Comprendre la détection d'objets 3D et ses applications
Explore comment fonctionnent la détection d'objets 2D et 3D, leurs différences clés et leurs applications dans des domaines comme les véhicules autonomes, la robotique et la réalité augmentée.

Au fil des ans, la détection d'objets est devenue de plus en plus avancée. Elle a progressé de la reconnaissance d'objets dans des images bidimensionnelles (2D) simples à l'identification d'objets dans le monde complexe et tridimensionnel (3D) qui nous entoure. Les premières techniques comme la correspondance de modèles, qui consistaient à trouver des objets en comparant des parties d'une image à des images de référence stockées, ont été développées dans les années 1970 et ont formé la base de la détection d'objets 2D. Dans les années 1990, l'introduction de technologies telles que le LIDAR (Light Detection and Ranging) a permis aux systèmes de capturer plus facilement des informations de profondeur et spatiales. Aujourd'hui, les méthodes de fusion multi-modale, qui combinent des images 2D avec des données 3D, ont ouvert la voie à des systèmes de détection d'objets 3D extrêmement précis.
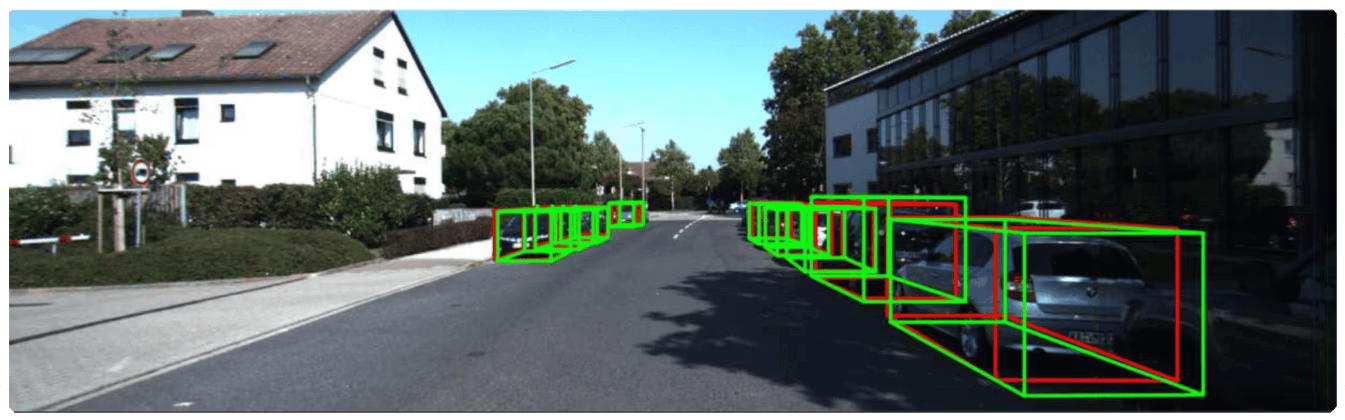
Fig 1. Un exemple de détection d'objets 3D.
Dans cet article, nous allons explorer ce qu'est la détection d'objets 3D, comment elle fonctionne et en quoi elle diffère de la détection d'objets 2D. Nous discuterons également de certaines applications de la détection d'objets 3D. Commençons !
Link to this sectionUn aperçu de la détection d'objets 2D#
Avant de nous intéresser à la détection d'objets 3D, comprenons comment fonctionne la détection d'objets 2D. La détection d'objets 2D est une technique de vision par ordinateur qui permet aux ordinateurs de reconnaître et de localiser des objets dans des images plates et bidimensionnelles. Elle fonctionne en analysant la position horizontale (X) et verticale (Y) d'un objet dans une image. Par exemple, si tu passes une image de joueurs sur un terrain de football à un modèle de détection d'objets 2D comme Ultralytics YOLOv8, il peut analyser l'image et dessiner des boîtes englobantes autour de chaque objet (dans ce cas, les joueurs), identifiant précisément leur emplacement.
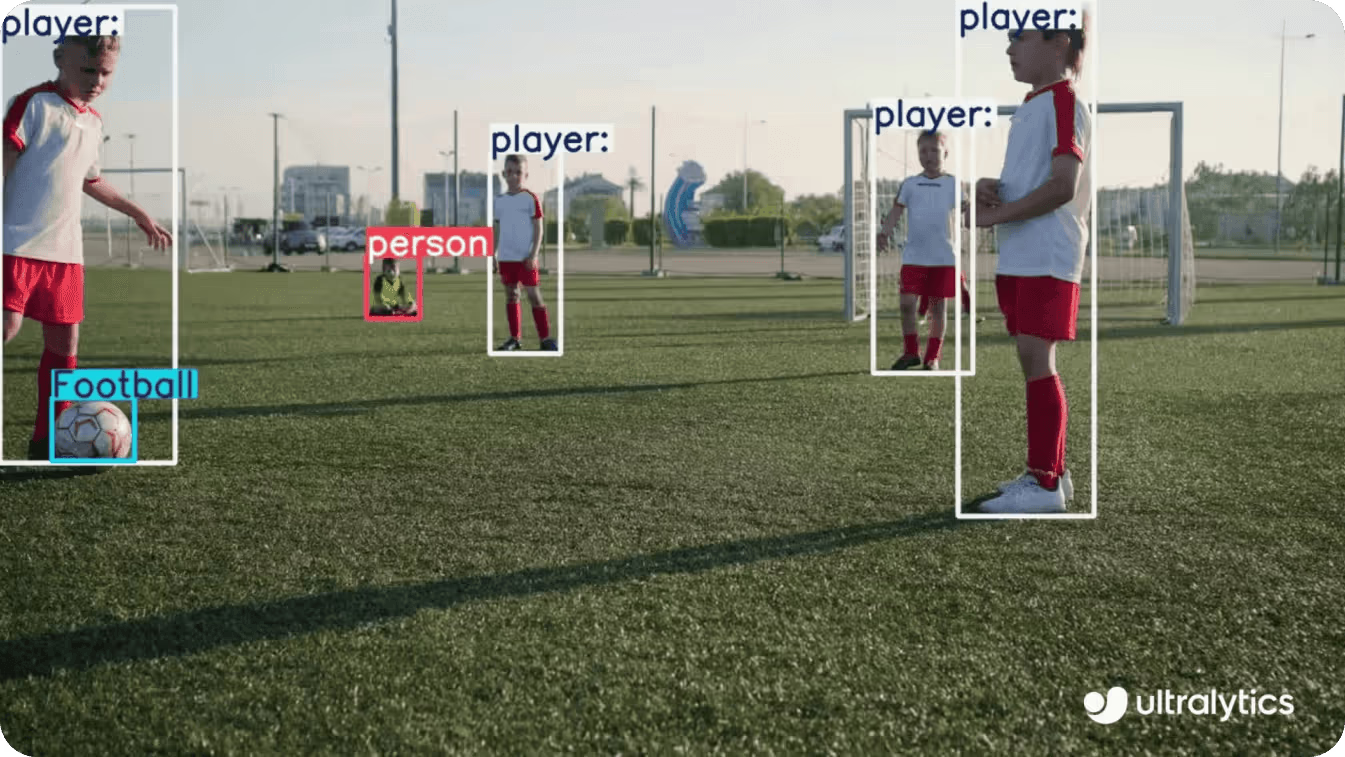
Fig 2. Détection d'objets 2D YOLOv8 utilisée pour détecter des joueurs sur un terrain de football.
Cependant, la détection d'objets 2D a ses limites. Comme elle ne prend en compte que deux dimensions, elle ne comprend pas la profondeur. Cela peut rendre difficile l'évaluation de la distance ou de la taille d'un objet. Par exemple, un grand objet éloigné peut sembler avoir la même taille qu'un objet plus petit mais plus proche, ce qui peut être déroutant. Le manque d'informations sur la profondeur peut entraîner des imprécisions dans des applications comme la robotique ou la réalité augmentée, où il est nécessaire de connaître la taille réelle et la distance des objets. C'est là que le besoin de détection d'objets 3D intervient.
Link to this sectionAcquérir une conscience spatiale avec la détection d'objets 3D#
La détection d'objets 3D est une technique avancée de vision par ordinateur qui permet aux ordinateurs d'identifier des objets dans un espace tridimensionnel, leur donnant une compréhension bien plus profonde du monde qui les entoure. Contrairement à la détection d'objets 2D, la détection d'objets 3D prend également en compte les données de profondeur. Les informations de profondeur fournissent plus de détails, comme l'emplacement d'un objet, sa taille, sa distance et sa position dans le monde 3D réel. Il est intéressant de noter que la détection 3D peut également mieux gérer les situations où un objet en cache partiellement un autre (occlusions) et reste fiable même lorsque la perspective change. C'est un outil puissant pour les cas d'utilisation qui nécessitent une conscience spatiale précise.
La détection d'objets 3D est vitale pour des applications comme les voitures autonomes, la robotique et les systèmes de réalité augmentée. Elle fonctionne en utilisant des capteurs comme le LiDAR ou des caméras stéréo. Ces capteurs créent des cartes 3D détaillées de l'environnement, appelées nuages de points ou cartes de profondeur. Ces cartes sont ensuite analysées pour détecter des objets dans un environnement 3D.
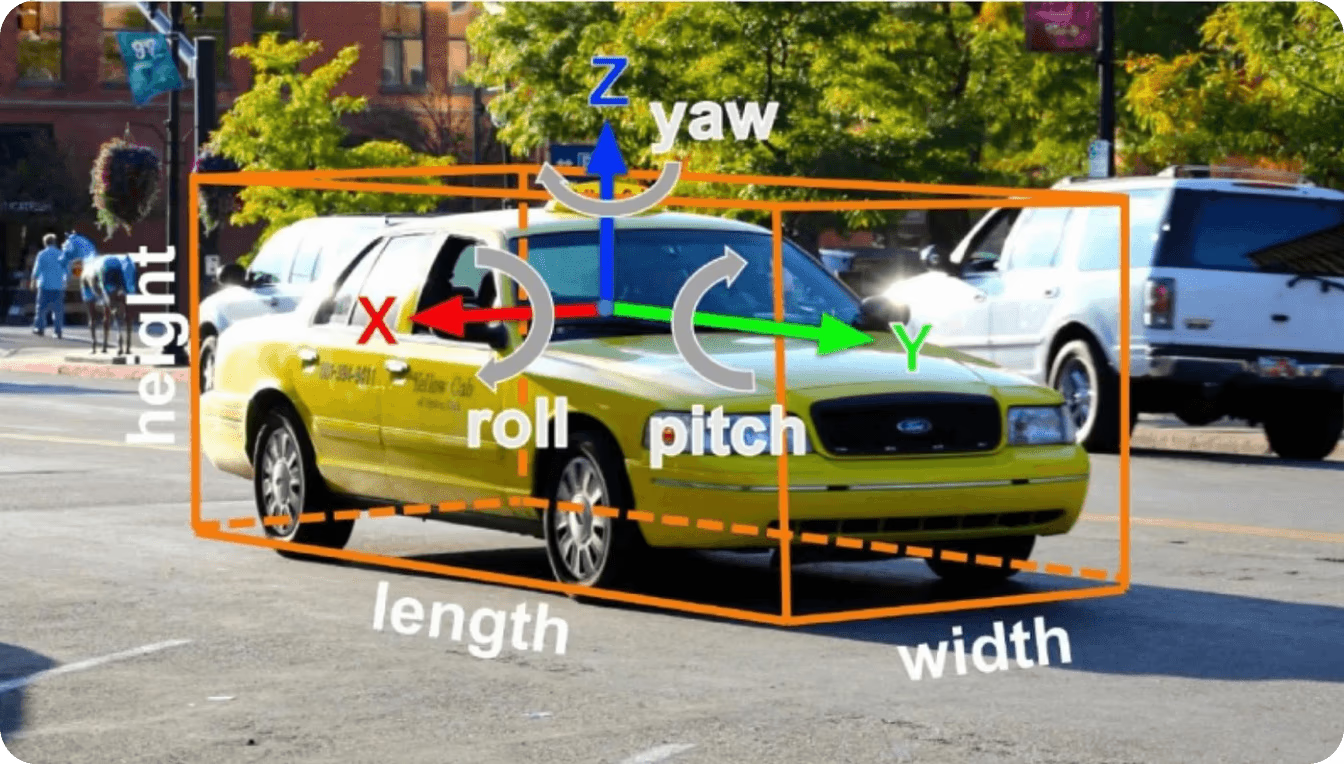
Fig 3. Détection d'objets 3D d'une voiture.
Il existe de nombreux modèles de vision par ordinateur avancés conçus spécifiquement pour gérer les données 3D, comme les nuages de points. Par exemple, VoteNet est un modèle qui utilise une méthode appelée vote de Hough pour prédire où se trouve le centre d'un objet dans un nuage de points, facilitant ainsi la détection et la classification précise des objets. De même, VoxelNet est un modèle qui convertit les nuages de points en une grille de petits cubes appelés voxels pour simplifier l'analyse des données.
Link to this sectionDifférences clés entre la détection d'objets 2D et 3D#
Maintenant que nous avons compris la détection d'objets 2D et 3D, explorons leurs différences clés. La détection d'objets 3D est plus complexe que la détection d'objets 2D car elle travaille avec des nuages de points. L'analyse des données 3D, comme les nuages de points générés par LiDAR, nécessite beaucoup plus de mémoire et de puissance de calcul. Une autre différence réside dans la complexité des algorithmes impliqués. Les modèles de détection d'objets 3D doivent être plus complexes pour pouvoir gérer l'estimation de la profondeur, l'analyse des formes 3D et l'analyse de l'orientation d'un objet.
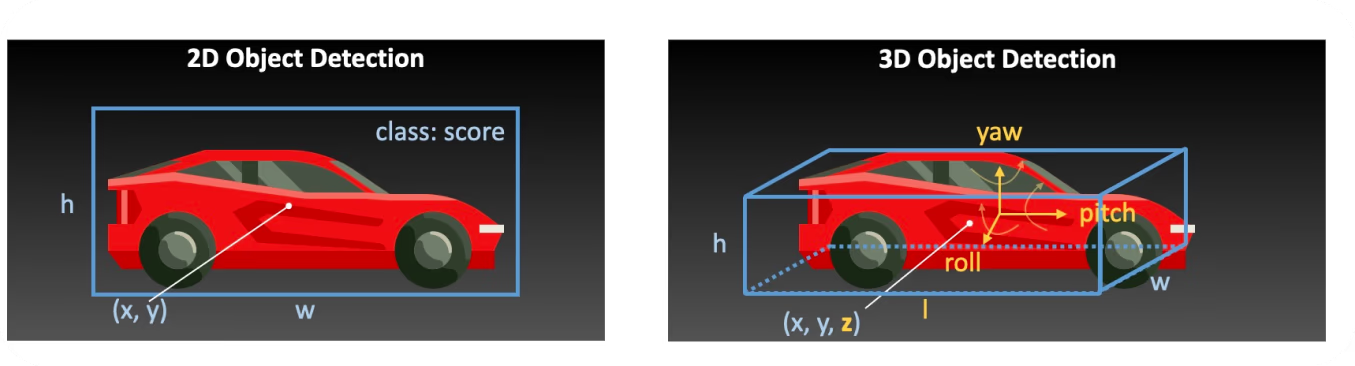
Fig 4. Détection d'objets 2D vs 3D.
Les modèles de détection d'objets 3D impliquent un travail mathématique et computationnel plus lourd que les modèles de détection d'objets 2D. Le traitement des données 3D en temps réel peut s'avérer difficile sans matériel avancé et optimisations. Cependant, ces différences rendent la détection d'objets 3D plus adaptée aux applications nécessitant une meilleure compréhension spatiale. D'un autre côté, la détection d'objets 2D est souvent utilisée pour des applications plus simples comme les systèmes de sécurité qui ont besoin de reconnaissance d'images ou d'analyse vidéo.
Link to this sectionAvantages et inconvénients de la détection d'objets 3D#
La détection d'objets 3D offre plusieurs avantages qui la distinguent des méthodes traditionnelles de détection d'objets 2D. En capturant les trois dimensions d'un objet, elle fournit des détails précis sur son emplacement, sa taille et son orientation par rapport au monde réel. Une telle précision est cruciale pour des applications comme les voitures autonomes, où connaître la position exacte des obstacles est vital pour la sécurité. Un autre avantage de l'utilisation de la détection d'objets 3D est qu'elle peut t'aider à obtenir une bien meilleure compréhension de la façon dont les différents objets interagissent les uns avec les autres dans l'espace 3D.
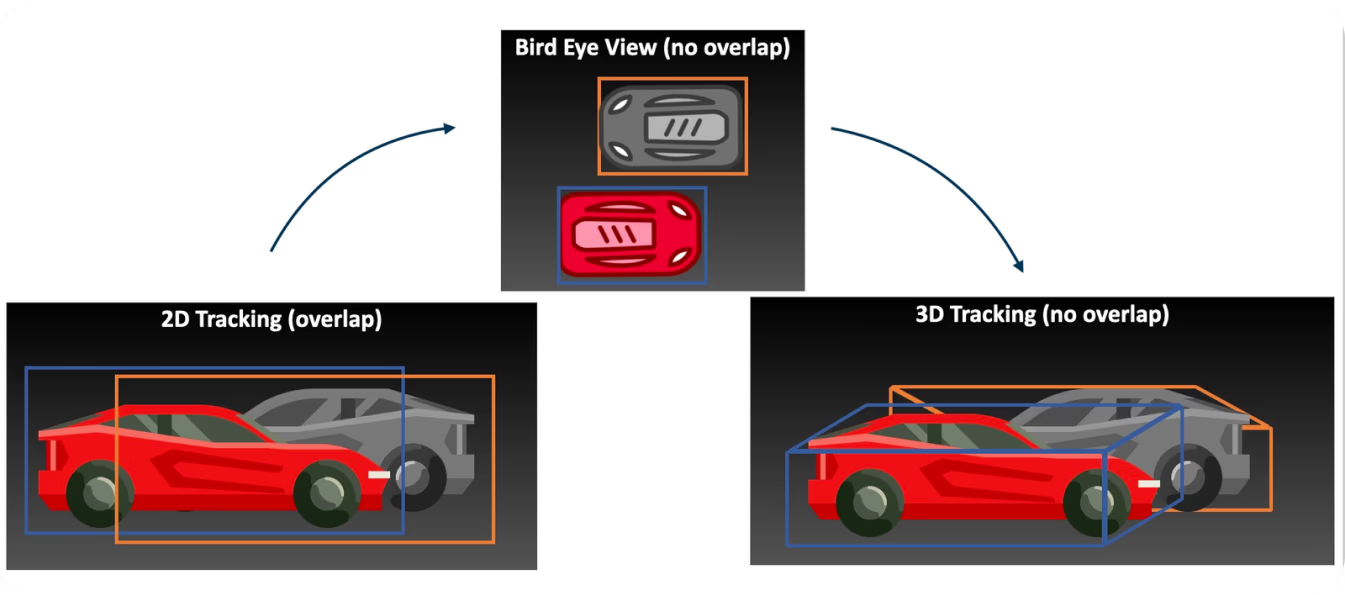
Fig 5. Résoudre les occlusions avec la détection d'objets 3D.
Malgré les nombreux avantages, il existe également des limites liées à la détection d'objets 3D. Voici quelques-uns des principaux défis à garder à l'esprit :
- Coûts computationnels plus élevés : Travailler avec des données 3D nécessite des ressources matérielles plus puissantes, et le coût peut augmenter rapidement.
- Exigences en données plus complexes : La détection d'objets 3D repose souvent sur des capteurs avancés comme le LiDAR, qui peuvent être coûteux et pas nécessairement disponibles dans tous les environnements.
- Collecte et traitement des données : Les exigences complexes en matière de données de la détection d'objets 3D rendent la collecte, la préparation et le traitement des grands jeux de données nécessaires pour entraîner les modèles à la fois chronophages et intensifs en ressources.
- Complexité accrue des modèles : Les modèles utilisés pour la détection d'objets 3D sont généralement plus compliqués, avec plus de couches et de paramètres que ceux utilisés pour la détection d'objets 2D.
Link to this sectionApplications de la détection d'objets 3D#
Maintenant que nous avons discuté des avantages et des inconvénients de la détection d'objets 3D, examinons de plus près certains de ses cas d'utilisation.
Link to this sectionVéhicules autonomes#
Dans les voitures autonomes, la détection d'objets 3D est vitale pour percevoir l'environnement autour de la voiture. Elle permet aux véhicules de détecter les piétons, les autres voitures et les obstacles. Elle fournit également des informations précises sur leur position, leur taille et leur orientation dans le monde réel. Les données détaillées obtenues grâce aux systèmes de détection d'objets 3D sont utiles pour une expérience de conduite autonome beaucoup plus sûre pour les passagers à bord.
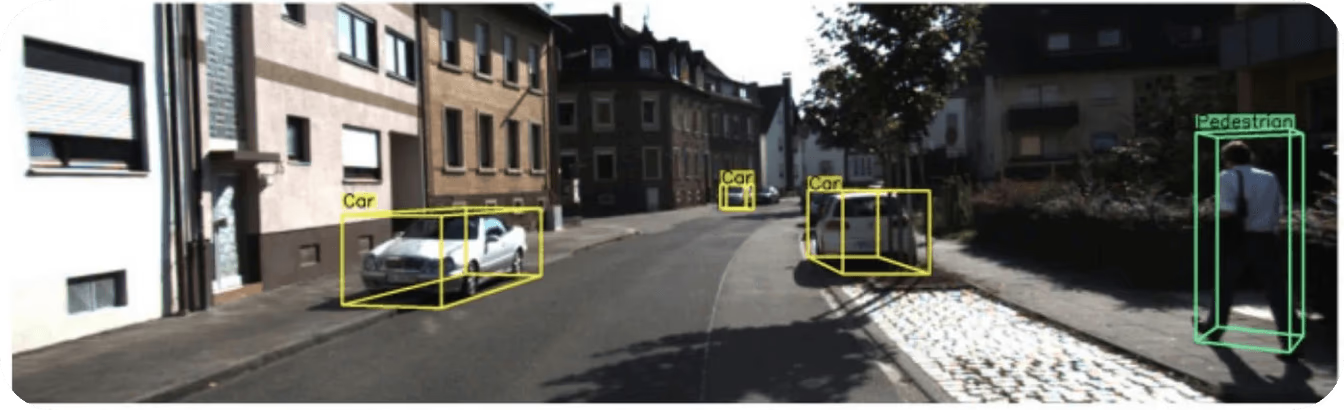
Fig 6. Utilisation de la détection d'objets 3D dans les véhicules autonomes. (source: towardsdatascience.com)
Link to this sectionRobotique#
Les systèmes robotiques utilisent la détection d'objets 3D pour plusieurs applications. Ils l'utilisent pour naviguer à travers différents types d'environnements, ramasser et placer des objets, et interagir avec leur environnement. De tels cas d'utilisation sont particulièrement importants dans des cadres dynamiques comme les entrepôts ou les installations de fabrication, où les robots doivent comprendre les agencements tridimensionnels pour fonctionner efficacement.
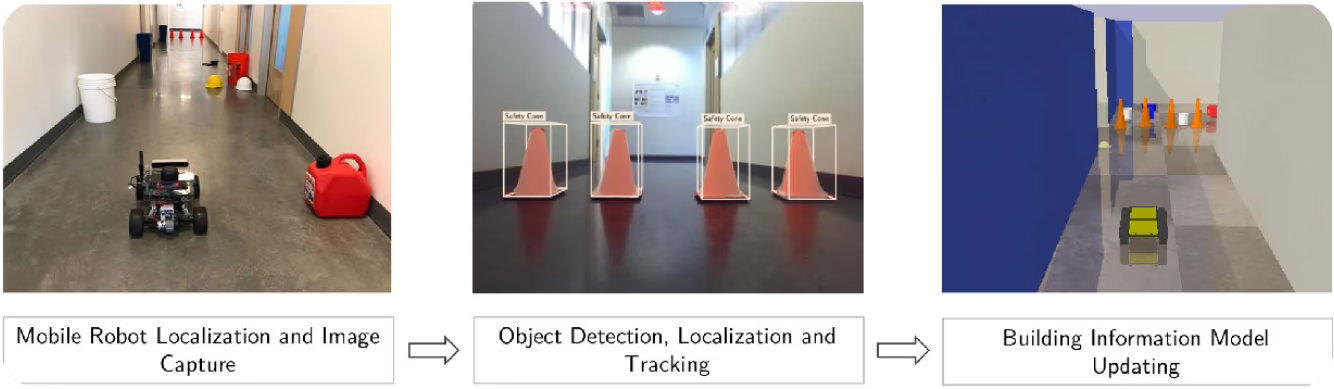
Fig 7. Un robot mobile utilisant la détection d'objets 3D.
Link to this sectionRéalité augmentée et virtuelle (AR/VR)#
Un autre cas d'utilisation intéressant de la détection d'objets 3D se trouve dans les applications de réalité augmentée et virtuelle. La détection d'objets 3D est utilisée pour placer avec précision des objets virtuels dans un environnement VR ou AR réaliste. Cela augmente l'expérience utilisateur globale de ces technologies. Elle permet également aux systèmes VR/AR de reconnaître et de suivre des objets physiques, créant des environnements immersifs où les éléments numériques et physiques interagissent de manière transparente. Par exemple, les joueurs utilisant des casques AR/VR peuvent bénéficier d'une expérience beaucoup plus immersive grâce à la détection d'objets 3D. Cela rend les interactions avec des objets virtuels dans des espaces 3D beaucoup plus engageantes.
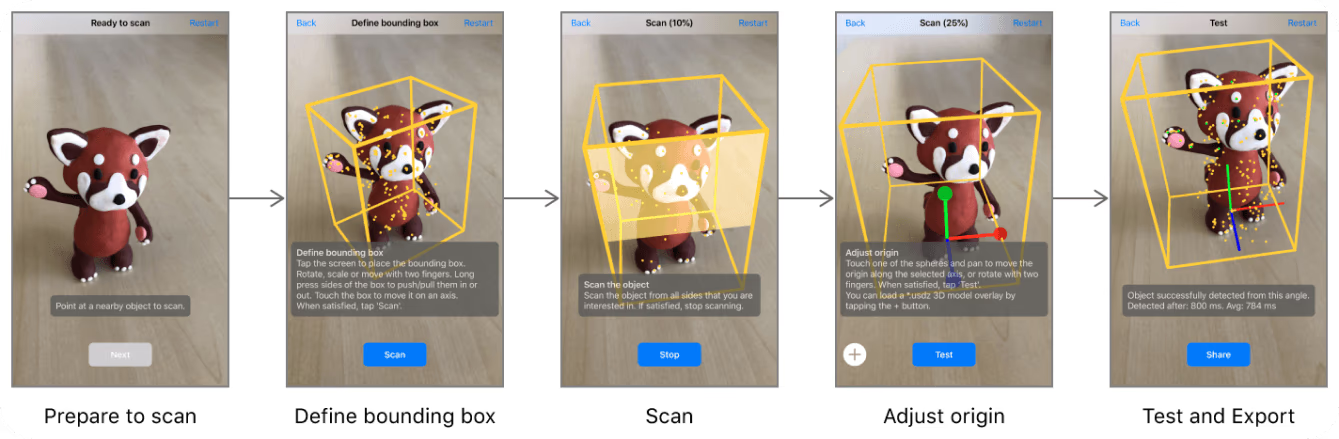
Fig 8. Un exemple de reconnaissance d'objets 3D utilisée pour une application AR.
Link to this sectionRéflexions finales sur la détection d'objets 3D#
La détection d'objets 3D permet aux systèmes de comprendre la profondeur et l'espace plus efficacement que les méthodes de détection d'objets 2D. Elle joue un rôle clé dans des applications comme les voitures autonomes, les robots et l'AR/VR, où il est important de connaître la taille, la distance et la position d'un objet. Bien que la détection d'objets 3D nécessite plus de puissance de traitement et des données complexes, sa capacité à fournir des informations précises et détaillées en fait un outil très précieux dans de nombreux domaines. À mesure que la technologie progresse, l'efficacité et l'accessibilité de la détection d'objets 3D s'amélioreront probablement, ouvrant la voie à une adoption encore plus large et à une innovation à travers diverses industries.
Reste connecté avec notre communauté pour suivre les dernières nouveautés en IA ! Visite notre dépôt GitHub pour voir comment nous utilisons l'IA pour créer des solutions de pointe dans des industries comme la fabrication et la santé. 🚀






