Construye aplicaciones para drones impulsadas por IA con Ultralytics YOLO11
Aprende a construir aplicaciones de drones impulsadas por IA con Ultralytics YOLO11, permitiendo la detección de objetos en tiempo real y tareas de visión artificial basadas en drones.

Las compras en tienda y las compras en línea pueden parecer similares, pero dependen de logísticas diferentes. Las tiendas necesitan reponer estantes, mientras que los pedidos en línea dependen de entregas en la puerta de casa. Gracias a los avances tecnológicos, ambas experiencias de compra están siendo transformadas en paralelo.
Por ejemplo, un cambio importante está ocurriendo en las entregas. Los drones impulsados por IA están cambiando la forma en que los productos llegan a nuestros hogares. Se espera que estos drones inteligentes gestionen alrededor de 808 millones de entregas en la próxima década, convirtiendo los cielos en la nueva ruta de entrega para el comercio cotidiano.
Los drones de reparto utilizan inteligencia artificial (IA) y computer vision, un subcampo de la IA que se usa para analizar datos visuales, para navegar y maniobrar alrededor de obstáculos. Los modelos de computer vision como Ultralytics YOLO11 pueden ayudar a los drones a detectar y rastrear objetos en tiempo real, permitiéndoles comprender e interactuar mejor con su entorno.

Fig 1. Un dron de reparto llevando un paquete a su destino.
Empresas como Meituan y DJI ya están integrando computer vision en sus drones. De hecho, la rápida adopción de drones en diversas industrias ha preparado el mercado de drones de IA para dispararse a 206.9 mil millones de dólares para 2031.
En este artículo, analizaremos más de cerca cómo se pueden utilizar modelos de computer vision como Ultralytics YOLO11 en aplicaciones basadas en drones, como las entregas mediante drones. Repasaremos un ejemplo que mostrará cómo se pueden desarrollar y probar estas tecnologías antes de usarlas en escenarios del mundo real.
Link to this sectionUso de Ultralytics YOLO11 en drones para detectar casas#
Una parte clave de los drones de reparto es su capacidad para detectar casas mientras navegan. Para recrear esta capacidad y entender cómo funciona, entrenaremos un modelo de computer vision que pueda identificar casas en metraje capturado por un dron aéreo. Personalizaremos el entrenamiento de YOLO11 para esto, lo cual implica ajustar un modelo YOLO11 pre-entrenado para reconocer y detectar casas utilizando ejemplos etiquetados.
Para hacerlo, necesitaremos datos de video de alta calidad de un dron. Curiosamente, incluso sin acceso a un dron real, podemos generar metraje aéreo realista. Echemos un vistazo a cómo.
Link to this sectionCreación de una toma de dron artificial usando Google Earth Studio#
Google Earth Studio es una herramienta de animación basada en la web que los usuarios pueden utilizar para crear contenido estático y animado mediante las imágenes satelitales y 3D de Google Earth. Podemos usarla para crear metraje aéreo realista.
El primer paso es abrir Google Earth Studio y crear un proyecto, como se muestra a continuación.
Necesitarás una cuenta de Google para iniciar sesión.
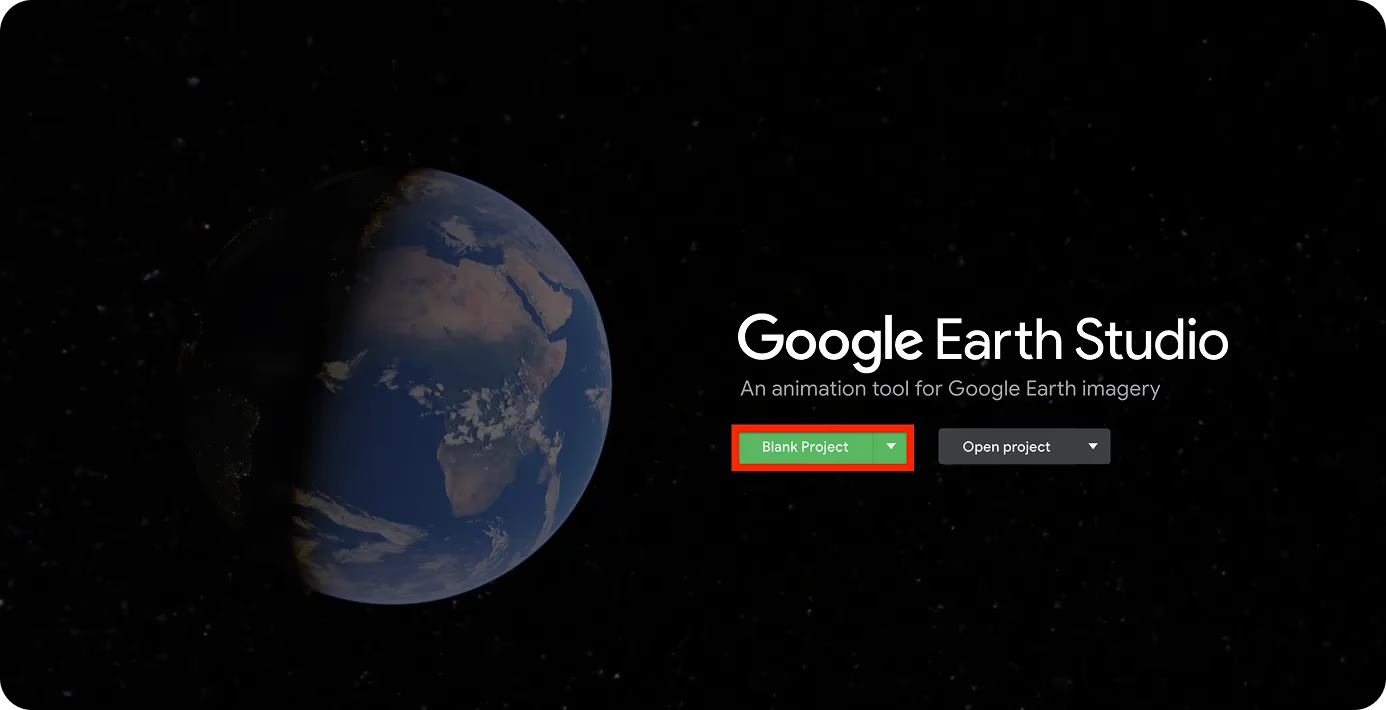
Fig 2. Creación de un proyecto en Google Earth Studio.
Una vez que hayas iniciado sesión, puedes elegir una ubicación para tu video de dron artificial. Usando la barra de búsqueda en la esquina superior izquierda de la página, puedes buscar ubicaciones. Para este tutorial, elegiremos Canadá. Además, como vamos a entrenar un modelo para detectar casas, nuestro video de dron debería tener una vista aérea de casas.
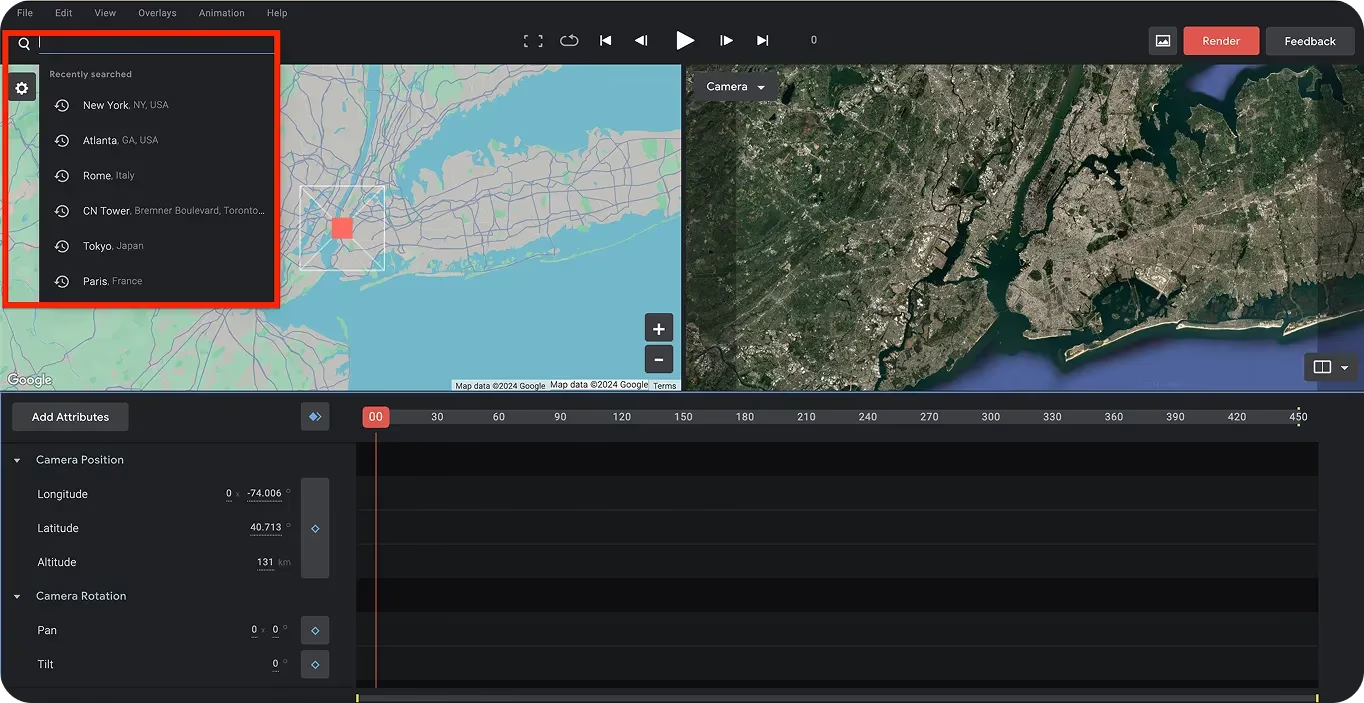
Fig 3. Elección de una ubicación usando Google Earth Studio.
A continuación, podemos establecer el primer y el último fotograma para capturar el movimiento de la toma del dron artificial. Una vez que hayas elegido la ubicación inicial para la toma del dron, establece el primer fotograma usando los diamantes azules, como se muestra a continuación.
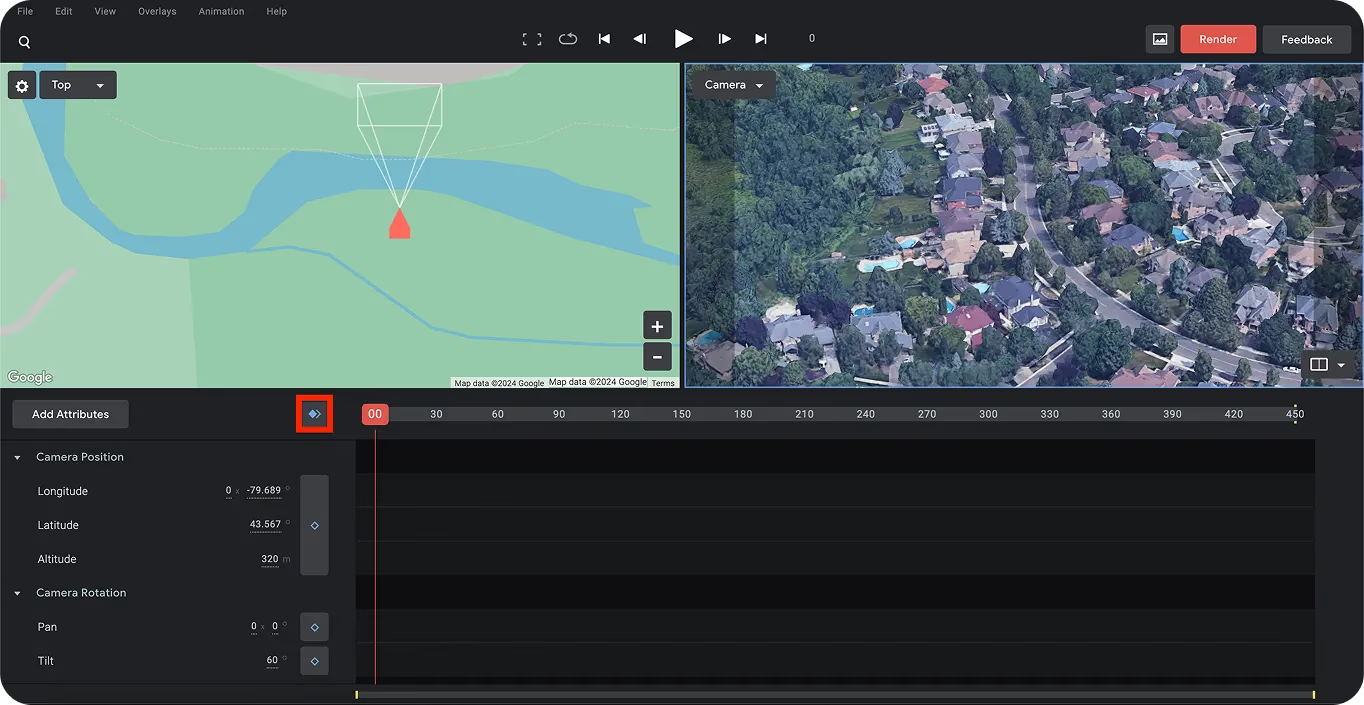
Fig 4. Configuración del primer fotograma usando los diamantes azules.
Luego, podemos elegir el último fotograma para determinar el destino del dron. Esto nos ayudará a crear un efecto de movimiento para el metraje del dron. Para hacer esto, desliza la barra (resaltada a continuación) hacia la derecha hasta un tiempo específico para crear el efecto de movimiento para la toma del dron. Una vez más, usa los diamantes azules para establecer el último punto.
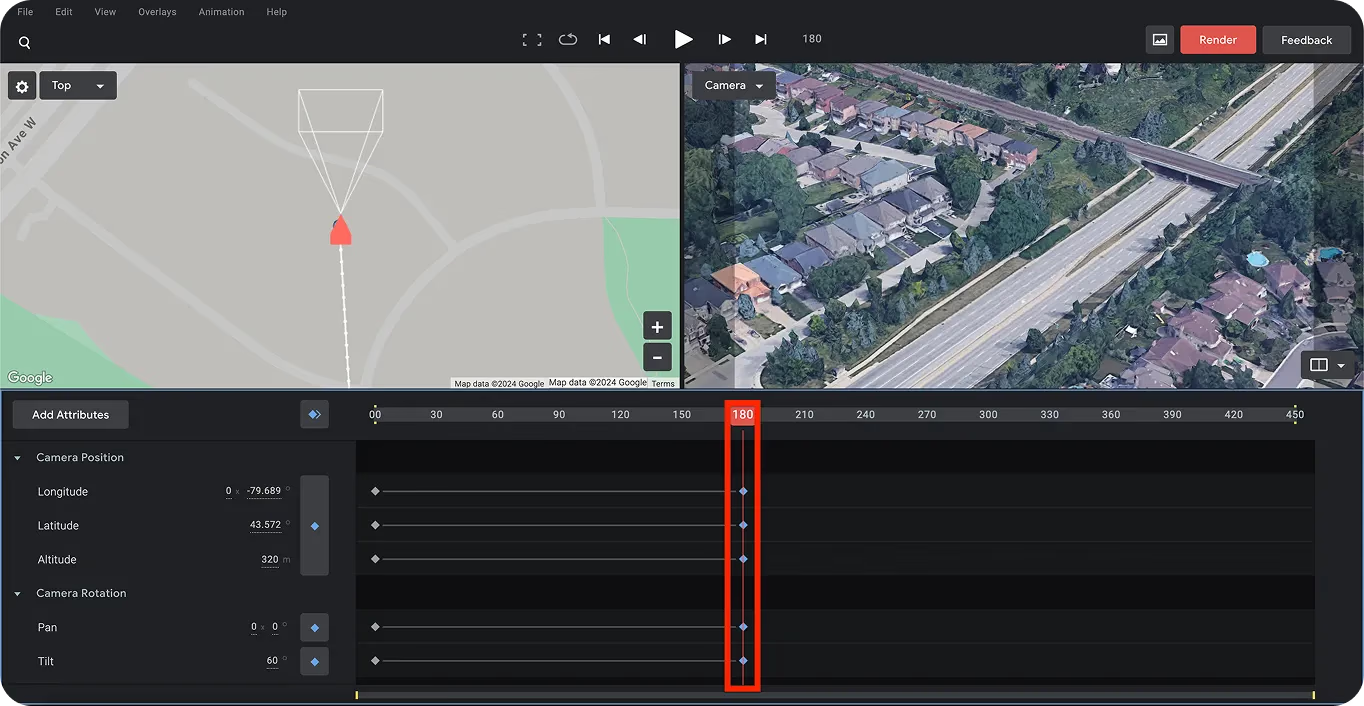
Fig 5. Configuración del último fotograma moviendo la barra.
Finalmente, puedes guardar este proyecto y renderizarlo haciendo clic en el botón rojo “Render” en la esquina superior derecha de la página. Esto te dará el resultado final del video de la toma del dron, creando exitosamente metraje de video de dron artificial.
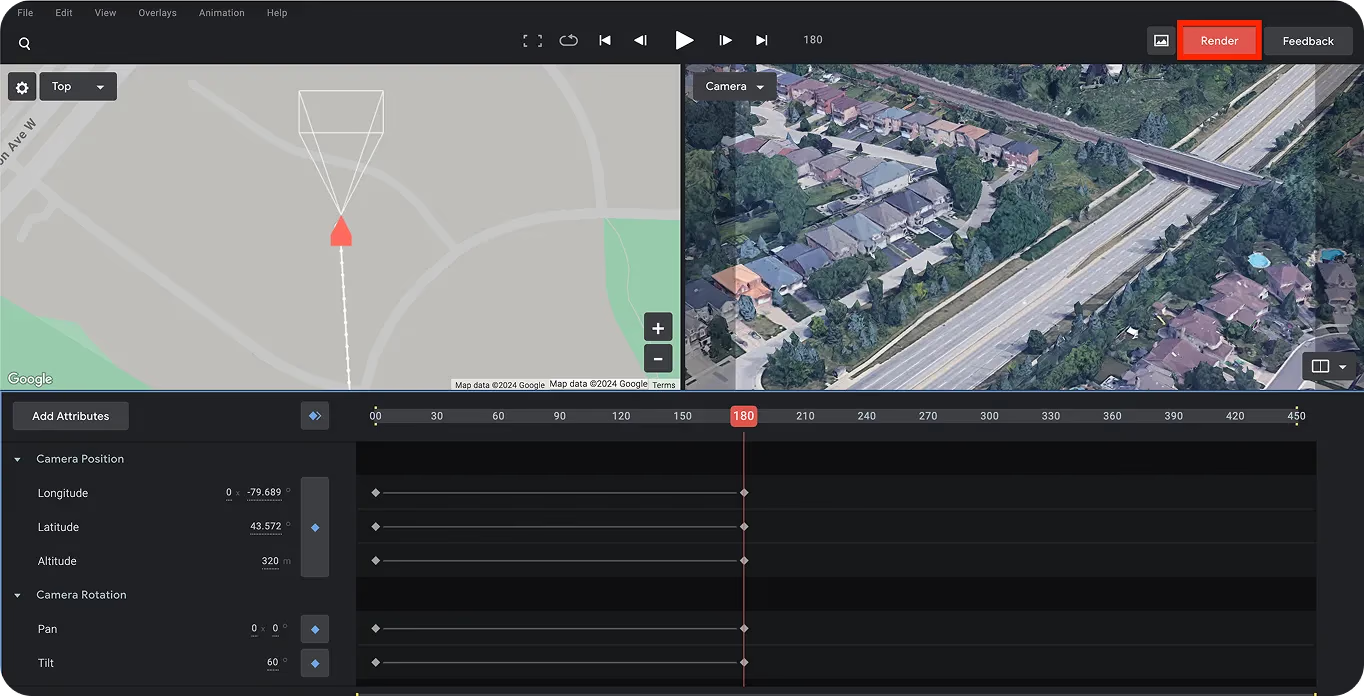
Fig 6. Renderizado del video de salida final.
Link to this section¿Cómo etiquetar los datos del dron?#
Ahora que hemos creado metraje de video de dron artificial, el siguiente paso es etiquetar o anotar las casas que hay en él. También necesitaremos separar los fotogramas individuales del video.
Para empezar con esto, instalaremos LabelImg. LabelImg es una herramienta de etiquetado de imágenes de código abierto. Puedes instalarla directamente desde el terminal usando el instalador de paquetes pip ejecutando el siguiente comando: “pip install labelImg”.
Después de la instalación, puedes ejecutar la herramienta usando el comando ‘labelImg’ en tu terminal o símbolo del sistema. Esto te llevará a la página que se muestra a continuación.
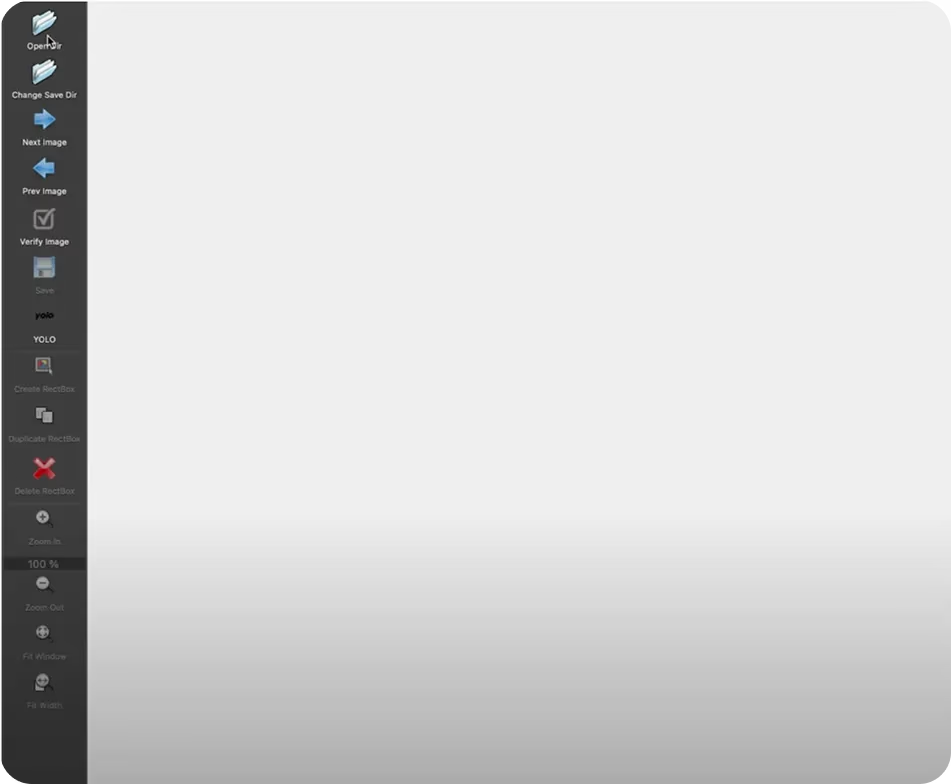
Fig 7. La interfaz de la herramienta LabelImg.
Mientras tanto, podemos usar un conversor de video a imagen en línea o una herramienta llamada FFmpeg para dividir el video en fotogramas. FFmpeg es una colección de librerías y herramientas para procesar contenido multimedia como audio, video, subtítulos y metadatos relacionados.
Puedes usar el siguiente comando de terminal para separar cada fotograma del video de metraje del dron:
ffmpeg -i input_video.mp4 frame_%04d.pngUna vez que hayamos separado los fotogramas del metraje del dron, podemos empezar a etiquetar los objetos (casas) en ellos. Navegando a la carpeta de imágenes a través de la herramienta LabelImg, podemos etiquetar los objetos en cada imagen. Asegúrate de guardar y verificar cada imagen etiquetada. Después de anotar las imágenes, podemos pasar a entrenar YOLO11 usando estos datos.
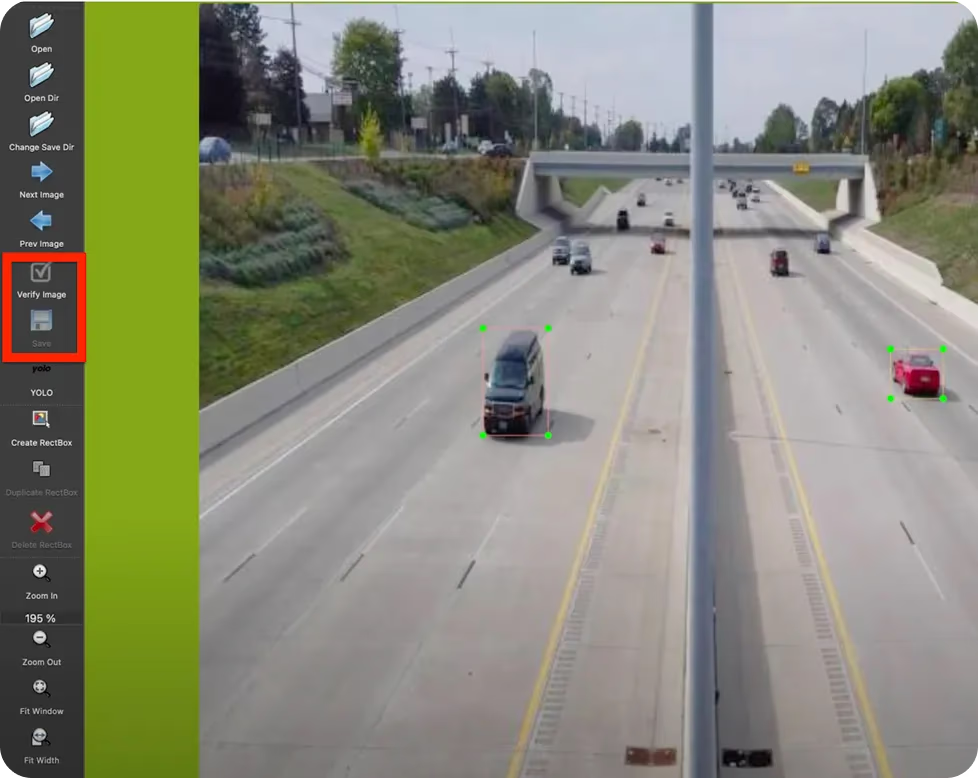
Fig 8. Un ejemplo de guardar imágenes anotadas.
Link to this sectionFlujo de trabajo de entrenamiento del modelo YOLO11#
Antes de comenzar a entrenar YOLO11, organizaremos nuestras imágenes y etiquetas. Empieza creando dos carpetas: una llamada "train" y la otra "valid". Divide tus imágenes entre estas carpetas. Dentro de cada una, crea subcarpetas separadas para las imágenes y sus archivos de etiquetas correspondientes (formato de texto), como se muestra a continuación.
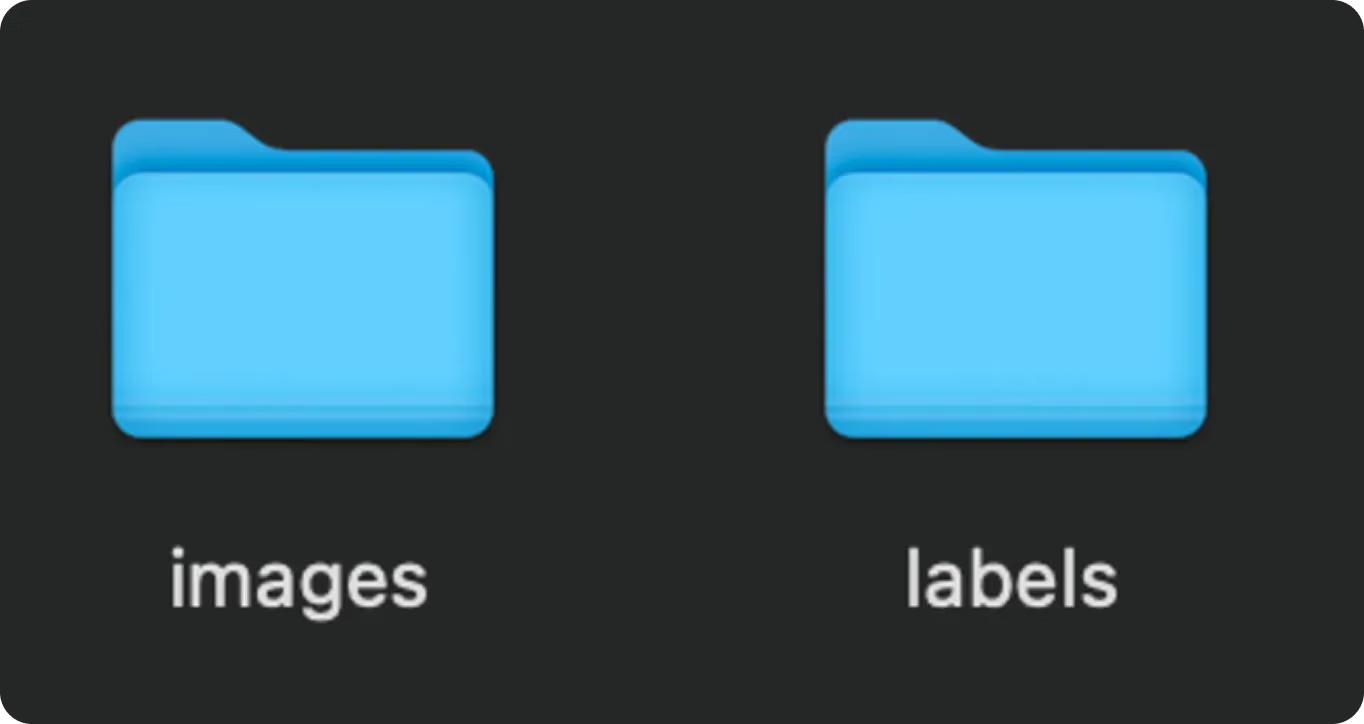
Fig 9. Un ejemplo de creación de carpetas de imágenes y etiquetas.
Luego, podemos empezar a entrenar el modelo YOLO11 de la siguiente manera:
- Paso 1: Instala el paquete de Python de Ultralytics. Puedes hacerlo ejecutando el comando “pip install ultralytics” en tu terminal. Si encuentras algún problema de instalación, consulta nuestra guía de solución de problemas para obtener consejos y trucos que te ayuden a resolverlos.
- Paso 2: Después de instalar el paquete correctamente, crea un archivo con el nombre ‘data.yaml’. Este es un archivo de configuración que es crucial para entrenar el modelo. En el archivo data.yaml, incluye la siguiente información: la ruta a tu conjunto de datos de entrenamiento, la ruta a tu conjunto de datos de validación, el número de clases (nc) y una lista de nombres de clases (names), como se muestra a continuación.

Fig 10. Un ejemplo de un archivo data.yaml.
- Paso 3: Una vez configurado el archivo ‘data.yaml’, puedes empezar a entrenar tu modelo usando el siguiente código de Python. Este código carga el modelo YOLO11 pre-entrenado y lo entrena según tus configuraciones.
from ultralytics import YOLO
# Load a YOLO11 model
model = YOLO("yolo11n.pt") # choose your model, e.g., YOLO11 nano
# Train the model with your data and settings
model.train(data="data.yaml", epochs=100, imgsz=640)- Paso 4: Una vez completado el entrenamiento, deberías ver una salida similar a la que se muestra a continuación. Esto significa que has entrenado con éxito tu modelo YOLO11 para aplicaciones basadas en drones.
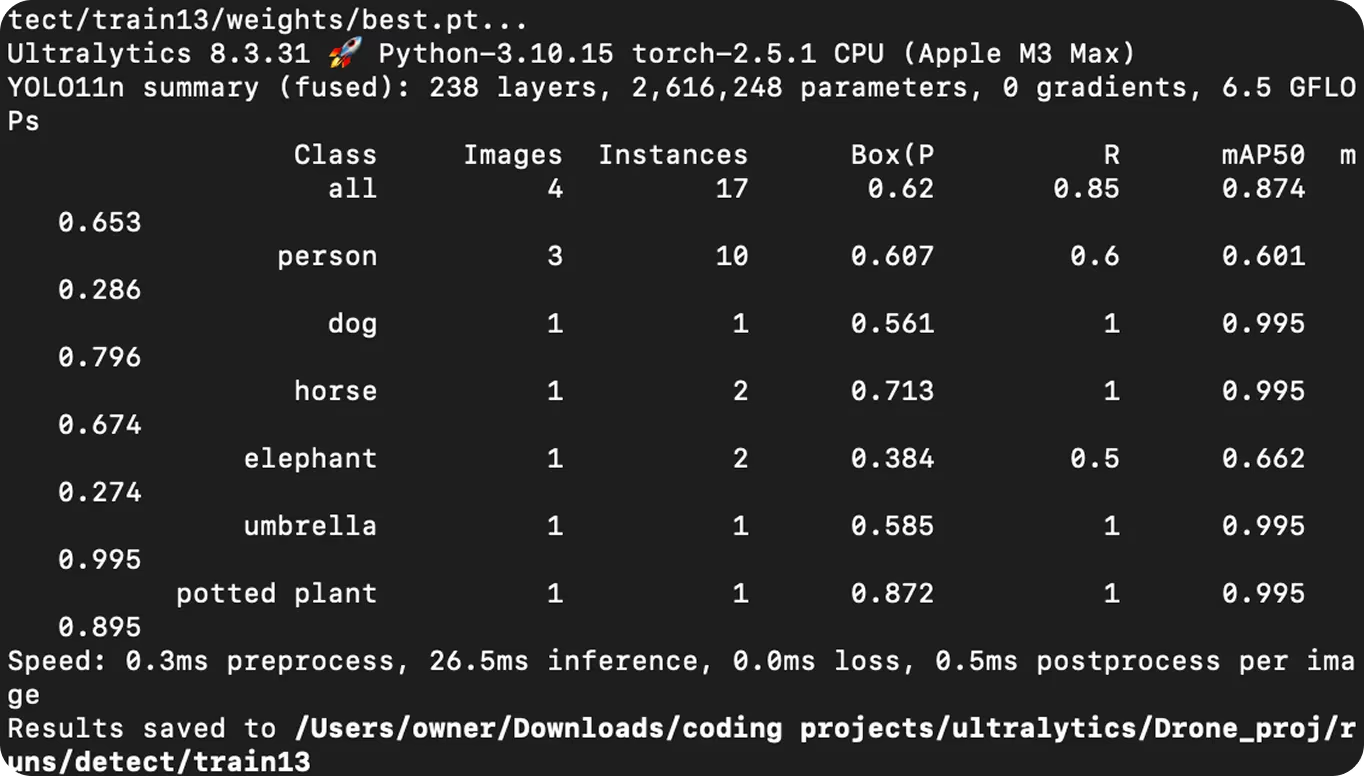
Fig 11. La salida mostrada después del entrenamiento del modelo.
Link to this sectionEjecución de predicciones usando Ultralytics YOLO11 en drones#
El modelo YOLO11 entrenado ahora se puede usar para hacer predicciones a través de un proceso llamado inferencia. La inferencia implica usar un modelo para analizar datos nuevos y no vistos basados en lo que aprendió durante el entrenamiento. En este caso, el modelo se puede usar para encontrar y etiquetar objetos específicos, como casas, en imágenes o videos dibujando cuadros delimitadores alrededor de ellos.
Para ejecutar una predicción, puedes usar el modelo YOLO11 entrenado en un video de entrada usando el siguiente código de Python. En este ejemplo, usaremos el mismo video de dron artificial que se usó para el entrenamiento, pero puedes usar cualquier otro archivo de video si lo prefieres.
# Import library
from ultralytics import YOLO
# Load the YOLO model
model = YOLO("best.pt") # Choose your custom-trained model
# Predict the results from the model
results = model.predict(source="path/to/original/video.mp4", show=True, save=True)Después de ejecutar este código, se guardará el archivo de video de salida con las predicciones y los cuadros delimitadores.
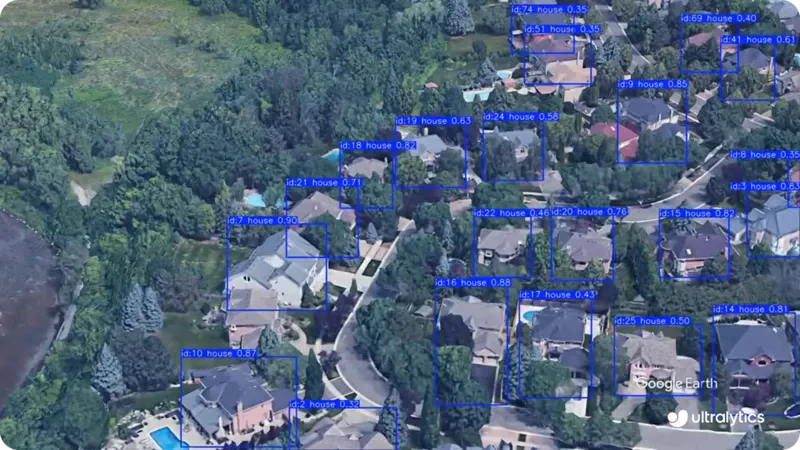
Fig 12. Un fotograma del archivo de video de salida.
Link to this sectionIntegración de Ultralytics YOLO11 en drones para diversas aplicaciones#
Detectar casas para paquetes de entrega de drones es solo un ejemplo de cómo se pueden aplicar computer vision y YOLO11. Aquí tienes otros usos en el mundo real de computer vision, YOLO11 y drones aéreos:
-
Vigilancia y seguridad: Los drones de IA se pueden usar para monitorear áreas grandes en tiempo real. Pueden detectar intrusiones, rastrear actividades sospechosas y mejorar la seguridad en fronteras nacionales, así como en grandes eventos públicos.
-
Respuesta ante desastres y búsqueda y rescate: Equipados con cámaras térmicas y detección de objetos, los drones pueden ayudar a localizar supervivientes en zonas de desastre. También pueden evaluar daños y entregar suministros de emergencia.
-
Agricultura y agricultura de precisión: Los drones integrados con computer vision pueden utilizarse para analizar la salud de los cultivos y detectar enfermedades, ayudando a los agricultores a aumentar los rendimientos mientras reducen los costes.
-
Cartografía y análisis geoespacial: Al recopilar mapas 3D de alta resolución, los drones de IA pueden ayudar con la planificación urbana y los levantamientos topográficos. Proporcionan evaluaciones del terreno más rápidas y precisas que los métodos tradicionales.
Link to this sectionConclusiones clave#
Los drones de IA impulsados por computer vision están cambiando muchas industrias, desde la entrega de paquetes hasta la ayuda en emergencias y la agricultura. En esta guía, recorrimos la creación de un video de dron artificial, la etiquetación de objetos en él, el entrenamiento de YOLO11 y su uso para detectar casas.
Aplicar detección de objetos a metraje de drones hace que estos drones sean más inteligentes, permitiéndoles reconocer y rastrear objetos automáticamente en tiempo real. A medida que la tecnología mejora, es probable que los drones impulsados por IA desempeñen un papel aún mayor en hacer las entregas más rápidas, mejorar la seguridad y ayudar con la respuesta ante desastres.
Únete a nuestra comunidad y explora nuestro repositorio de GitHub para aprender más sobre visión por IA, y consulta nuestras opciones de licencia para poner en marcha tus proyectos de computer vision. ¿Te interesan innovaciones como la IA en la fabricación o el computer vision en la industria automotriz? Visita nuestras páginas de soluciones para descubrir más.






