Crée des applications de drone alimentées par l'IA avec Ultralytics YOLO11
Apprends à créer des applications de drone alimentées par l'IA avec Ultralytics YOLO11, permettant la détection d'objets en temps réel et des tâches de vision par ordinateur basées sur les drones.

Le shopping en magasin et le shopping en ligne peuvent sembler similaires, mais ils reposent sur des logistiques différentes. Les magasins ont besoin de réapprovisionner leurs étagères, tandis que les commandes en ligne dépendent de livraisons à domicile. Grâce aux avancées technologiques, ces deux expériences d'achat sont transformées en parallèle.
Par exemple, un changement majeur s'opère dans le domaine de la livraison. Les drones dotés d'IA modifient la manière dont les produits arrivent chez nous. On s'attend à ce que ces drones intelligents gèrent environ 808 millions de livraisons au cours de la prochaine décennie, faisant du ciel la nouvelle voie de livraison du commerce quotidien.
Les drones de livraison utilisent l'intelligence artificielle (IA) et la vision par ordinateur, un sous-domaine de l'IA servant à analyser des données visuelles, pour naviguer et manœuvrer autour des obstacles. Les modèles de vision par ordinateur comme Ultralytics YOLO11 peuvent aider les drones à détecter et à suivre des objets en temps réel, leur permettant de mieux comprendre et interagir avec leur environnement.

Fig 1. Un drone de livraison transportant un colis vers sa destination.
Des entreprises comme Meituan et DJI intègrent déjà la vision par ordinateur dans leurs drones. En fait, l'adoption rapide des drones dans divers secteurs a permis au marché des drones IA d'atteindre une valeur de 206,9 milliards de dollars d'ici 2031.
Dans cet article, nous examinerons de plus près comment les modèles de vision par ordinateur comme Ultralytics YOLO11 peuvent être utilisés dans des applications basées sur des drones, telles que les livraisons par drone. Nous parcourrons un exemple qui montrera comment ces technologies peuvent être développées et testées avant d'être utilisées dans des scénarios réels.
Link to this sectionUtiliser Ultralytics YOLO11 sur des drones pour détecter des maisons#
Un élément clé des drones de livraison est leur capacité à détecter des maisons lors de leur navigation. Pour recréer cette capacité et comprendre son fonctionnement, nous allons entraîner un modèle de vision par ordinateur capable d'identifier des maisons dans des images capturées par un drone aérien. Nous allons entraîner de manière personnalisée YOLO11 pour cela, ce qui implique d'ajuster un modèle YOLO11 pré-entraîné pour reconnaître et détecter des maisons en utilisant des exemples étiquetés.
Pour ce faire, nous aurons besoin de données vidéo de haute qualité provenant d'un drone. Fait intéressant, même sans accès à un vrai drone, nous pouvons toujours générer des images aériennes réalistes. Voyons comment.
Link to this sectionCréer une prise de vue de drone artificielle avec Google Earth Studio#
Google Earth Studio est un outil d'animation basé sur le Web que tu peux utiliser pour créer du contenu fixe et animé à partir de l'imagerie satellite et 3D de Google Earth. Nous pouvons l'utiliser pour créer des images aériennes réalistes.
La première étape consiste à ouvrir Google Earth Studio et à créer un projet, comme indiqué ci-dessous.
Tu auras besoin d'un compte Google pour te connecter.
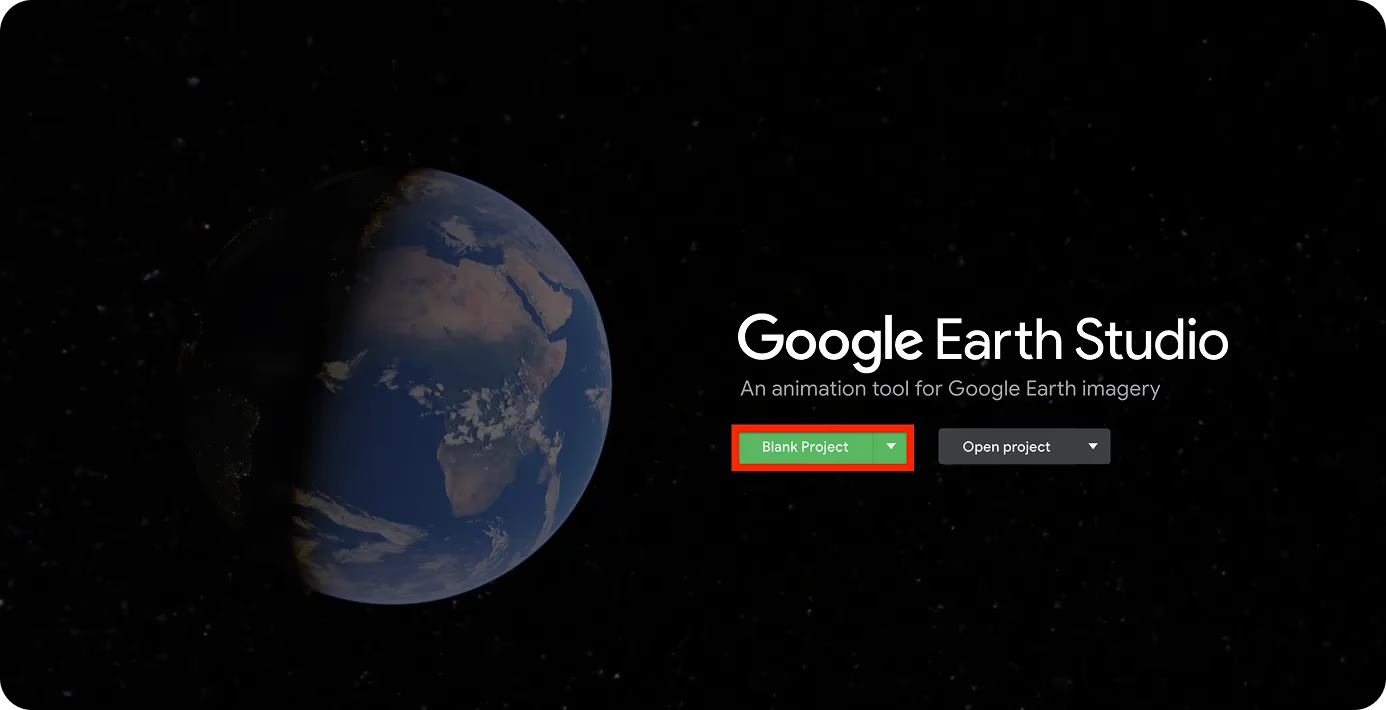
Fig 2. Création d'un projet sur Google Earth Studio.
Une fois connecté, tu peux choisir un emplacement pour ta vidéo de drone artificielle. En utilisant la barre de recherche en haut à gauche de la page, tu peux chercher des lieux. Pour ce tutoriel, nous choisirons le Canada. De plus, comme nous allons entraîner un modèle pour détecter des maisons, notre vidéo de drone doit présenter une vue aérienne de maisons.
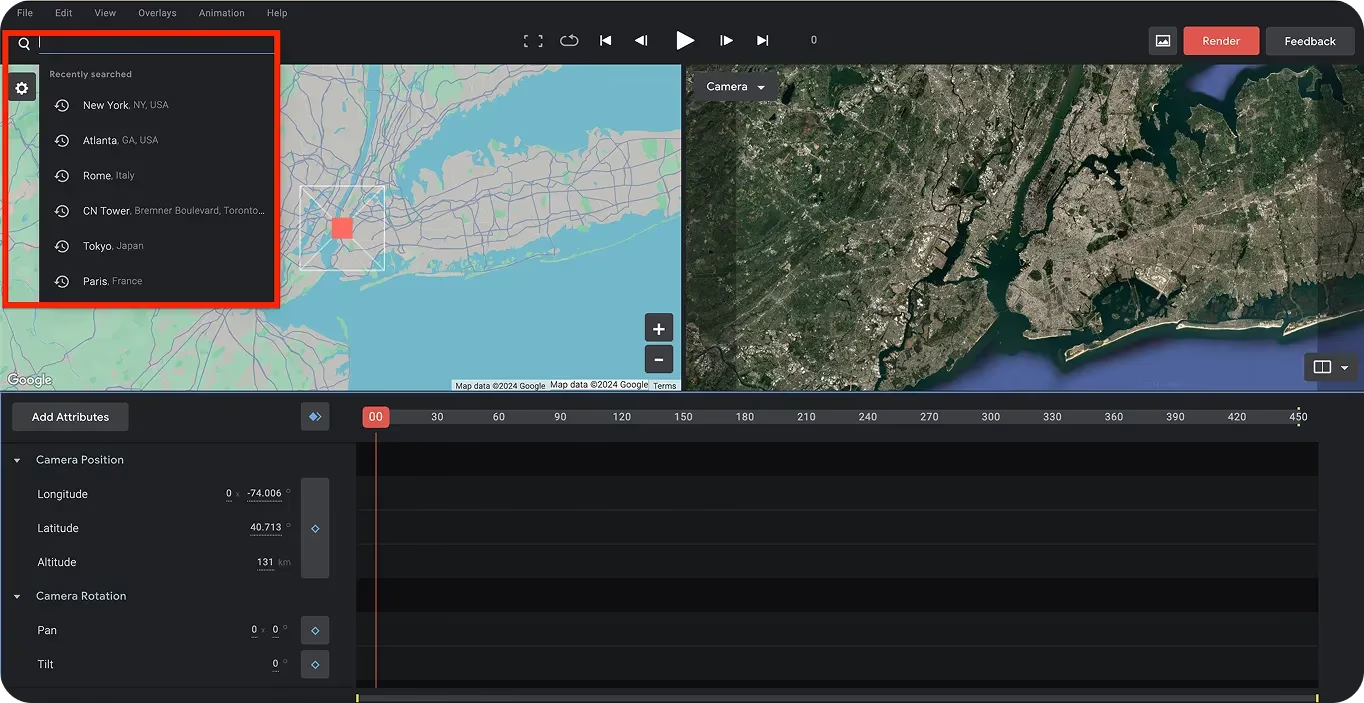
Fig 3. Choix d'un emplacement avec Google Earth Studio.
Ensuite, nous pouvons définir les première et dernière images clés pour capturer le mouvement de la prise de vue artificielle du drone. Une fois que tu as choisi l'emplacement de départ pour la prise de vue du drone, définis la première image à l'aide des losanges bleus, comme illustré ci-dessous.
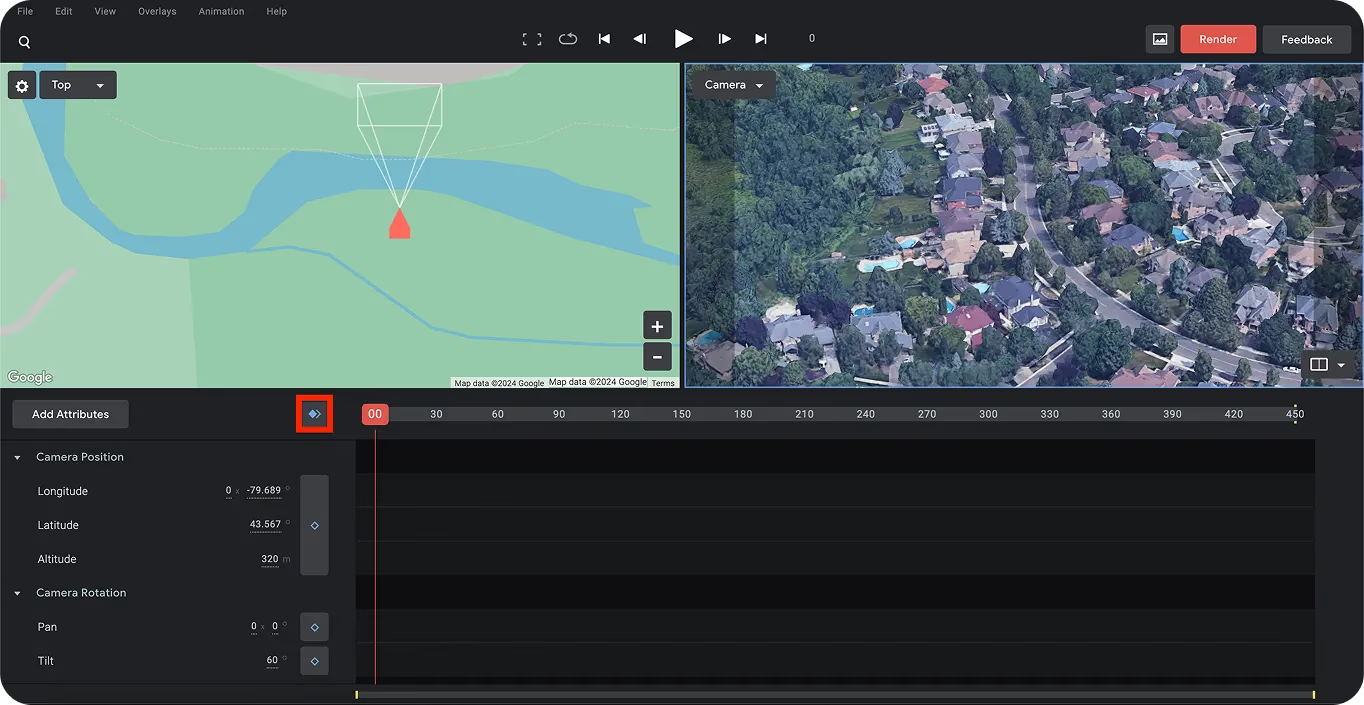
Fig 4. Définition de la première image à l'aide des losanges bleus.
Ensuite, nous pouvons choisir la dernière image pour déterminer la destination du drone. Cela nous aidera à créer un effet de mouvement pour les images du drone. Pour ce faire, fais glisser la barre (surlignée ci-dessous) vers la droite jusqu'à un moment précis afin de créer l'effet de mouvement pour la prise de vue du drone. Encore une fois, utilise les losanges bleus pour définir le point final.
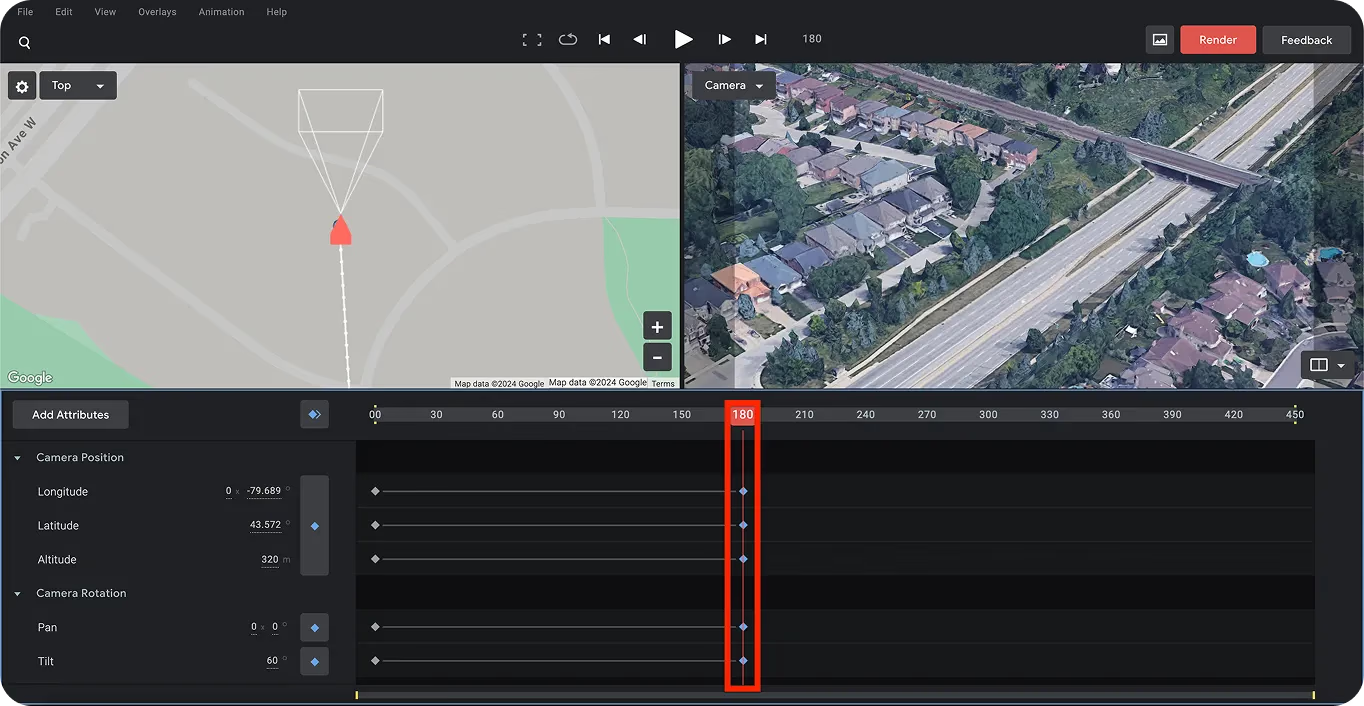
Fig 5. Définition de la dernière image en déplaçant la barre.
Enfin, tu peux enregistrer ce projet et le rendre en cliquant sur le bouton rouge « Render » en haut à droite de la page. Cela te donnera la vidéo finale de la prise de vue du drone, créant ainsi avec succès une séquence vidéo artificielle.
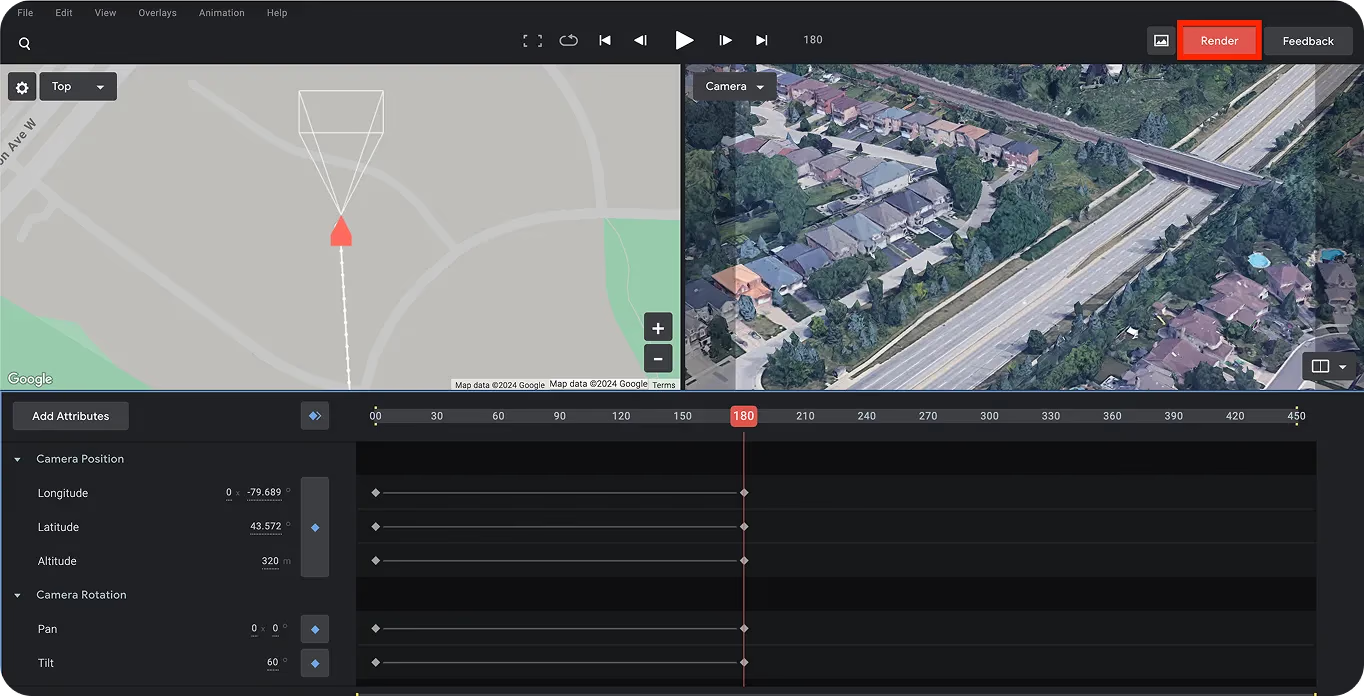
Fig 6. Rendu de la vidéo finale.
Link to this sectionComment étiqueter les données du drone ?#
Maintenant que nous avons créé des images vidéo de drone artificielles, l'étape suivante consiste à étiqueter ou annoter les maisons qu'elles contiennent. Nous devrons également séparer les différentes images de la vidéo.
Pour commencer, nous allons installer LabelImg. LabelImg est un outil d'étiquetage d'images open source. Tu peux l'installer directement depuis le terminal en utilisant le gestionnaire de paquets pip en exécutant la commande suivante : “pip install labelImg”.
Après l'installation, tu peux exécuter l'outil en utilisant la commande ‘labelImg’ dans ton terminal ou ton invite de commande. Cela t'amènera à la page ci-dessous.
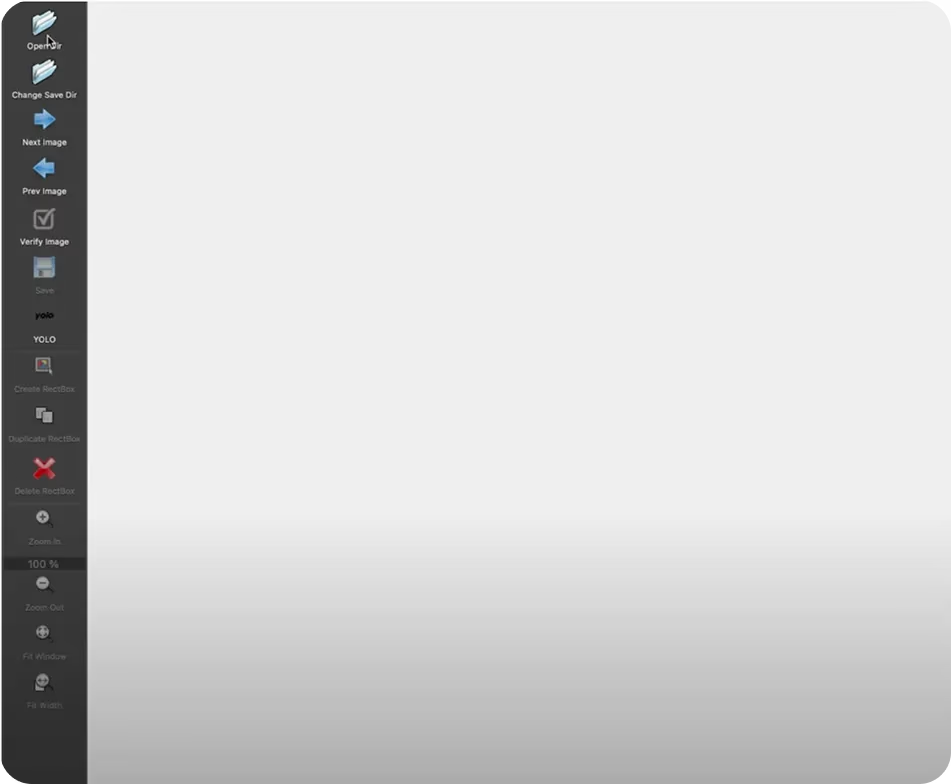
Fig 7. L'interface de l'outil LabelImg.
En attendant, nous pouvons soit utiliser un convertisseur vidéo-image en ligne, soit un outil appelé FFmpeg pour diviser la vidéo en images. FFmpeg est une collection de bibliothèques et d'outils pour traiter le contenu multimédia tel que l'audio, la vidéo, les sous-titres et les métadonnées associées.
Tu peux utiliser la commande de terminal suivante pour séparer chaque image de la vidéo du drone :
ffmpeg -i input_video.mp4 frame_%04d.pngUne fois que nous avons séparé les images de la vidéo du drone, nous pouvons commencer à étiqueter les objets (maisons) qu'elles contiennent. En naviguant vers le dossier d'images via l'outil LabelImg, nous pouvons étiqueter les objets dans chaque image. Assure-toi d'enregistrer et de vérifier chaque image étiquetée. Après avoir annoté les images, nous pouvons maintenant passer à l'entraînement de YOLO11 en utilisant ces données.
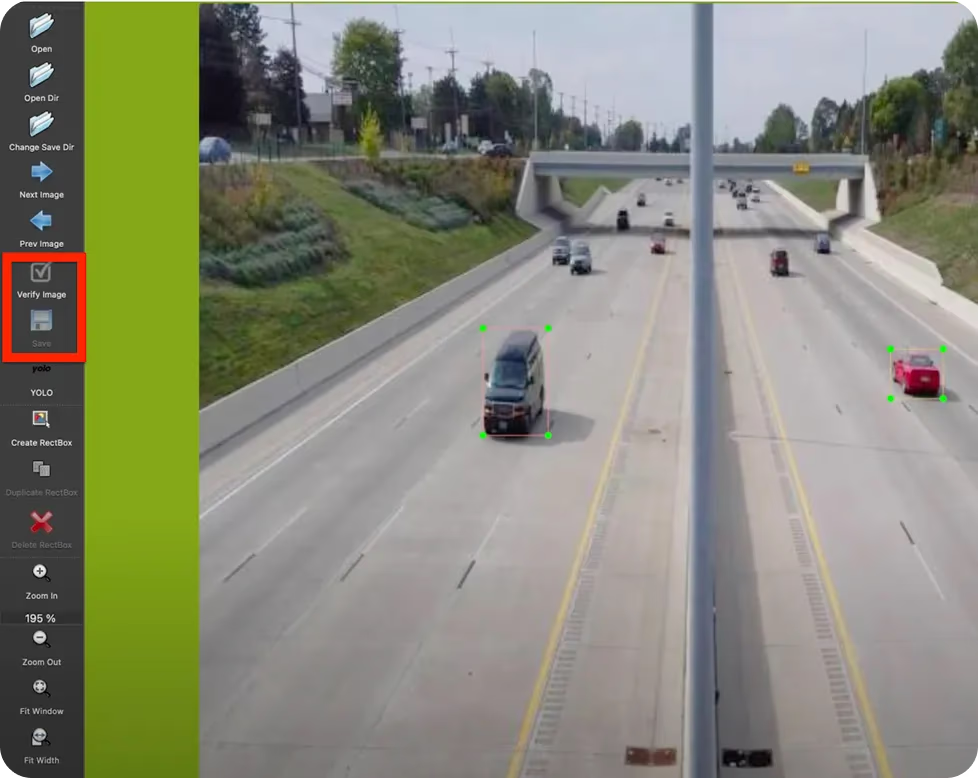
Fig 8. Un exemple d'enregistrement d'images annotées.
Link to this sectionFlux de travail d'entraînement du modèle YOLO11#
Avant de commencer l'entraînement de YOLO11, nous allons organiser nos images et nos étiquettes. Commence par créer deux dossiers : un nommé "train" et l'autre "valid". Répartis tes images entre ces dossiers. À l'intérieur de chacun, crée des sous-dossiers distincts pour les images et leurs fichiers d'étiquettes correspondants (format texte), comme illustré ci-dessous.
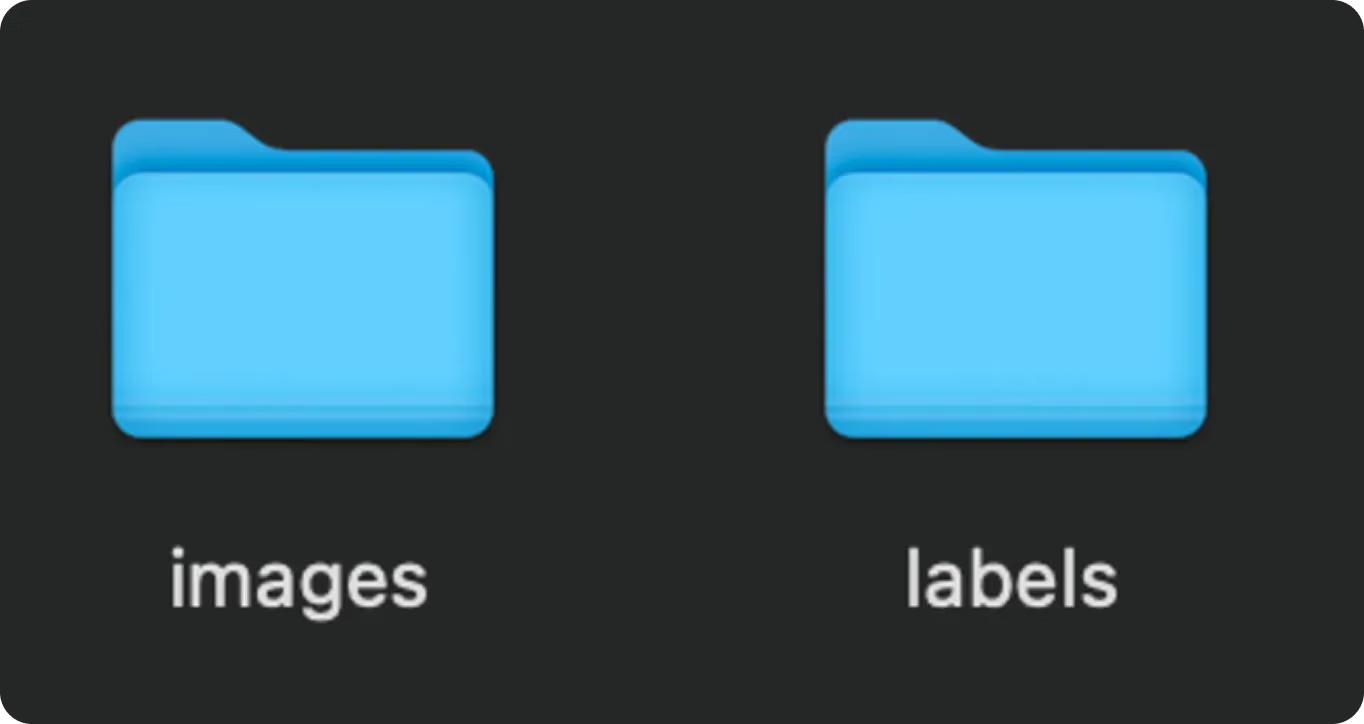
Fig 9. Un exemple de création de dossiers d'images et d'étiquettes.
Ensuite, nous pouvons commencer à entraîner le modèle YOLO11 comme suit :
- Étape 1 : Installe le paquet Python Ultralytics. Tu peux le faire en exécutant la commande “pip install ultralytics” dans ton terminal. Si tu rencontres des problèmes d'installation, consulte notre guide de dépannage pour obtenir des conseils et des astuces afin de les résoudre.
- Étape 2 : Une fois le paquet installé, crée un fichier nommé ‘data.yaml’. Il s'agit d'un fichier de configuration crucial pour entraîner le modèle. Dans le fichier data.yaml, inclus les informations suivantes : le chemin d'accès à ton jeu de données d'entraînement, le chemin d'accès à ton jeu de données de validation, le nombre de classes (nc) et une liste de noms de classes (names), comme indiqué ci-dessous.

Fig 10. Un exemple de fichier data.yaml.
- Étape 3 : Une fois le fichier ‘data.yaml’ configuré, tu peux lancer l'entraînement de ton modèle à l'aide du code Python suivant. Ce code charge le modèle YOLO11 pré-entraîné et l'entraîne selon tes configurations.
from ultralytics import YOLO
# Load a YOLO11 model
model = YOLO("yolo11n.pt") # choose your model, e.g., YOLO11 nano
# Train the model with your data and settings
model.train(data="data.yaml", epochs=100, imgsz=640)- Étape 4 : Une fois l'entraînement terminé, tu devrais voir un résultat similaire à celui illustré ci-dessous. Cela signifie que tu as réussi à entraîner ton modèle YOLO11 pour des applications basées sur des drones.
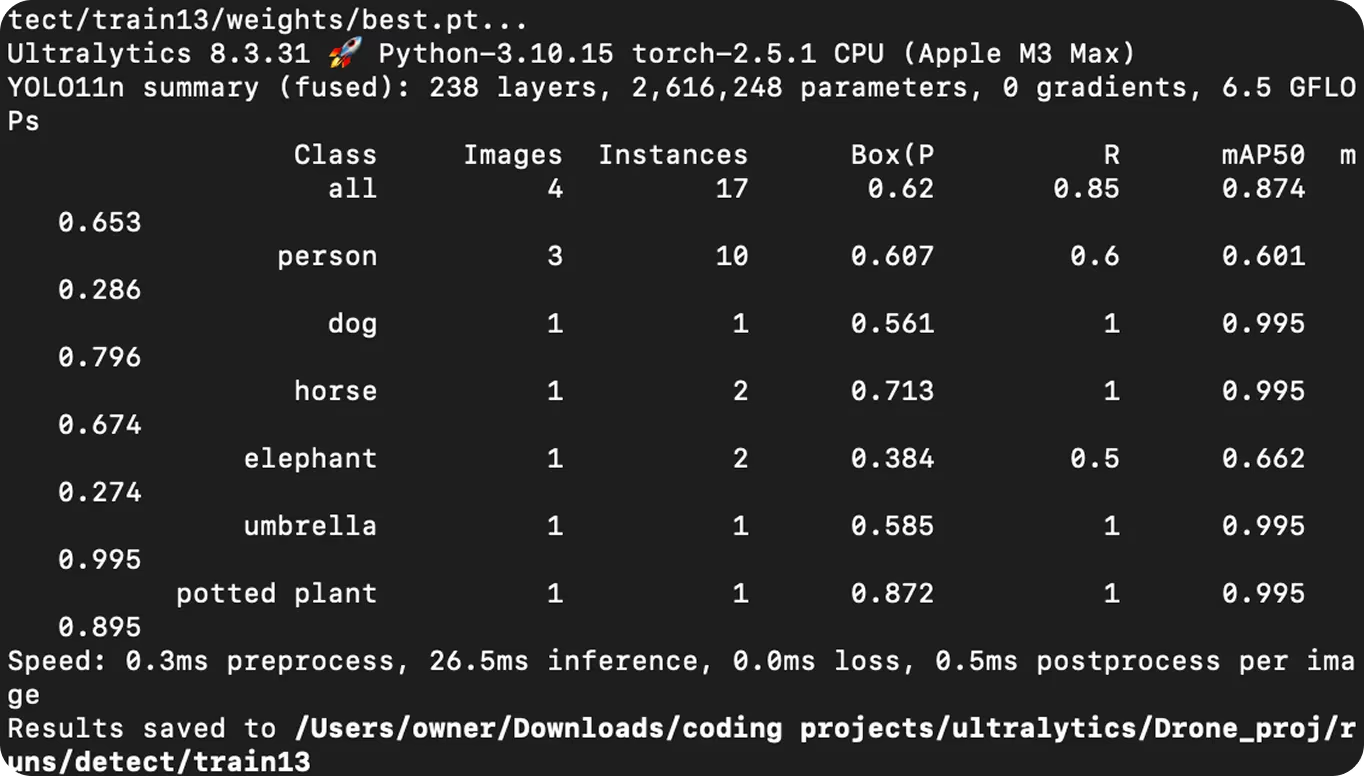
Fig 11. Le résultat affiché après l'entraînement du modèle.
Link to this sectionExécution de prédictions avec Ultralytics YOLO11 sur des drones#
Le modèle YOLO11 entraîné peut maintenant être utilisé pour faire des prédictions via un processus appelé inférence. L'inférence consiste à utiliser un modèle pour analyser des données nouvelles et inédites basées sur ce qu'il a appris pendant l'entraînement. Dans ce cas, le modèle peut être utilisé pour trouver et étiqueter des objets spécifiques, comme des maisons, dans des images ou des vidéos en dessinant des boîtes englobantes autour d'eux.
Pour exécuter une prédiction, tu peux utiliser le modèle YOLO11 entraîné sur une vidéo d'entrée avec le code Python suivant. Dans cet exemple, nous utiliserons la même vidéo de drone artificielle que celle utilisée pour l'entraînement, mais tu peux utiliser n'importe quel autre fichier vidéo si tu le préfères.
# Import library
from ultralytics import YOLO
# Load the YOLO model
model = YOLO("best.pt") # Choose your custom-trained model
# Predict the results from the model
results = model.predict(source="path/to/original/video.mp4", show=True, save=True)Après l'exécution de ce code, le fichier vidéo de sortie avec les prédictions et les boîtes englobantes sera enregistré.
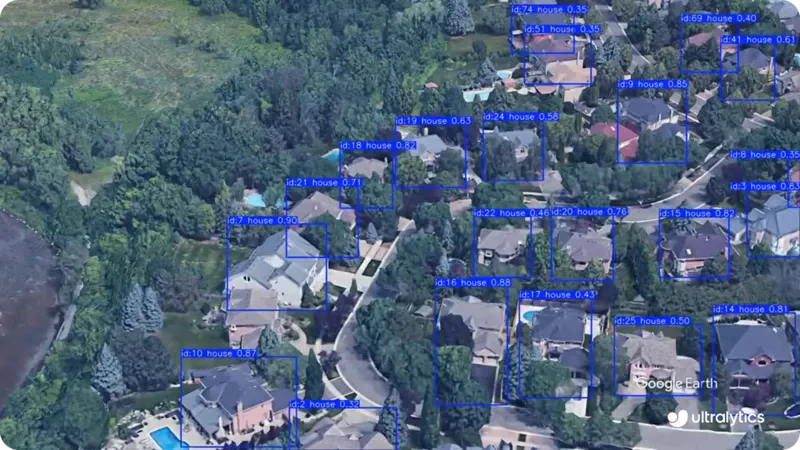
Fig 12. Une image du fichier vidéo de sortie.
Link to this sectionIntégration d'Ultralytics YOLO11 sur des drones pour diverses applications#
La détection de maisons pour les colis livrés par drone n'est qu'un exemple de la manière dont la vision par ordinateur et YOLO11 peuvent être appliqués. Voici quelques autres utilisations concrètes de la vision par ordinateur, de YOLO11 et des drones aériens :
-
Surveillance et sécurité : Les drones IA peuvent être utilisés pour surveiller de vastes zones en temps réel. Ils peuvent détecter des intrusions, suivre des activités suspectes et renforcer la sécurité aux frontières nationales ainsi que lors de grands événements publics.
-
Réponse aux catastrophes et recherche et sauvetage : Équipés de caméras thermiques et de détection d'objets, les drones peuvent aider à localiser des survivants dans les zones sinistrées. Ils peuvent également évaluer les dégâts et livrer des fournitures d'urgence.
-
Agriculture et agriculture de précision : Les drones intégrés à la vision par ordinateur peuvent être utilisés pour analyser la santé des cultures et détecter les maladies, aidant ainsi les agriculteurs à augmenter leurs rendements tout en réduisant les coûts.
-
Cartographie et analyse géospatiale : En collectant des cartes 3D haute résolution, les drones IA peuvent aider à la planification urbaine et aux relevés topographiques. Ils fournissent des évaluations de terrain plus rapides et plus précises que les méthodes traditionnelles.
Link to this sectionPoints clés#
Les drones IA alimentés par la vision par ordinateur transforment de nombreux secteurs, de la livraison de colis à l'aide en cas d'urgence ou dans l'agriculture. Dans ce guide, nous avons parcouru la création d'une vidéo de drone artificielle, l'étiquetage des objets, l'entraînement de YOLO11 et son utilisation pour détecter des maisons.
L'application de la détection d'objets aux images de drones rend ces appareils plus intelligents, leur permettant de reconnaître et de suivre automatiquement les objets en temps réel. À mesure que la technologie progresse, les drones pilotés par l'IA joueront probablement un rôle encore plus important pour accélérer les livraisons, améliorer la sécurité et aider aux interventions en cas de catastrophe.
Rejoins notre communauté et explore notre dépôt GitHub pour en savoir plus sur la vision par IA, et consulte nos options de licence pour lancer tes projets de vision par ordinateur. Tu t'intéresses à des innovations comme l'IA dans la fabrication ou la vision par ordinateur dans l'industrie automobile ? Visite nos pages de solutions pour en découvrir plus.






