3D物体検出とそのアプリケーションの理解
2Dおよび3D物体検出の仕組み、主な違い、そして自動運転車、ロボティクス、拡張現実などの分野におけるその応用を探ります。

長年にわたり、オブジェクト検出はますます高度化してきました。単純な2次元(2D)画像内のオブジェクト認識から、私たちの周囲にある複雑な3次元(3D)世界でのオブジェクト特定へと進化を遂げてきました。1970年代に開発されたテンプレートマッチングのような初期の技術は、画像の一部と保存された参照画像を比較してオブジェクトを見つけるというもので、2Dオブジェクト検出の基礎となりました。1990年代には、LIDAR(光検出と測距)のような技術が登場し、システムが深度や空間情報をより容易に取得できるようになりました。今日では、2D画像と3Dデータを組み合わせるマルチモーダル融合手法が、高精度な3Dオブジェクト検出システムへの道を切り拓いています。
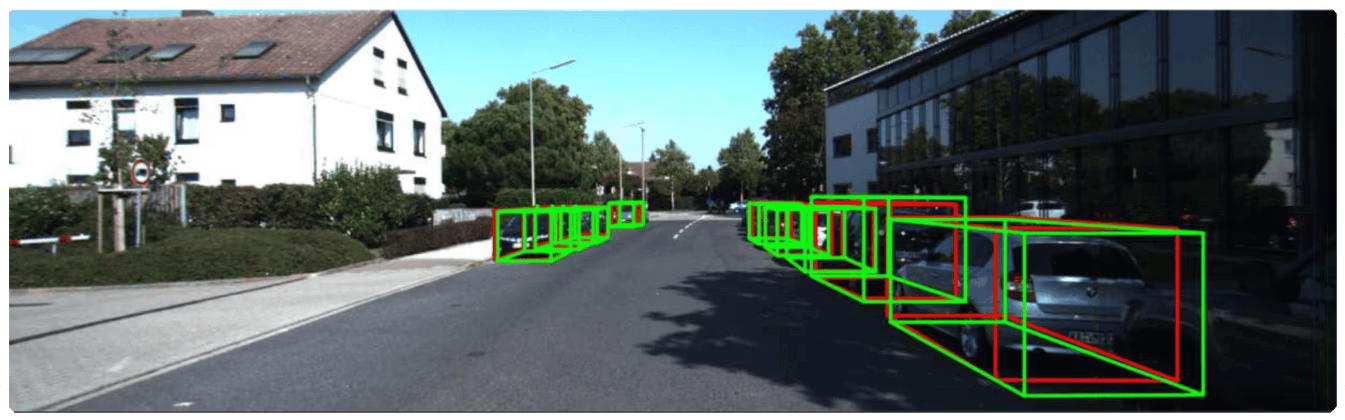
図1。3Dオブジェクト検出の例。
本記事では、3Dオブジェクト検出とは何か、どのように機能するのか、そして2Dオブジェクト検出とどのように異なるのかを解説します。また、3Dオブジェクト検出の応用例についても議論します。それでは始めましょう!
Link to this section2Dオブジェクト検出の概要#
3Dオブジェクト検出を見る前に、2Dオブジェクト検出がどのように機能するかを理解しておきましょう。2Dオブジェクト検出は、コンピュータが平坦な2次元画像内のオブジェクトを認識して特定することを可能にするコンピュータビジョン技術です。これは、写真の中のオブジェクトの水平(X)および垂直(Y)位置を分析することで機能します。例えば、サッカー場の選手の画像をUltralytics YOLOv8のような2Dオブジェクト検出モデルに渡すと、モデルは画像を分析し、各オブジェクト(この場合は選手)の周囲にバウンディングボックスを描画して、その位置を正確に特定できます。
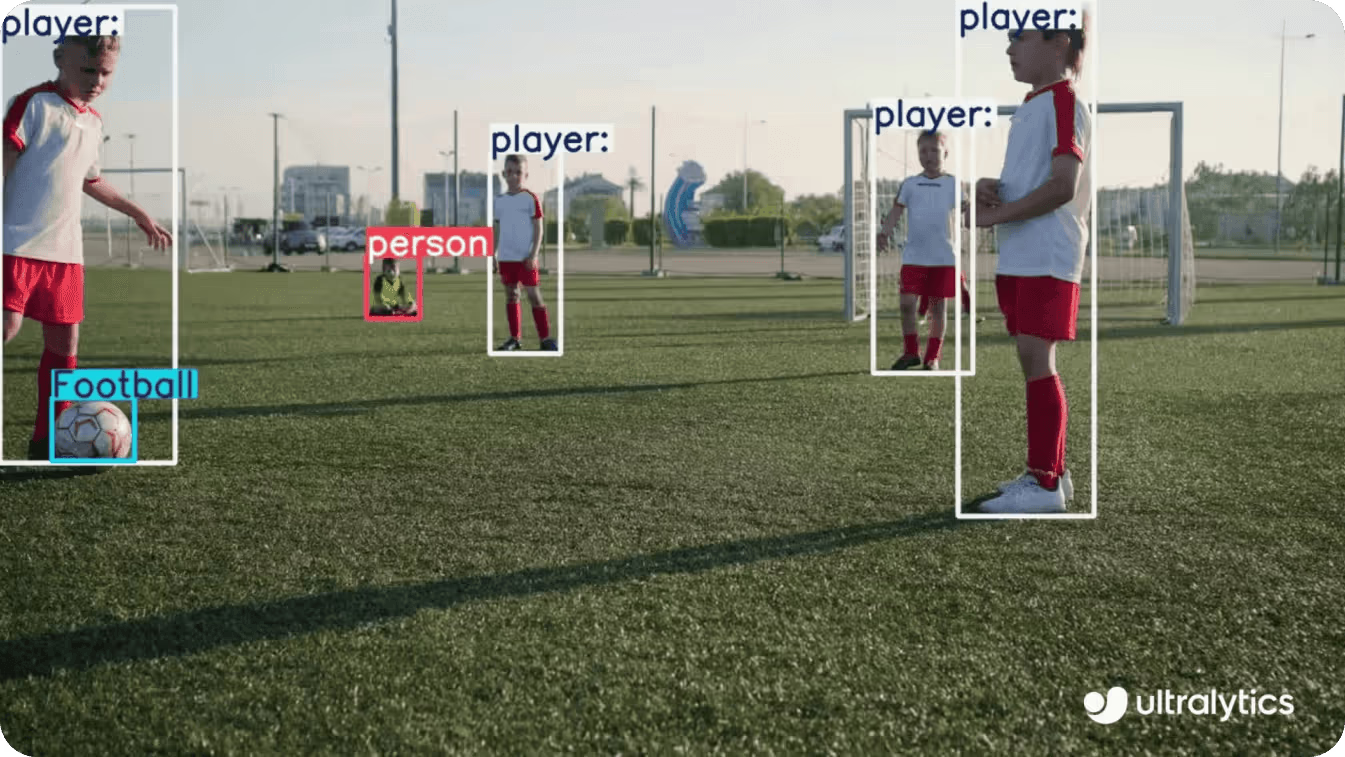
図2。 サッカー場の選手を検出するために使用されているYOLOv8 2Dオブジェクト検出。
しかし、2Dオブジェクト検出には限界があります。2次元しか考慮しないため、深度を理解できません。そのため、オブジェクトまでの距離や大きさを判断するのが難しい場合があります。例えば、遠くにある大きなオブジェクトが、近くにある小さなオブジェクトと同じサイズに見えてしまい、混乱を招くことがあります。深度情報の欠如は、オブジェクトの正確なサイズや距離を知る必要があるロボティクスや拡張現実といったアプリケーションにおいて、不正確さの原因となる可能性があります。そこで3Dオブジェクト検出の必要性が生じます。
Link to this section3Dオブジェクト検出による空間認識の向上#
3D オブジェクト検出は、コンピュータが3次元空間内のオブジェクトを識別できるようにする高度なコンピュータビジョン技術であり、周囲の世界をより深く理解させることができます。2Dオブジェクト検出とは異なり、3Dオブジェクト検出は深度データも考慮に入れます。深度情報は、オブジェクトがどこにあるか、どのくらいの大きさか、どのくらい離れているか、実際の3D空間内でどのように配置されているかといった、より詳細な情報を提供します。興味深いことに、3D検出は一方のオブジェクトが他方を部分的に隠す状況(オクルージョン)にもよりうまく対応でき、視点が変化しても信頼性を維持できます。これは、正確な空間認識を必要とするユースケースにとって強力なツールです。
3Dオブジェクト検出は、自動運転車、ロボティクス、拡張現実システムなどのアプリケーションにとって不可欠です。LiDARやステレオカメラなどのセンサーを使用して機能します。これらのセンサーは、点群または深度マップとして知られる環境の詳細な3Dマップを作成します。これらのマップを分析することで、3D環境内のオブジェクトが検出されます。
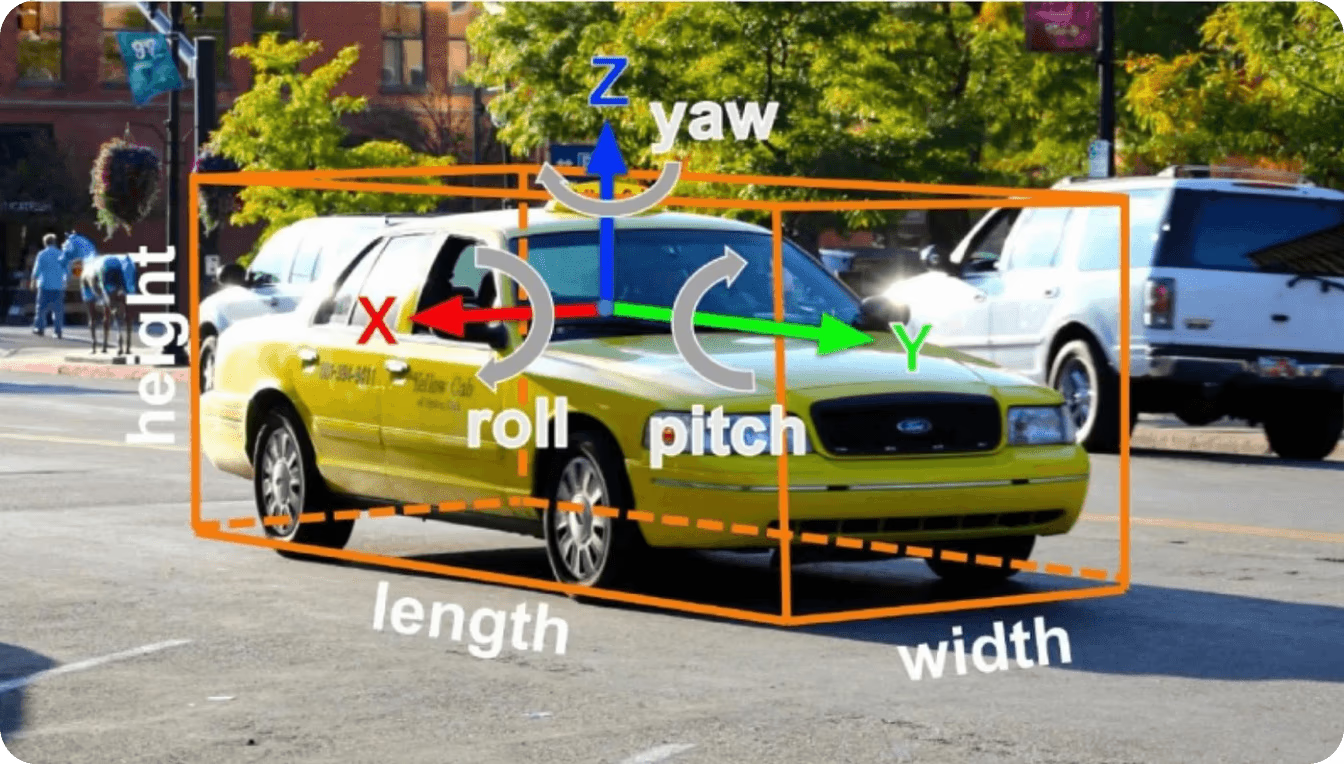
図3。車の3Dオブジェクト検出。
点群のような3Dデータを扱うために特別に設計された高度なコンピュータビジョンモデルが多数存在します。例えば、VoteNetは、ハフ投票法を用いて点群内のオブジェクトの中心位置を予測するモデルであり、オブジェクトを正確に検出し分類することを容易にします。同様に、VoxelNetは、点群をボクセルと呼ばれる小さな立方体のグリッドに変換してデータ分析を簡素化するモデルです。
Link to this section2Dオブジェクト検出と3Dオブジェクト検出の主な違い#
2Dと3Dのオブジェクト検出を理解したところで、その主な違いを探ってみましょう。3Dオブジェクト検出は、点群を扱うため2Dオブジェクト検出よりも複雑です。LiDARによって生成された点群のような3Dデータを分析するには、はるかに多くのメモリと計算能力が必要です。もう一つの違いは、関与するアルゴリズムの複雑さです。3Dオブジェクト検出モデルは、深度推定、3D形状分析、およびオブジェクトの向きの分析を処理できるように、より複雑である必要があります。
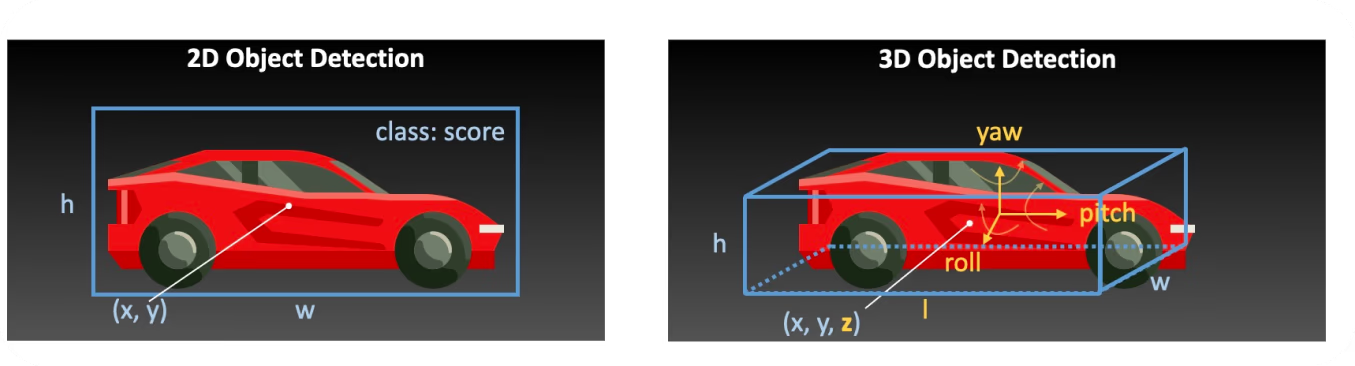
図4。2Dと3Dオブジェクト検出の比較。
3D object detection models involve heavier mathematical and computational work than 2D object detection models. Processing 3D data in real-time can be challenging without advanced hardware and optimizations. However, these differences make 3D object detection more suited for applications requiring better spatial understanding. On the other hand, 2D object detection is often used for simpler applications like security systems that need image recognition or video analysis.
Link to this section3Dオブジェクト検出の長所と短所#
3Dオブジェクト検出は、従来の2Dオブジェクト検出手法とは一線を画すいくつかの利点を提供します。オブジェクトの3次元すべてを捉えることで、現実世界に対するその位置、サイズ、および向きに関する正確な詳細を提供します。このような精度は、自動運転車のようなアプリケーションでは、障害物の正確な位置を知ることが安全のために不可欠であるため、非常に重要です。3Dオブジェクト検出を使用するもう一つの利点は、3D空間内でのさまざまなオブジェクト間の関係をよりよく理解するのに役立つことです。
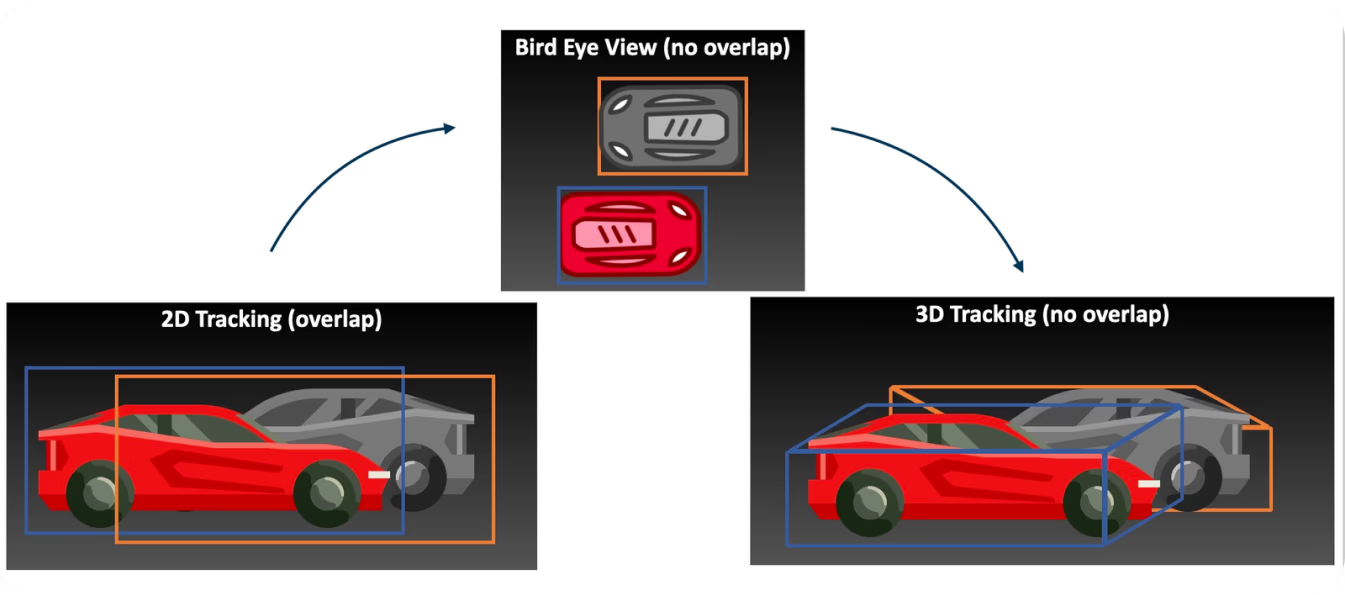
図5。 3Dオブジェクト検出によるオクルージョンの解決。
多くの利点があるにもかかわらず、3Dオブジェクト検出に関連する制限もあります。留意すべき主な課題は以下の通りです:
- より高い計算コスト: 3Dデータを扱うにはより強力なハードウェアリソースが必要であり、コストがすぐに嵩む可能性があります。
- より複雑なデータ要件: 3Dオブジェクト検出は、多くの場合LiDARのような高度なセンサーに依存していますが、これらは高価であり、すべての環境で利用できるとは限りません。
- データの収集と処理: 3Dオブジェクト検出の複雑なデータ要件により、モデルのトレーニングに必要な大規模なデータセットを収集、準備、処理することは、時間とリソースの両方を消費するものとなります。
- モデルの複雑さの増大: 3Dオブジェクト検出に使用されるモデルは、一般的に2Dオブジェクト検出に使用されるものよりも複雑で、より多くのレイヤーとパラメータを持っています。
Link to this section3Dオブジェクト検出の応用#
3Dオブジェクト検出の長所と短所について議論しましたので、次に3Dオブジェクト検出のユースケースを詳しく見ていきましょう。
Link to this section自動運転車#
自動運転車において、3Dオブジェクト検出は車の周囲を認識するために不可欠です。これにより、車両は歩行者、他の車、障害物を検出できます。また、現実世界での位置、サイズ、向きに関する正確な情報も提供します。3Dオブジェクト検出システムを通じて得られる詳細なデータは、乗客にとってより安全な自動運転体験に役立ちます。
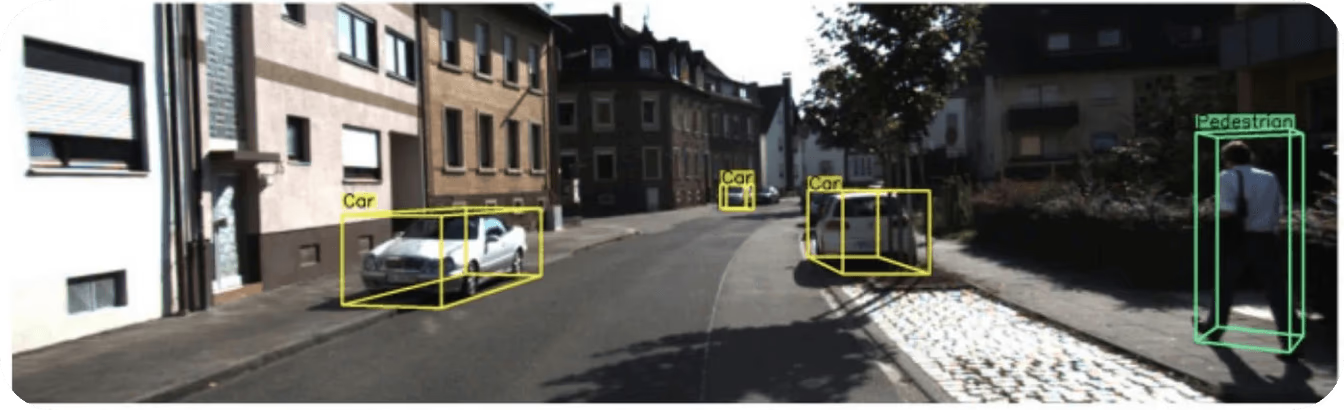
図6。自動運転車における3Dオブジェクト検出の利用。(ソース: towardsdatascience.com)
Link to this sectionロボティクス#
ロボットシステムは、いくつかのアプリケーションで3Dオブジェクト検出を使用しています。それらは、さまざまなタイプの環境をナビゲートしたり、オブジェクトをピックアップして配置したり、周囲と対話したりするために使用します。このようなユースケースは、倉庫や製造施設のような動的な環境で特に重要であり、ロボットが効果的に機能するためには3次元レイアウトを理解する必要があります。
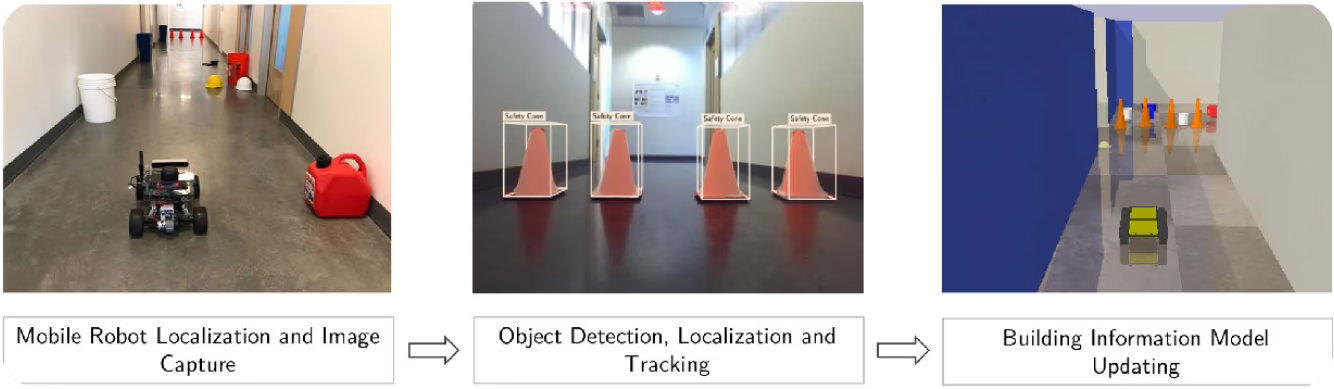
図7。3Dオブジェクト検出を使用するモバイルロボット。
Link to this section拡張現実および仮想現実(AR/VR)#
3Dオブジェクト検出のもう一つの興味深いユースケースは、拡張現実および仮想現実アプリケーションです。3Dオブジェクト検出は、仮想オブジェクトを現実的なVRまたはAR環境に正確に配置するために使用されます。そうすることで、そのような技術の全体的なユーザーエクスペリエンスが向上します。また、VR/ARシステムが物理的なオブジェクトを認識および追跡することを可能にし、デジタル要素と物理的要素がシームレスに相互作用する没入型環境を作成します。例えば、AR/VRヘッドセットを使用するゲーマーは、3Dオブジェクト検出の助けを借りて、より没入感のある体験を得ることができます。これにより、3D空間内の仮想オブジェクトとのやり取りがはるかに魅力的になります。
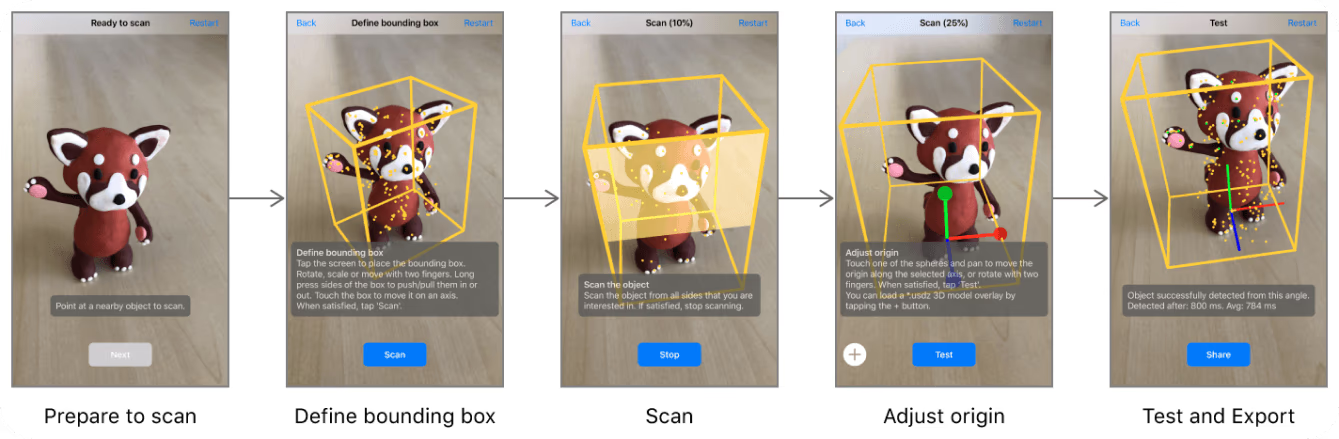
図8。 ARアプリケーションに使用される3Dオブジェクト認識の例。
Link to this section3Dオブジェクト検出に関する最終的な考察#
3Dオブジェクト検出は、2Dオブジェクト検出手法よりも効果的に深度と空間を理解することを可能にします。オブジェクトのサイズ、距離、位置を知ることが重要な自動運転車、ロボット、AR/VRなどのアプリケーションで重要な役割を果たします。3Dオブジェクト検出にはより多くの処理能力と複雑なデータが必要ですが、正確で詳細な情報を提供する能力があるため、多くの分野で非常に価値のあるツールとなっています。技術の進歩に伴い、3Dオブジェクト検出の効率性とアクセシビリティは向上する可能性が高く、さまざまな業界でより広範な採用とイノベーションへの道が切り拓かれるでしょう。
AIの最新情報については、当社のコミュニティとつながってください!GitHubリポジトリにアクセスして、製造業や医療などの業界でAIを使用して最先端のソリューションをどのように作成しているかをご確認ください。🚀






