Comprensión de la detección de objetos 3D y sus aplicaciones
Explora cómo funcionan la detección de objetos 2D y 3D, sus diferencias clave y sus aplicaciones en campos como los vehículos autónomos, la robótica y la realidad aumentada.

A lo largo de los años, la detección de objetos se ha vuelto cada vez más avanzada. Ha progresado desde el reconocimiento de objetos en imágenes bidimensionales (2D) simples hasta la identificación de objetos en el complejo mundo tridimensional (3D) que nos rodea. Las primeras técnicas, como la coincidencia de plantillas, que consistían en encontrar objetos comparando partes de una imagen con imágenes de referencia almacenadas, se desarrollaron en la década de 1970 y sentaron las bases para la detección de objetos en 2D. En la década de 1990, la introducción de tecnologías como LIDAR (Light Detection and Ranging) permitió que los sistemas capturaran información espacial y de profundidad con mayor facilidad. Hoy en día, los métodos de fusión multimodal, que combinan imágenes 2D con datos 3D, han allanado el camino para sistemas de detección de objetos en 3D altamente precisos.
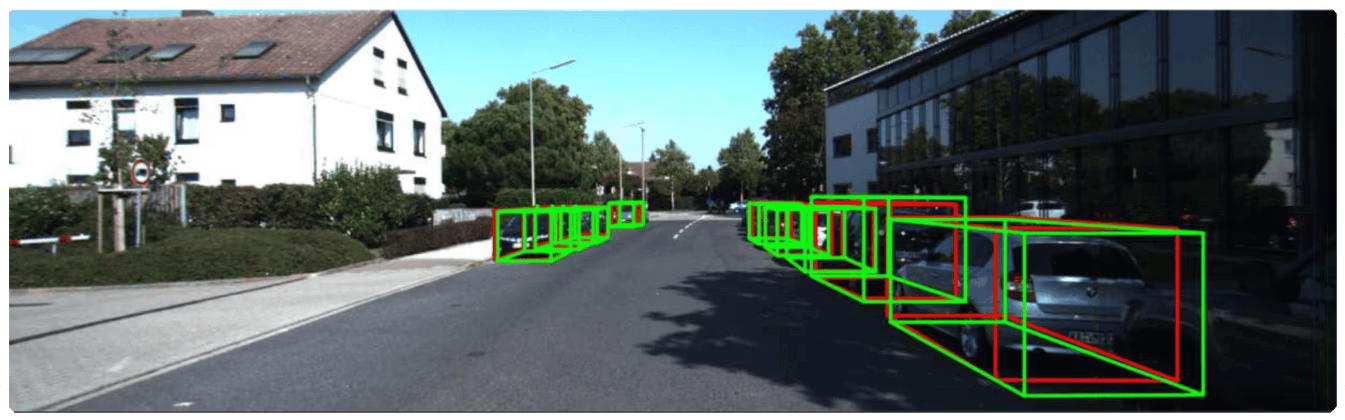
Fig 1. Un ejemplo de detección de objetos en 3D.
En este artículo, exploraremos qué es la detección de objetos en 3D, cómo funciona y en qué se diferencia de la detección de objetos en 2D. También hablaremos de algunas de las aplicaciones de la detección de objetos en 3D. ¡Empecemos!
Link to this sectionUna visión general de la detección de objetos en 2D#
Antes de echar un vistazo a la detección de objetos en 3D, comprendamos cómo funciona la detección de objetos en 2D. La detección de objetos en 2D es una técnica de visión artificial que permite a los ordenadores reconocer y localizar objetos dentro de imágenes planas y bidimensionales. Funciona analizando la posición horizontal (X) y vertical (Y) de un objeto en una imagen. Por ejemplo, si pasas una imagen de jugadores en un campo de fútbol a un modelo de detección de objetos en 2D como Ultralytics YOLOv8, este puede analizar la imagen y dibujar cuadros delimitadores alrededor de cada objeto (en este caso, los jugadores), identificando su ubicación con precisión.
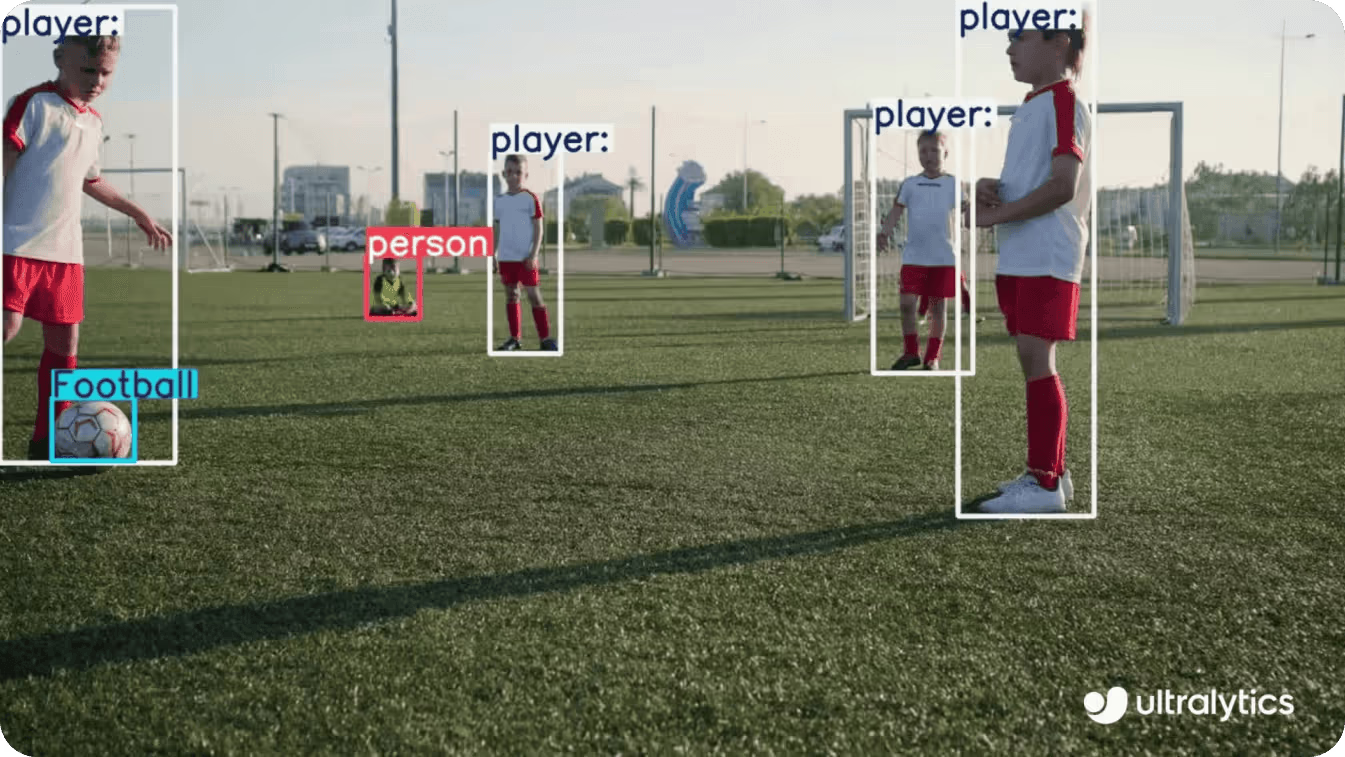
Fig 2. Detección de objetos en 2D con YOLOv8 utilizada para detectar jugadores en un campo de fútbol.
Sin embargo, la detección de objetos en 2D tiene sus limitaciones. Como solo considera dos dimensiones, no comprende la profundidad. Esto puede dificultar el cálculo de la distancia o el tamaño de un objeto. Por ejemplo, un objeto grande lejano podría parecer del mismo tamaño que un objeto más pequeño que está más cerca, lo cual puede ser confuso. La falta de información sobre la profundidad puede provocar imprecisiones en aplicaciones como la robótica o la realidad aumentada, donde es necesario conocer el tamaño real y la distancia de los objetos. Ahí es donde surge la necesidad de la detección de objetos en 3D.
Link to this sectionObtener conciencia espacial con la detección de objetos en 3D#
La detección de objetos en 3D es una técnica avanzada de visión artificial que permite a los ordenadores identificar objetos en un espacio tridimensional, otorgándoles una comprensión mucho más profunda del mundo que los rodea. A diferencia de la detección de objetos en 2D, la detección de objetos en 3D también tiene en cuenta los datos sobre la profundidad. La información de profundidad proporciona más detalles, como dónde está un objeto, qué tamaño tiene, a qué distancia se encuentra y cómo está posicionado en el mundo real en 3D. Curiosamente, la detección en 3D también puede gestionar mejor las situaciones en las que un objeto oculta parcialmente a otro (oclusiones) y sigue siendo fiable incluso cuando cambia la perspectiva. Es una herramienta potente para casos de uso que necesitan una conciencia espacial precisa.
La detección de objetos en 3D es vital para aplicaciones como coches autónomos, robótica y sistemas de realidad aumentada. Funciona utilizando sensores como LiDAR o cámaras estéreo. Estos sensores crean mapas 3D detallados del entorno, conocidos como nubes de puntos o mapas de profundidad. Estos mapas se analizan luego para detectar objetos en un entorno 3D.
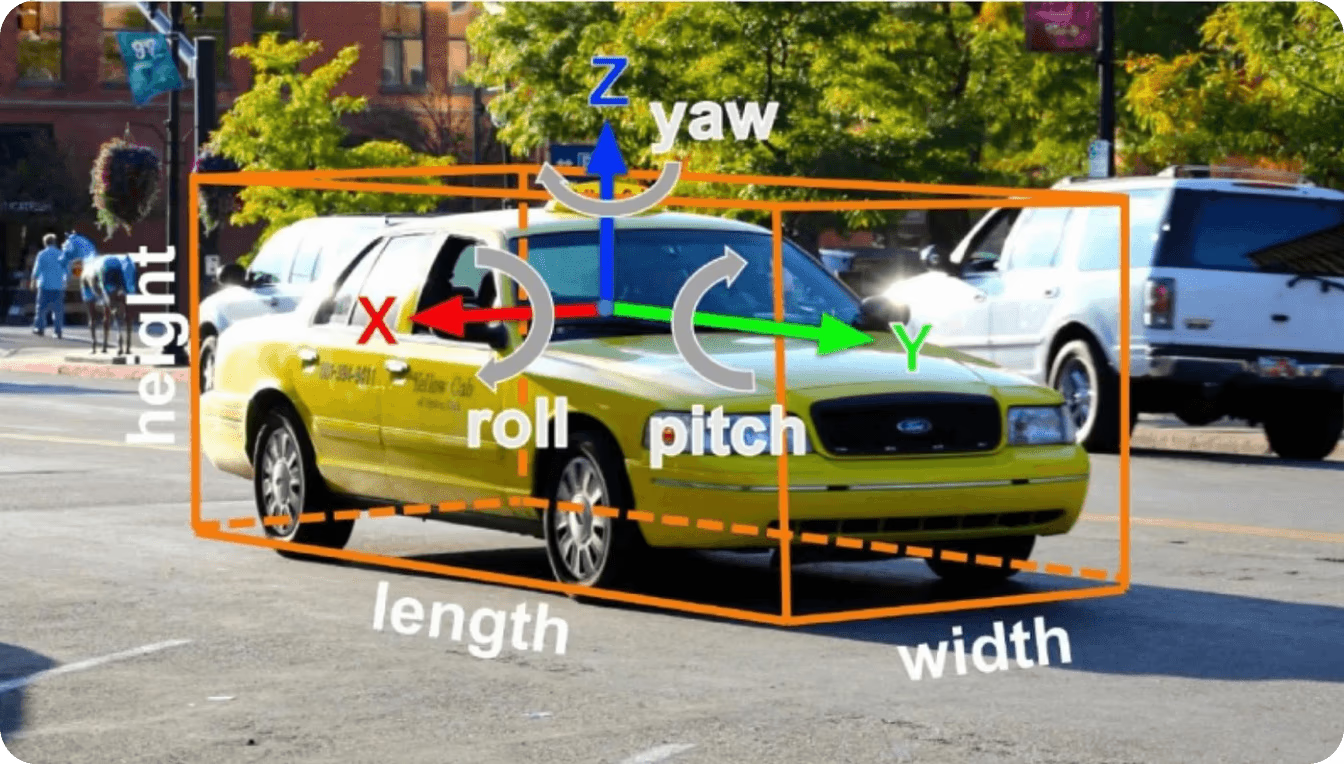
Fig 3. Detección de objetos en 3D de un coche.
Existen muchos modelos de visión artificial avanzados diseñados específicamente para manejar datos 3D, como las nubes de puntos. Por ejemplo, VoteNet es un modelo que utiliza un método llamado votación de Hough para predecir dónde está el centro de un objeto en una nube de puntos, lo que facilita la detección y clasificación precisa de los objetos. Del mismo modo, VoxelNet es un modelo que convierte nubes de puntos en una cuadrícula de pequeños cubos llamados voxeles para simplificar el análisis de datos.
Link to this sectionDiferencias clave entre la detección de objetos en 2D y 3D#
Ahora que hemos comprendido la detección de objetos en 2D y 3D, exploremos sus diferencias clave. La detección de objetos en 3D es más complicada que la detección de objetos en 2D porque trabaja con nubes de puntos. Analizar datos en 3D, como las nubes de puntos generadas por LiDAR, requiere mucha más memoria y potencia de cálculo. Otra diferencia es la complejidad de los algoritmos involucrados. Los modelos de detección de objetos en 3D deben ser más complejos para poder manejar la estimación de profundidad, el análisis de formas 3D y el análisis de la orientación de un objeto.
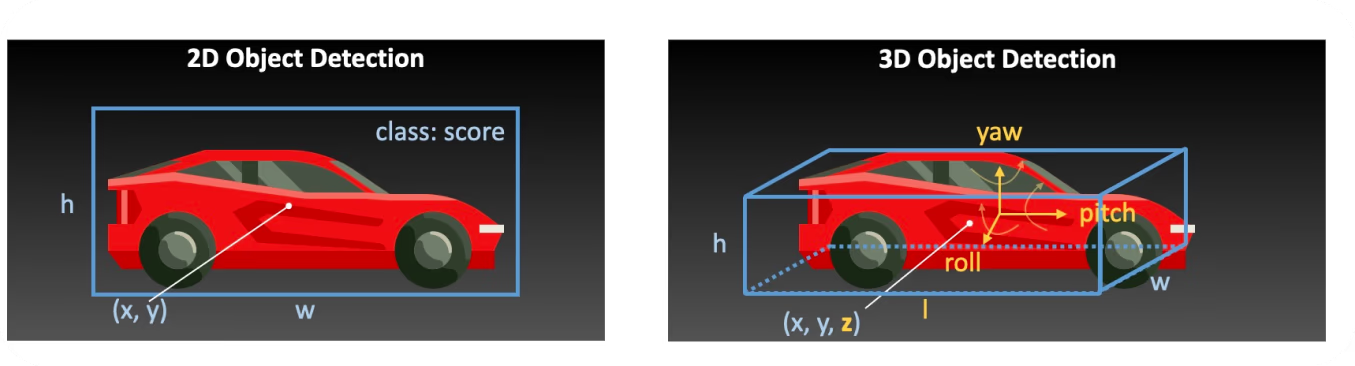
Fig 4. Detección de objetos en 2D frente a 3D.
Los modelos de detección de objetos en 3D implican un trabajo matemático y computacional más pesado que los modelos de detección de objetos en 2D. Procesar datos en 3D en tiempo real puede ser un desafío sin hardware avanzado y optimizaciones. Sin embargo, estas diferencias hacen que la detección de objetos en 3D sea más adecuada para aplicaciones que requieren una mejor comprensión espacial. Por otro lado, la detección de objetos en 2D se utiliza a menudo para aplicaciones más sencillas como sistemas de seguridad que necesitan reconocimiento de imágenes o análisis de vídeo.
Link to this sectionPros y contras de la detección de objetos en 3D#
La detección de objetos en 3D ofrece varias ventajas que la hacen destacar frente a los métodos tradicionales de detección de objetos en 2D. Al capturar las tres dimensiones de un objeto, proporciona detalles precisos sobre su ubicación, tamaño y orientación con respecto al mundo real. Tal precisión es crucial para aplicaciones como los coches autónomos, donde conocer la posición exacta de los obstáculos es vital para la seguridad. Otra ventaja de utilizar la detección de objetos en 3D es que puede ayudarte a obtener una comprensión mucho mejor de cómo se relacionan los diferentes objetos entre sí en el espacio 3D.
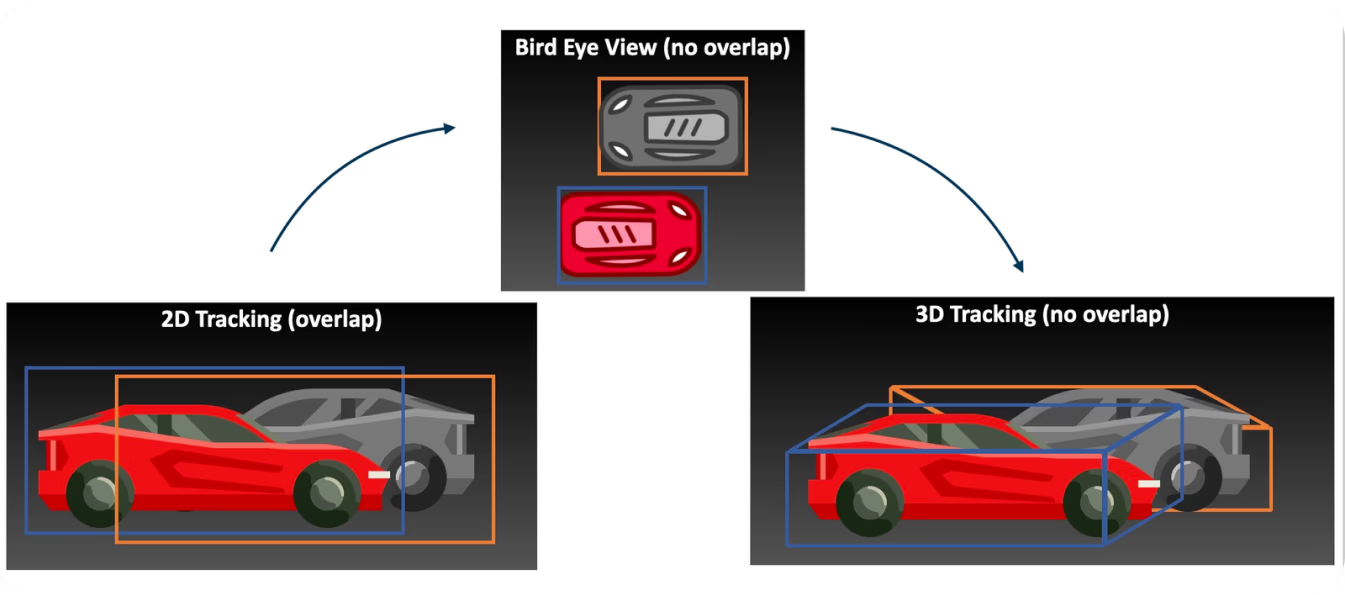
Fig 5. Resolución de oclusiones con detección de objetos en 3D.
A pesar de los muchos beneficios, también existen limitaciones relacionadas con la detección de objetos en 3D. Aquí tienes algunos de los desafíos clave a tener en cuenta:
- Costes computacionales más altos: Trabajar con datos 3D requiere recursos de hardware más potentes, y el coste puede acumularse rápidamente.
- Requisitos de datos más complejos: La detección de objetos en 3D a menudo se basa en sensores avanzados como LiDAR, que pueden ser costosos y no estar necesariamente disponibles en todos los entornos.
- Recopilación y procesamiento de datos: Los complejos requisitos de datos de la detección de objetos en 3D hacen que la recopilación, preparación y procesamiento de los grandes conjuntos de datos necesarios para entrenar los modelos consuman mucho tiempo y recursos.
- Mayor complejidad del modelo: Los modelos utilizados para la detección de objetos en 3D son generalmente más complicados, con más capas y parámetros que los utilizados para la detección de objetos en 2D.
Link to this sectionAplicaciones de la detección de objetos en 3D#
Ahora que hemos hablado de los pros y contras de la detección de objetos en 3D, veamos con más detalle algunos de los casos de uso de la detección de objetos en 3D.
Link to this sectionVehículos autónomos#
En los coches autónomos, la detección de objetos en 3D es vital para percibir el entorno alrededor del coche. Permite a los vehículos detectar peatones, otros coches y obstáculos. También proporciona información precisa sobre su posición, tamaño y orientación en el mundo real. Los datos detallados obtenidos a través de los sistemas de detección de objetos en 3D son útiles para una experiencia de conducción autónoma mucho más segura para los pasajeros a bordo.
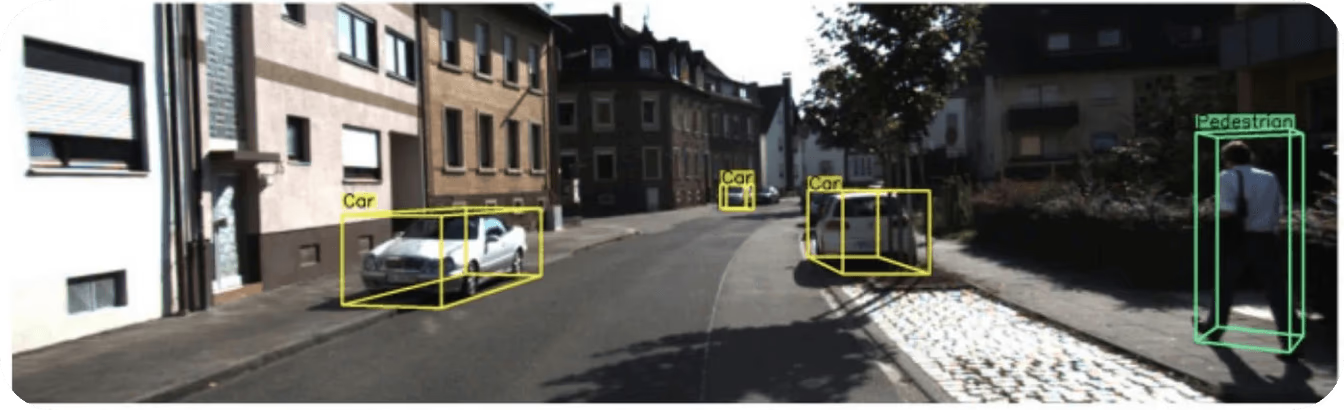
Fig 6. Uso de la detección de objetos en 3D en vehículos autónomos. (fuente: towardsdatascience.com)
Link to this sectionRobótica#
Los sistemas robóticos utilizan la detección de objetos en 3D para varias aplicaciones. La usan para navegar a través de diferentes tipos de entornos, recoger y colocar objetos, e interactuar con su entorno. Estos casos de uso son particularmente importantes en entornos dinámicos como almacenes o instalaciones de fabricación, donde los robots necesitan comprender diseños tridimensionales para funcionar de manera efectiva.
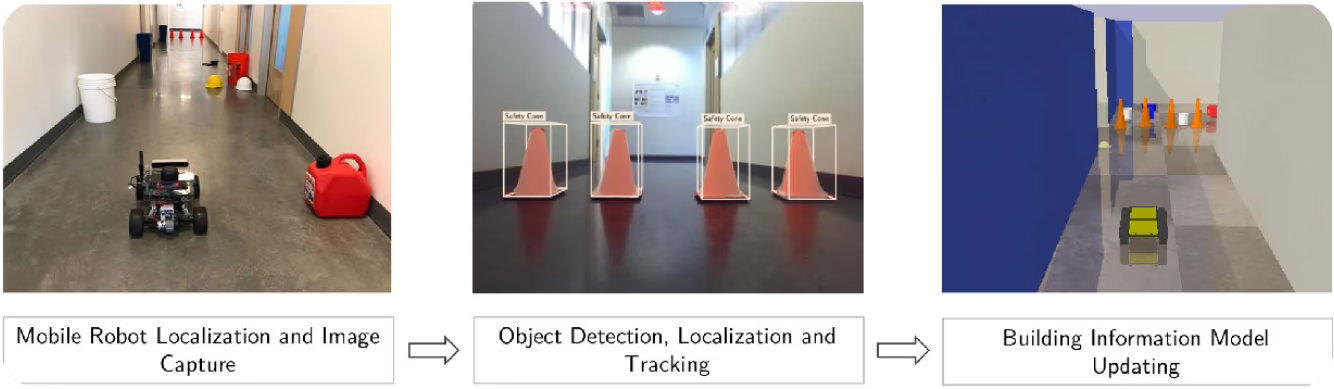
Fig 7. Un robot móvil que utiliza detección de objetos en 3D.
Link to this sectionRealidad aumentada y virtual (AR/VR)#
Otro caso de uso interesante de la detección de objetos en 3D es en las aplicaciones de realidad aumentada y virtual. La detección de objetos en 3D se utiliza para colocar con precisión objetos virtuales en un entorno VR o AR realista. Hacerlo aumenta la experiencia general del usuario de tales tecnologías. También permite que los sistemas VR/AR reconozcan y rastreen objetos físicos, creando entornos inmersivos donde los elementos digitales y físicos interactúan a la perfección. Por ejemplo, los jugadores que usan cascos de AR/VR pueden obtener una experiencia mucho más inmersiva con la ayuda de la detección de objetos en 3D. Hace que las interacciones con objetos virtuales en espacios 3D sean mucho más atractivas.
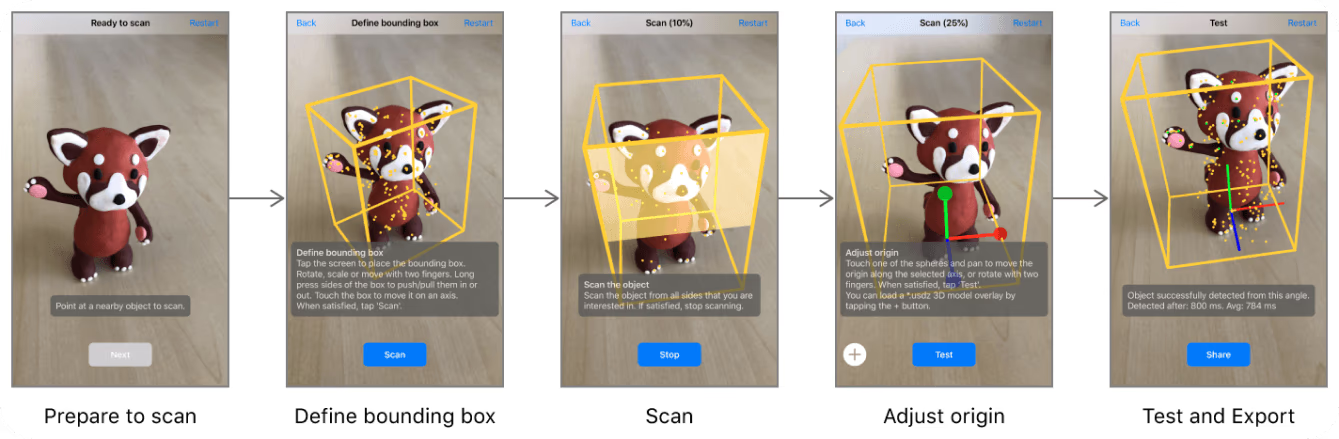
Fig 8. Un ejemplo de reconocimiento de objetos en 3D utilizado para una aplicación de AR.
Link to this sectionReflexiones finales sobre la detección de objetos en 3D#
La detección de objetos en 3D hace posible que los sistemas comprendan la profundidad y el espacio de manera más efectiva que los métodos de detección de objetos en 2D. Desempeña un papel clave en aplicaciones como los coches autónomos, robots y AR/VR, donde es importante conocer el tamaño, la distancia y la posición de un objeto. Si bien la detección de objetos en 3D requiere más potencia de procesamiento y datos complejos, su capacidad para proporcionar información precisa y detallada la convierte en una herramienta muy valiosa en muchos campos. A medida que la tecnología avance, la eficiencia y la accesibilidad de la detección de objetos en 3D probablemente mejorarán, allanando el camino para una adopción e innovación aún más amplias en diversas industrias.
¡Mantente conectado con nuestra comunidad para estar al día de las últimas novedades en IA! Visita nuestro repositorio de GitHub para ver cómo estamos utilizando la IA para crear soluciones de vanguardia en industrias como la fabricación y la sanidad. 🚀






