Costruisci applicazioni per droni basate sull'IA con Ultralytics YOLO11
Scopri come costruire applicazioni per droni basate sull'IA con Ultralytics YOLO11, consentendo il rilevamento di oggetti in tempo reale e compiti di visione artificiale basati su droni.

Gli acquisti in negozio e quelli online possono sembrare simili, ma si basano su logiche diverse. I negozi devono rifornire gli scaffali, mentre gli ordini online dipendono dalle consegne a domicilio. Grazie ai progressi tecnologici, entrambe le esperienze di acquisto si stanno trasformando in parallelo.
Ad esempio, è in corso un cambiamento importante nelle consegne. I droni basati sull'IA stanno cambiando il modo in cui i prodotti arrivano a casa nostra. Si prevede che questi droni intelligenti gestiranno circa 808 milioni di consegne nel prossimo decennio, trasformando i cieli nella nuova rotta di consegna per il commercio quotidiano.
I droni per le consegne utilizzano l'intelligenza artificiale (IA) e la computer vision, un sottocampo dell'IA usato per analizzare dati visivi, per navigare e muoversi tra gli ostacoli. I modelli di computer vision come Ultralytics YOLO11 possono aiutare i droni a rilevare e tracciare oggetti in tempo reale, permettendo loro di comprendere meglio e interagire con l'ambiente circostante.

Fig 1. Un drone per consegne che trasporta un pacco verso la sua destinazione.
Aziende come Meituan e DJI stanno già integrando la computer vision nei loro droni. Di fatto, la rapida adozione dei droni in vari settori ha preparato il mercato dei droni basati su IA a raggiungere i 206,9 miliardi di dollari entro il 2031.
In questo articolo, esamineremo più da vicino come i modelli di computer vision come Ultralytics YOLO11 possano essere utilizzati in applicazioni basate su droni, come le consegne. Vedremo un esempio che mostrerà come queste tecnologie possano essere sviluppate e testate prima di essere utilizzate in scenari reali.
Link to this sectionUtilizzare Ultralytics YOLO11 sui droni per rilevare case#
Una parte fondamentale dei droni per le consegne è la loro capacità di rilevare case durante la navigazione. Per ricreare questa funzionalità e capire come funziona, addestreremo un modello di computer vision in grado di identificare le case nei filmati catturati da un drone aereo. Per farlo, addestreremo in modo personalizzato YOLO11, il che implica il fine-tuning di un modello YOLO11 pre-addestrato per riconoscere e rilevare case utilizzando esempi etichettati.
Per fare ciò, avremo bisogno di dati video di alta qualità provenienti da un drone. Curiosamente, anche senza avere accesso a un drone reale, possiamo comunque generare filmati aerei realistici. Diamo un'occhiata a come.
Link to this sectionCreare una ripresa artificiale con drone usando Google Earth Studio#
Google Earth Studio è uno strumento di animazione basato sul web che gli utenti possono utilizzare per creare contenuti statici e animati sfruttando le immagini satellitari e 3D di Google Earth. Possiamo usarlo per creare riprese aeree realistiche.
Il primo passo è aprire Google Earth Studio e creare un progetto, come mostrato di seguito.
Avrai bisogno di un account Google per accedere.
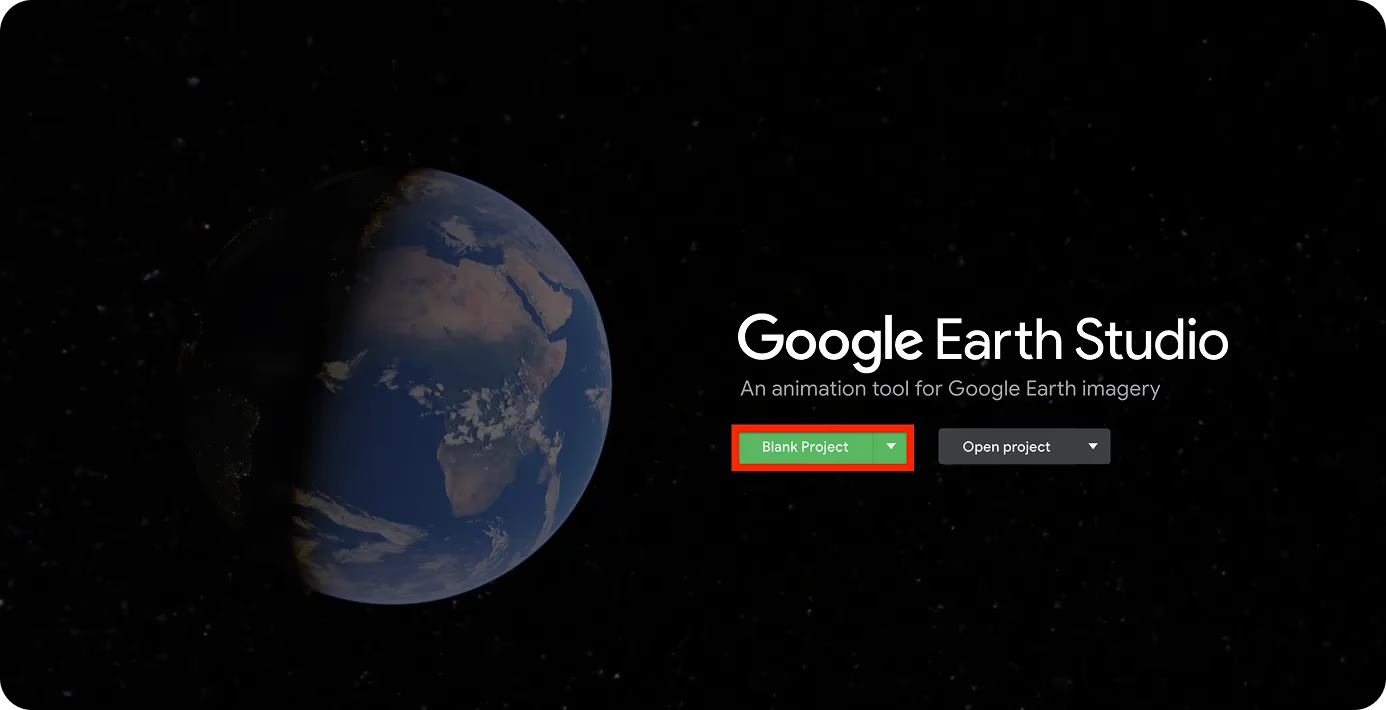
Fig 2. Creazione di un progetto su Google Earth Studio.
Una volta effettuato l'accesso, puoi scegliere una posizione per il tuo video artificiale da drone. Usando la barra di ricerca nell'angolo in alto a sinistra della pagina, puoi cercare le posizioni. Per questo tutorial, sceglieremo il Canada. Inoltre, poiché addestreremo un modello per rilevare case, il nostro video da drone dovrebbe avere una vista aerea di case.
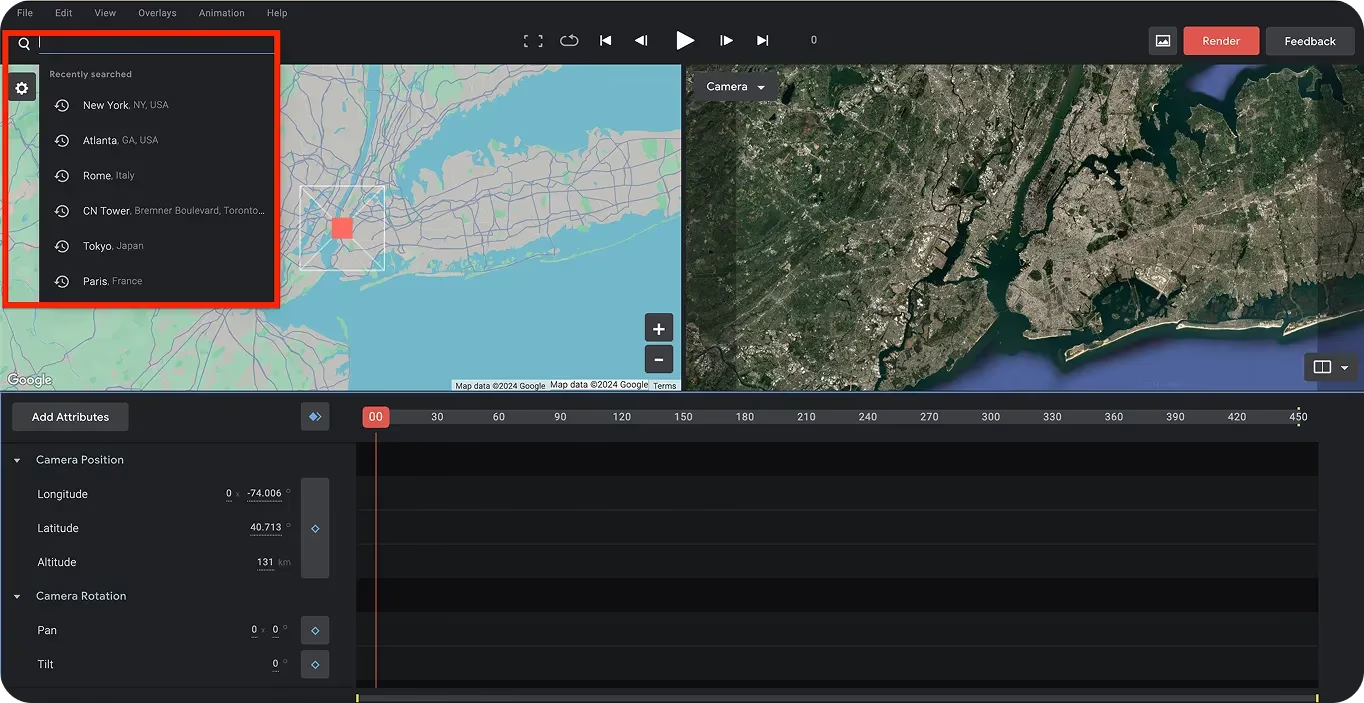
Fig 3. Scelta di una posizione usando Google Earth Studio.
Successivamente, possiamo impostare il primo e l'ultimo fotogramma per catturare il movimento della ripresa artificiale del drone. Una volta scelta la posizione di partenza per la ripresa del drone, imposta il primo fotogramma usando i rombi blu, come mostrato di seguito.
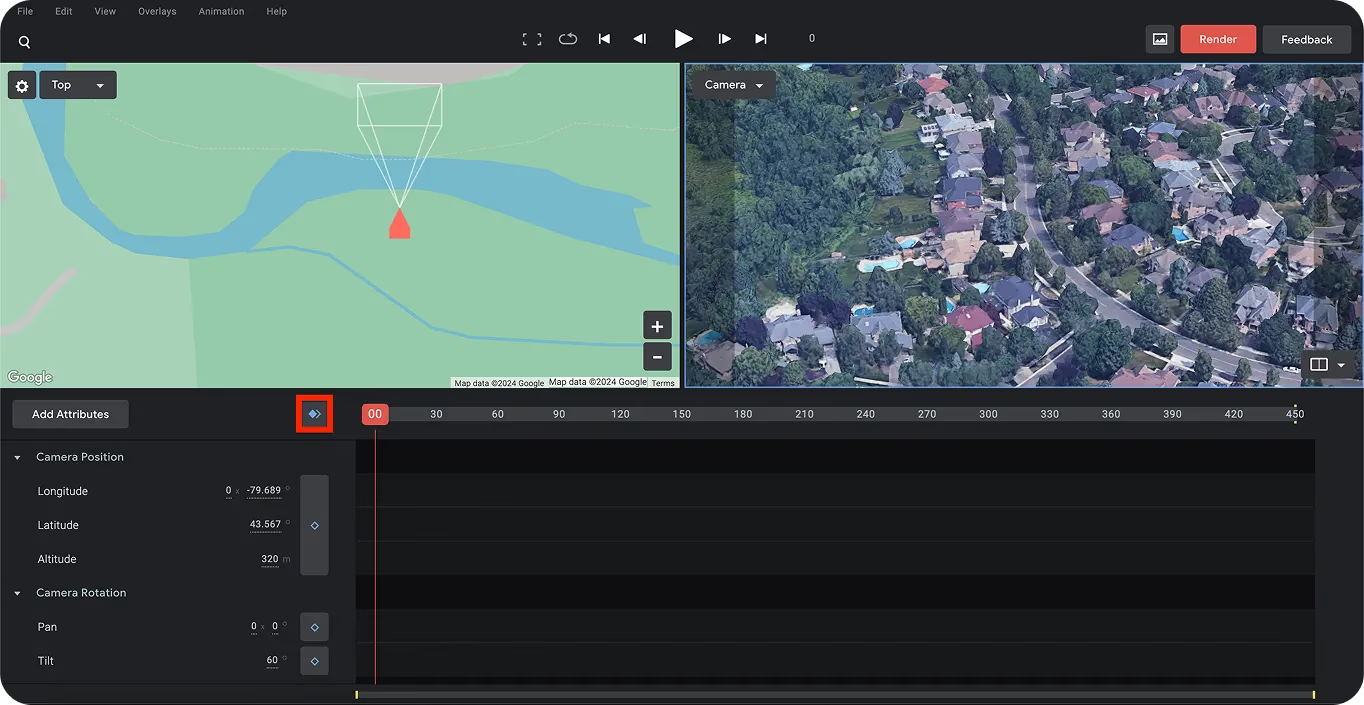
Fig 4. Impostazione del primo fotogramma usando i rombi blu.
Successivamente, possiamo scegliere l'ultimo fotogramma per determinare la destinazione del drone. Questo ci aiuterà a creare un effetto di movimento per il filmato del drone. Per farlo, fai scorrere la barra (evidenziata sotto) verso destra fino a un momento specifico per creare l'effetto di movimento per la ripresa del drone. Ancora una volta, usa i rombi blu per impostare l'ultimo punto.
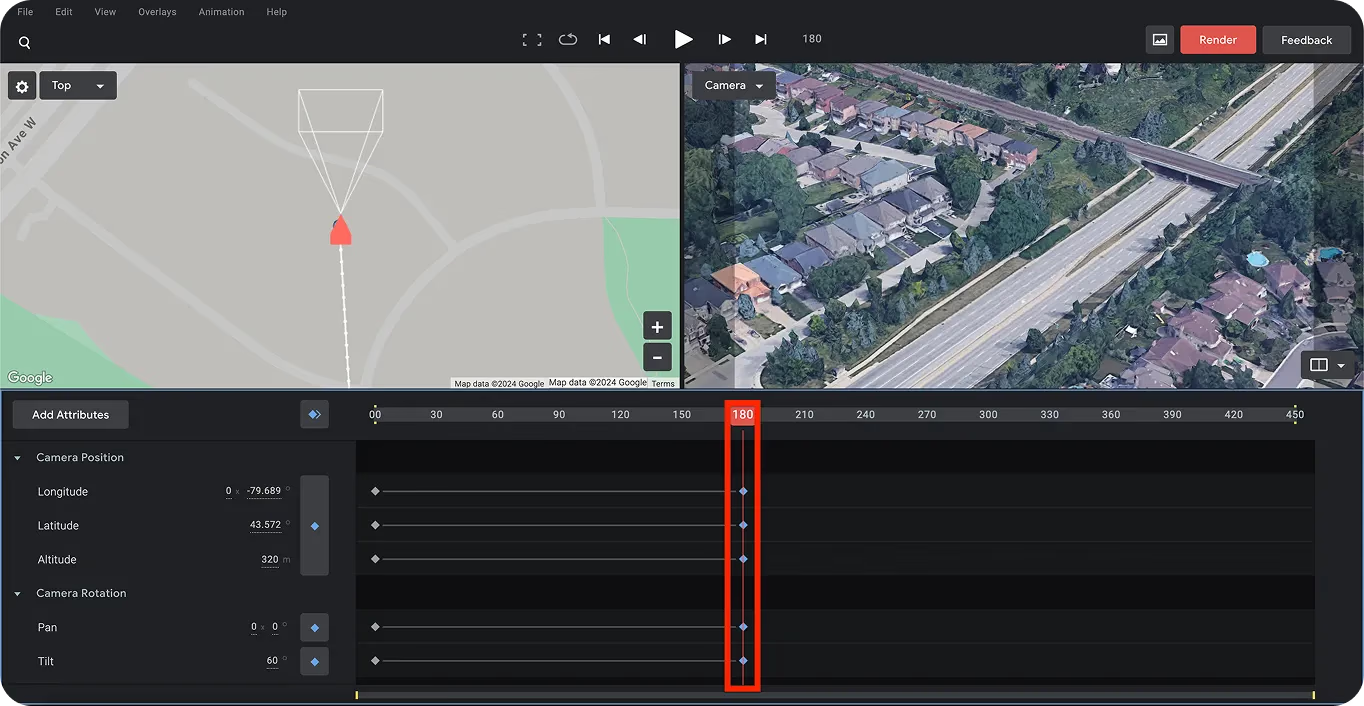
Fig 5. Impostazione dell'ultimo fotogramma spostando la barra.
Infine, puoi salvare questo progetto ed esportarlo cliccando sul pulsante rosso “Render” nell'angolo in alto a destra della pagina. Questo ti fornirà il video finale della ripresa del drone, creando con successo un filmato artificiale da drone.
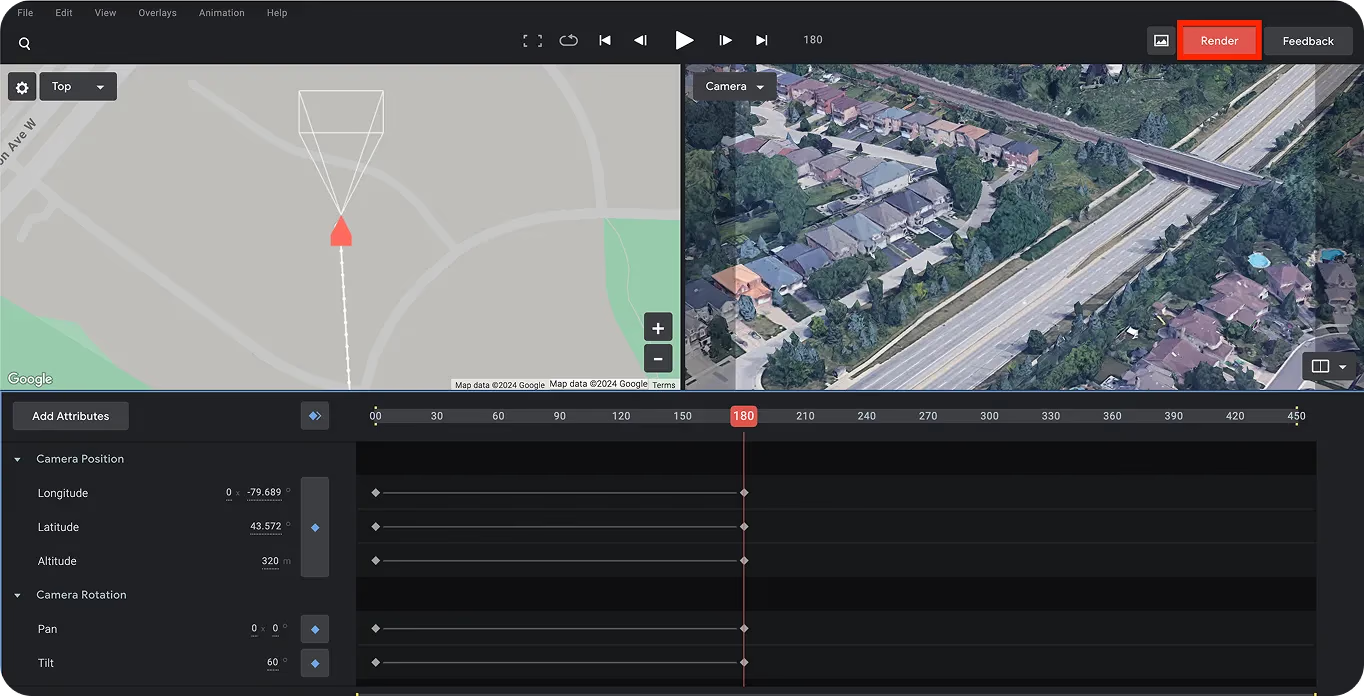
Fig 6. Esportazione del video finale.
Link to this sectionCome etichettare i dati del drone?#
Ora che abbiamo creato il filmato artificiale da drone, il passo successivo è etichettare o annotare le case presenti. Dovremo anche separare i singoli fotogrammi del video.
Per iniziare, installeremo LabelImg. LabelImg è uno strumento open-source per l'etichettatura delle immagini. Puoi installarlo direttamente dal terminale usando il gestore di pacchetti pip eseguendo il seguente comando: “pip install labelImg”.
Dopo l'installazione, puoi eseguire lo strumento usando il comando ‘labelImg’ nel tuo terminale o prompt dei comandi. Questo ti porterà alla pagina mostrata di seguito.
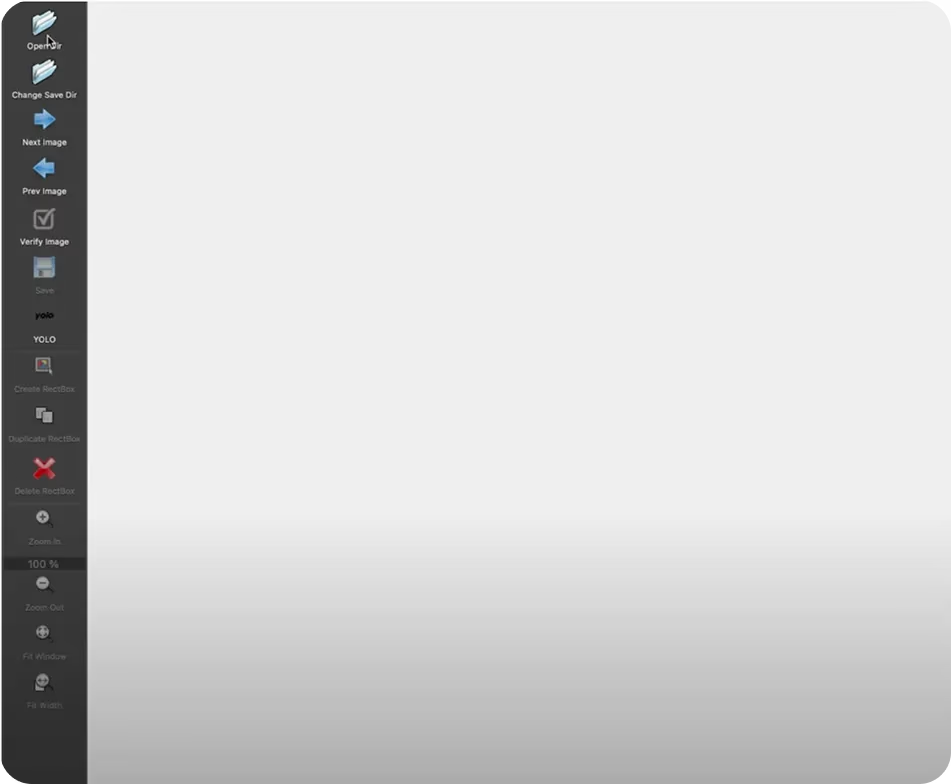
Fig 7. L'interfaccia dello strumento LabelImg.
Nel frattempo, possiamo usare un convertitore online da video a immagini o uno strumento chiamato FFmpeg per dividere il video in fotogrammi. FFmpeg è una raccolta di librerie e strumenti per elaborare contenuti multimediali come audio, video, sottotitoli e relativi metadati.
Puoi usare il seguente comando da terminale per separare ogni fotogramma del video del drone:
ffmpeg -i input_video.mp4 frame_%04d.pngUna volta separati i fotogrammi del filmato del drone, possiamo iniziare a etichettare gli oggetti (case) in essi. Navigando nella cartella delle immagini tramite lo strumento LabelImg, possiamo etichettare gli oggetti in ogni immagine. Assicurati di salvare e verificare ogni immagine etichettata. Dopo aver annotato le immagini, possiamo passare all'addestramento di YOLO11 utilizzando questi dati.
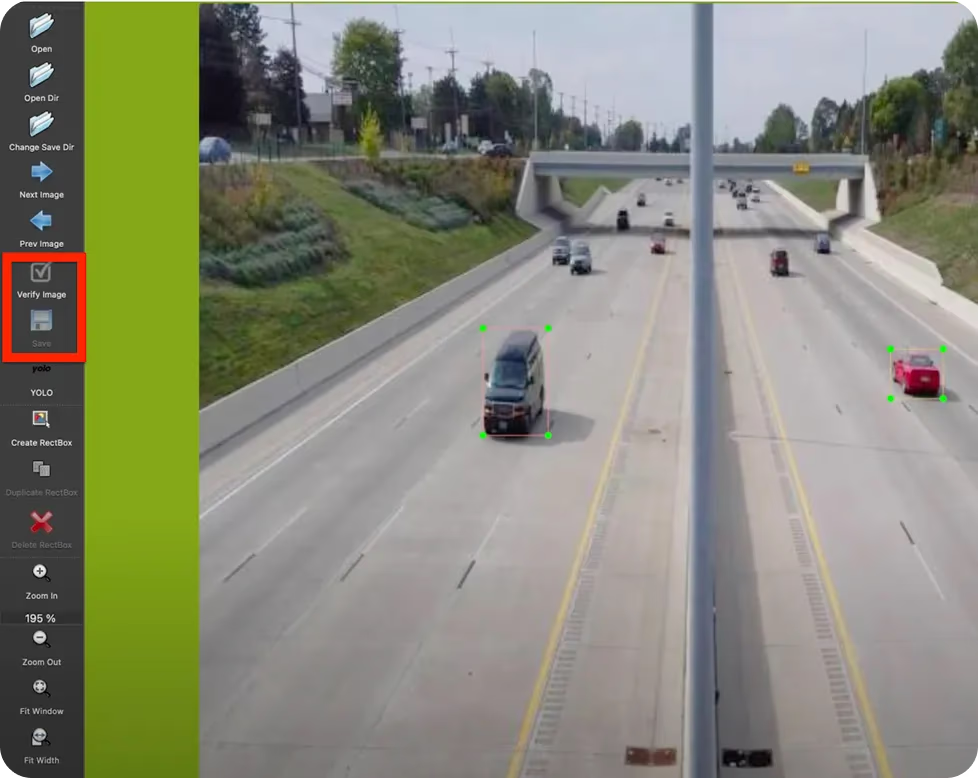
Fig 8. Un esempio di salvataggio delle immagini annotate.
Link to this sectionFlusso di lavoro per l'addestramento del modello YOLO11#
Prima di iniziare l'addestramento di YOLO11, organizzeremo le nostre immagini ed etichette. Inizia creando due cartelle: una chiamata "train" e l'altra "valid". Dividi le tue immagini tra queste cartelle. All'interno di ciascuna, crea sottocartelle separate per le immagini e i relativi file di etichetta (formato testo), come mostrato di seguito.
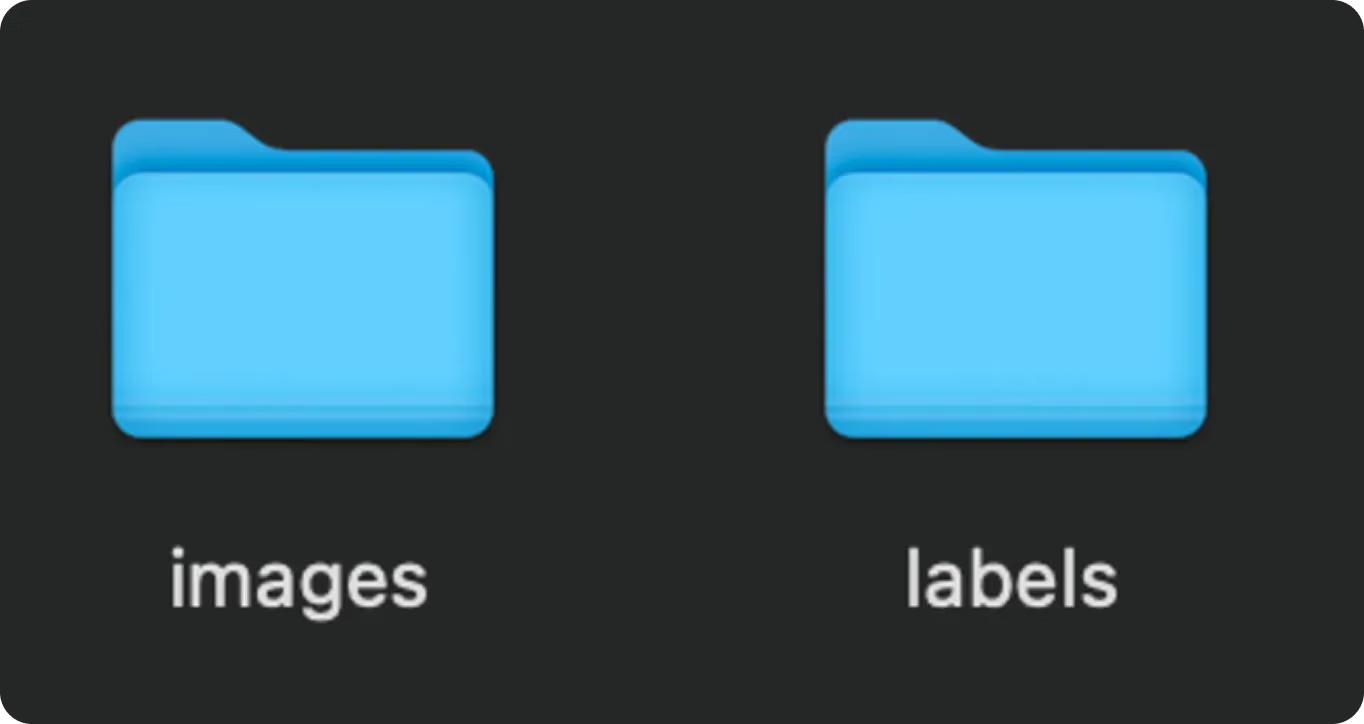
Fig 9. Un esempio di creazione di cartelle per immagini ed etichette.
Quindi, possiamo iniziare ad addestrare il modello YOLO11 come segue:
- Passaggio 1: Installa il pacchetto Python di Ultralytics. Puoi farlo eseguendo il comando “pip install ultralytics” nel tuo terminale. Se riscontri problemi di installazione, consulta la nostra guida alla risoluzione dei problemi per suggerimenti e trucchi che ti aiuteranno a risolverli.
- Passaggio 2: Dopo aver installato correttamente il pacchetto, crea un file chiamato ‘data.yaml’. Questo è un file di configurazione cruciale per l'addestramento del modello. Nel file data.yaml, includi le seguenti informazioni: il percorso al tuo set di dati di addestramento, il percorso al tuo set di dati di validazione, il numero di classi (nc) e un elenco dei nomi delle classi (names), come mostrato di seguito.

Fig 10. Un esempio di file data.yaml.
- Passaggio 3: Una volta configurato il file ‘data.yaml’, puoi iniziare ad addestrare il tuo modello usando il seguente codice Python. Questo codice carica il modello YOLO11 pre-addestrato e lo addestra in base alle tue configurazioni.
from ultralytics import YOLO
# Load a YOLO11 model
model = YOLO("yolo11n.pt") # choose your model, e.g., YOLO11 nano
# Train the model with your data and settings
model.train(data="data.yaml", epochs=100, imgsz=640)- Passaggio 4: Una volta completato l'addestramento, dovresti vedere un output simile a quello mostrato di seguito. Ciò significa che hai addestrato con successo il tuo modello YOLO11 per applicazioni basate su droni.
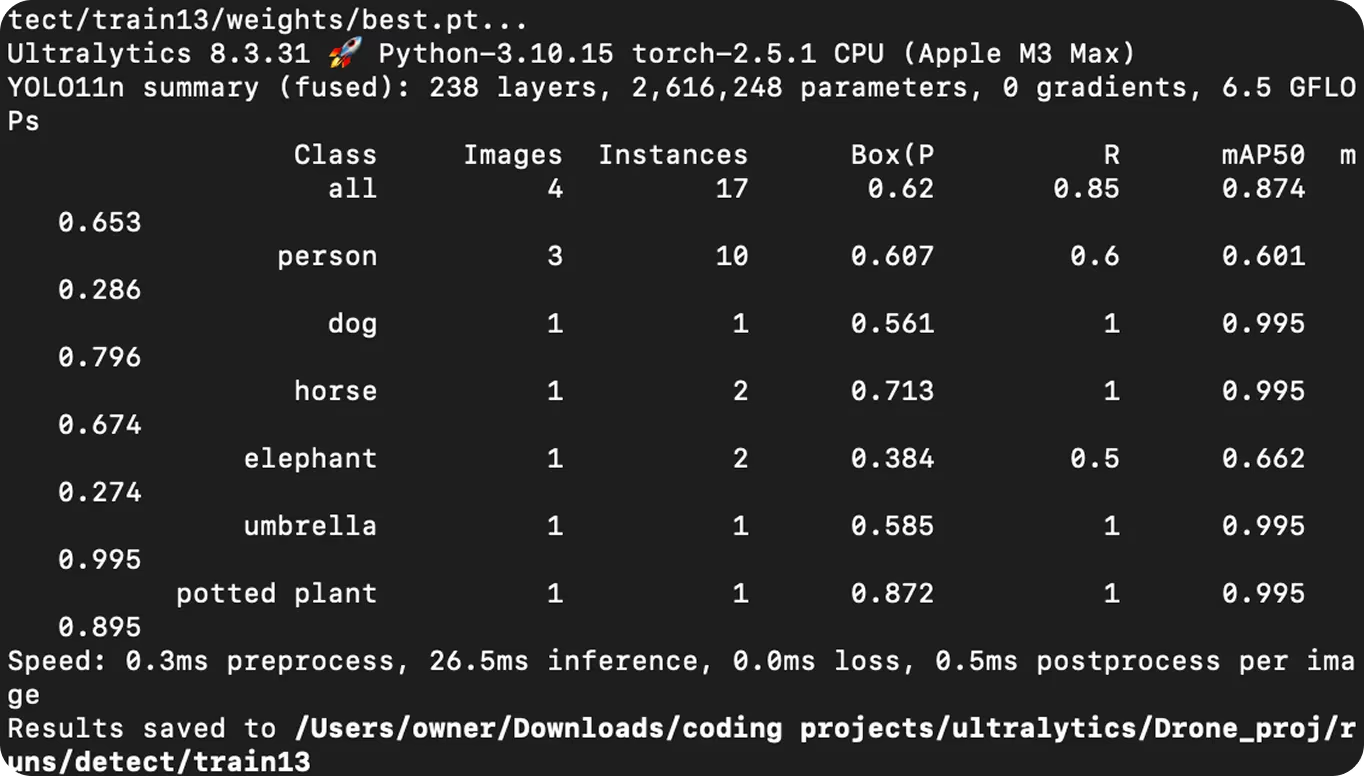
Fig 11. L'output mostrato dopo l'addestramento del modello.
Link to this sectionEseguire predizioni usando Ultralytics YOLO11 sui droni#
Il modello YOLO11 addestrato può ora essere utilizzato per fare predizioni attraverso un processo chiamato inferenza. L'inferenza consiste nell'utilizzare un modello per analizzare dati nuovi e mai visti basandosi su ciò che ha imparato durante l'addestramento. In questo caso, il modello può essere usato per trovare ed etichettare oggetti specifici, come case, in immagini o video disegnando riquadri di delimitazione (bounding boxes) attorno ad essi.
Per eseguire una predizione, puoi usare il modello YOLO11 addestrato su un video in input usando il seguente codice Python. In questo esempio, useremo lo stesso video artificiale da drone utilizzato per l'addestramento, ma puoi usare qualsiasi altro file video se preferisci.
# Import library
from ultralytics import YOLO
# Load the YOLO model
model = YOLO("best.pt") # Choose your custom-trained model
# Predict the results from the model
results = model.predict(source="path/to/original/video.mp4", show=True, save=True)Dopo aver eseguito questo codice, verrà salvato il file video di output con le predizioni e i riquadri di delimitazione.
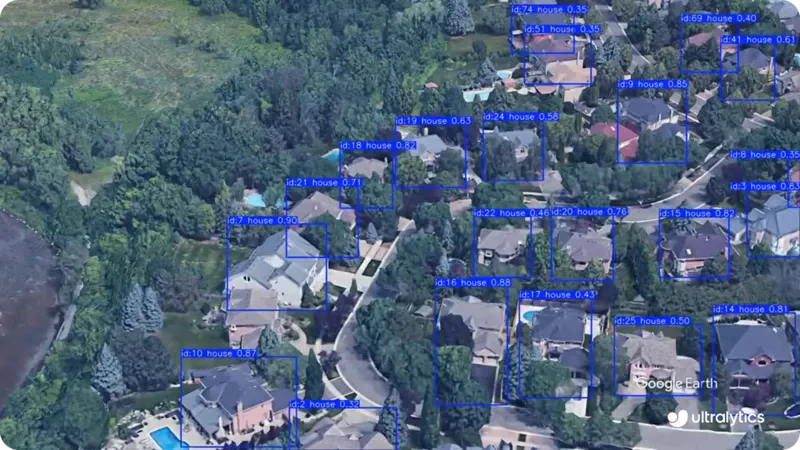
Fig 12. Un fotogramma dal file video di output.
Link to this sectionIntegrare Ultralytics YOLO11 sui droni per varie applicazioni#
Rilevare case per la consegna di pacchi tramite droni è solo un esempio di come la computer vision e YOLO11 possono essere applicati. Ecco alcuni altri utilizzi nel mondo reale della computer vision, di YOLO11 e dei droni aerei:
-
Sorveglianza e sicurezza: I droni con IA possono essere utilizzati per monitorare ampie aree in tempo reale. Possono rilevare intrusioni, tracciare attività sospette e migliorare la sicurezza ai confini nazionali così come durante grandi eventi pubblici.
-
Risposta ai disastri e ricerca e soccorso: Dotati di termocamere e rilevamento oggetti, i droni possono aiutare a localizzare i sopravvissuti in zone colpite da disastri. Possono anche valutare i danni e consegnare forniture di emergenza.
-
Agricoltura e agricoltura di precisione: I droni integrati con la computer vision possono essere utilizzati per analizzare la salute delle colture e rilevare malattie, aiutando gli agricoltori ad aumentare i raccolti riducendo i costi.
-
Mappatura e analisi geospaziale: Raccogliendo mappe 3D ad alta risoluzione, i droni con IA possono assistere nella pianificazione urbana e nei rilievi del territorio. Forniscono valutazioni del terreno più veloci e accurate rispetto ai metodi tradizionali.
Link to this sectionPunti chiave#
I droni con IA potenziati dalla computer vision stanno cambiando molti settori, dalla consegna di pacchi all'assistenza nelle emergenze e all'agricoltura. In questa guida, abbiamo visto come creare un video artificiale da drone, etichettare oggetti al suo interno, addestrare YOLO11 e usarlo per rilevare case.
Applicare il rilevamento oggetti ai filmati dei droni rende questi dispositivi più intelligenti, permettendo loro di riconoscere e tracciare oggetti automaticamente in tempo reale. Con il progredire della tecnologia, i droni guidati dall'IA giocheranno probabilmente un ruolo ancora maggiore nel rendere le consegne più veloci, migliorare la sicurezza e aiutare nella risposta ai disastri.
Unisciti alla nostra community ed esplora il nostro repository GitHub per saperne di più sulla vision AI, e dai un'occhiata alle nostre opzioni di licenza per dare il via ai tuoi progetti di computer vision. Ti interessano innovazioni come l'IA nella produzione o la computer vision nel settore automobilistico? Visita le nostre pagine dedicate alle soluzioni per scoprire di più.






