người lái xe con người, nhưng hoàn toàn thông qua đầu vào hình ảnh. Tesla liên tục cải thiện hệ thống này bằng cách thu thập và học hỏi từ lượng lớn dữ liệu lái xe thực tế trên toàn bộ đội xe của mình.

Hình 5. Tesla sử dụng thị giác máy tính để điều hướng an toàn và tự động (Nguồn: Tesla).
Link to this sectionƯu điểm và nhược điểm của thị giác máy tính trong điều hướng#
Dưới đây là một số ưu điểm chính của việc sử dụng thị giác máy tính trong điều hướng, đặc biệt là trong các hệ thống nơi độ chính xác, an toàn và ra quyết định thời gian thực là điều cần thiết:
- Giảm tiêu thụ nhiên liệu: Bằng cách giúp người lái tránh ùn tắc giao thông và các tuyến đường dừng đỗ liên tục, thị giác máy tính có thể giảm mức tiêu thụ nhiên liệu tổng thể và thời gian di chuyển, giúp các chuyến đi hằng ngày hiệu quả hơn.
- Phát hiện độ mòn đường và các vấn đề về cơ sở hạ tầng: Các giải pháp dựa trên thị giác có thể quét tìm ổ gà, vạch kẻ làn đường bị mờ, biển báo bị hỏng và cơ sở hạ tầng bị hư hại, cung cấp cho các đội bảo trì dữ liệu đáng tin cậy trong thời gian thực.
- Tích hợp liền mạch với các công cụ AI khác: Thị giác máy tính có thể được kết hợp với trợ lý giọng nói, các mô hình dự đoán hành vi hoặc các thuật toán tối ưu hóa tuyến đường để tạo ra một trải nghiệm điều hướng thông minh và cá nhân hóa cao.
Mặc dù thị giác máy tính mang lại nhiều lợi ích cho việc điều hướng, nó cũng đi kèm với một vài hạn chế quan trọng cần xem xét khi triển khai các giải pháp như vậy. Dưới đây là một số thách thức chính cần ghi nhớ:
- Thiếu khả năng tổng quát hóa: Các mô hình được huấn luyện trên các môi trường hoặc kịch bản cụ thể thường gặp khó khăn khi được triển khai trong các bối cảnh mới hoặc đang thay đổi mà không cần huấn luyện lại.
- Hạn chế về ánh sáng: Các hệ thống thị giác dựa vào điều kiện ánh sáng tốt và thời tiết trong xanh để hoạt động tốt. Trong sương mù, mưa lớn hoặc bóng tối, hiệu suất của chúng sẽ giảm trừ khi được kết hợp với các cảm biến như LiDAR hoặc radar.
- Rủi ro về quyền riêng tư: Các hệ thống điều hướng sử dụng camera có thể ghi lại hình ảnh con người và tài sản cá nhân mà không có sự đồng ý. Điều này làm dấy lên các vấn đề về quyền riêng tư cần được giải quyết cẩn thận trong quá trình phát triển và triển khai.
Link to this sectionCác điểm chính cần lưu ý#
Thị giác máy tính đang tái tạo việc điều hướng bằng cách làm cho bản đồ trở nên năng động hơn, hệ thống giao thông thông minh hơn và khả năng di chuyển dễ tiếp cận hơn. Những gì từng là các tuyến đường tĩnh giờ đây là các trải nghiệm tương tác thời gian thực - được hỗ trợ bởi các bản xem trước 3D sống động, chỉ dẫn bằng AR và các công nghệ vận tải tự hành.
Khi công nghệ tiến bộ, có khả năng trọng tâm sẽ chuyển sang việc làm cho các hệ thống này trở nên hòa nhập, thích ứng và có trách nhiệm hơn. Sự tiến bộ liên tục sẽ phụ thuộc vào việc cải thiện độ chính xác trên các môi trường đa dạng, duy trì hiệu suất đáng tin cậy và bảo vệ quyền riêng tư của người dùng. Tương lai của thị giác máy tính trong điều hướng nằm ở việc xây dựng các giải pháp không chỉ thông minh mà còn chu đáo trong thiết kế và tác động của chúng.
Hãy tham gia cộng đồng đang phát triển của chúng tôi! Khám phá kho lưu trữ GitHub của chúng tôi để tìm hiểu về AI và xem qua các tùy chọn cấp phép của chúng tôi để bắt đầu các dự án AI thị giác của bạn. Bạn quan tâm đến các đổi mới như AI trong bán lẻ và thị giác máy tính trong nông nghiệp? Hãy truy cập các trang giải pháp của chúng tôi để khám phá thêm!






