Понимание 3D обнаружения объектов и его применений
Исследуй, как работает 2D и 3D обнаружение объектов, их ключевые различия и применение в таких областях, как беспилотные автомобили, робототехника и дополненная реальность.

С годами детектирование объектов становится всё более продвинутым. Оно прошло путь от распознавания объектов на простых двумерных (2D) изображениях до идентификации объектов в сложном трехмерном (3D) мире вокруг нас. Ранние методы, такие как сопоставление с шаблоном, которые заключались в поиске объектов путем сравнения частей изображения с сохраненными эталонными изображениями, были разработаны в 1970-х годах и легли в основу 2D-детектирования объектов. В 1990-х годах внедрение таких технологий, как LIDAR (обнаружение и определение дальности с помощью света), позволило системам легче захватывать данные о глубине и пространстве. Сегодня методы мультимодальной интеграции, сочетающие 2D-изображения с 3D-данными, открыли путь для высокоточных систем 3D-детектирования объектов.
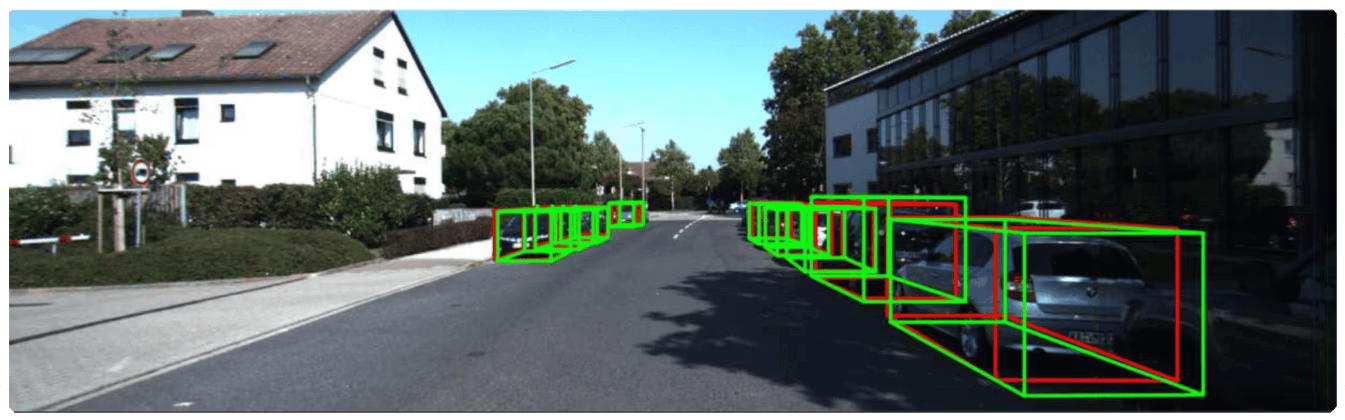
Рис 1. Пример 3D-детектирования объектов.
В этой статье мы разберемся, что такое 3D-детектирование объектов, как оно работает и чем отличается от 2D-детектирования. Мы также обсудим некоторые варианты применения 3D-детектирования объектов. Поехали!
Link to this sectionОбзор 2D-детектирования объектов#
Прежде чем переходить к 3D-детектированию, давай разберемся, как работает 2D-детектирование объектов. 2D-детектирование объектов — это метод компьютерного зрения, который позволяет компьютерам распознавать и находить объекты на плоских, двумерных изображениях. Он работает путем анализа горизонтального (X) и вертикального (Y) положения объекта на снимке. Например, если ты передашь изображение игроков на футбольном поле модели для 2D-детектирования объектов, такой как Ultralytics YOLOv8, она проанализирует изображение и нарисует ограничивающие рамки вокруг каждого объекта (в данном случае — игроков), точно определяя их местоположение.
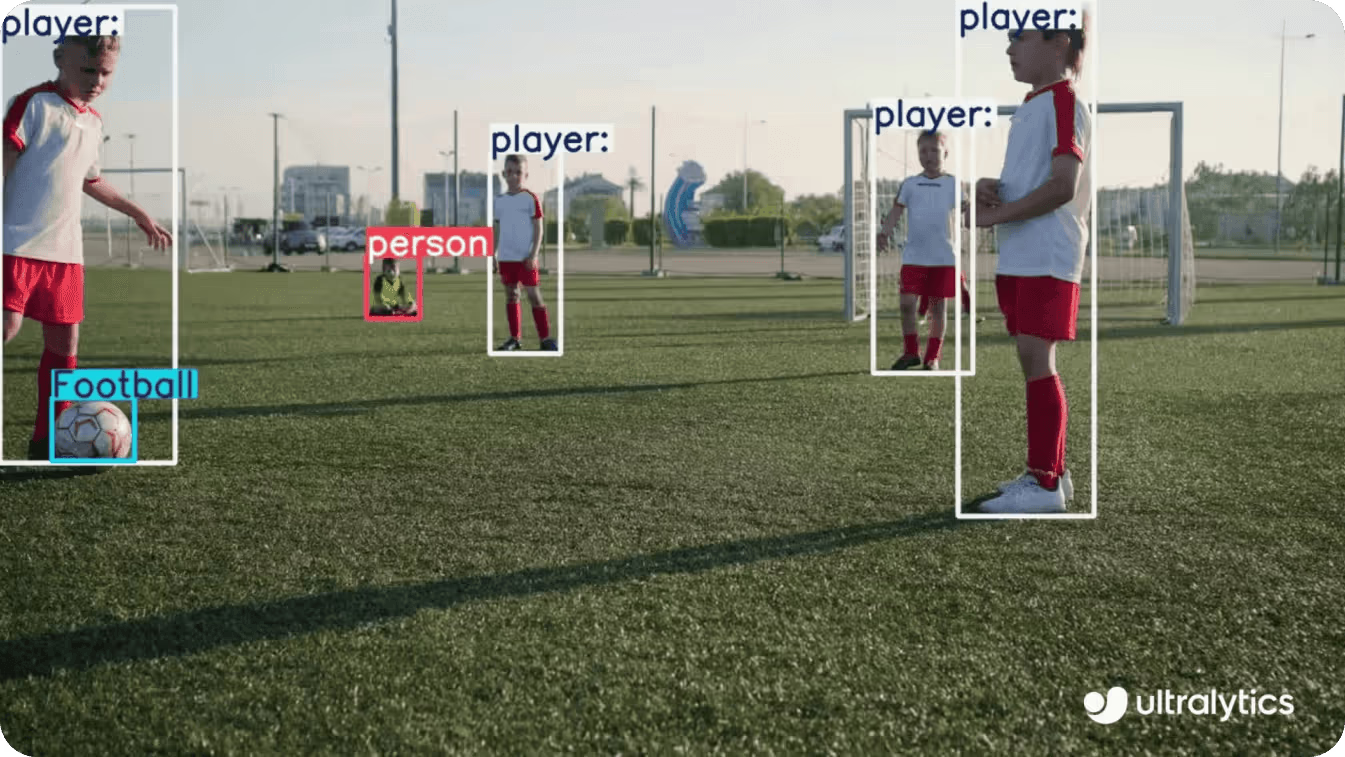
Рис 2. Использование YOLOv8 для 2D-детектирования игроков на футбольном поле.
Однако у 2D-детектирования объектов есть свои ограничения. Поскольку оно учитывает только два измерения, оно не понимает глубину. Это может затруднить определение того, насколько далеко находится объект или какого он размера. Например, крупный объект вдалеке может казаться такого же размера, как небольшой объект, который находится ближе, что может сбивать с толку. Отсутствие информации о глубине может привести к неточностям в таких областях, как робототехника или дополненная реальность, где необходимо знать реальный размер и расстояние до объектов. Именно здесь и возникает потребность в 3D-детектировании объектов.
Link to this sectionРазвитие пространственного восприятия с помощью 3D-детектирования объектов#
3D-детектирование объектов — это продвинутый метод компьютерного зрения, который позволяет компьютерам идентифицировать объекты в трехмерном пространстве, давая им гораздо более глубокое понимание окружающего мира. В отличие от 2D-детектирования, 3D-детектирование также учитывает данные о глубине. Информация о глубине дает больше деталей: где находится объект, насколько он велик, как далеко он находится и как он расположен в реальном 3D-мире. Интересно, что 3D-детектирование также лучше справляется с ситуациями, когда один объект частично скрывает другой (окклюзии), и остается надежным даже при смене перспективы. Это мощный инструмент для сценариев, требующих точного пространственного восприятия.
3D-детектирование объектов жизненно важно для таких приложений, как беспилотные автомобили, робототехника и системы дополненной реальности. Оно работает с использованием датчиков, таких как LiDAR или стереокамеры. Эти датчики создают детальные 3D-карты окружающей среды, известные как облака точек или карты глубины. Затем эти карты анализируются для обнаружения объектов в 3D-среде.
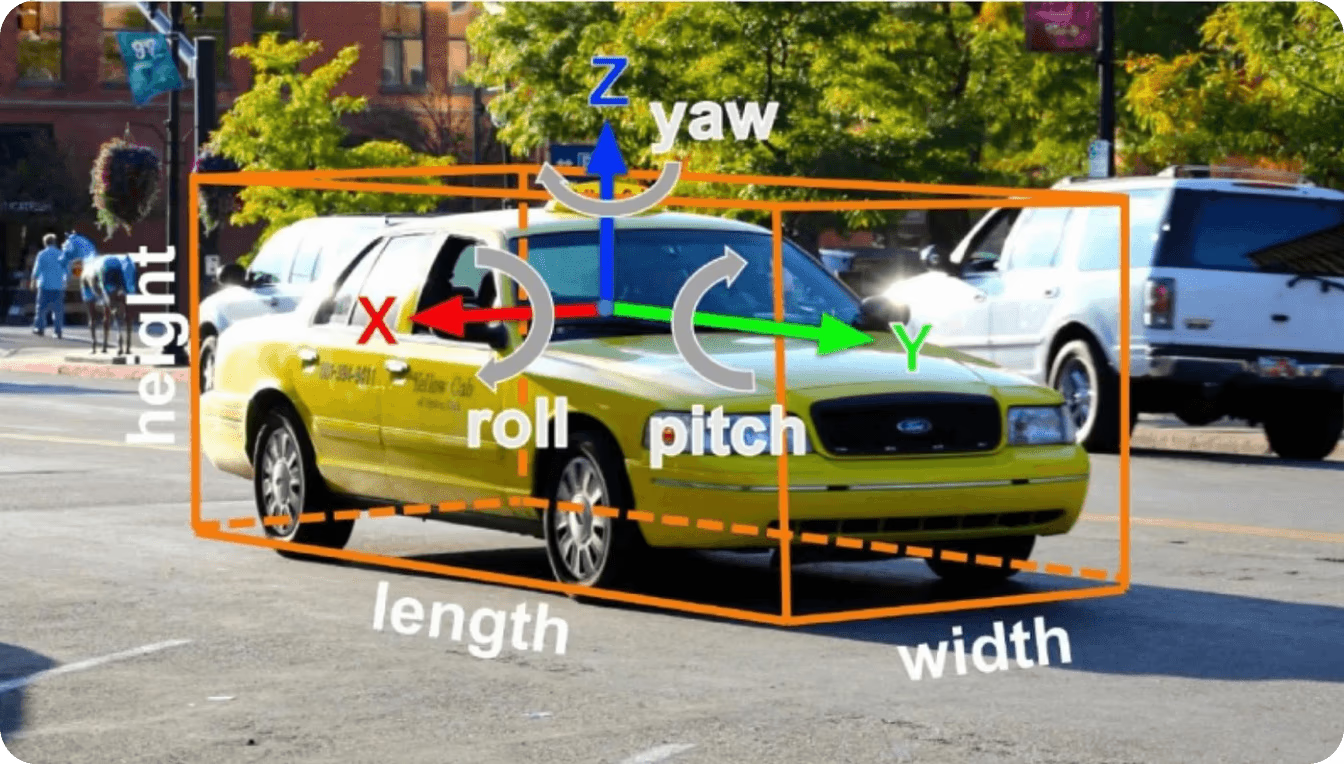
Рис 3. 3D-детектирование автомобиля.
Существует много продвинутых моделей компьютерного зрения, разработанных специально для обработки 3D-данных, таких как облака точек. Например, VoteNet — это модель, использующая метод голосования Хафа для прогнозирования центра объекта в облаке точек, что облегчает точное обнаружение и классификацию объектов. Аналогично, VoxelNet — это модель, которая преобразует облака точек в сетку из маленьких кубов, называемых вокселями, для упрощения анализа данных.
Link to this sectionКлючевые различия между 2D и 3D-детектированием объектов#
Теперь, когда мы разобрались в 2D и 3D-детектировании объектов, давай рассмотрим их ключевые различия. 3D-детектирование сложнее, чем 2D-детектирование, поскольку оно работает с облаками точек. Анализ 3D-данных, таких как облака точек, созданные LiDAR, требует гораздо больше памяти и вычислительных мощностей. Еще одно отличие заключается в сложности используемых алгоритмов. Модели для 3D-детектирования объектов должны быть сложнее, чтобы справляться с оценкой глубины, анализом 3D-формы и ориентации объекта.
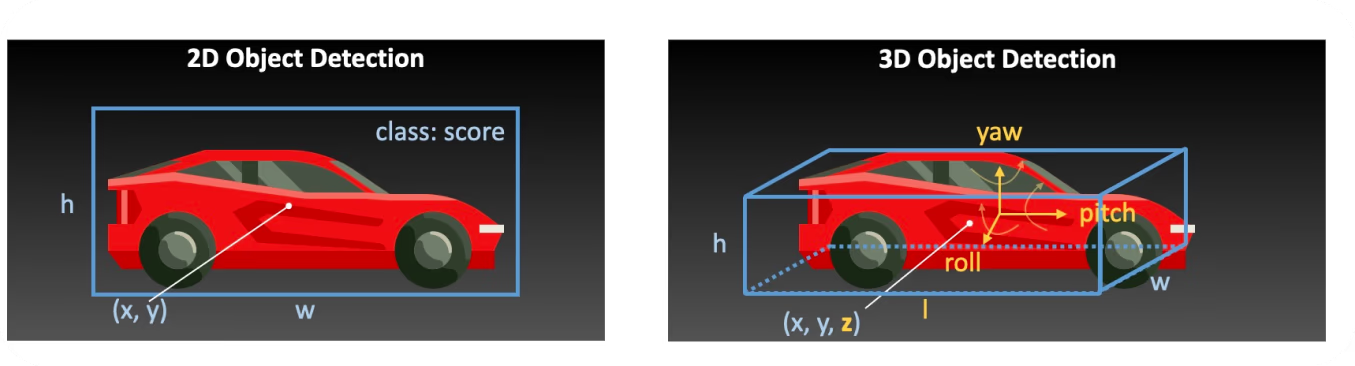
Рис 4. 2D против 3D-детектирования объектов.
Модели 3D-детектирования требуют больших математических и вычислительных затрат, чем модели 2D-детектирования. Обработка 3D-данных в реальном времени может быть сложной задачей без передового оборудования и оптимизаций. Однако именно эти различия делают 3D-детектирование более подходящим для задач, требующих глубокого пространственного понимания. С другой стороны, 2D-детектирование чаще используется для более простых задач, таких как системы безопасности, которым требуется распознавание изображений или анализ видео.
Link to this sectionПлюсы и минусы 3D-детектирования объектов#
3D-детектирование объектов обладает рядом преимуществ, которые выделяют его на фоне традиционных методов 2D-детектирования. Захватывая все три измерения объекта, оно предоставляет точные данные о его местоположении, размере и ориентации относительно реального мира. Такая точность критически важна для таких областей, как беспилотные автомобили, где знание точного положения препятствий жизненно необходимо для безопасности. Еще одним преимуществом использования 3D-детектирования является возможность гораздо лучше понять, как различные объекты соотносятся друг с другом в 3D-пространстве.
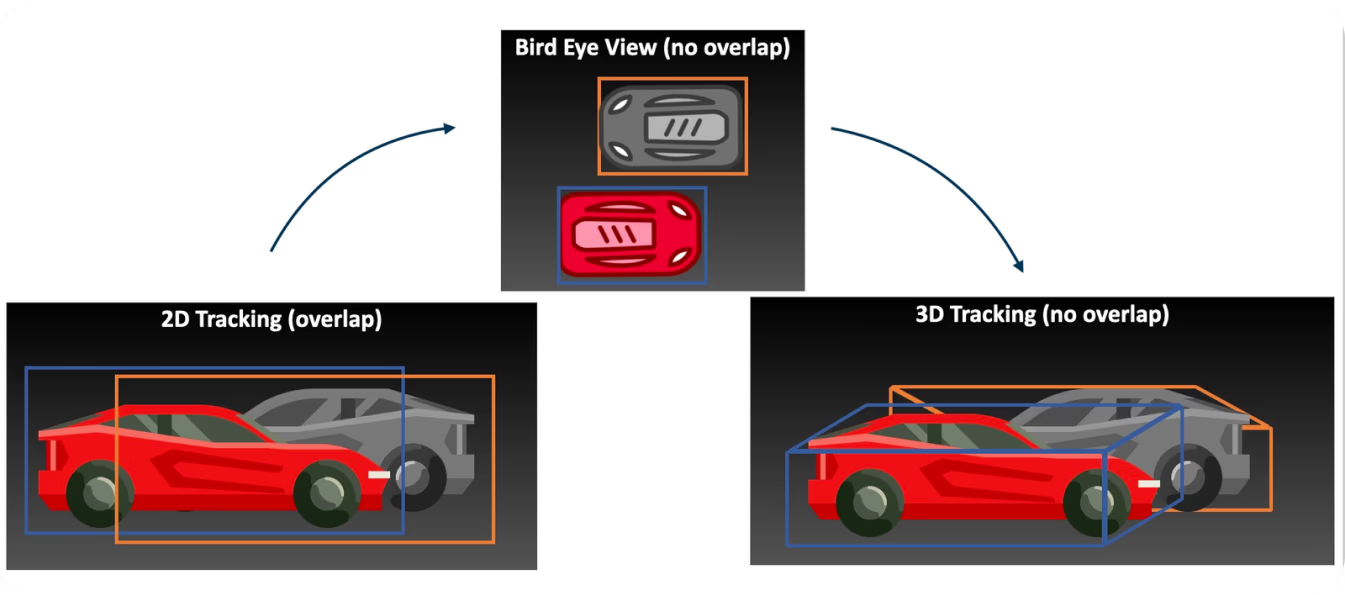
Рис 5. Решение проблемы окклюзий с помощью 3D-детектирования объектов.
Несмотря на множество преимуществ, у 3D-детектирования объектов есть и ограничения. Вот основные сложности, о которых стоит помнить:
- Более высокие вычислительные затраты: работа с 3D-данными требует более мощных аппаратных ресурсов, и стоимость может быстро расти.
- Более сложные требования к данным: 3D-детектирование часто опирается на передовые датчики, такие как LiDAR, которые могут быть дорогими и доступными не во всех условиях.
- Сбор и обработка данных: сложные требования 3D-детектирования к данным делают сбор, подготовку и обработку больших наборов данных, необходимых для обучения моделей, трудоемким и ресурсозатратным процессом.
- Повышенная сложность моделей: модели, используемые для 3D-детектирования, как правило, сложнее, имеют больше слоев и параметров, чем те, что используются для 2D-детектирования.
Link to this sectionПрименение 3D-детектирования объектов#
Теперь, когда мы обсудили плюсы и минусы 3D-детектирования объектов, давай подробнее рассмотрим некоторые сценарии его использования.
Link to this sectionАвтономные транспортные средства#
В беспилотных автомобилях 3D-детектирование объектов жизненно важно для восприятия окружения вокруг машины. Оно позволяет автомобилям обнаруживать пешеходов, другие машины и препятствия. Оно также предоставляет точную информацию об их положении, размере и ориентации в реальном мире. Детальные данные, полученные с помощью систем 3D-детектирования, способствуют более безопасному вождению для пассажиров.
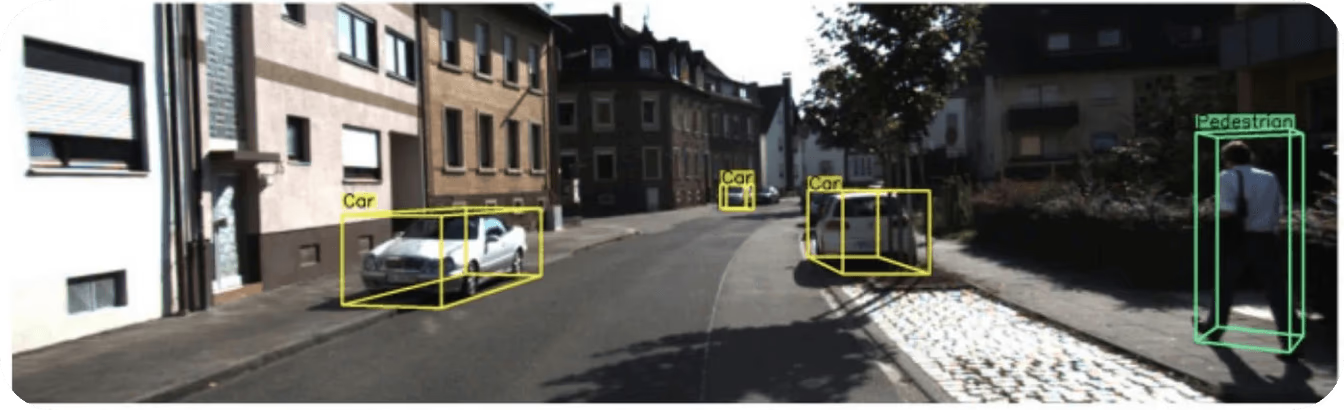
Рис 6. Использование 3D-детектирования объектов в беспилотных автомобилях. (источник: towardsdatascience.com)
Link to this sectionРобототехника#
Роботизированные системы используют 3D-детектирование объектов для различных целей. Они применяют его для навигации в разных типах сред, захвата и перемещения объектов, а также для взаимодействия с окружением. Такие сценарии особенно важны в динамичных условиях, например на складах или производственных объектах, где роботам необходимо понимать трехмерную планировку для эффективной работы.
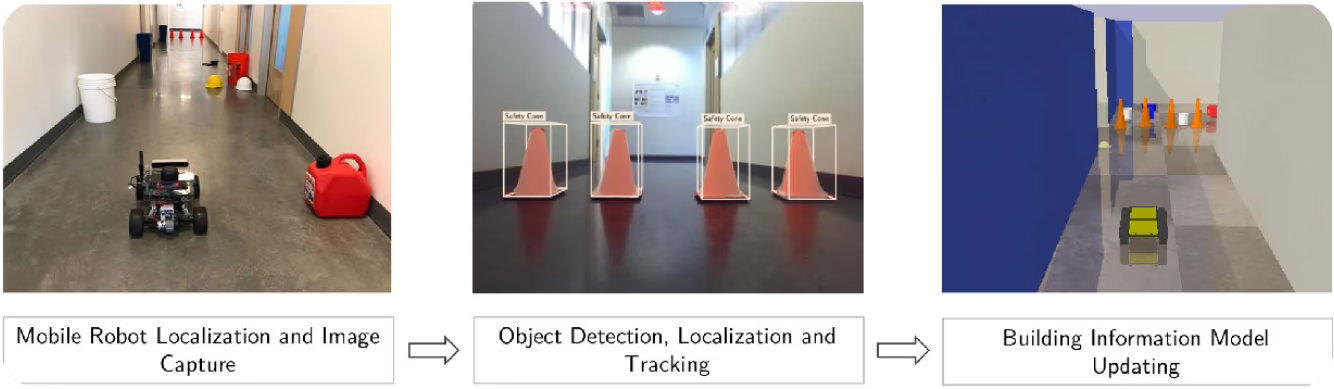
Рис 7. Мобильный робот, использующий 3D-детектирование объектов.
Link to this sectionДополненная и виртуальная реальность (AR/VR)#
Еще один интересный вариант использования 3D-детектирования объектов — это приложения дополненной и виртуальной реальности. 3D-детектирование используется для точного размещения виртуальных объектов в реалистичной среде VR или AR. Это повышает общий пользовательский опыт от таких технологий. Оно также позволяет VR/AR-системам распознавать и отслеживать физические объекты, создавая иммерсивные среды, где цифровые и физические элементы бесшовно взаимодействуют друг с другом. Например, геймеры, использующие AR/VR-гарнитуры, могут получить гораздо более иммерсивный опыт благодаря 3D-детектированию объектов. Оно делает взаимодействие с виртуальными объектами в 3D-пространстве гораздо более увлекательным.
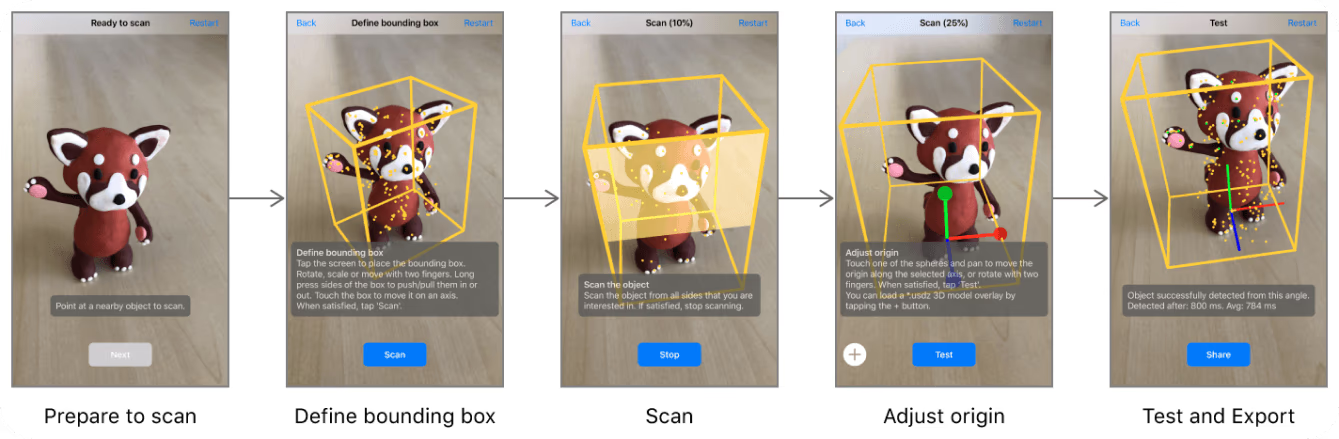
Рис 8. Пример использования 3D-распознавания объектов в AR-приложении.
Link to this sectionЗаключительные мысли о 3D-детектировании объектов#
3D-детектирование объектов позволяет системам понимать глубину и пространство более эффективно, чем методы 2D-детектирования. Оно играет ключевую роль в таких областях, как беспилотные автомобили, роботы и AR/VR, где важно знать размер, расстояние и положение объекта. Хотя 3D-детектирование требует больших вычислительных мощностей и сложных данных, его способность предоставлять точную и детальную информацию делает его очень ценным инструментом во многих сферах. По мере развития технологий эффективность и доступность 3D-детектирования объектов, скорее всего, будут расти, открывая путь к еще более широкому внедрению и инновациям в различных отраслях.
Оставайся на связи с нашим сообществом, чтобы быть в курсе последних новостей ИИ! Посети наш репозиторий на GitHub, чтобы увидеть, как мы используем ИИ для создания передовых решений в таких отраслях, как производство и здравоохранение. 🚀






