بناء تطبيقات الطائرات بدون طيار مدعومة بالذكاء الاصطناعي باستخدام Ultralytics YOLO11
تعرّف على كيفية بناء تطبيقات طائرات بدون طيار مدعومة بالذكاء الاصطناعي باستخدام Ultralytics YOLO11، مما يتيح اكتشاف الأشياء في الوقت الفعلي ومهام الرؤية الحاسوبية القائمة على الطائرات بدون طيار.

قد يبدو التسوق داخل المتاجر والتسوق عبر الإنترنت متشابهين، لكنهما يعتمدان على لوجستيات مختلفة. فالمتاجر تحتاج إلى إعادة ملء الأرفف، بينما تعتمد الطلبات عبر الإنترنت على التوصيل إلى عتبة الدار. وبفضل التطورات التكنولوجية، يجري إعادة تشكيل تجارب التسوق هذه بالتوازي.
على سبيل المثال، يحدث تحول كبير في عمليات التوصيل. تعمل الطائرات بدون طيار المدعومة بالذكاء الاصطناعي على تغيير كيفية وصول المنتجات إلى منازلنا. من المتوقع أن تتعامل هذه الطائرات الذكية مع حوالي 808 مليون عملية توصيل في العقد المقبل، مما يجعل السماء أحدث مسار توصيل للتجارة اليومية.
تستخدم طائرات التوصيل بدون طيار الذكاء الاصطناعي (AI) والرؤية الحاسوبية، وهو مجال فرعي من الذكاء الاصطناعي يُستخدم لتحليل البيانات المرئية، للتنقل والمناورة حول العقبات. يمكن لنماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 مساعدة الطائرات بدون طيار في اكتشاف الكائنات وتتبعها في الوقت الفعلي، مما يسمح لها بفهم بيئتها والتفاعل معها بشكل أفضل.

شكل 1. طائرة توصيل بدون طيار تنقل طرداً إلى وجهتها.
تقوم شركات مثل Meituan وDJI بالفعل بدمج الرؤية الحاسوبية في طائراتها بدون طيار. في الواقع، مهد التبني السريع للطائرات بدون طيار في مختلف الصناعات الطريق أمام سوق طائرات الدرون التي تعمل بالذكاء الاصطناعي للوصول إلى 206.9 مليار دولار بحلول عام 2031.
في هذه المقالة، سنلقي نظرة فاحصة على كيفية استخدام نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 في التطبيقات القائمة على الطائرات بدون طيار مثل توصيل الطلبات. سنستعرض مثالاً يوضح كيفية تطوير هذه التقنيات واختبارها قبل استخدامها في سيناريوهات العالم الحقيقي.
Link to this sectionاستخدام Ultralytics YOLO11 على الطائرات بدون طيار لاكتشاف المنازل#
يتمثل جزء أساسي من طائرات التوصيل بدون طيار في قدرتها على اكتشاف المنازل أثناء تنقلها. لإعادة إنشاء هذه القدرة وفهم كيفية عملها، سنقوم بتدريب نموذج رؤية حاسوبية يمكنه تحديد المنازل في لقطات التقطتها طائرة بدون طيار. سنقوم بـ تدريب مخصص لنموذج YOLO11 لهذا الغرض، والذي يتضمن ضبط نموذج YOLO11 مدرب مسبقاً للتعرف على المنازل واكتشافها باستخدام أمثلة مصنفة.
للقيام بذلك، سنحتاج إلى بيانات فيديو عالية الجودة من طائرة بدون طيار. ومن المثير للاهتمام أنه حتى بدون الوصول إلى طائرة بدون طيار حقيقية، لا يزال بإمكاننا إنشاء لقطات جوية واقعية. دعونا نلقي نظرة على كيفية القيام بذلك.
Link to this sectionإنشاء لقطة طائرة بدون طيار اصطناعية باستخدام Google Earth Studio#
Google Earth Studio هي أداة رسوم متحركة تعتمد على الويب يمكن للمستخدمين استخدامها لإنشاء محتوى ثابت ومتحرك باستخدام صور الأقمار الصناعية والصور ثلاثية الأبعاد من Google Earth. يمكننا استخدامها لإنشاء لقطات جوية واقعية.
الخطوة الأولى هي فتح Google Earth Studio وإنشاء مشروع، كما هو موضح أدناه.
ستحتاج إلى حساب Google لتسجيل الدخول.
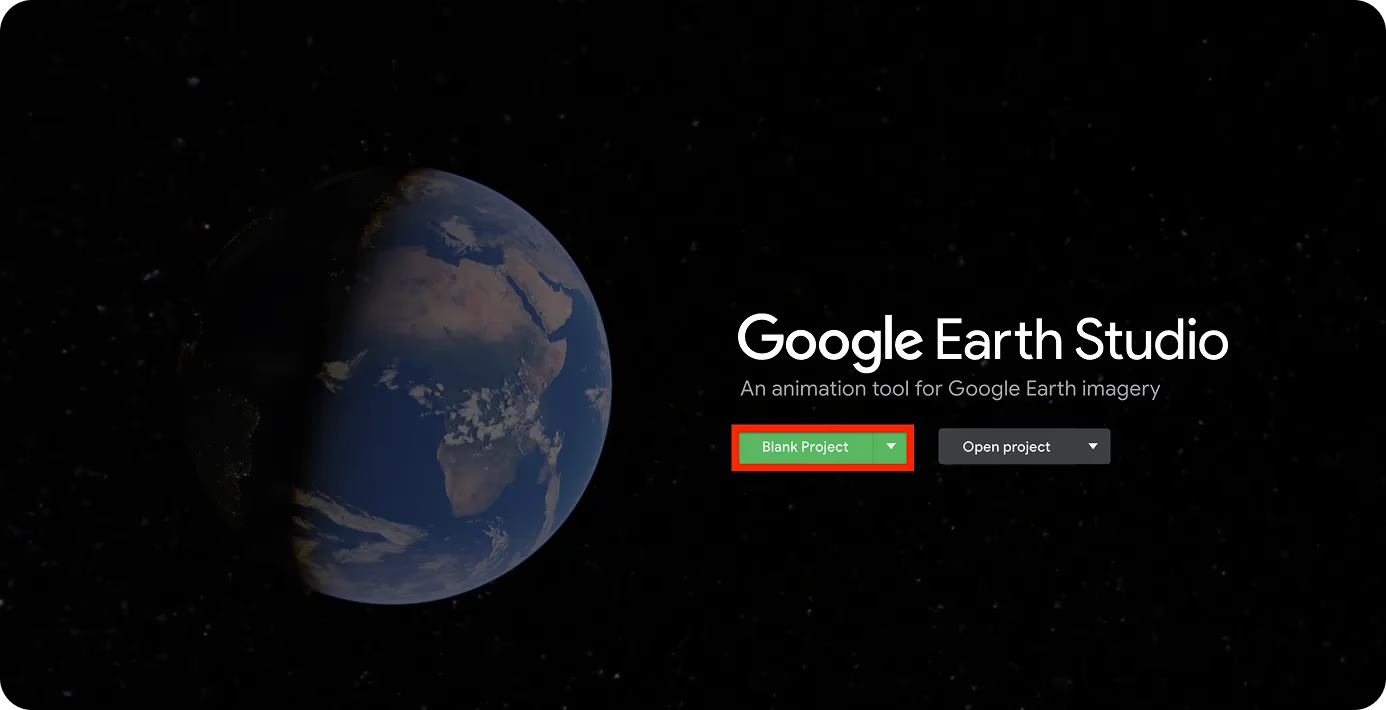
شكل 2. إنشاء مشروع على Google Earth Studio.
بمجرد تسجيل الدخول، يمكنك اختيار موقع لفيديو الطائرة بدون طيار الاصطناعي الخاص بك. باستخدام شريط البحث في الزاوية العلوية اليسرى من الصفحة، يمكنك البحث عن المواقع. لهذا البرنامج التعليمي، سنختار كندا. أيضاً، نظراً لأننا سنقوم بتدريب نموذج لاكتشاف المنازل، يجب أن يحتوي فيديو الطائرة بدون طيار الخاص بنا على منظر جوي للمنازل.
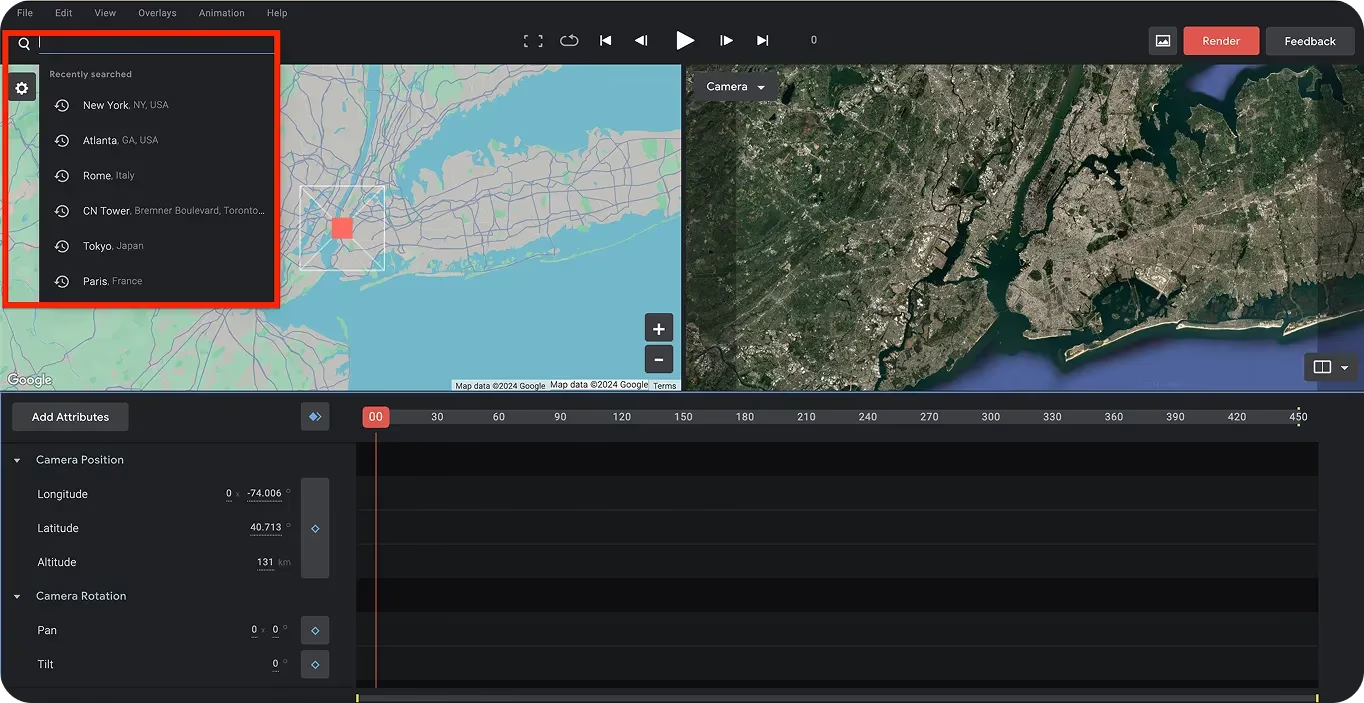
شكل 3. اختيار موقع باستخدام Google Earth Studio.
بعد ذلك، يمكننا تعيين الإطارات الزمنية الأولى والأخيرة لالتقاط حركة لقطة الطائرة بدون طيار الاصطناعية. بمجرد اختيار موقع البداية للقطة، قم بتعيين الإطار الأول باستخدام المعينات الزرقاء، كما هو موضح أدناه.
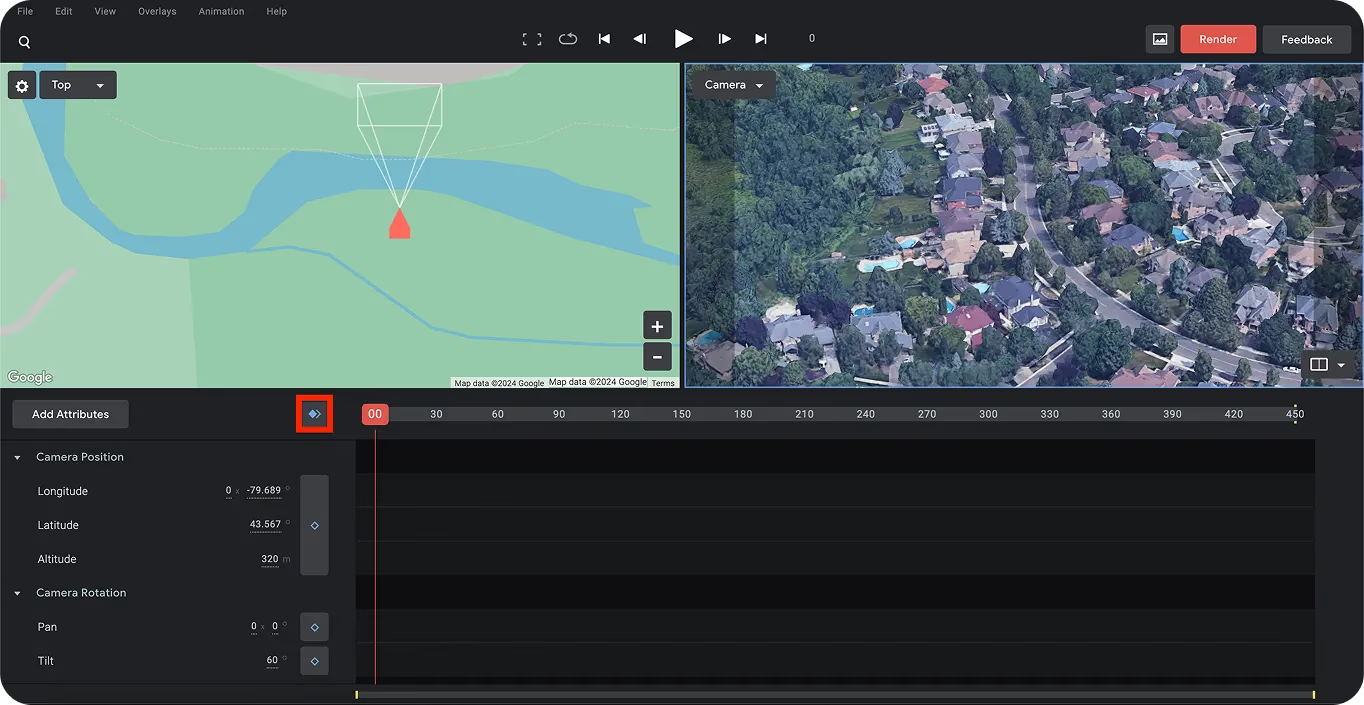
شكل 4. تعيين الإطار الأول باستخدام المعينات الزرقاء.
بعد ذلك، يمكننا اختيار الإطار الأخير لتحديد وجهة الطائرة بدون طيار. سيساعدنا هذا في إنشاء تأثير حركي للقطات الطائرة بدون طيار. للقيام بذلك، اسحب الشريط (المظلل أدناه) إلى اليمين إلى وقت محدد من أجل إنشاء تأثير الحركة للقطة. مرة أخرى، استخدم المعينات الزرقاء لتعيين النقطة الأخيرة.
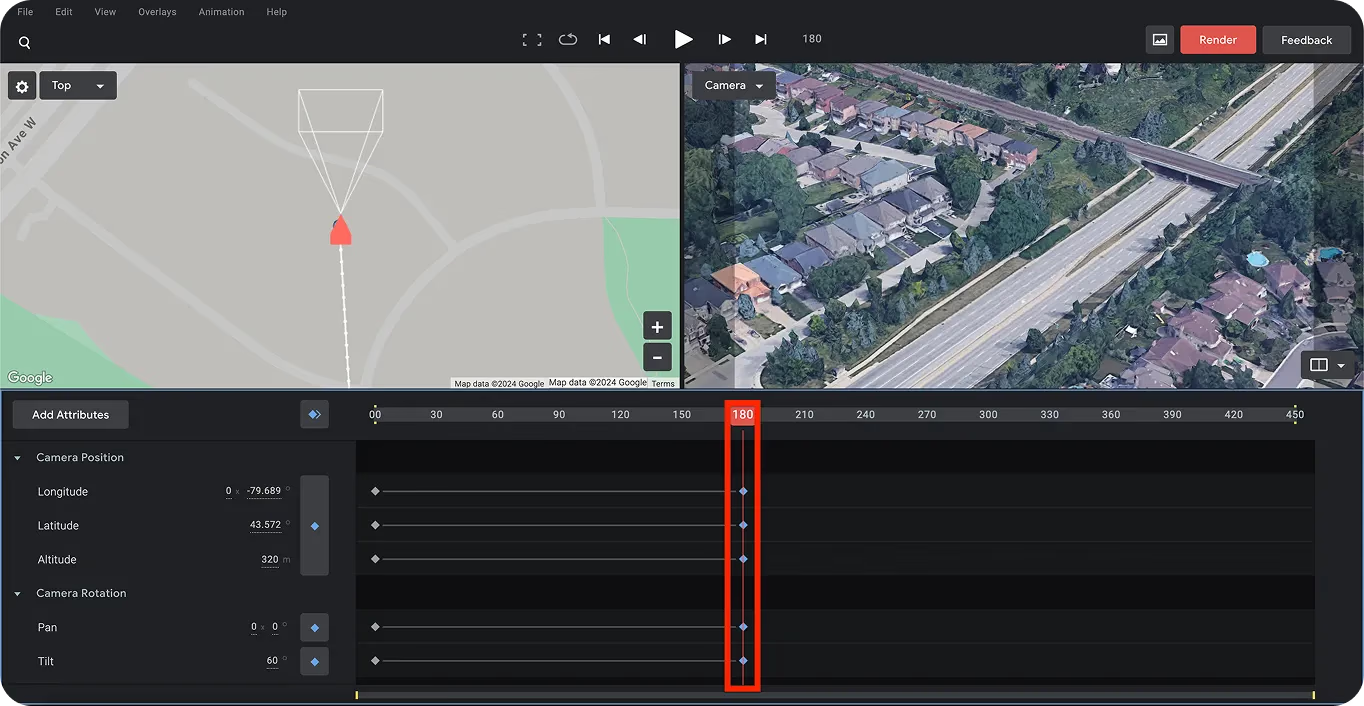
شكل 5. تعيين الإطار الأخير عن طريق تحريك الشريط.
أخيراً، يمكنك حفظ هذا المشروع وتصييره (Render) بالضغط على زر "Render" الأحمر في الزاوية العلوية اليمنى من الصفحة. سيعطيك هذا إخراج الفيديو النهائي للقطة الطائرة بدون طيار، مما ينشئ لقطات فيديو اصطناعية ناجحة.
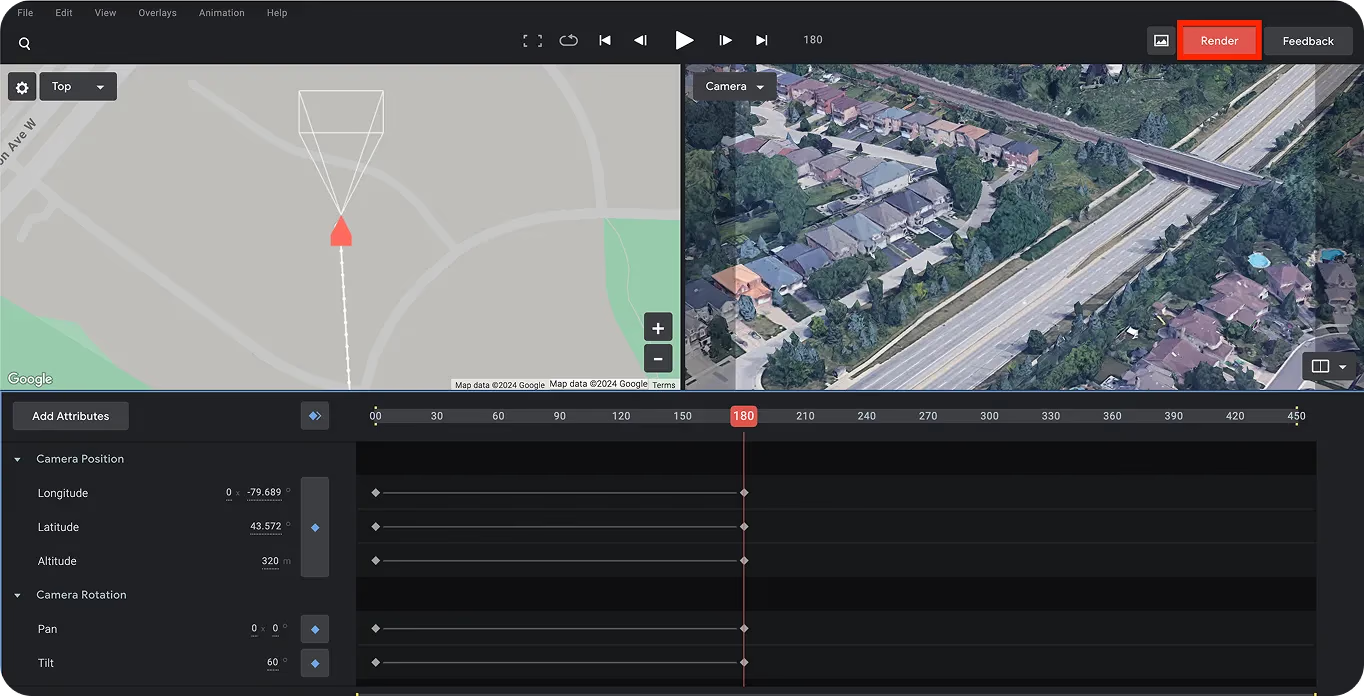
شكل 6. تصيير فيديو الإخراج النهائي.
Link to this sectionكيفية تصنيف بيانات الطائرة بدون طيار؟#
الآن بعد أن قمنا بإنشاء لقطات فيديو اصطناعية، الخطوة التالية هي تصنيف أو التعليق على المنازل الموجودة فيه. سنحتاج أيضاً إلى فصل الإطارات الفردية للفيديو.
للبدء في ذلك، سنقوم بتثبيت LabelImg. LabelImg هي أداة مفتوحة المصدر لتصنيف الصور. يمكنك تثبيتها مباشرة من الجهاز باستخدام مثبت الحزم pip عن طريق تشغيل الأمر التالي: "pip install labelImg".
بعد التثبيت، يمكنك تشغيل الأداة باستخدام الأمر ‘labelImg’ على جهازك أو موجه الأوامر. سيؤدي هذا إلى نقلك إلى الصفحة الموضحة أدناه.
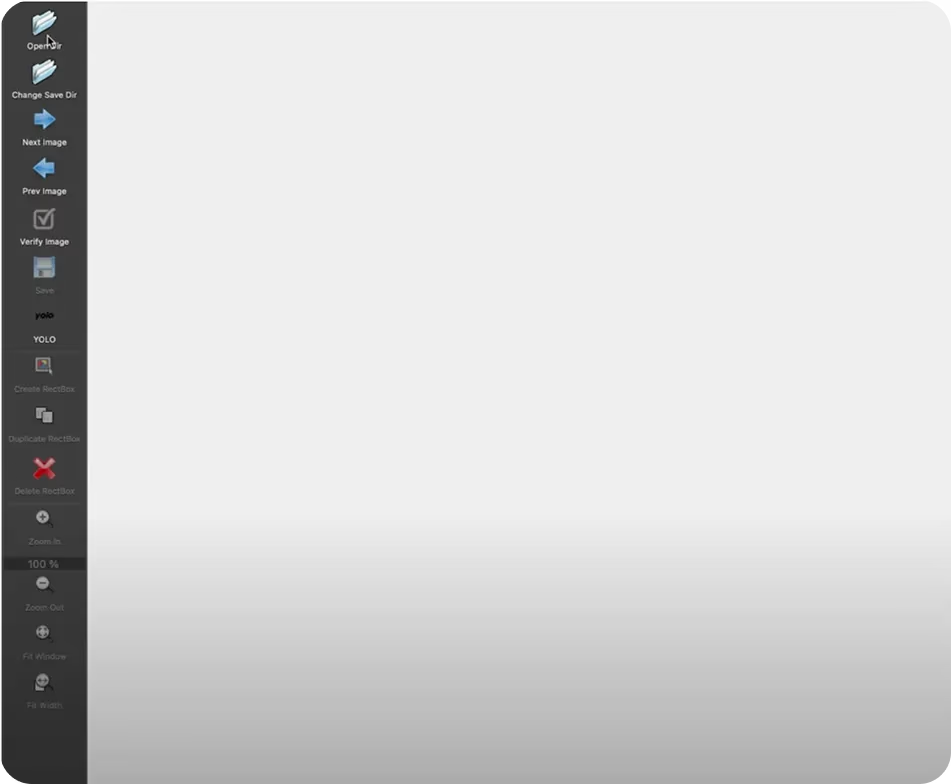
شكل 7. واجهة أداة LabelImg.
وفي الوقت نفسه، يمكننا إما استخدام محول فيديو إلى صور عبر الإنترنت أو أداة تسمى FFmpeg لتقسيم الفيديو إلى إطارات. FFmpeg عبارة عن مجموعة من المكتبات والأدوات لمعالجة محتوى الوسائط المتعددة مثل الصوت والفيديو والترجمة والبيانات الوصفية ذات الصلة.
يمكنك استخدام أمر الجهاز التالي لفصل كل إطار من فيديو لقطات الطائرة بدون طيار:
ffmpeg -i input_video.mp4 frame_%04d.pngبمجرد فصل إطارات لقطات الطائرة بدون طيار، يمكننا البدء في تصنيف الكائنات (المنازل) الموجودة فيها. من خلال الانتقال إلى مجلد الصور عبر أداة LabelImg، يمكننا تصنيف الكائنات في كل صورة. تأكد من حفظ كل صورة مصنفة والتحقق منها. بعد التعليق على الصور، يمكننا الآن الانتقال إلى تدريب YOLO11 باستخدام هذه البيانات.
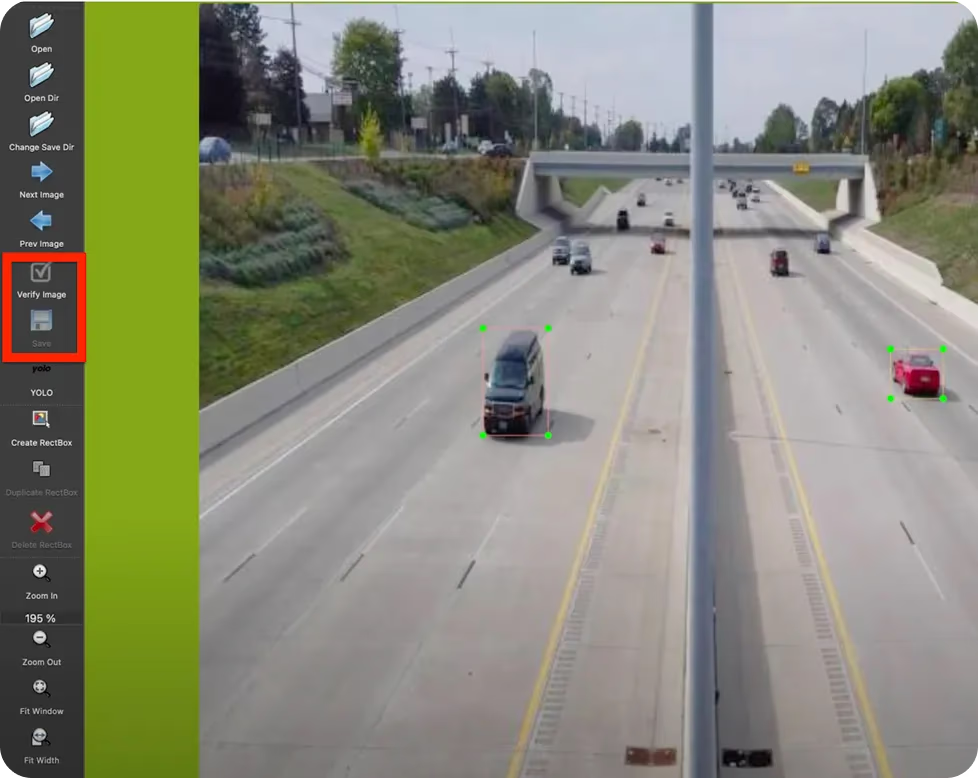
شكل 8. مثال على حفظ الصور المعلق عليها.
Link to this sectionسير عمل تدريب نموذج YOLO11#
قبل أن نبدأ في تدريب YOLO11، سنقوم بتنظيم صورنا وتصنيفاتنا. ابدأ بإنشاء مجلدين: أحدهما يسمى "train" والآخر "valid". قسّم صورك بين هذه المجلدات. داخل كل منهما، أنشئ مجلدات فرعية منفصلة للصور وملفات التصنيف المقابلة لها (بتنسيق نصي)، كما هو موضح أدناه.
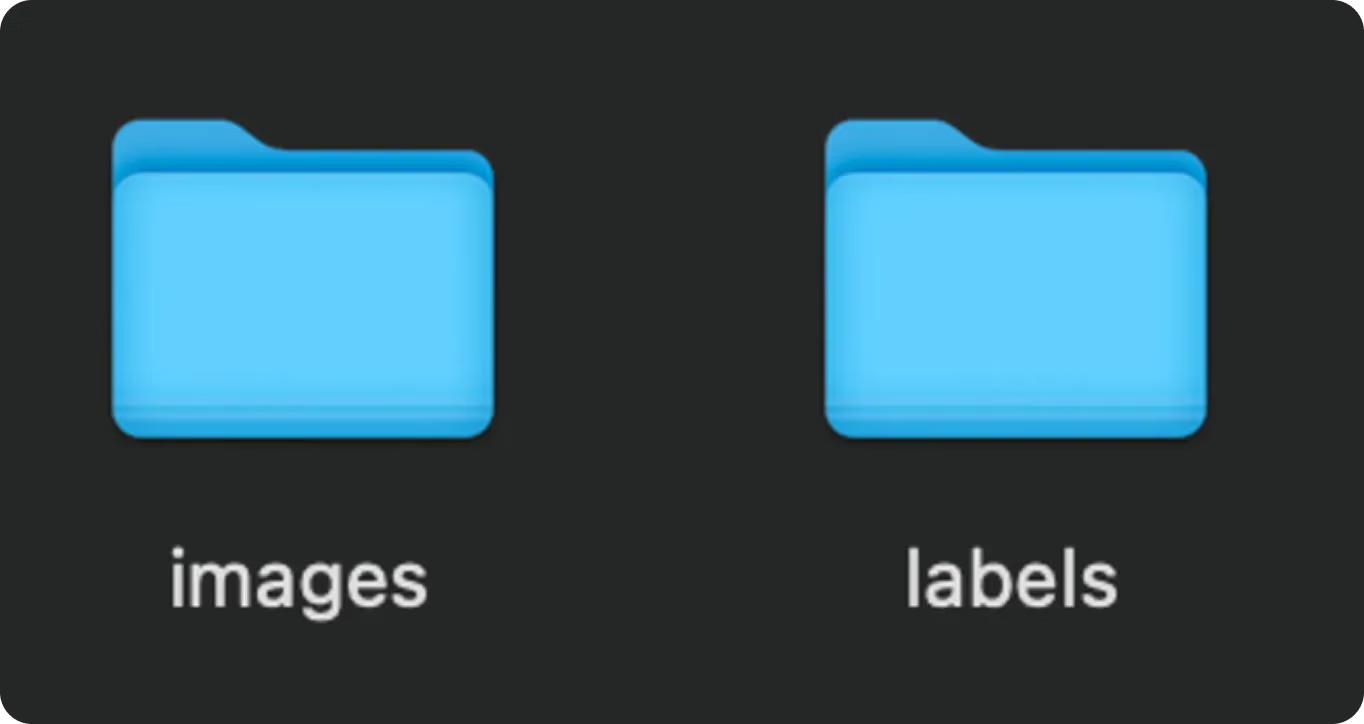
شكل 9. مثال على إنشاء مجلدات الصور والتصنيف.
بعد ذلك، يمكننا بدء تدريب نموذج YOLO11 على النحو التالي:
- الخطوة 1: تثبيت حزمة Ultralytics Python. يمكنك القيام بذلك عن طريق تشغيل الأمر "pip install ultralytics" في جهازك. إذا واجهت أي مشكلات في التثبيت، تحقق من دليل استكشاف الأخطاء وإصلاحها الخاص بنا للحصول على نصائح وحيل لمساعدتك في حلها.
- الخطوة 2: بعد تثبيت الحزمة بنجاح، أنشئ ملفاً باسم ‘data.yaml’. هذا ملف تكوين ضروري لتدريب النموذج. في ملف data.yaml، قم بتضمين المعلومات التالية: مسار مجموعة بيانات التدريب، ومسار مجموعة بيانات التحقق، وعدد الفئات (nc)، وقائمة بأسماء الفئات (names)، كما هو موضح أدناه.

شكل 10. مثال على ملف data.yaml.
- الخطوة 3: بمجرد تكوين ملف ‘data.yaml’، يمكنك بدء تدريب نموذجك باستخدام كود Python التالي. يقوم هذا الكود بتحميل نموذج YOLO11 المدرب مسبقاً وتدريبه وفقاً لتكويناتك.
from ultralytics import YOLO
# Load a YOLO11 model
model = YOLO("yolo11n.pt") # choose your model, e.g., YOLO11 nano
# Train the model with your data and settings
model.train(data="data.yaml", epochs=100, imgsz=640)- الخطوة 4: بمجرد اكتمال التدريب، يجب أن ترى مخرجات مشابهة لتلك الموضحة أدناه. هذا يعني أنك قمت بنجاح بتدريب نموذج YOLO11 الخاص بك للتطبيقات القائمة على الطائرات بدون طيار.
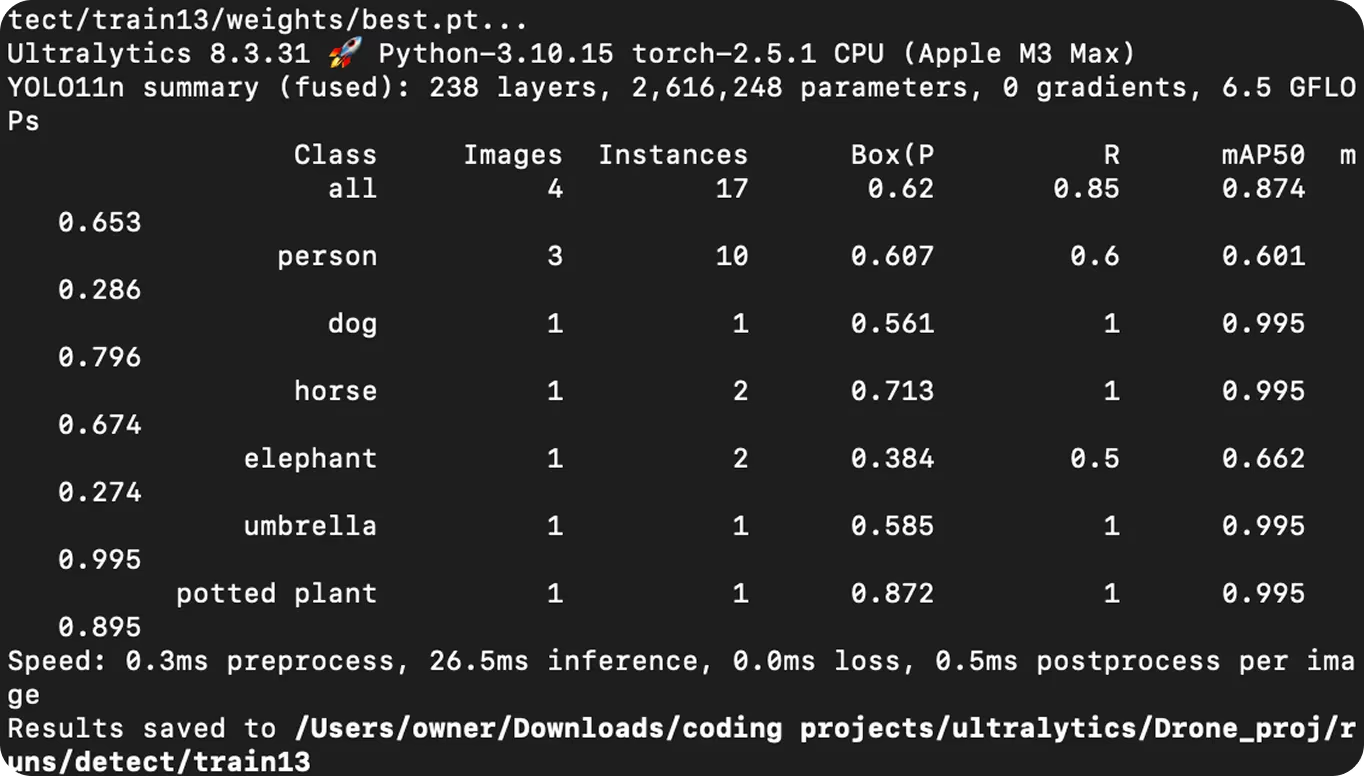
شكل 11. المخرجات التي تظهر بعد تدريب النموذج.
Link to this sectionتشغيل التنبؤات باستخدام Ultralytics YOLO11 على الطائرات بدون طيار#
يمكن الآن استخدام نموذج YOLO11 المدرب لإجراء تنبؤات من خلال عملية تسمى الاستدلال. يتضمن الاستدلال استخدام نموذج لتحليل بيانات جديدة غير مرئية بناءً على ما تعلمه أثناء التدريب. في هذه الحالة، يمكن استخدام النموذج للعثور على كائنات محددة، مثل المنازل، وتصنيفها في الصور أو مقاطع الفيديو عن طريق رسم مربعات إحاطة (bounding boxes) حولها.
لتشغيل تنبؤ، يمكنك استخدام نموذج YOLO11 المدرب على فيديو إدخال باستخدام كود Python التالي. في هذا المثال، سنستخدم نفس فيديو الطائرة بدون طيار الاصطناعي الذي تم استخدامه للتدريب، ولكن يمكنك استخدام أي ملف فيديو آخر إذا كنت تفضل ذلك.
# Import library
from ultralytics import YOLO
# Load the YOLO model
model = YOLO("best.pt") # Choose your custom-trained model
# Predict the results from the model
results = model.predict(source="path/to/original/video.mp4", show=True, save=True)بعد تشغيل هذا الكود، سيتم حفظ ملف الفيديو الناتج مع التنبؤات ومربعات الإحاطة.
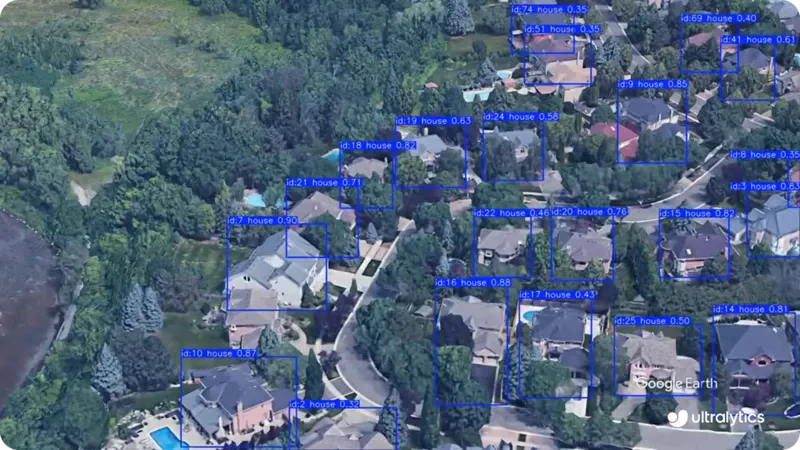
شكل 12. إطار من ملف الفيديو الناتج.
Link to this sectionدمج Ultralytics YOLO11 على الطائرات بدون طيار لتطبيقات مختلفة#
يعد اكتشاف المنازل لطرود توصيل الطائرات بدون طيار مجرد مثال واحد على كيفية تطبيق الرؤية الحاسوبية وYOLO11. فيما يلي بعض الاستخدامات الواقعية الأخرى للرؤية الحاسوبية وYOLO11 والطائرات بدون طيار الجوية:
-
المراقبة والأمن: يمكن استخدام طائرات الدرون التي تعمل بالذكاء الاصطناعي لمراقبة مساحات كبيرة في الوقت الفعلي. يمكنها اكتشاف التسلل وتتبع الأنشطة المشبوهة وتعزيز الأمن على الحدود الوطنية وكذلك في الأحداث العامة الكبيرة.
-
الاستجابة للكوارث والبحث والإنقاذ: مجهزة بكاميرات حرارية واكتشاف الكائنات، يمكن للطائرات بدون طيار المساعدة في تحديد مواقع الناجين في مناطق الكوارث. يمكنها أيضاً تقييم الأضرار وتسليم إمدادات الطوارئ.
-
الزراعة والزراعة الدقيقة: يمكن استخدام الطائرات بدون طيار المدمجة مع الرؤية الحاسوبية لتحليل صحة المحاصيل واكتشاف الأمراض، مما يساعد المزارعين على زيادة الإنتاجية مع تقليل التكاليف.
-
رسم الخرائط والتحليل الجغرافي المكاني: من خلال جمع خرائط ثلاثية الأبعاد عالية الدقة، يمكن للطائرات بدون طيار التي تعمل بالذكاء الاصطناعي المساعدة في التخطيط الحضري ومسوحات الأراضي. فهي توفر تقييمات تضاريس أسرع وأكثر دقة من الطرق التقليدية.
Link to this sectionأبرز النقاط#
تغير الطائرات بدون طيار المدعومة بالذكاء الاصطناعي والرؤية الحاسوبية العديد من الصناعات، بدءاً من توصيل الطرود ووصولاً إلى المساعدة في حالات الطوارئ والزراعة. في هذا الدليل، استعرضنا إنشاء فيديو اصطناعي لطائرة بدون طيار، وتصنيف الكائنات فيه، وتدريب YOLO11، واستخدامه لاكتشاف المنازل.
إن تطبيق اكتشاف الكائنات على لقطات الطائرات بدون طيار يجعل هذه الطائرات أكثر ذكاءً، مما يسمح لها بالتعرف على الكائنات وتتبعها تلقائياً في الوقت الفعلي. ومع تحسن التكنولوجيا، من المرجح أن تلعب الطائرات بدون طيار المدفوعة بالذكاء الاصطناعي دوراً أكبر في جعل عمليات التوصيل أسرع، وتحسين الأمن، والمساعدة في الاستجابة للكوارث.
انضم إلى مجتمعنا واستكشف مستودع GitHub الخاص بنا لمعرفة المزيد حول الرؤية الحاسوبية المعتمدة على الذكاء الاصطناعي، وتحقق من خيارات الترخيص الخاصة بنا لبدء مشاريع الرؤية الحاسوبية الخاصة بك. هل أنت مهتم بابتكارات مثل الذكاء الاصطناعي في التصنيع أو الرؤية الحاسوبية في صناعة السيارات؟ قم بزيارة صفحات الحلول الخاصة بنا لاكتشاف المزيد.






