Robotics
Esplora come l'AI e la computer vision alimentano la robotica moderna. Impara a distribuire Ultralytics YOLO26 per la percezione in tempo reale, l'autonomia e l'automazione intelligente.
La robotica è un campo interdisciplinare situato alla convergenza di ingegneria, informatica e tecnologia, dedicato alla progettazione, alla costruzione e al funzionamento di macchine programmabili note come robot. Mentre la robotica tradizionale si concentrava su compiti meccanici ripetitivi e pre-programmati, il panorama moderno è stato radicalmente trasformato dall'integrazione di Intelligenza Artificiale (AI) e Machine Learning (ML). Questa sinergia consente alle macchine di percepire il proprio ambiente attraverso i sensori, prendere decisioni autonome e imparare dalle interazioni, evolvendo da rigidi strumenti di automazione in agenti intelligenti capaci di navigare in scenari complessi e non strutturati del mondo reale.
Link to this sectionPercezione e autonomia nella robotica#
Affinché un robot possa operare efficacemente al di fuori di un ambiente controllato, deve possedere la "percezione", ovvero la capacità di interpretare i dati sensoriali. La Computer Vision (CV) funge da modalità sensoriale principale, elaborando input visivi provenienti da telecamere, LiDAR e sensori di profondità. Modelli avanzati di deep learning (DL) consentono ai robot di identificare ostacoli, leggere segnali o ispezionare prodotti. Tecnologie come Ultralytics YOLO26 sono fondamentali in questo settore, offrendo l'object detection ad alta velocità necessaria per una reattività in tempo reale su hardware embedded come la piattaforma NVIDIA Jetson.
Le principali capacità di ML che guidano l'autonomia robotica includono:
- Localizzazione e mappatura: Algoritmi come la Simultaneous Localization and Mapping (SLAM) consentono a un robot di costruire una mappa di un ambiente sconosciuto monitorando al contempo la propria posizione al suo interno.
- Manipolazione: Una precisa pose estimation consente ai bracci robotici di determinare l'orientamento degli oggetti, facilitando compiti complessi come l'afferrare oggetti irregolari o il prelievo da contenitori (bin picking).
- Processo decisionale: Attraverso il Reinforcement Learning, gli agenti apprendono strategie ottimali interagendo con il proprio ambiente e ricevendo segnali di ricompensa, un metodo sperimentato da gruppi di ricerca come Google DeepMind.
Link to this sectionApplicazioni nel mondo reale#
L'applicazione della robotica intelligente sta rimodellando diversi settori migliorando l'efficienza e la sicurezza.
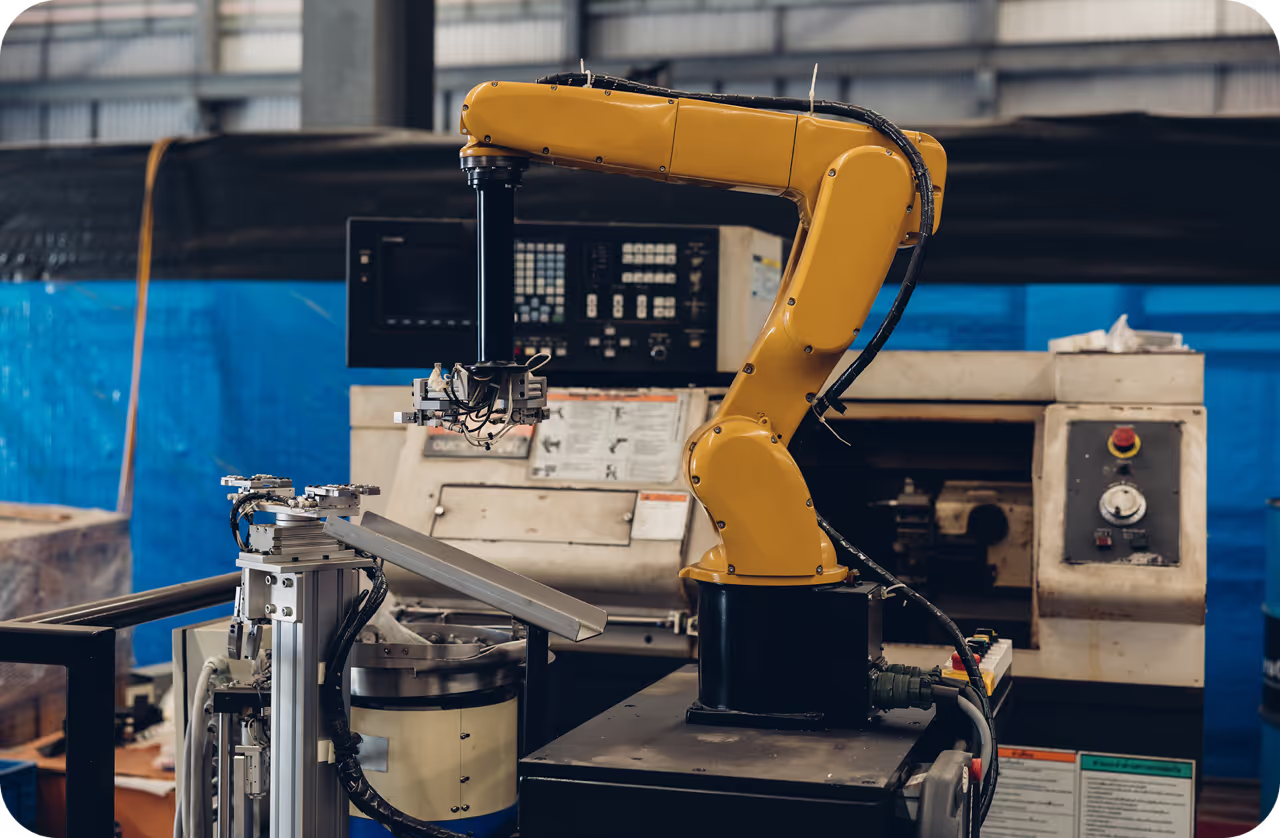
Link to this sectionAutomazione industriale e produzione#
Nel paradigma dell'Industria 4.0, i "cobot" (robot collaborativi) lavorano a fianco degli esseri umani. Impiegando l'AI nella produzione, questi sistemi utilizzano l'image segmentation per identificare difetti microscopici sulle linee di assemblaggio che gli ispettori umani potrebbero non notare. La International Federation of Robotics (IFR) riporta un aumento significativo della densità di questi sistemi automatizzati intelligenti a livello globale.
Link to this sectionRobot mobili autonomi (AMR) nella logistica#
I magazzini utilizzano AMR per trasportare merci senza infrastrutture fisse. A differenza dei vecchi Automated Guided Vehicles (AGV) che seguivano nastri magnetici, gli AMR utilizzano la navigazione autonoma basata sull'Edge AI per ricalcolare dinamicamente il percorso attorno agli ostacoli. Questa capacità è centrale per la moderna AI nella logistica, ottimizzando il throughput della catena di approvvigionamento.
Link to this sectionRobotica vs. Robotic Process Automation (RPA)#
È fondamentale distinguere la robotica fisica dalla Robotic Process Automation (RPA), poiché la terminologia spesso si sovrappone nei contesti aziendali.
- La robotica si occupa di hardware fisico che interagisce con il mondo reale (ad esempio, un robot Spot di Boston Dynamics che ispeziona un cantiere edile).
- La RPA si riferisce a bot software che automatizzano processi aziendali digitali e ripetitivi (ad esempio, lo scraping di dati da moduli web o l'elaborazione di fatture).
Sebbene entrambi mirino ad aumentare l'automazione, la robotica manipola atomi, mentre la RPA manipola bit.
Link to this sectionImplementazione della visione per il controllo robotico#
Distribuire modelli di visione sui robot richiede spesso l'ottimizzazione per una bassa inference latency per garantire la sicurezza. Middleware come il Robot Operating System (ROS) è comunemente utilizzato per colmare il divario tra algoritmi di visione e attuatori hardware. Prima del deployment, gli sviluppatori utilizzano spesso la piattaforma Ultralytics per annotare dataset specializzati e gestire il ciclo di vita dell'addestramento nel cloud.
L'esempio seguente dimostra come uno script Python potrebbe utilizzare un modello di visione per rilevare persone in un feed video, un requisito di sicurezza comune per i robot mobili:
from ultralytics import YOLO
# Load a lightweight YOLO26 model optimized for edge devices
model = YOLO("yolo26n.pt")
# Process a live camera feed (source=0) with a generator for efficiency
results = model.predict(source=0, stream=True)
for result in results:
# Check if a person (class index 0) is detected with high confidence
if result.boxes.conf.numel() > 0 and 0 in result.boxes.cls:
print("Person detected! Triggering stop command.")
# robot.stop() # Hypothetical hardware interface callLink to this sectionProspettive Future#
Il campo sta virando verso robot multiuso capaci di eseguire più attività, piuttosto che macchine specializzate con una singola funzione. Le innovazioni nei foundation models stanno consentendo ai robot di comprendere istruzioni in linguaggio naturale, rendendoli accessibili a utenti non tecnici. Inoltre, i progressi dell'AI nell'agricoltura stanno portando a flotte agricole completamente autonome in grado di diserbare, seminare e raccogliere con precisione, riducendo l'uso di prodotti chimici e i costi del lavoro. La ricerca da parte di istituzioni come il MIT Computer Science and Artificial Intelligence Laboratory continua a spingere i confini della soft robotics e dell'interazione uomo-robot.