Ultralytics YOLO11로 AI 기반 드론 애플리케이션 구축
Ultralytics YOLO11로 실시간 객체 탐지 및 드론 기반 컴퓨터 비전 작업을 구현하여 AI 기반 드론 애플리케이션을 구축하는 방법을 알아보십시오.

매장 쇼핑과 온라인 쇼핑은 비슷해 보일 수 있지만, 서로 다른 물류 시스템에 의존합니다. 매장은 선반 재입고가 필요한 반면, 온라인 주문은 문앞 배송에 의존합니다. 기술의 발전 덕분에 두 쇼핑 경험은 병행하여 변화하고 있습니다.
예를 들어, 배송 분야에서 큰 변화가 일어나고 있습니다. AI 기반 드론은 제품이 우리 집으로 도착하는 방식을 바꾸고 있습니다. 이러한 스마트 드론은 향후 10년 동안 약 808 million deliveries를 처리할 것으로 예상되며, 하늘을 일상 상거래를 위한 새로운 배송 경로로 바꾸고 있습니다.
배송 드론은 인공지능(AI)과 시각 데이터를 분석하는 AI의 하위 분야인 computer vision을 사용하여 장애물을 탐색하고 회피합니다. Ultralytics YOLO11과 같은 컴퓨터 비전 모델은 드론이 실시간으로 객체를 감지하고 추적하도록 도와 드론이 주변 환경을 더 잘 이해하고 상호 작용할 수 있게 합니다.

Fig 1. 목적지로 패키지를 전달하는 배송 드론.
Meituan 및 DJI와 같은 기업들은 이미 컴퓨터 비전을 드론에 통합하고 있습니다. 실제로 다양한 산업에서 드론이 빠르게 도입되면서 AI drone market은 2031년까지 2,069억 달러 규모로 급성장할 것으로 예상됩니다.
이 글에서는 Ultralytics YOLO11과 같은 컴퓨터 비전 모델이 드론 배송과 같은 드론 기반 애플리케이션에 어떻게 사용될 수 있는지 자세히 살펴봅니다. 실제 시나리오에서 사용하기 전에 이러한 기술을 어떻게 개발하고 테스트할 수 있는지 보여주는 예제를 단계별로 알아보겠습니다.
Link to this section주택 감지를 위해 드론에서 Ultralytics YOLO11 사용하기#
배송 드론의 핵심 요소는 비행 중 주택을 감지하는 능력입니다. 이 기능을 재현하고 작동 방식을 이해하기 위해, 항공 드론이 촬영한 영상에서 주택을 식별할 수 있는 컴퓨터 비전 모델을 학습시킵니다. 이를 위해 YOLO11을 custom-train할 것이며, 이는 라벨링된 예제를 사용하여 사전 학습된 YOLO11 모델을 미세 조정하여 주택을 인식하고 감지하는 과정을 포함합니다.
이를 위해 드론에서 촬영한 고품질 영상 데이터가 필요합니다. 흥미롭게도 실제 드론이 없더라도 현실적인 항공 영상을 생성할 수 있습니다. 그 방법을 살펴보겠습니다.
Link to this sectionGoogle Earth Studio를 사용하여 인공 드론 샷 생성하기#
Google Earth Studio는 사용자가 Google Earth의 위성 및 3D 이미지를 사용하여 정지 이미지와 애니메이션 콘텐츠를 만들 수 있는 웹 기반 애니메이션 도구입니다. 이를 사용하여 사실적인 항공 영상을 만들 수 있습니다.
첫 번째 단계는 Google Earth Studio를 열고 아래와 같이 프로젝트를 만드는 것입니다.
로그인하려면 Google 계정이 필요합니다.
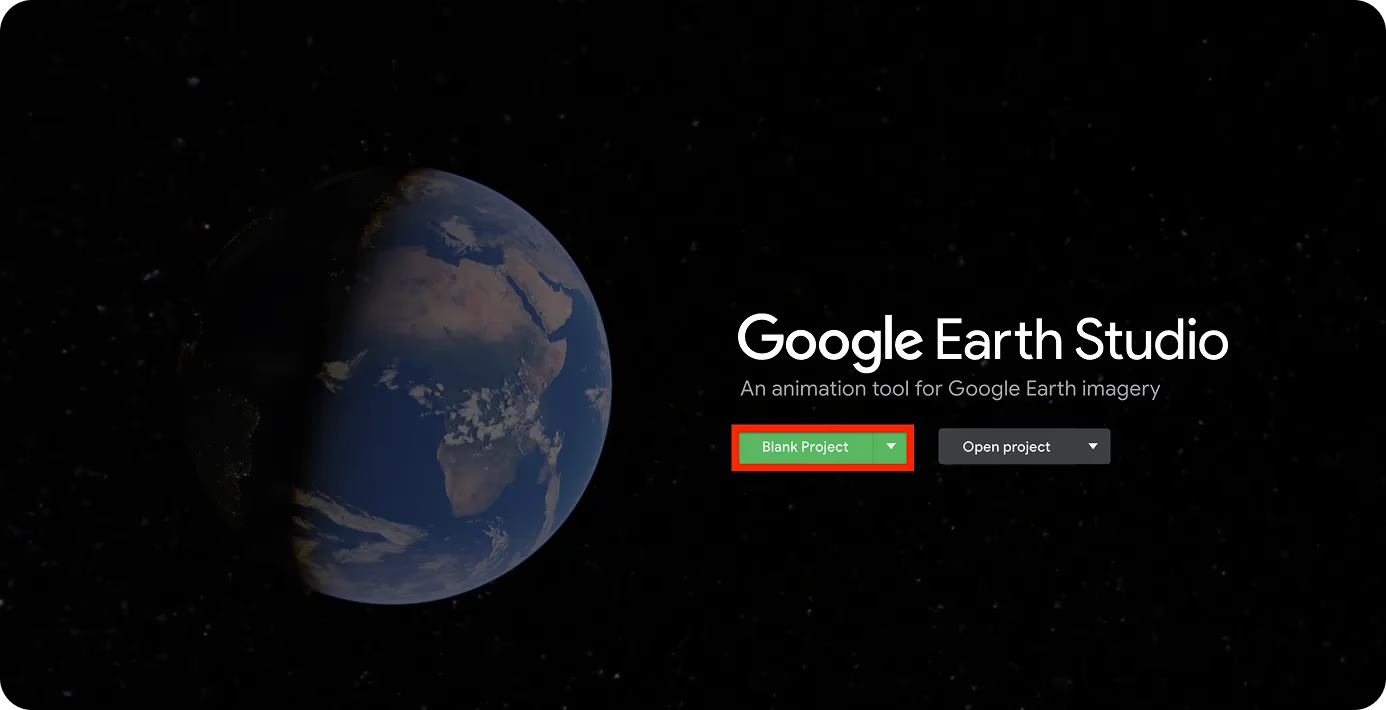
Fig 2. Google Earth Studio에서 프로젝트 만들기.
로그인한 후 인공 드론 영상에 사용할 위치를 선택할 수 있습니다. 페이지 왼쪽 상단의 검색 창을 사용하여 위치를 검색할 수 있습니다. 이 튜토리얼에서는 캐나다를 선택하겠습니다. 또한 주택을 감지하는 모델을 학습시킬 예정이므로, 드론 영상에는 주택의 항공 뷰가 포함되어야 합니다.
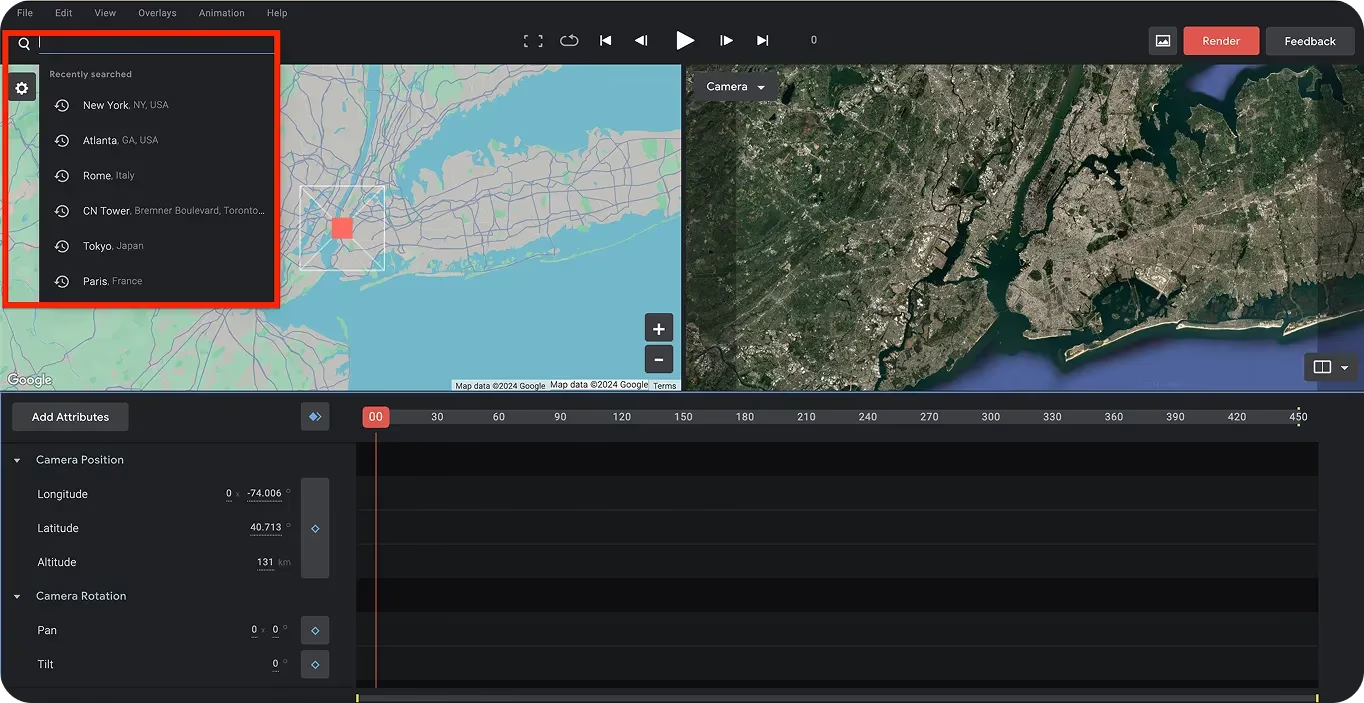
Fig 3. Google Earth Studio를 사용하여 위치 선택하기.
다음으로, 인공 드론 샷의 움직임을 캡처하기 위해 첫 번째와 마지막 프레임을 설정할 수 있습니다. 드론 샷의 시작 위치를 선택했으면 아래와 같이 파란색 다이아몬드를 사용하여 첫 번째 프레임을 설정합니다.
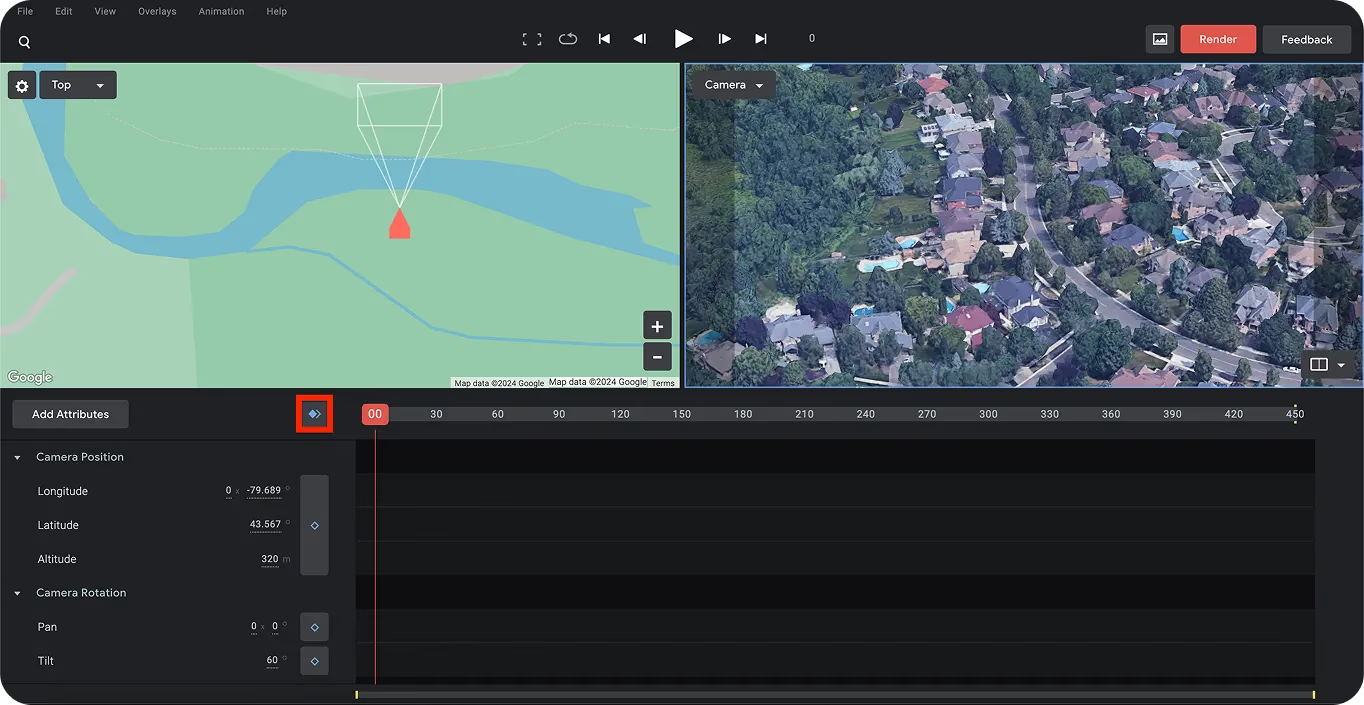
Fig 4. 파란색 다이아몬드를 사용하여 첫 번째 프레임 설정하기.
다음으로, 드론의 목적지를 결정하기 위해 마지막 프레임을 선택할 수 있습니다. 이는 드론 영상에 움직이는 효과를 만드는 데 도움이 됩니다. 이렇게 하려면 아래 강조 표시된 바를 오른쪽으로 특정 시간만큼 밀어 드론 샷에 움직이는 효과를 만듭니다. 다시 한번 파란색 다이아몬드를 사용하여 마지막 지점을 설정합니다.
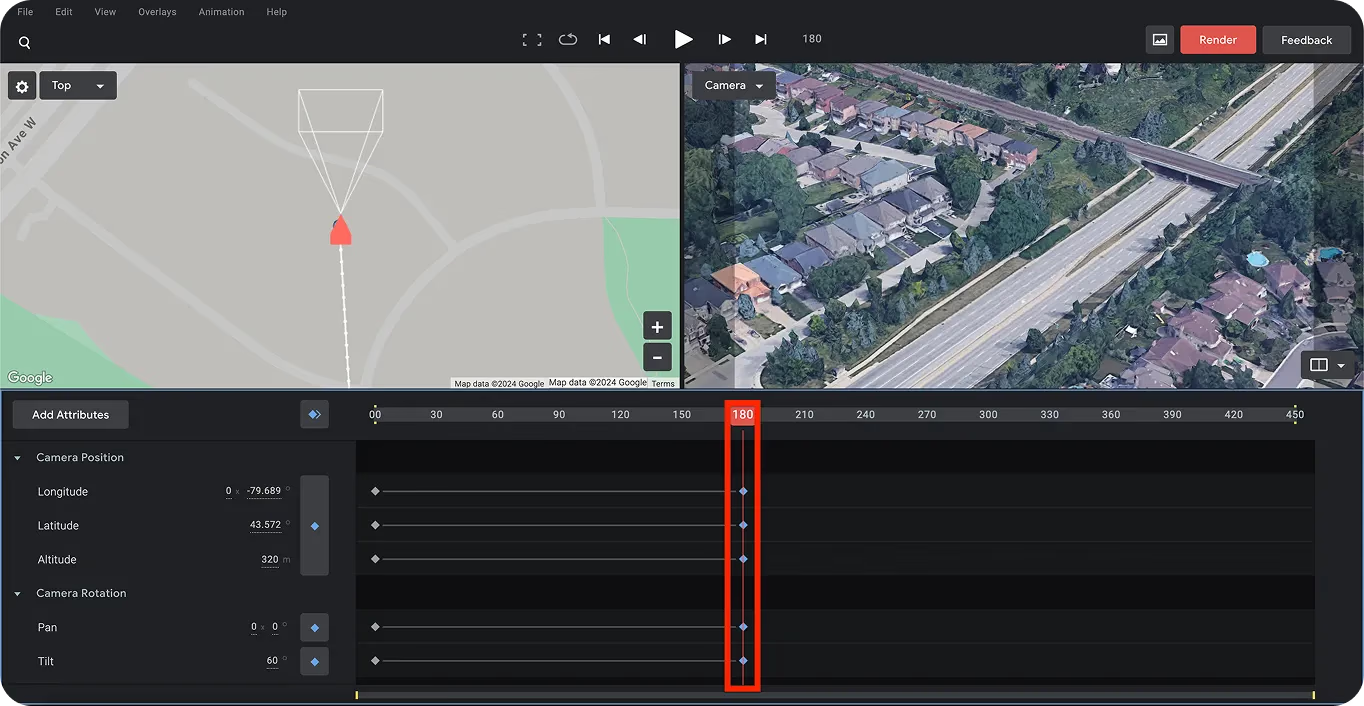
Fig 5. 바를 움직여 마지막 프레임 설정하기.
마지막으로, 페이지 오른쪽 상단에 있는 빨간색 'Render' 버튼을 클릭하여 이 프로젝트를 저장하고 렌더링할 수 있습니다. 그러면 드론 샷의 최종 영상 출력이 생성되어 인공 드론 영상 푸티지가 성공적으로 만들어집니다.
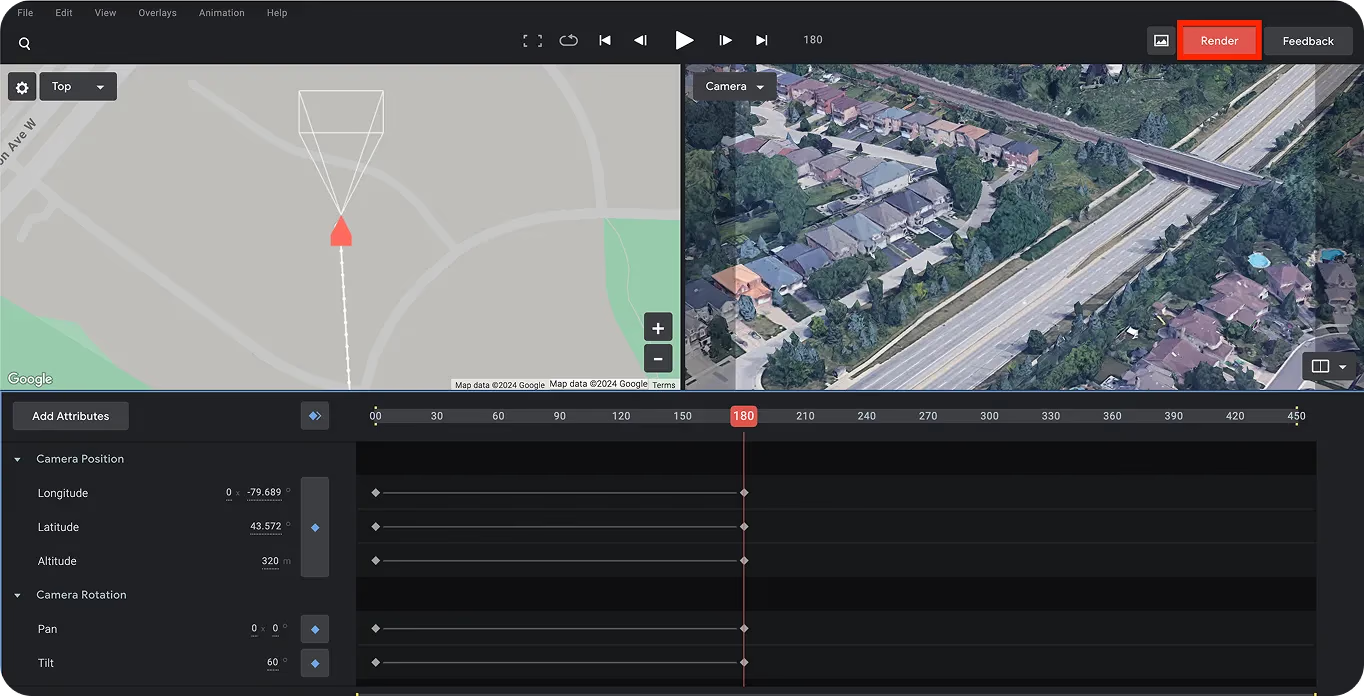
Fig 6. 최종 출력 영상 렌더링하기.
Link to this section드론 데이터 라벨링 방법은 무엇입니까?#
인공 드론 영상 푸티지를 만들었으니, 다음 단계는 그 안에 있는 주택을 label or annotate하는 것입니다. 또한 영상의 개별 프레임을 분리해야 합니다.
이를 시작하려면 LabelImg를 설치합니다. LabelImg는 오픈 소스 이미지 라벨링 도구입니다. 터미널에서 pip 패키지 설치 프로그램을 사용하여 다음 명령어를 실행하여 직접 설치할 수 있습니다: "pip install labelImg".
설치 후 터미널이나 명령 프롬프트에서 'labelImg' 명령어를 사용하여 도구를 실행할 수 있습니다. 그러면 아래와 같은 페이지가 나타납니다.
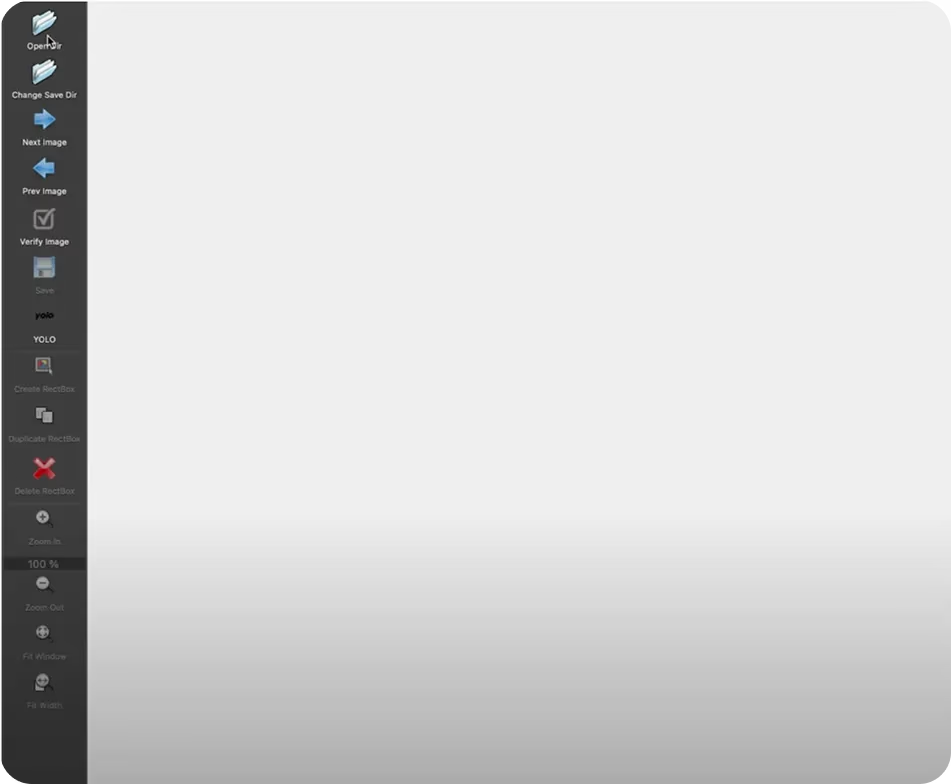
Fig 7. LabelImg 도구 인터페이스.
한편, 온라인 비디오-이미지 변환기나 FFmpeg라는 도구를 사용하여 비디오를 프레임으로 분할할 수 있습니다. FFmpeg는 오디오, 비디오, 자막 및 관련 메타데이터와 같은 멀티미디어 콘텐츠를 처리하기 위한 라이브러리 및 도구 모음입니다.
다음 터미널 명령어를 사용하여 드론 영상 비디오의 각 프레임을 분리할 수 있습니다:
ffmpeg -i input_video.mp4 frame_%04d.png드론 영상의 프레임을 분리한 후, 그 안의 객체(주택)에 라벨링을 시작할 수 있습니다. LabelImg 도구를 통해 이미지 폴더로 이동하여 각 이미지의 객체에 라벨을 지정할 수 있습니다. 모든 라벨링된 이미지를 저장하고 확인하십시오. 이미지를 어노테이션한 후, 이제 이 데이터를 사용하여 YOLO11 학습을 진행할 수 있습니다.
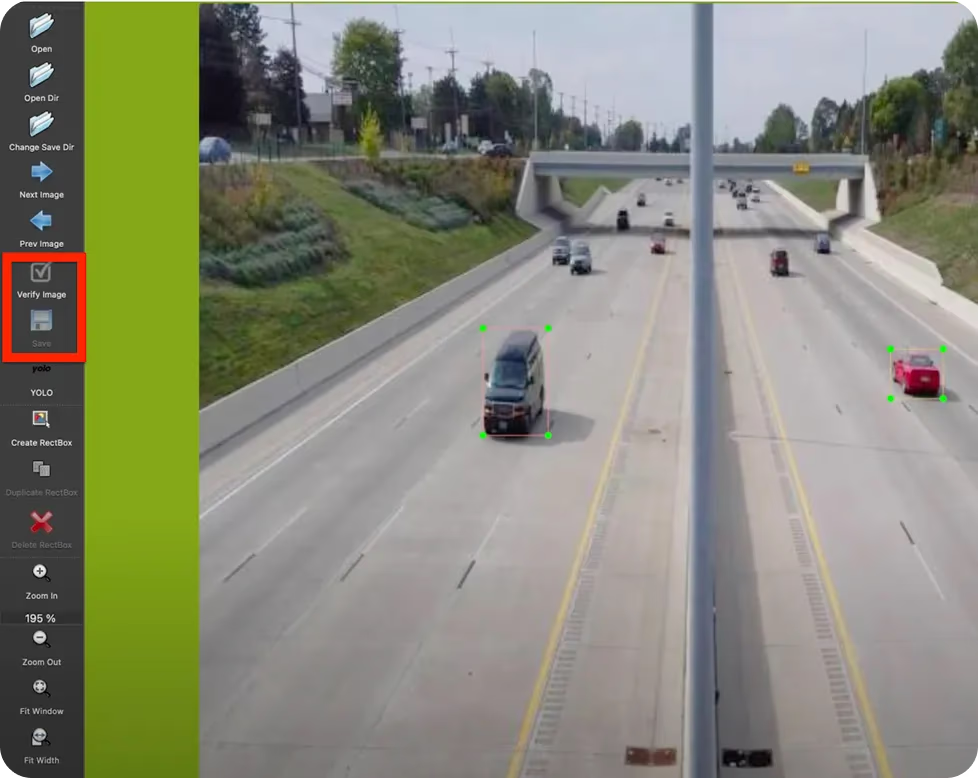
Fig 8. 어노테이션된 이미지 저장 예시.
Link to this sectionYOLO11 모델 학습 워크플로우#
YOLO11 학습을 시작하기 전에 이미지와 라벨을 정리합니다. 먼저 "train"과 "valid"라는 이름의 두 폴더를 만듭니다. 이 폴더들 사이에 이미지를 나눕니다. 각각의 내부에 이미지와 해당 라벨 파일(텍스트 형식)을 위한 별도의 하위 폴더를 만듭니다. 아래와 같습니다.
Fig 9. 이미지 및 라벨 폴더 생성 예시.
그런 다음 다음과 같이 YOLO11 모델 학습을 시작할 수 있습니다:
- 1단계: Ultralytics Python package를 설치합니다. 터미널에서 “pip install ultralytics” 명령어를 실행하여 수행할 수 있습니다. 설치 중 문제가 발생하면, troubleshooting guide에서 해결을 위한 팁과 요령을 확인하십시오.
- 2단계: 패키지 설치가 완료되면 ‘data.yaml’이라는 이름의 파일을 만듭니다. 이는 모델 학습에 매우 중요한 설정 파일입니다. data.yaml 파일에 학습 데이터셋 경로, 검증 데이터셋 경로, 클래스 수(nc), 클래스 이름 리스트(names) 등 아래와 같은 정보를 포함하십시오.

Fig 10. data.yaml 파일 예시.
- 3단계: ‘data.yaml’ 파일이 구성되면 다음 Python 코드를 사용하여 모델 학습을 시작할 수 있습니다. 이 코드는 사전 학습된 YOLO11 모델을 로드하고 설정에 따라 학습합니다.
from ultralytics import YOLO
# Load a YOLO11 model
model = YOLO("yolo11n.pt") # choose your model, e.g., YOLO11 nano
# Train the model with your data and settings
model.train(data="data.yaml", epochs=100, imgsz=640)- 4단계: 학습이 완료되면 아래와 유사한 출력이 표시됩니다. 이는 드론 기반 애플리케이션을 위해 YOLO11 모델을 성공적으로 학습시켰음을 의미합니다.
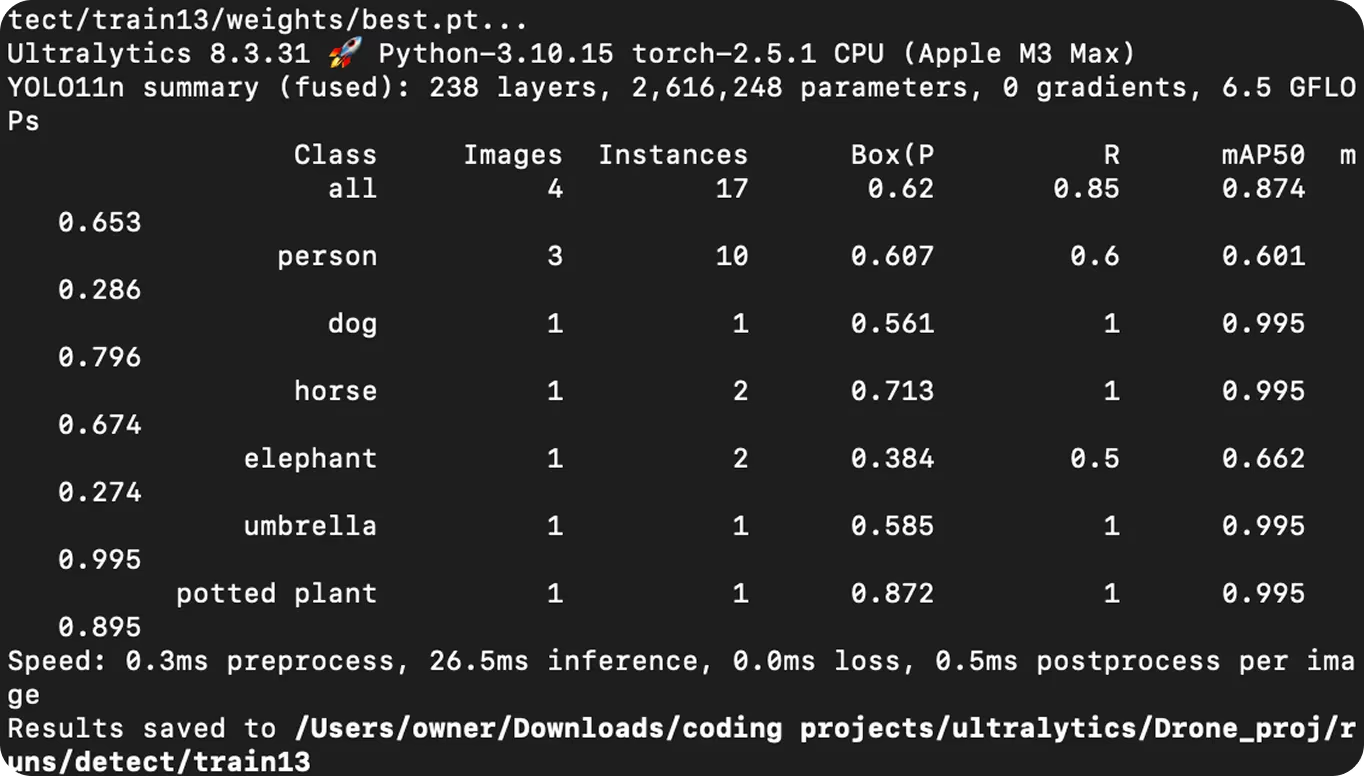
Fig 11. 모델 학습 후 표시되는 출력.
Link to this section드론에서 Ultralytics YOLO11을 사용한 예측 실행하기#
학습된 YOLO11 모델은 이제 inferencing이라는 과정을 통해 예측을 수행하는 데 사용할 수 있습니다. 추론은 학습 중에 배운 내용을 바탕으로 새롭고 보지 못한 데이터를 분석하기 위해 모델을 사용하는 것을 포함합니다. 이 경우 모델은 이미지나 비디오에서 특정 객체(예: 주택) 주위에 바운딩 박스를 그려 해당 객체를 찾고 라벨을 지정하는 데 사용할 수 있습니다.
예측을 실행하려면 다음 Python 코드를 사용하여 입력 비디오에서 학습된 YOLO11 모델을 사용할 수 있습니다. 이 예제에서는 학습에 사용된 것과 동일한 인공 드론 영상을 사용하지만, 원한다면 다른 비디오 파일을 사용할 수도 있습니다.
# Import library
from ultralytics import YOLO
# Load the YOLO model
model = YOLO("best.pt") # Choose your custom-trained model
# Predict the results from the model
results = model.predict(source="path/to/original/video.mp4", show=True, save=True)이 코드를 실행하면 예측과 바운딩 박스가 포함된 출력 비디오 파일이 저장됩니다.
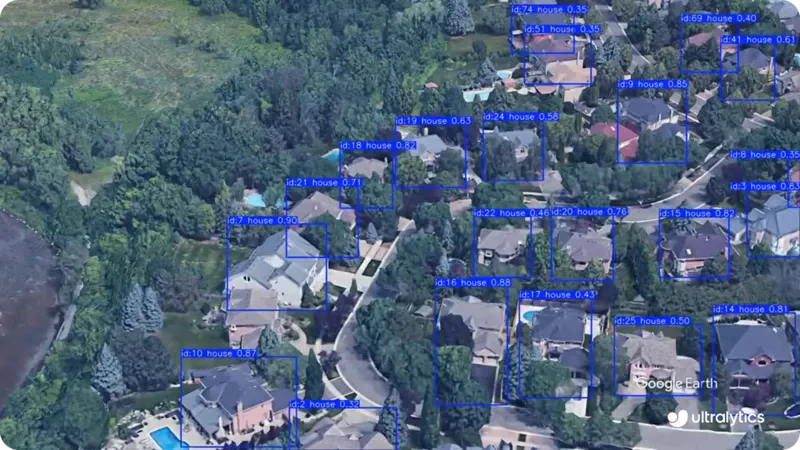
Fig 12. 출력 비디오 파일의 프레임.
Link to this section다양한 애플리케이션을 위한 드론에 Ultralytics YOLO11 통합하기#
드론 배송 패키지를 위해 주택을 감지하는 것은 컴퓨터 비전과 YOLO11이 적용될 수 있는 한 가지 예일 뿐입니다. 컴퓨터 비전, YOLO11 및 항공 드론의 다른 실제 사용 사례는 다음과 같습니다:
-
감시 및 보안: AI drones은 대규모 지역을 실시간으로 모니터링하는 데 사용할 수 있습니다. 침입을 감지하고, 의심스러운 활동을 추적하며, 국경 및 대규모 공공 행사에서 보안을 강화할 수 있습니다.
-
재난 대응 및 수색 및 구조: 열화상 카메라와 객체 감지 기능을 갖춘 드론은 재난 지역에서 생존자를 찾는 데 도움을 줄 수 있습니다. 또한 피해를 평가하고 비상 물품을 배달할 수 있습니다.
-
농업 및 정밀 농업: 컴퓨터 비전이 통합된 드론은 작물 상태를 분석하고 질병을 감지하는 데 사용할 수 있어 농부들이 비용을 절감하면서 수확량을 늘리는 데 도움을 줍니다.
-
매핑 및 지리 공간 분석: 고해상도 3D 지도를 수집함으로써 AI 드론은 도시 계획 및 토지 측량을 지원할 수 있습니다. 기존 방식보다 더 빠르고 정확한 지형 평가를 제공합니다.
Link to this section핵심 요약#
컴퓨터 비전으로 구동되는 AI 드론은 패키지 배송부터 긴급 상황 및 농업 지원에 이르기까지 많은 산업을 변화시키고 있습니다. 이 가이드에서는 인공 드론 영상을 만들고, 객체에 라벨을 지정하며, YOLO11을 학습시키고, 이를 사용하여 주택을 감지하는 과정을 살펴보았습니다.
드론 영상에 객체 감지를 적용하면 드론이 더 스마트해져서 실시간으로 객체를 자동으로 인식하고 추적할 수 있습니다. 기술이 발전함에 따라 AI 기반 드론은 배송 속도를 높이고, 보안을 개선하며, 재난 대응을 지원하는 데 더욱 큰 역할을 할 것입니다.
our community에 가입하고 GitHub repository를 탐색하여 비전 AI에 대해 자세히 알아보세요. 또한 컴퓨터 비전 프로젝트를 시작하려면 our licensing options을 확인하세요. AI in manufacturing 또는 computer vision in the automotive 산업과 같은 혁신에 관심이 있으십니까? 당사의 솔루션 페이지를 방문하여 자세히 알아보세요.






