Các model phát hiện đối tượng tốt nhất năm 2025
Khám phá các model phát hiện đối tượng tốt nhất năm 2026, cùng cái nhìn tổng quan về các kiến trúc phổ biến, sự đánh đổi về hiệu năng và các yếu tố triển khai thực tế.
Đầu năm nay, Andrew Ng, một nhà tiên phong trong lĩnh vực AI và machine learning, đã giới thiệu khái niệm agentic object detection. Phương pháp này sử dụng một agent suy luận để phát hiện các đối tượng dựa trên một text prompt mà không yêu cầu lượng dữ liệu huấn luyện khổng lồ.
Khả năng nhận diện đối tượng trong hình ảnh và video mà không cần tập dữ liệu gán nhãn lớn là một bước tiến hướng tới các hệ thống computer vision thông minh và linh hoạt hơn. Tuy nhiên, agentic vision AI vẫn đang trong giai đoạn đầu phát triển.
Mặc dù có thể xử lý các tác vụ chung, chẳng hạn như phát hiện người hoặc biển báo giao thông trong hình ảnh, nhưng các ứng dụng computer vision đòi hỏi độ chính xác cao hơn vẫn dựa vào các model object detection truyền thống. Các model này được huấn luyện trên những tập dữ liệu lớn, được gán nhãn cẩn thận để học chính xác những gì cần tìm và vị trí của các đối tượng đó.
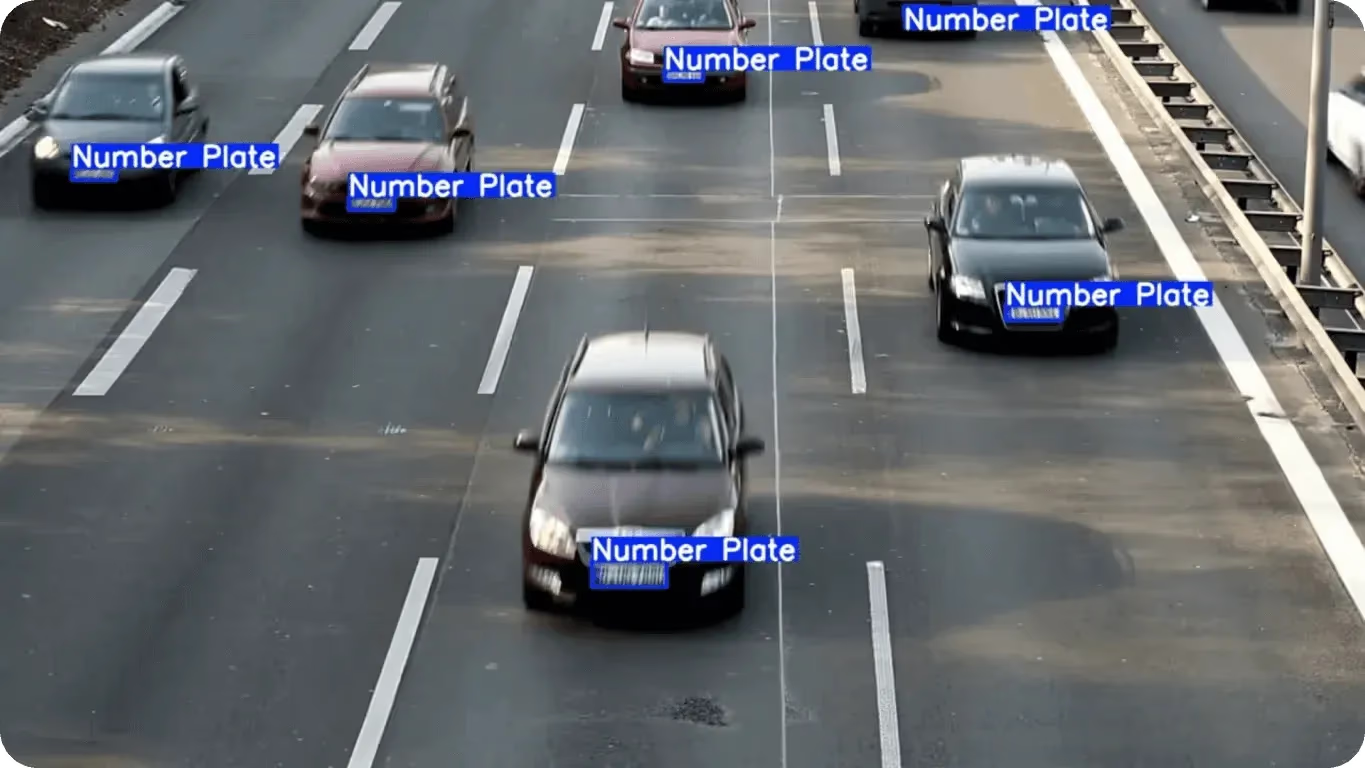
Hình 1. Một ví dụ về object detection. (Nguồn)
Kỹ thuật object detection truyền thống rất quan trọng vì nó cung cấp cả khả năng nhận diện (xác định đối tượng là gì) và khả năng localization (xác định chính xác đối tượng nằm ở đâu trong hình ảnh). Sự kết hợp này cho phép máy móc thực hiện các tác vụ phức tạp trong thế giới thực một cách đáng tin cậy, từ xe tự lái đến tự động hóa công nghiệp và chẩn đoán y tế.
Nhờ những tiến bộ công nghệ, các model object detection đang tiếp tục cải thiện, trở nên nhanh hơn, chính xác hơn và phù hợp hơn với các môi trường thực tế. Trong bài viết này, chúng ta sẽ xem xét một số model object detection tốt nhất hiện nay. Hãy cùng bắt đầu!
Link to this sectionNhu cầu về object detection#
Computer vision tasks như image classification có thể được sử dụng để xác định liệu một hình ảnh có chứa ô tô, con người hay vật thể khác hay không. Tuy nhiên, chúng không thể xác định vị trí của đối tượng đó trong hình ảnh.
Đây là lúc object detection trở nên hữu ích. Các model object detection có thể xác định những đối tượng nào đang hiện diện và chỉ ra vị trí chính xác của chúng. Quá trình này, được gọi là localization, cho phép máy móc hiểu các cảnh quay chính xác hơn và phản ứng phù hợp, dù là dừng xe tự lái, điều khiển cánh tay robot hay làm nổi bật một vùng trong chẩn đoán hình ảnh y tế.
Sự trỗi dậy của deep learning đã thay đổi object detection. Thay vì dựa vào các quy tắc được mã hóa thủ công, các model hiện đại học các mẫu trực tiếp từ chú thích và dữ liệu hình ảnh. Các tập dữ liệu này dạy cho model biết đối tượng trông như thế nào, nơi chúng thường xuất hiện và cách xử lý các thách thức như đối tượng nhỏ, cảnh quay lộn xộn hoặc điều kiện ánh sáng thay đổi.
Trên thực tế, các hệ thống object detection hiện đại nhất có thể phát hiện chính xác nhiều đối tượng cùng một lúc. Điều này làm cho object detection trở thành công nghệ thiết yếu trong các ứng dụng như lái xe tự động, robotics, y tế và tự động hóa công nghiệp.
Link to this sectionCách các tác vụ object detection hoạt động#
Đầu vào của một model object detection là một hình ảnh, có thể đến từ camera, khung hình video hoặc thậm chí là bản quét y tế. Hình ảnh đầu vào được xử lý thông qua một neural network, thường là convolutional neural network (CNN), được huấn luyện để nhận diện các mẫu trong dữ liệu thị giác.
Bên trong network, hình ảnh được phân tích theo từng giai đoạn. Dựa trên các đặc trưng phát hiện được, model dự đoán đối tượng nào đang hiện diện và vị trí xuất hiện của chúng.
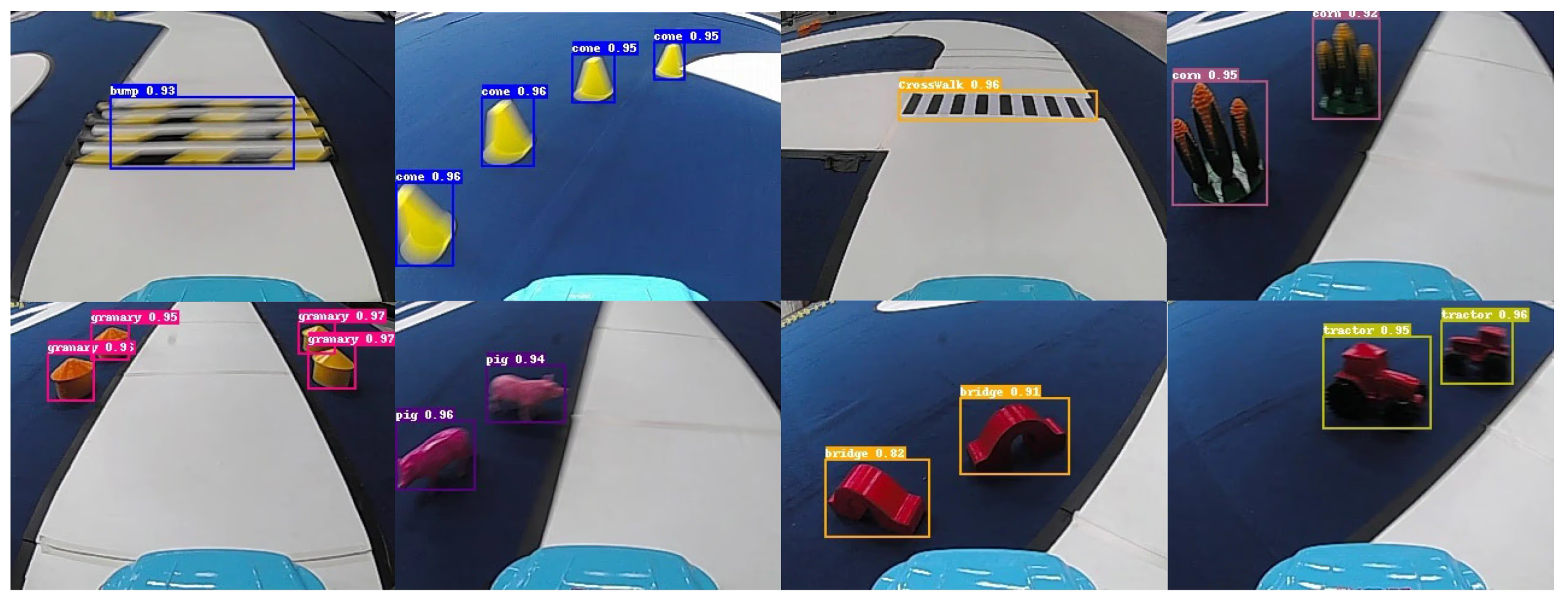
Các dự đoán này được thể hiện bằng bounding box, là các hình chữ nhật được vẽ xung quanh mỗi đối tượng được phát hiện. Đối với mỗi bounding box, model gán một class label (ví dụ: ô tô, người hoặc chó) và confidence score cho biết mức độ chắc chắn về dự đoán (điều này cũng có thể được coi là xác suất).
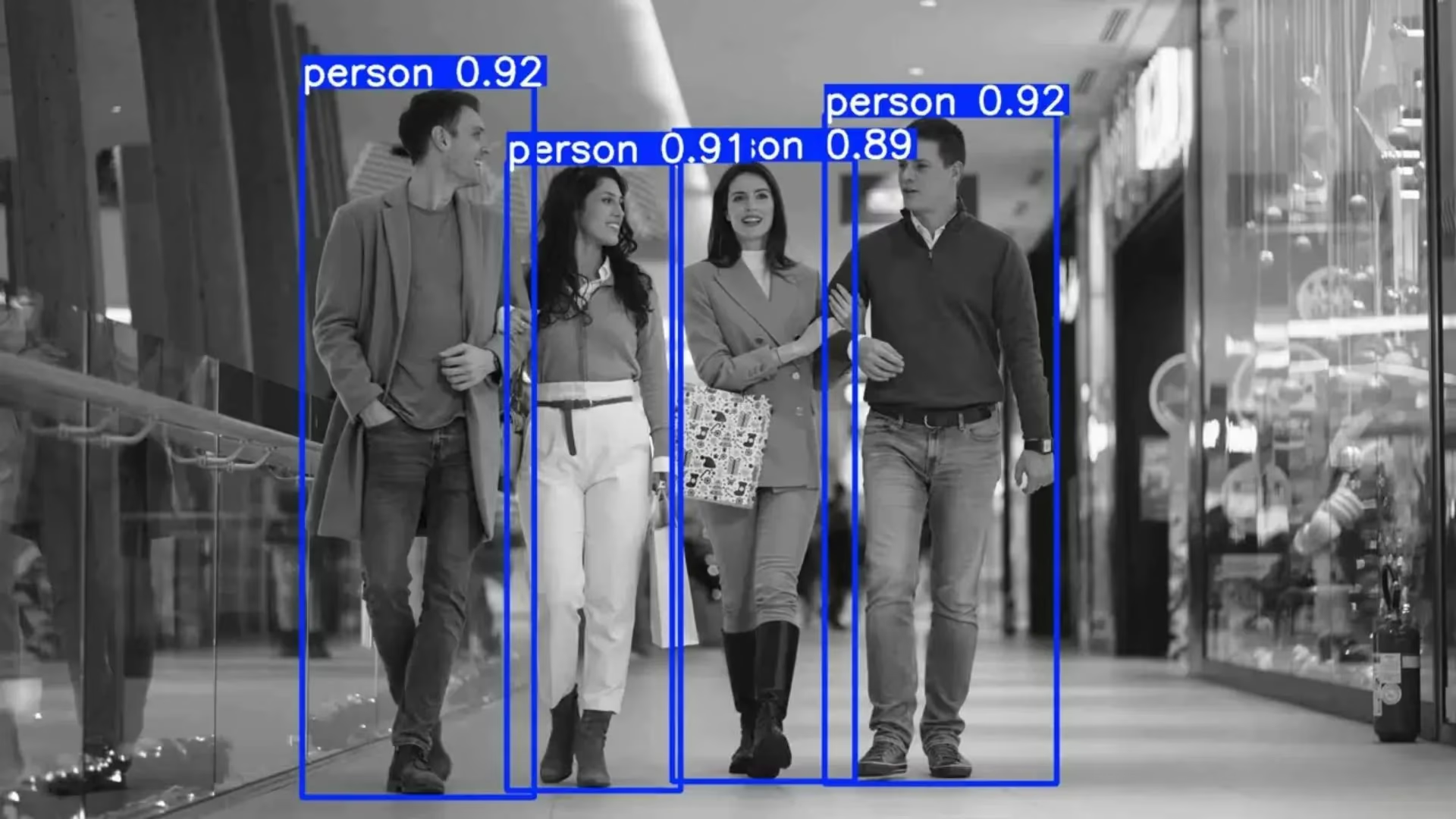
Hình 2. Các dự đoán object detection có thể được trực quan hóa bằng bounding box.
Quy trình tổng thể dựa nhiều vào trích xuất đặc trưng (feature extraction). Model học cách nhận diện các mẫu thị giác hữu ích, chẳng hạn như cạnh, hình dạng, kết cấu và các đặc điểm phân biệt khác. Các mẫu này được mã hóa thành các feature map, giúp network hiểu hình ảnh ở nhiều cấp độ chi tiết khác nhau.
Link to this sectionPhát hiện đối tượng: Hai giai đoạn và một giai đoạn#
Tùy thuộc vào architecture của model, các trình phát hiện đối tượng sử dụng các chiến lược khác nhau để định vị, cân bằng giữa tốc độ, độ chính xác và độ phức tạp.
Nhiều model object detection, đặc biệt là các detector hai giai đoạn như Faster R-CNN, tập trung vào các phần cụ thể của hình ảnh được gọi là regions of interest (ROIs). Bằng cách tập trung vào các khu vực này, model ưu tiên các vùng có khả năng chứa đối tượng hơn là phân tích mọi pixel như nhau.
Mặt khác, các model một giai đoạn như các model YOLO đời đầu không chọn các ROI cụ thể như các model hai giai đoạn. Thay vào đó, chúng chia hình ảnh thành một lưới và sử dụng các hộp được định nghĩa trước, gọi là anchor box, cùng với các feature map để dự đoán đối tượng trên toàn bộ hình ảnh trong một lượt truyền.
Ngày nay, các model object detection tiên tiến đang khám phá các phương pháp anchor-free. Không giống như các model một giai đoạn truyền thống dựa vào các anchor box được định nghĩa trước, các model anchor-free dự đoán vị trí và kích thước đối tượng trực tiếp từ các feature map. Điều này có thể đơn giản hóa architecture, giảm chi phí tính toán và cải thiện hiệu suất, đặc biệt là khi phát hiện các đối tượng có hình dạng và kích thước khác nhau.
Link to this sectionNhìn vào các model object detection tốt nhất#
Ngày nay, có rất nhiều model object detection, mỗi model được thiết kế với các mục tiêu cụ thể. Một số được tối ưu hóa cho hiệu suất thời gian thực, trong khi những model khác tập trung vào việc đạt được độ chính xác cao nhất. Việc chọn đúng model cho một giải pháp computer vision thường phụ thuộc vào trường hợp sử dụng cụ thể và yêu cầu hiệu suất của bạn.
Tiếp theo, hãy cùng khám phá một số model phát hiện vật thể tốt nhất năm 2026.
Link to this sectionCác model Ultralytics YOLO#
Một trong những họ model object detection được sử dụng rộng rãi nhất hiện nay là họ model Ultralytics YOLO. YOLO, viết tắt của You Only Look Once, rất phổ biến trong các ngành công nghiệp vì nó mang lại hiệu suất phát hiện mạnh mẽ đồng thời nhanh chóng, đáng tin cậy và dễ làm việc.
Họ Ultralytics YOLO bao gồm Ultralytics YOLOv5, Ultralytics YOLOv8, Ultralytics YOLO11 và Ultralytics YOLO26 sắp ra mắt, cung cấp một loạt các tùy chọn cho các yêu cầu về hiệu suất và trường hợp sử dụng khác nhau. Nhờ thiết kế gọn nhẹ và tối ưu hóa tốc độ, các model Ultralytics YOLO là lựa chọn lý tưởng cho phát hiện thời gian thực và có thể được triển khai trên các thiết bị biên với khả năng tính toán và bộ nhớ hạn chế.
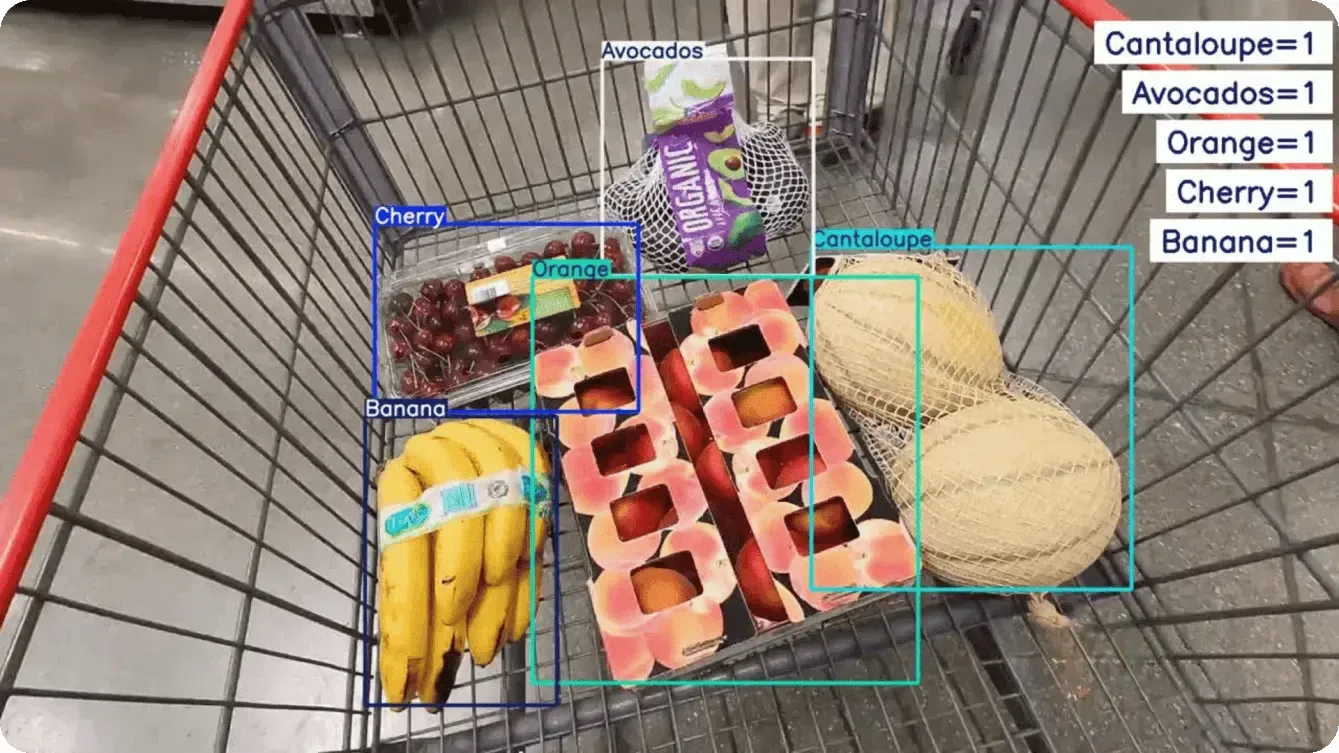
Hình 3. Sử dụng Ultralytics YOLO11 cho object detection (Nguồn)
Ngoài object detection cơ bản, các model này còn rất linh hoạt. Chúng cũng hỗ trợ các tác vụ như instance segmentation, giúp vạch đường viền đối tượng ở cấp độ pixel và pose estimation, giúp nhận diện các điểm chính trên người hoặc vật thể. Sự linh hoạt này làm cho các model Ultralytics YOLO trở thành lựa chọn ưu tiên cho nhiều ứng dụng, từ nông nghiệp, logistics đến bán lẻ và sản xuất.
Một lý do chính khác cho sự phổ biến của các model Ultralytics YOLO là Ultralytics Python package, cung cấp một giao diện đơn giản và thân thiện với người dùng để huấn luyện, fine-tune và triển khai model. Các nhà phát triển có thể bắt đầu với pre-trained weights, tùy chỉnh model cho tập dữ liệu của riêng mình và triển khai chúng chỉ với vài dòng code.
Link to this sectionRT-DETR và RT-DETRv2#
RT‑DETR (Real-Time Detection Transformer) và phiên bản mới hơn RT‑DETRv2 là các model object detection được xây dựng cho mục đích sử dụng thời gian thực. Không giống như nhiều model truyền thống, chúng có thể nhận hình ảnh và đưa ra các kết quả phát hiện cuối cùng trực tiếp mà không cần sử dụng non-maximum suppression (NMS).
NMS là một bước giúp loại bỏ các hộp chồng chéo thừa khi một model dự đoán cùng một đối tượng nhiều lần. Việc bỏ qua NMS giúp quá trình phát hiện trở nên đơn giản và nhanh chóng hơn.
Các model này kết hợp CNN với các Transformer. CNN tìm các chi tiết thị giác như cạnh và hình dạng, trong khi Transformer là một loại neural network có thể nhìn vào toàn bộ hình ảnh cùng một lúc và hiểu cách các phần khác nhau liên quan đến nhau. Sự hiểu biết toàn diện này cho phép model phát hiện các đối tượng nằm gần nhau hoặc chồng chéo.
RT‑DETRv2 cải tiến so với model gốc với các tính năng như multi-scale detection, giúp tìm kiếm cả đối tượng nhỏ và lớn, cùng khả năng xử lý tốt hơn các cảnh quay phức tạp. Những thay đổi này giữ cho model luôn nhanh chóng trong khi cải thiện độ chính xác.
Link to this sectionRF-DETR#
RF‑DETR là một model thời gian thực dựa trên Transformer, được thiết kế để kết hợp độ chính xác của các Transformer architecture với tốc độ cần thiết cho các ứng dụng thực tế. Giống như RT‑DETR và RT‑DETRv2, nó sử dụng Transformer để phân tích toàn bộ hình ảnh và CNN để trích xuất các đặc trưng thị giác tinh vi như cạnh, hình dạng và kết cấu.
Model dự đoán đối tượng trực tiếp từ hình ảnh đầu vào, bỏ qua anchor box và non-maximum suppression, giúp đơn giản hóa quá trình phát hiện và giữ cho việc inference nhanh chóng. RF‑DETR cũng hỗ trợ instance segmentation, cho phép nó vạch đường viền đối tượng ở cấp độ pixel ngoài việc dự đoán bounding box.
Link to this sectionEfficientDet#
Được ra mắt vào cuối năm 2019, EfficientDet là một model object detection được thiết kế để mở rộng hiệu quả và đạt hiệu suất cao. Điểm khác biệt của EfficientDet là compound scaling, một phương pháp mở rộng độ phân giải đầu vào, độ sâu của network và độ rộng của network cùng một lúc thay vì chỉ điều chỉnh một yếu tố. Cách tiếp cận này giúp model duy trì độ chính xác ổn định dù được mở rộng cho các tác vụ hiệu suất cao hay thu gọn cho các triển khai nhẹ.
Một thành phần chính khác của EfficientDet là efficient feature pyramid network (FPN), cho phép model phân tích hình ảnh ở nhiều quy mô (multi-scale). Việc phân tích multi-scale này rất quan trọng để phát hiện các đối tượng có kích thước khác nhau, giúp EfficientDet xác định chính xác cả đối tượng nhỏ và lớn trong cùng một hình ảnh.
Link to this sectionPP-YOLOE+#
Được ra mắt vào năm 2022, PP-YOLOE+ là một model object detection theo phong cách YOLO, nghĩa là nó phát hiện và phân loại đối tượng trong một lượt truyền duy nhất qua hình ảnh. Cách tiếp cận này làm cho nó trở nên nhanh chóng và phù hợp với các ứng dụng thời gian thực, trong khi vẫn duy trì độ chính xác cao.
Một trong những cải tiến chính của PP-YOLOE+ là task-aligned learning, giúp confidence score của model phản ánh mức độ chính xác của vị trí đối tượng. Điều này đặc biệt hữu ích cho việc phát hiện các đối tượng nhỏ hoặc chồng chéo.
Hình 4. Phát hiện đối tượng bằng PP-YOLOE+ (Nguồn)
Model này cũng sử dụng decoupled head architecture, tách biệt các tác vụ dự đoán vị trí đối tượng và class label. Điều này cho phép nó vẽ bounding box chính xác hơn trong khi vẫn phân loại đối tượng đúng cách.
Link to this sectionGroundingDINO#
GroundingDINO là một model object detection dựa trên Transformer, kết hợp thị giác và ngôn ngữ. Thay vì dựa vào một tập hợp danh mục cố định, nó cho phép người dùng phát hiện đối tượng bằng các text prompt ngôn ngữ tự nhiên.
Bằng cách căn chỉnh các đặc trưng thị giác từ hình ảnh với các mô tả văn bản, model có thể định vị đối tượng ngay cả khi các nhãn đó không có trong dữ liệu huấn luyện của nó. Điều này có nghĩa là bạn có thể prompt model với các mô tả như “người đội mũ bảo hiểm” hoặc “ô tô đỏ gần tòa nhà” và nó sẽ tạo ra các bounding box chính xác xung quanh các đối tượng khớp với yêu cầu.
Ngoài ra, bằng cách hỗ trợ zero-shot detection, GroundingDINO giảm nhu cầu phải huấn luyện lại hoặc fine-tune model cho mỗi trường hợp sử dụng mới, giúp nó linh hoạt trên nhiều ứng dụng. Sự kết hợp giữa hiểu ngôn ngữ và nhận diện thị giác này mở ra những khả năng mới cho các hệ thống AI tương tác và thích ứng.
Link to this sectionCác chỉ số phổ biến được sử dụng để đánh giá các trình phát hiện đối tượng#
Khi bạn so sánh các model object detection khác nhau, bạn có thể tự hỏi làm thế nào để biết model nào thực sự hoạt động tốt nhất. Đây là một câu hỏi hay, bởi vì ngoài architecture của model và chất lượng dữ liệu, nhiều yếu tố có thể ảnh hưởng đến hiệu suất.
Các nhà nghiên cứu thường dựa vào các tiêu chuẩn chung (benchmarks) và các chỉ số hiệu suất tiêu chuẩn để đánh giá model một cách nhất quán, so sánh kết quả và hiểu được sự đánh đổi giữa tốc độ và độ chính xác. Các tiêu chuẩn này đặc biệt quan trọng vì nhiều model object detection được đánh giá trên cùng một tập dữ liệu, chẳng hạn như tập dữ liệu COCO.
Link to this sectionĐo lường độ chính xác và tốc độ phát hiện#
Dưới đây là cái nhìn chi tiết hơn về một số chỉ số phổ biến được sử dụng để đánh giá các model object detection:
- Intersection over union (IoU): Chỉ số này đo lường mức độ chồng chéo của bounding box dự đoán với đối tượng thực tế trong hình ảnh. Nó so sánh hộp do model vẽ với ground-truth box, là vị trí đối tượng đã được gán nhãn trong tập dữ liệu. IoU được tính bằng diện tích chồng chéo chia cho diện tích hợp của hai hộp. IoU cao hơn cho thấy model đang đặt hộp chính xác hơn, trong khi IoU thấp hơn có nghĩa là dự đoán kém chính xác hơn. Nói một cách đơn giản, IoU cho thấy các dự đoán của model khớp với vị trí đối tượng thực tế đến mức nào.
- Mean average precision (mAP): Đây là chỉ số chính được sử dụng để đánh giá hiệu suất object detection tổng thể. Nó tính đến cả số lượng đối tượng mà model phát hiện chính xác và độ chính xác của các phát hiện đó trên các mức độ tin cậy và danh mục đối tượng khác nhau.
- Frames per second (FPS) và latency: FPS cho biết model có thể xử lý bao nhiêu hình ảnh hoặc khung hình video trong một giây. Ví dụ, một model chạy ở 30 FPS có thể xử lý 30 khung hình mỗi giây. FPS cao hơn có nghĩa là hệ thống có thể phản hồi nhanh hơn, điều này rất quan trọng đối với các trường hợp sử dụng như video trực tiếp, giám sát giao thông hoặc robotics. Mặt khác, latency đo lường thời gian cần thiết để model xử lý một hình ảnh hoặc khung hình duy nhất kể từ thời điểm nó được nhận cho đến khi có kết quả.
Link to this sectionƯu và nhược điểm của việc sử dụng các thuật toán object detection#
Dưới đây là một số ưu điểm chính của việc sử dụng các model object detection trong các ứng dụng thực tế:
- Có thể mở rộng quy mô trên nhiều ngành: Object detection có thể được áp dụng cho nhiều trường hợp sử dụng, từ giám sát giao thông và phân tích bán lẻ đến y tế, nông nghiệp và sản xuất.
- Giảm nỗ lực thủ công: Tự động hóa các tác vụ kiểm tra và giám sát bằng hình ảnh giúp giảm nhu cầu giám sát liên tục của con người và giúp các nhóm tập trung vào các công việc có giá trị cao hơn.
- Hưởng lợi từ hệ sinh thái mã nguồn mở: Các cộng đồng mã nguồn mở năng động và các tài nguyên trên GitHub giúp việc truy cập các pre-trained model, thử nghiệm và tùy chỉnh giải pháp trở nên dễ dàng hơn.
Bất chấp những ưu điểm này, có những hạn chế thực tế có thể ảnh hưởng đến cách các model object detection hoạt động. Dưới đây là một số yếu tố quan trọng cần xem xét:
- Yêu cầu về dữ liệu chất lượng cao: Các model object detection dựa vào các tập dữ liệu lớn và được gán nhãn tốt để huấn luyện. Việc tạo và duy trì dữ liệu này có thể tốn thời gian, tốn kém và khó mở rộng quy mô.
- Nhu cầu tính toán: Các model mang lại độ chính xác phát hiện cao hơn thường đòi hỏi sức mạnh xử lý đáng kể, cả trong quá trình huấn luyện và triển khai thời gian thực. Điều này thường có nghĩa là phải sử dụng các GPU hiệu suất cao, có thể làm tăng chi phí cơ sở hạ tầng.
- Độ nhạy với các điều kiện thực tế: Sự thay đổi về ánh sáng, góc camera, thời tiết và cảnh quay đông đúc có thể ảnh hưởng đến hiệu suất phát hiện, khiến việc kiểm tra và tinh chỉnh liên tục trở nên cần thiết.
Link to this sectionCác điểm chính cần lưu ý#
Model object detection tốt nhất cho dự án computer vision của bạn phụ thuộc vào trường hợp sử dụng, cách thiết lập dữ liệu, yêu cầu hiệu suất và các ràng buộc phần cứng. Một số model được tối ưu hóa cho tốc độ, trong khi những model khác tập trung vào độ chính xác và hầu hết các ứng dụng thực tế đều cần sự cân bằng giữa cả hai. Nhờ các framework mã nguồn mở và các cộng đồng năng động trên GitHub, các model này đang trở nên dễ dàng hơn để đánh giá, điều chỉnh và triển khai cho mục đích sử dụng thực tế.
Để tìm hiểu thêm, hãy khám phá GitHub repository của chúng tôi. Tham gia community của chúng tôi và xem qua các trang giải pháp của chúng tôi để đọc về các ứng dụng như AI in healthcare và computer vision in the automotive ngành. Khám phá các licensing options của chúng tôi để bắt đầu với vision AI ngay hôm nay.






