Ultralytics YOLO11でAIを活用したドローンアプリケーションを構築しましょう
Ultralytics YOLO11を使用してAIを活用したドローンアプリケーションを構築する方法を学び、リアルタイムのオブジェクト検出やドローンベースのコンピュータビジョンタスクを可能にします。

店舗での買い物とオンラインショッピングは似ているように見えますが、それぞれ異なる物流に依存しています。店舗では棚の補充が必要ですが、オンライン注文は玄関先への配送に頼っています。技術の進歩により、両方のショッピング体験が並行して刷新されています。
例えば、配送の分野で大きな転換が起きています。AI搭載ドローンが製品を家庭に届ける方法を変えつつあります。これらのスマートドローンは今後10年間で約808 million deliveriesを処理すると予測されており、空が日々の商取引の新たな配送ルートになろうとしています。
配送ドローンは人工知能(AI)と、視覚データを分析するために使用されるAIのサブ分野であるcomputer visionを活用して、障害物を回避しながら移動します。Ultralytics YOLO11のようなコンピュータビジョンモデルは、ドローンがリアルタイムで物体を検出・追跡するのを助け、環境をより深く理解し対話できるようにします。

Fig 1。荷物を目的地へ運ぶ配送ドローン。
MeituanやDJIのような企業は、すでにコンピュータビジョンをドローンに統合しています。実際、様々な業界での急速なドローン採用により、AI drone marketは2031年までに2069億ドルまで急成長する見込みです。
本記事では、Ultralytics YOLO11のようなコンピュータビジョンモデルが、ドローン配送といったドローンベースのアプリケーションでどのように活用できるかを詳しく解説します。これらの技術を実際のシナリオで利用する前に、どのように開発・テストできるかを示す例を紹介します。
Link to this section住宅を検出するためにドローンでUltralytics YOLO11を使用する#
配送ドローンの重要な要素は、飛行中に住宅を検出する能力です。この機能を再現し仕組みを理解するために、空中ドローンで撮影された映像内の住宅を識別できるコンピュータビジョンモデルを学習させます。このためにYOLO11をcustom-trainします。これは、事前学習済みのYOLO11モデルをファインチューニングして、ラベル付けされたサンプルを使用して住宅を認識・検出できるようにするプロセスです。
そのためには、ドローンからの高品質なビデオデータが必要です。興味深いことに、本物のドローンがなくても、リアルな空中映像を作成することは可能です。その方法を見ていきましょう。
Link to this sectionGoogle Earth Studioを使って人工的なドローン映像を作成する#
Google Earth Studioは、Google Earthの衛星画像や3D画像を使用して静止画やアニメーションコンテンツを作成できるウェブベースのアニメーションツールです。これを使ってリアルな空中映像を作成できます。
最初のステップとしてGoogle Earth Studioを開き、以下のようにプロジェクトを作成します。
サインインするにはGoogleアカウントが必要です。
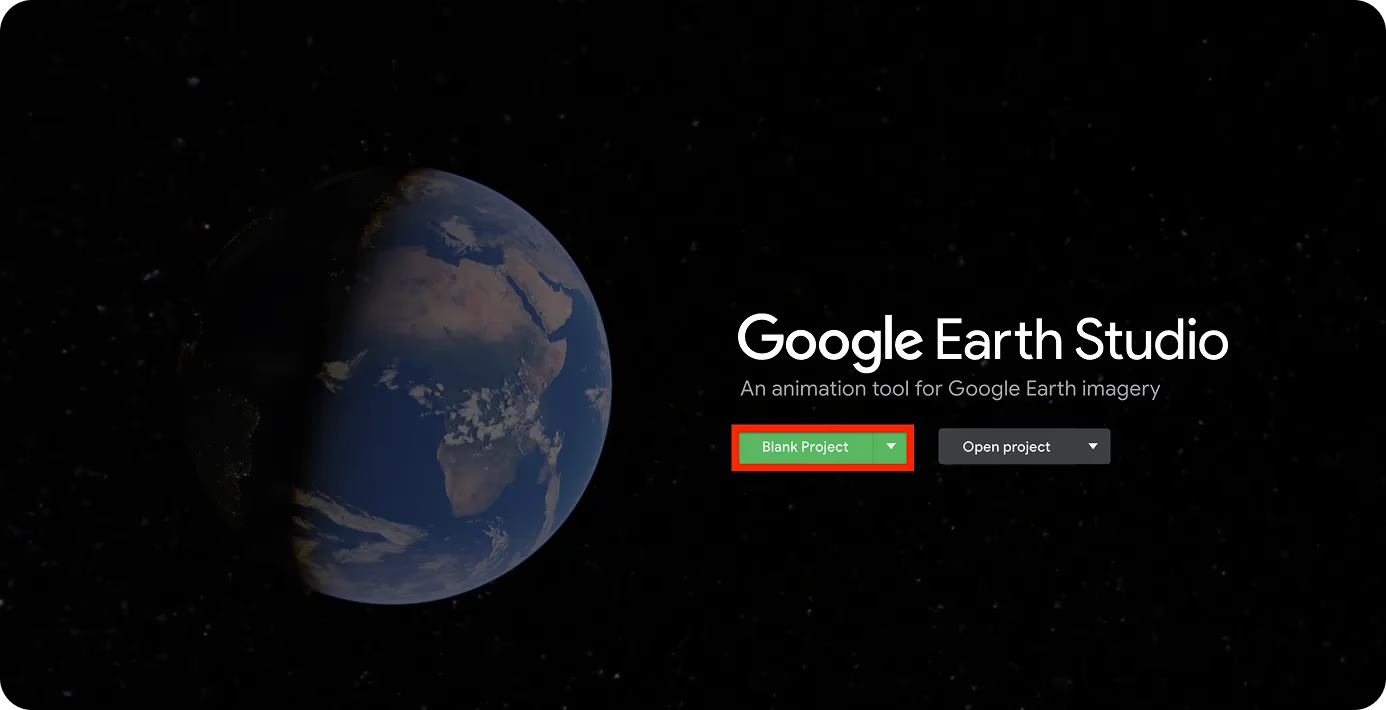
Fig 2. Google Earth Studioでプロジェクトを作成する。
サインインしたら、人工ドローンビデオの場所を選択します。ページ左上の検索バーを使って場所を検索できます。このチュートリアルではカナダを選択します。また、住宅を検出するモデルを学習させるため、ドローンビデオには住宅の航空写真が含まれている必要があります。
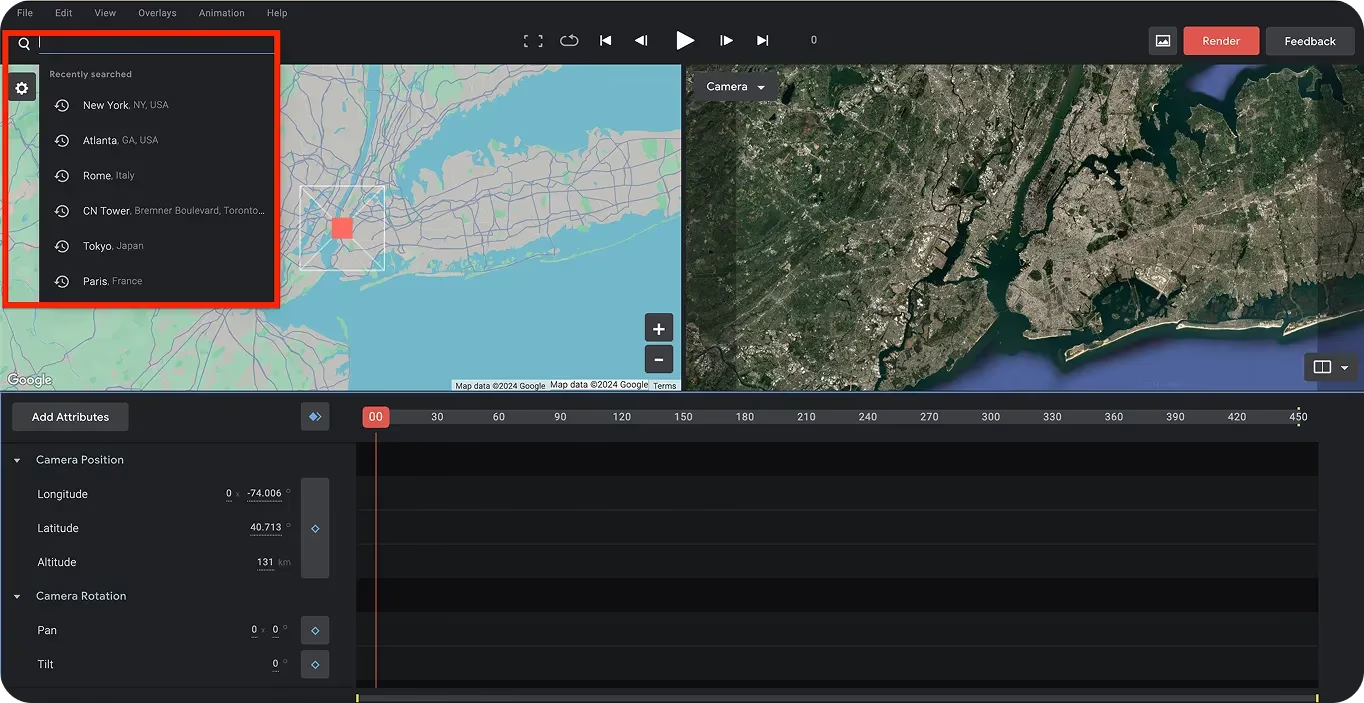
Fig 3. Google Earth Studioを使用して場所を選択する。
次に、最初と最後の時間フレームを設定して、人工ドローンショットの動きをキャプチャします。ドローンショットの開始位置を選択したら、以下に示すように青いひし形を使用して最初のフレームを設定します。
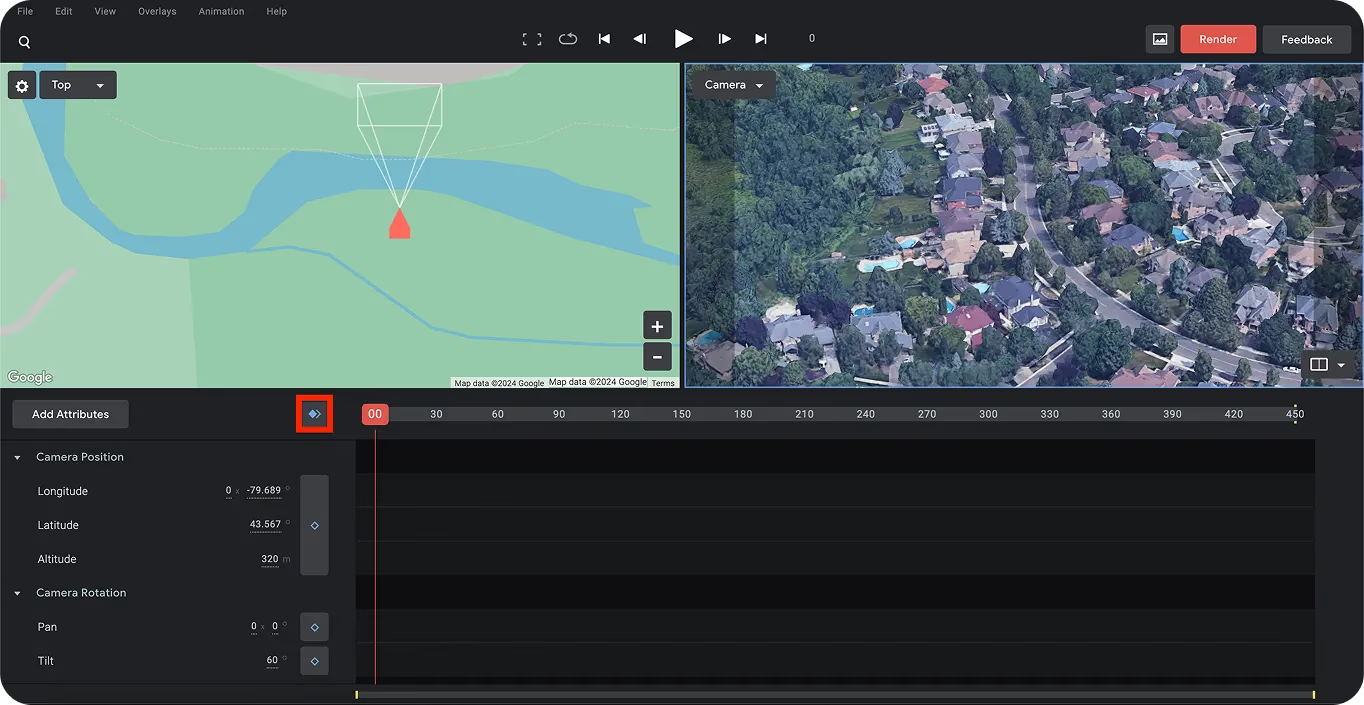
Fig 4. 青いひし形を使って最初のフレームを設定する。
次に、最後のフレームを選択してドローンの目的地を決定します。これにより、ドローン映像に動きの効果を作成できます。これを行うには、(以下で強調表示されている)バーを右側の特定の時間にスライドさせて、ドローンショットに動きの効果を与えます。もう一度、青いひし形を使用して終了ポイントを設定します。
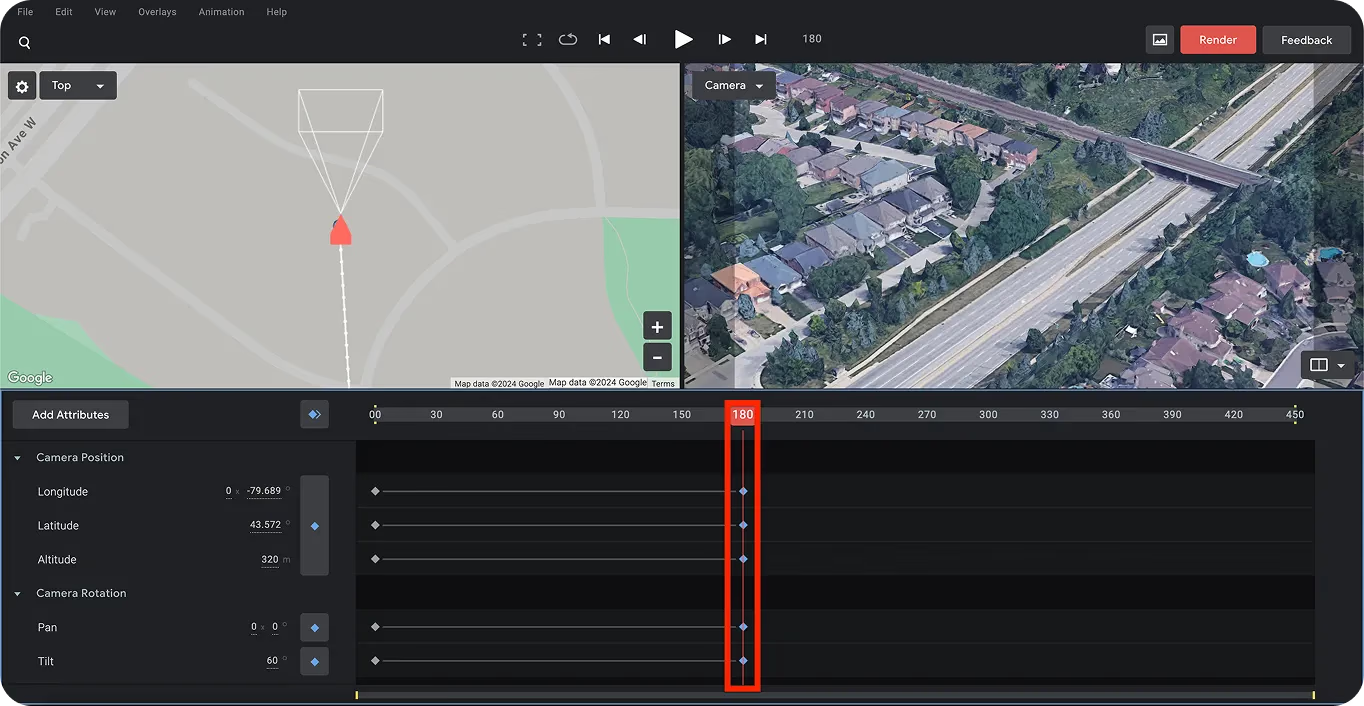
Fig 5. バーを動かして最後のフレームを設定する。
最後に、このプロジェクトを保存し、ページ右上の赤い「Render」ボタンをクリックしてレンダリングします。これにより、ドローンショットの最終的なビデオ出力が得られ、人工ドローンビデオ映像の作成が完了します。
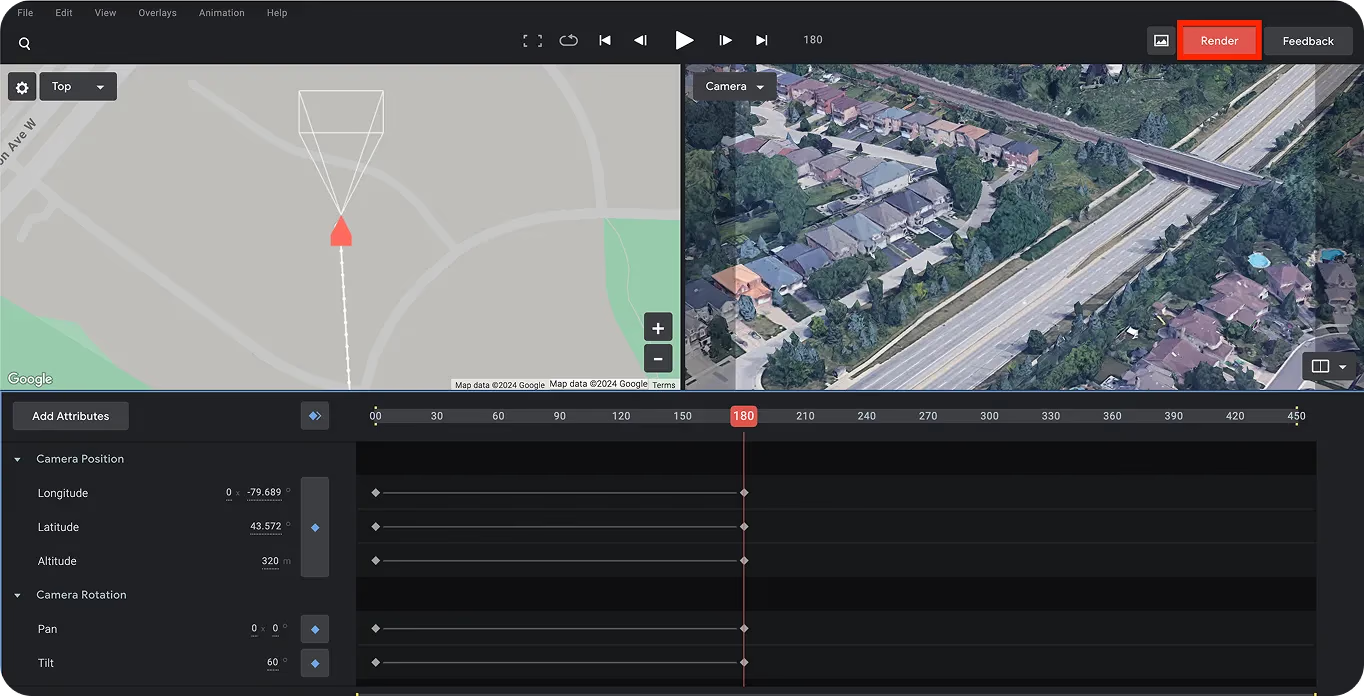
Fig 6. 最終出力ビデオをレンダリングする。
Link to this sectionドローンデータをラベル付けするには?#
人工ドローンビデオ映像が完成したところで、次のステップは映像内の住宅にlabel or annotateすることです。また、ビデオを個別のフレームに分割する必要があります。
始めるには、LabelImgをインストールします。LabelImgはオープンソースの画像ラベル付けツールです。ターミナルからpipパッケージインストーラーを使用して、以下のコマンドを実行することで直接インストールできます:「pip install labelImg」。
インストール後、ターミナルまたはコマンドプロンプトで「labelImg」コマンドを使用してツールを実行できます。これにより、下図のページが表示されます。
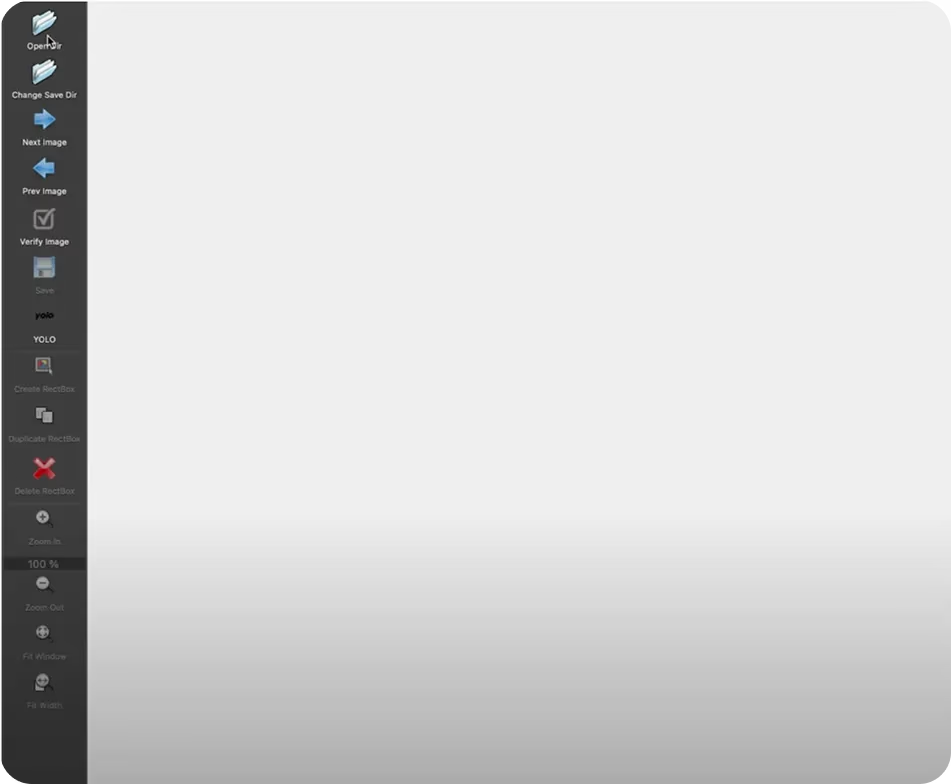
Fig 7. LabelImgツールのインターフェース。
その間に、オンラインのビデオから画像への変換ツールや、FFmpegというツールを使用してビデオをフレームに分割できます。FFmpegは、オーディオ、ビデオ、字幕、および関連するメタデータといったマルチメディアコンテンツを処理するためのライブラリとツールのコレクションです。
ドローン映像の各フレームを分離するには、以下のターミナルコマンドを使用できます:
ffmpeg -i input_video.mp4 frame_%04d.pngドローン映像のフレームを分離したら、それらに含まれる物体(住宅)のラベル付けを開始できます。LabelImgツールを使用して画像フォルダーに移動し、各画像の物体にラベルを付けます。ラベル付けした各画像を必ず保存し、検証してください。画像をアノテーションした後は、このデータを使ってYOLO11の学習に進むことができます。
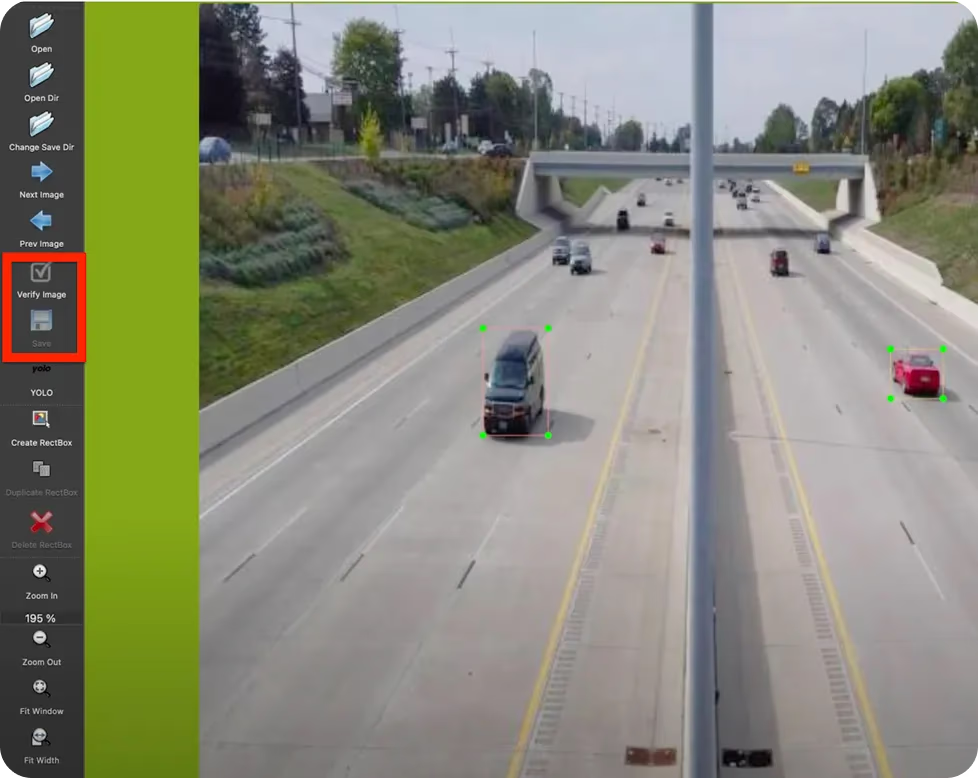
Fig 8. アノテーション済みの画像を保存する例。
Link to this sectionYOLO11モデル学習ワークフロー#
YOLO11の学習を開始する前に、画像とラベルを整理します。「train」と「valid」という名前の2つのフォルダーを作成し、これらのフォルダーに画像を分割して入れます。それぞれの中に、画像用と対応するラベルファイル(テキスト形式)用のサブフォルダーを以下のように個別に作成します。
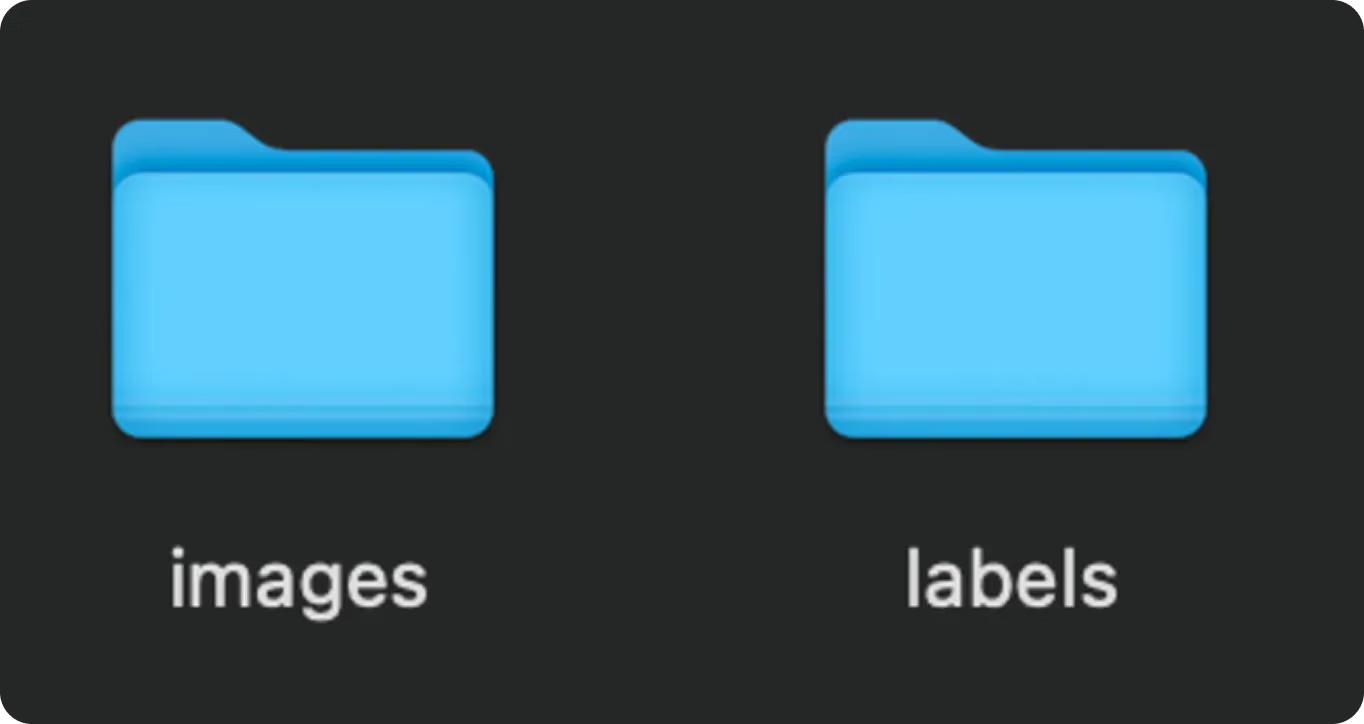
Fig 9. 画像フォルダーとラベルフォルダーを作成する例。
次に、以下のようにYOLO11モデルの学習を開始できます:
- ステップ 1: Ultralytics Pythonパッケージをインストールします。ターミナルで「pip install ultralytics」コマンドを実行してください。インストールで問題が発生した場合は、解決のヒントやコツが記載されたトラブルシューティングガイドを確認してください。
- ステップ 2: パッケージのインストールが完了したら、「data.yaml」という名前のファイルを作成します。これはモデルの学習に不可欠な設定ファイルです。data.yamlファイルには、トレーニングデータセットへのパス、検証データセットへのパス、クラス数(nc)、およびクラス名のリスト(names)を、以下のように含めます。

Fig 10. data.yamlファイルの例。
- ステップ 3: 「data.yaml」ファイルを設定したら、以下のPythonコードを使用してモデルの学習を開始できます。このコードは、事前学習済みのYOLO11モデルを読み込み、構成に従って学習させます。
from ultralytics import YOLO
# Load a YOLO11 model
model = YOLO("yolo11n.pt") # choose your model, e.g., YOLO11 nano
# Train the model with your data and settings
model.train(data="data.yaml", epochs=100, imgsz=640)- ステップ 4: 学習が完了すると、下図のような出力が表示されるはずです。これは、ドローンベースのアプリケーション向けにYOLO11モデルの学習が正常に完了したことを意味します。
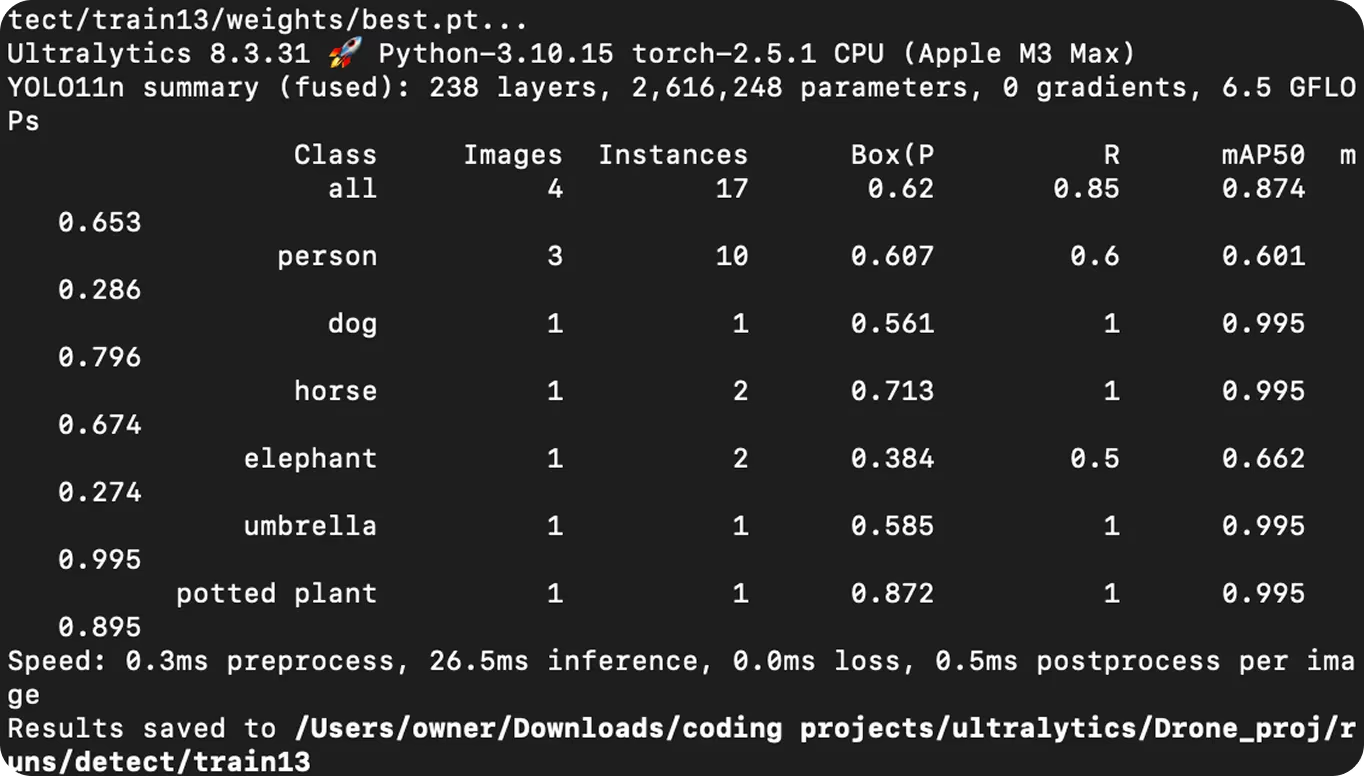
Fig 11. モデル学習後に表示される出力。
Link to this sectionドローンでUltralytics YOLO11を使用して予測を実行する#
学習済みのYOLO11モデルは、inferencingと呼ばれるプロセスを通じて予測を行うために使用できます。推論とは、学習中に得た知識に基づいて、未知の新しいデータを分析するためにモデルを使用することです。この場合、モデルを使用して、画像やビデオ内の住宅などの特定の物体を見つけ、その周囲にバウンディングボックスを描画してラベル付けすることができます。
予測を実行するには、以下のPythonコードを使用して、学習済みのYOLO11モデルを入力ビデオに適用します。この例では、学習に使用したのと同じ人工ドローンビデオを使用しますが、必要に応じて他のビデオファイルを使用することも可能です。
# Import library
from ultralytics import YOLO
# Load the YOLO model
model = YOLO("best.pt") # Choose your custom-trained model
# Predict the results from the model
results = model.predict(source="path/to/original/video.mp4", show=True, save=True)このコードを実行すると、予測とバウンディングボックスが付加された出力ビデオファイルが保存されます。
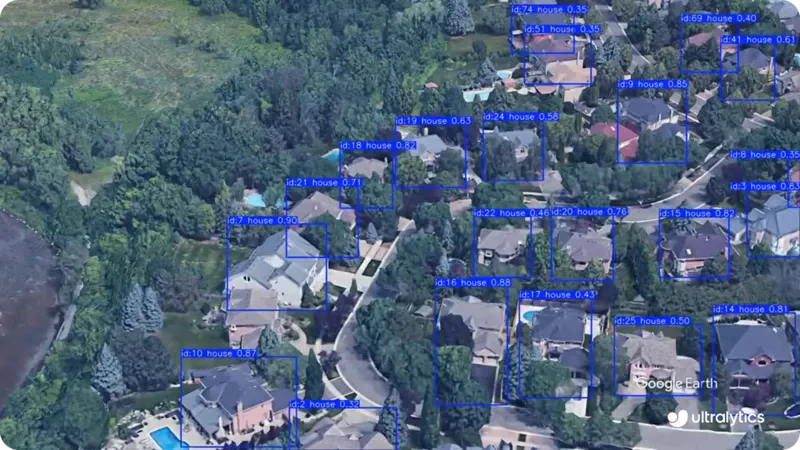
Fig 12. 出力ビデオファイルからのフレーム。
Link to this section様々なアプリケーションのためにドローンにUltralytics YOLO11を統合する#
ドローン配送パッケージのために住宅を検出することは、コンピュータビジョンとYOLO11がどのように応用できるかの一例に過ぎません。コンピュータビジョン、YOLO11、および空中ドローンのその他の現実世界の活用例をいくつか紹介します:
-
監視とセキュリティ: AI dronesは、広範囲をリアルタイムで監視するために使用できます。侵入者の検知、不審な行動の追跡、国境や大規模な公共イベントでのセキュリティ強化に貢献します。
-
災害対応と捜索救助: サーマルカメラと物体検出を備えたドローンは、災害地で生存者を見つけるのに役立ちます。また、被害状況の評価や緊急物資の配送も可能です。
-
農業と精密農業: コンピュータビジョンと統合されたドローンは、作物の健康状態を分析し病気を検出するために使用でき、農家が収穫量を増やしながらコストを削減するのに役立ちます。
-
マッピングと地理空間分析: 高解像度の3Dマップを収集することで、AIドローンは都市計画や土地測量を支援できます。従来の方法よりも迅速かつ正確な地形評価を提供します。
Link to this section重要なポイント#
コンピュータビジョンを搭載したAIドローンは、パッケージ配送から緊急支援、農業に至るまで、多くの業界を変革しています。本ガイドでは、人工ドローンビデオの作成、オブジェクトのラベル付け、YOLO11の学習、そしてそれを使用した住宅の検出について解説しました。
ドローン映像に物体検出を適用することで、ドローンはよりスマートになり、リアルタイムで自動的に物体を認識および追跡できるようになります。技術が向上するにつれ、AI駆動型ドローンは配送の高速化、セキュリティの向上、災害対応の支援において、さらに大きな役割を果たすようになるでしょう。
our communityに参加して、our GitHub repositoryでビジョンAIについて詳しく学び、our licensing optionsをチェックしてコンピュータビジョンプロジェクトを開始しましょう。AI in manufacturingやcomputer vision in the automotive業界におけるイノベーションに興味がありますか?当社のソリューションページにアクセスして、詳細をご覧ください。






