Руководство по калибровке камеры для компьютерного зрения в 2025 году
Узнай, как калибровка камеры улучшает Vision AI за счет коррекции искажений, повышения точности оценки глубины и повышения общей точности в различных задачах компьютерного зрения.

Камеры видят мир не так, как люди. Зачастую они создают изображения с искажениями и сдвигами перспективы, что может повлиять на точность моделей ИИ. Калибровка камеры позволяет исправить эти искажения и убедиться, что модели компьютерного зрения воспринимают объекты такими, какие они есть в реальности. Этот процесс включает в себя устранение дисторсии объектива, настройку фокусного расстояния и выравнивание сенсоров, чтобы камеры получали точные изображения.
В частности, точная калибровка камеры является ключом к правильной оценке глубины и измерению расстояний. Моделям компьютерного зрения, таким как Ultralytics YOLO11, необходимы хорошо откалиброванные входные данные для выполнения различных задач, таких как обнаружение объектов и оценка позы. Без правильных входных изображений производительность модели может снизиться, что приведет к ошибкам в реальных приложениях.
Различные методы калибровки камеры, от традиционных шахматных шаблонов до современных методов на базе ИИ, помогают повысить точность. Например, трехмерная (3D) калибровка помогает моделям понимать глубину, а матрица калибровки преобразует координаты реального мира в пространство изображения для большей точности.
В этом руководстве мы рассмотрим основы калибровки камеры для компьютерного зрения, включая ключевые параметры, различные методы и оптимизацию для реальных приложений ИИ.
Link to this sectionВажность калибровки камеры в компьютерном зрении#
Калибровка камеры используется для настройки параметров камеры, чтобы изображения точно соответствовали измерениям реального мира. Она гарантирует, что объекты на изображении отображаются в нужном положении, размере и пропорциях, предотвращая искажения, которые могут ввести в заблуждение модели ИИ.
Без надлежащей калибровки камеры могут вызывать дисторсию, из-за которой объекты выглядят растянутыми или смещенными. Это влияет на точность обнаружения объектов, трекинга и оценки глубины, приводя к ошибкам в приложениях на базе ИИ. В частности, такие модели, как YOLO11, работают эффективнее, когда входные данные правильно откалиброваны, что снижает ошибки в пространственной интерпретации и улучшает принятие решений в реальных условиях.
Точная калибровка особенно важна для дронов, беспилотных автомобилей и систем машинного зрения роботов. Несоосность в этих системах может привести к неверным расчетам расстояний, что сказывается на задачах навигации и обнаружения препятствий.
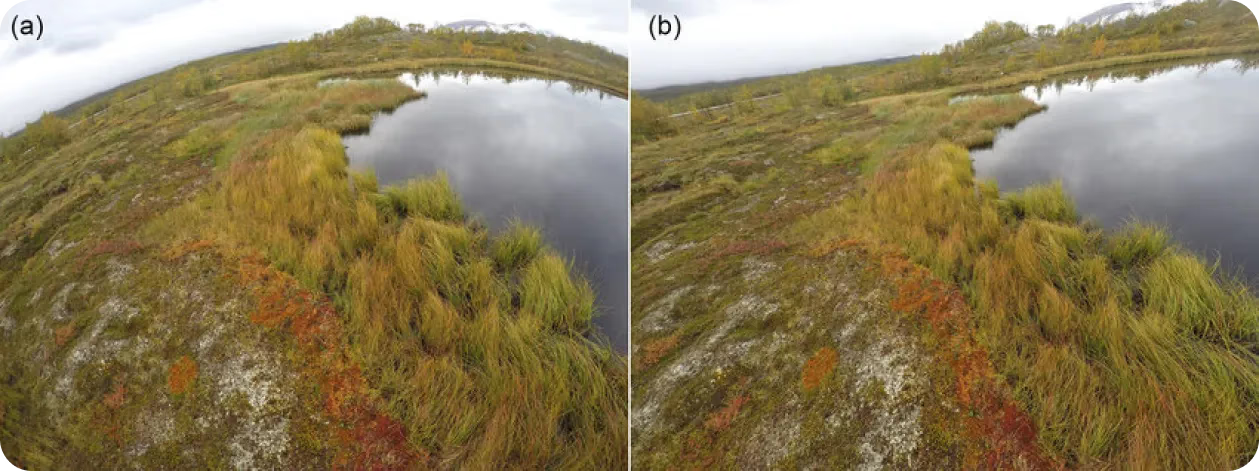
Рис 1. Пример дисторсии объектива (слева), исправленной с помощью калибровки камеры (справа).
Link to this sectionИзучение эффектов дисторсии объектива#
Дисторсия объектива может привести к тому, что камера искажает форму и положение объектов на изображении. Вот несколько примеров различных типов дисторсии:
- Бочкообразная дисторсия: прямые линии кажутся изогнутыми наружу, из-за чего объекты в центре изображения выглядят выпуклыми. Это часто встречается в широкоугольных объективах и может нарушить 3D-калибровку в автономных системах, искажая восприятие глубины.
- Подушкообразная дисторсия: в этом случае прямые линии изгибаются внутрь к центру изображения, создавая эффект, противоположный бочкообразной дисторсии.
- Дисторсия «усы»: возникает при сочетании бочкообразной и подушкообразной дисторсии, из-за чего прямые линии изгибаются волнообразно.
- Хроматическая аберрация: происходит, когда объектив не может сфокусировать цвета в одной точке, создавая цветные ореолы вокруг объектов.
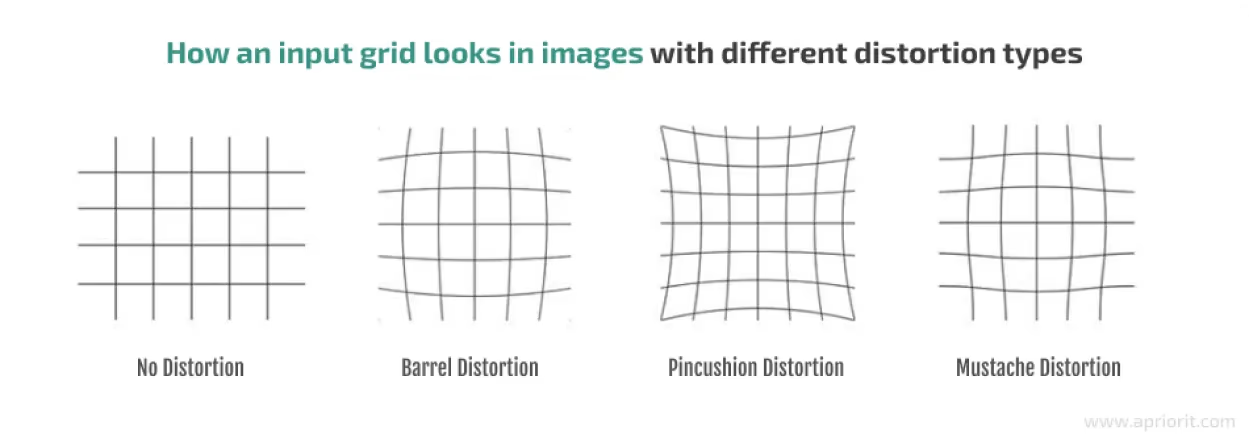
Рис 2. Различные типы дисторсии объектива.
Link to this sectionТипы калибровки камеры#
Калибровка камеры состоит из двух ключевых компонентов: внутренних параметров, которые определяют внутренние характеристики камеры, и внешних параметров, которые определяют ее положение и ориентацию относительно окружающего мира. Давай рассмотрим оба типа компонентов подробнее.
Link to this sectionВнутренние параметры#
Точная внутренняя калибровка может улучшить прогнозы моделей, гарантируя, что обнаруженные объекты отображаются в правильном положении и масштабе в реальных приложениях. Вот краткий обзор нескольких внутренних параметров:
- Фокусное расстояние: оно определяет, как камера проецирует 3D-объекты на 2D-изображение. При неправильной калибровке объекты могут казаться растянутыми или сжатыми, что меняет их воспринимаемый размер и расстояние.
- Главная точка: представляет собой оптический центр сенсора камеры. Если она смещена, это может привести к сдвигу всего изображения, что повлечет за собой ошибки в позиционировании объектов.
- Коэффициент перекоса: учитывает непрямоугольное расположение пикселей на сенсоре. При наличии перекоса изображение может казаться наклоненным или деформированным вместо правильного выравнивания.
- Коэффициенты дисторсии: эти параметры корректируют оптические искажения, вызванные объективом. Без коррекции прямые линии могут казаться изогнутыми, особенно у краев изображения.
Link to this sectionВнешние параметры#
Внешняя калибровка определяет положение и ориентацию камеры относительно реального мира, что особенно важно в многокамерных системах, используемых для 3D-калибровки, отслеживания объектов и восприятия глубины. Она помогает дронам, беспилотным автомобилям и системам наблюдения точно интерпретировать пространственные отношения.
Вот два ключевых внешних параметра:
- Матрица трансляции: определяет физическое местоположение камеры в 3D-пространстве, указывая ее позицию по осям X, Y и Z. При неправильной калибровке объекты могут казаться ближе или дальше, чем они есть на самом деле, что приведет к неточным измерениям расстояния. В беспилотных автомобилях это может привести к плохому обнаружению препятствий, а в робототехнике — к ошибкам позиционирования при манипуляциях с объектами.
- Матрица вращения: определяет ориентацию камеры, указывая, насколько она наклонена, повернута или развернута относительно опорной точки. Если откалибровать ее неверно, изображения с нескольких камер не будут правильно выравниваться, что создаст проблемы при 3D-реконструкции, многокамерном трекинге и пространственном картографировании. Например, в беспилотном автомобиле неверная матрица вращения может вызвать смещение данных сенсоров, что приведет к неточному обнаружению полосы движения.
Link to this sectionЗнакомство с матрицей калибровки камеры#
Каждое изображение, полученное камерой, является 2D-представлением 3D-мира. Моделям ИИ нужен способ переводить данные между этими измерениями для точных прогнозов. Именно здесь на сцену выходит матрица калибровки камеры. Она проецирует точки реального мира на плоскость изображения камеры, чтобы объекты отображались правильно.
Проще говоря, матрица калибровки камеры — это математическая модель, представляющая внутренние параметры камеры. Обычно она хранится в системах машинного зрения и используется в алгоритмах обработки изображений для исправления искажений и проецирования 3D-точек в 2D-координаты.
Как мы увидим далее, матрица вычисляется с использованием методов калибровки, таких как обнаружение шахматного шаблона, калибровка на основе 3D-объектов и самокалибровка на базе ИИ, которые оценивают ключевые параметры путем анализа изображений известных опорных точек.
Link to this sectionРазличные методы калибровки камеры#
Существует множество методов калибровки камеры, каждый из которых подходит для определенных задач. Традиционные методы основаны на физических шаблонах, в то время как методы на базе ИИ используют глубокое обучение для автоматизации процесса.
Давай пройдемся по этим методам и изучим, как они повышают точность в различных приложениях.
Link to this sectionТрадиционные методы калибровки камеры#
Один из самых распространенных методов калибровки камеры использует шахматную доску или сетчатый шаблон, помещенный перед камерой. Система обнаруживает ключевые точки на шаблоне для вычисления параметров калибровки.
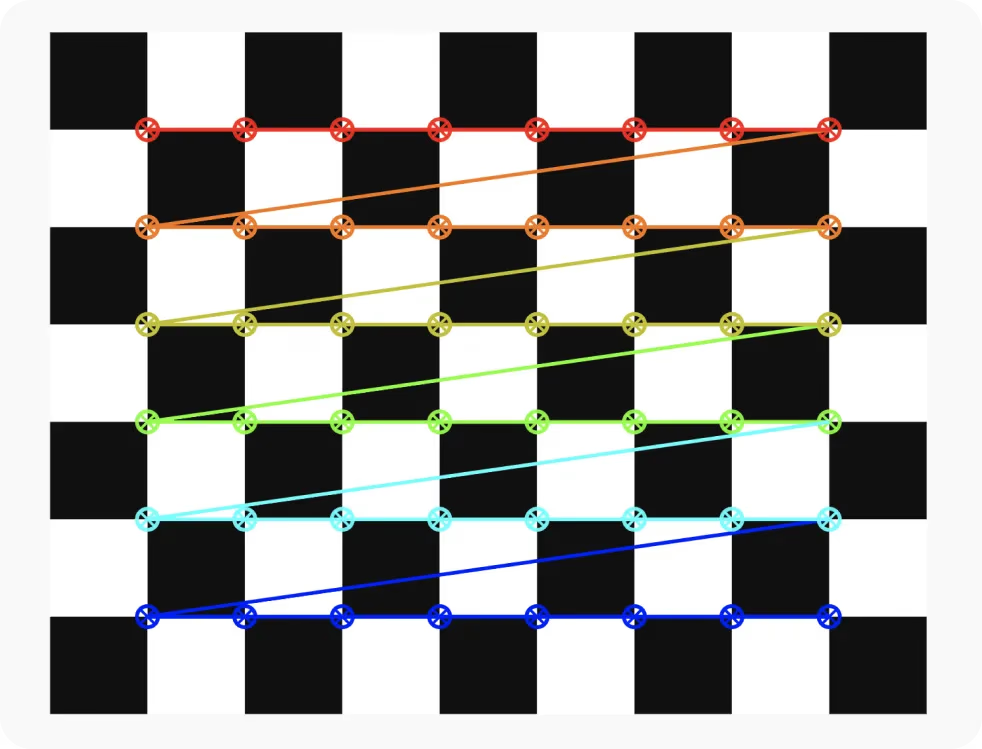
Рис 3. Шахматная доска для калибровки камеры.
Хотя этот метод полезен в контролируемых условиях, он требует ручной настройки и анализа множества изображений с разных ракурсов. Изменения условий освещения или неожиданные движения камеры могут снизить точность, делая повторную калибровку необходимой.
В динамических средах, таких как дроны и беспилотные автомобили, традиционная калибровка не справляется. Движущаяся камера требует частой перекалибровки для поддержания точности, что непрактично со статичными шаблонами. Это ограничение привело к достижениям в области калибровки камер на базе ИИ, предлагающим большую гибкость и автоматизацию.
Link to this sectionМетоды калибровки камеры на базе ИИ#
Методы на базе ИИ автоматизируют калибровку камеры, используя модели глубокого обучения для самокалибровки, что избавляет от необходимости ручной настройки. Эти методы оценивают внутренние и внешние параметры непосредственно из реальных изображений, исключая необходимость в заранее заданных шаблонах.
Точно так же синтетические наборы данных трансформируют калибровку камеры, предоставляя моделям ИИ разнообразные размеченные тренировочные данные для уточнения параметров и исправления искажений. Эти наборы данных имитируют реальные условия, помогая моделям ИИ учиться динамически настраивать внутренние и внешние параметры без вмешательства человека.
Например, самокалибрующиеся фреймворки используют вероятностные модели и глубокое обучение для анализа монокулярных изображений, оценки 3D-структур и постоянного уточнения калибровки. Синтетические данные улучшают этот процесс, обучая модели справляться с меняющимися перспективами, смещениями сенсоров и условиями освещения, что улучшает оценку глубины, отслеживание препятствий и точность позиционирования в таких приложениях, как автономное вождение и робототехника.

Рис 4. Самокалибрующаяся система машинного зрения, способная распознавать дорожное движение.
Link to this sectionКлючевые области применения калибровки камеры#
Теперь, когда мы понимаем, что такое калибровка камеры, давай изучим ее влияние в различных отраслях.
Link to this sectionАвтономные транспортные средства и навигация дронов#
Для беспилотных автомобилей и автономных дронов точная калибровка камеры важна для безопасной и надежной навигации. Эти системы опираются на оценку глубины и расчет расстояния для обнаружения препятствий, отслеживания дорожной разметки и оценки окружающих объектов. Плохая калибровка может привести к неверной интерпретации расстояния, что приведет к неправильным решениям в реальных сценариях.
Правильно откалиброванная матрица позволяет автономным транспортным средствам объединять входные данные от LiDAR, радаров и камер, улучшая слияние данных с нескольких сенсоров. Это помогает автомобилю точно определять расстояние до пешеходов, границ полос и соседних машин, снижая риск аварий. В свою очередь, в дронах 3D-калибровка помогает поддерживать стабильность высоты и точно отслеживать объекты для навигации в динамических средах.

Рис 5. Откалиброванная камера в беспилотном автомобиле.
Link to this sectionДополненная реальность (AR) и виртуальная реальность (VR)#
Приложения AR и VR полагаются на точную калибровку камеры для совмещения цифрового контента с объектами реального мира. При неправильной калибровке AR-объекты могут смещаться, выглядеть несоосными или иметь неправильный масштаб, что нарушает пользовательский опыт.
Исправление дисторсии объектива является ключом к тому, чтобы виртуальные объекты плавно вписывались в реальное окружение. Без этого искажения могут разрушить эффект погружения и снизить точность в играх, учебных симуляторах и медицинской визуализации. Кроме того, в VR калибровка улучшает отслеживание движений головы и рук, повышая отзывчивость и создавая более плавный и глубокий опыт погружения.

Рис 6. Настройка 3D-калибровки камеры, используемая для уточнения пространственных измерений.
Link to this sectionРоботизированное зрение и промышленная автоматизация#
Для того чтобы роботы могли точно видеть и взаимодействовать с миром, необходима правильная калибровка камеры. В промышленной автоматизации роботы полагаются на оценку глубины для точного захвата, перемещения и манипулирования объектами. Без надлежащей калибровки несоосность может привести к ошибкам при упаковке, сборке и контроле качества.
Одной из ключевых проблем в робототехнике является точное измерение плоских объектов. Калибровка помогает манипуляторам роботов определять точные размеры, предотвращая просчеты, которые могут замедлить или нарушить производство. 3D-калибровка выводит это на новый уровень, позволяя роботам адаптироваться к изменению объектов или их положений.
Link to this sectionОсновные выводы#
Калибровка камеры является критически важным компонентом многих решений в области компьютерного зрения. Она гарантирует, что модели ИИ точно интерпретируют изображения для таких задач, как обнаружение объектов, отслеживание и оценка глубины. Внутренние и внешние параметры помогают согласовать изображения с измерениями реального мира, чтобы предотвратить искажения, которые могут повлиять на работу приложений ИИ.
Исправление дисторсии объектива критически важно для приложений дополненной реальности, промышленной автоматизации и многокамерных систем. По мере развития ИИ, автоматизированные методы калибровки камеры повышают эффективность, точность и долгосрочную надежность в реальных приложениях.






