Explora cómo funcionan las aplicaciones de la visión artificial
Sumérgete con nosotros en las aplicaciones de la visión artificial. También repasaremos varias tareas de visión artificial como la detección de objetos y la segmentación.

Cuando exploramos la historia de los modelos de visión artificial, vimos cómo ha evolucionado la visión artificial y el camino que ha llevado a los modelos de visión avanzados que tenemos hoy en día. Modelos modernos como Ultralytics YOLOv8 admiten múltiples tareas de visión artificial y se utilizan en diversas aplicaciones interesantes.
En este artículo, echaremos un vistazo a los fundamentos de la visión artificial y los modelos de visión. Cubriremos cómo funcionan y sus diversas aplicaciones en múltiples sectores. Las innovaciones en visión artificial están en todas partes, dando forma a nuestro mundo en silencio. ¡Descubrámoslas una a una!
Link to this section¿Qué es la visión artificial?#
La inteligencia artificial (IA) es un término general que abarca muchas tecnologías destinadas a replicar una parte de la inteligencia humana. Un subcampo de la IA es la visión artificial. La visión artificial se centra en dotar a las máquinas de ojos que puedan ver, observar y comprender su entorno.
Al igual que la visión humana, las soluciones de visión artificial tienen como objetivo distinguir objetos, calcular distancias y detectar movimientos. Sin embargo, a diferencia de los humanos, que cuentan con toda una vida de experiencias para ayudarnos a ver y comprender, los ordenadores dependen de grandes cantidades de datos, cámaras de alta definición y algoritmos complejos.
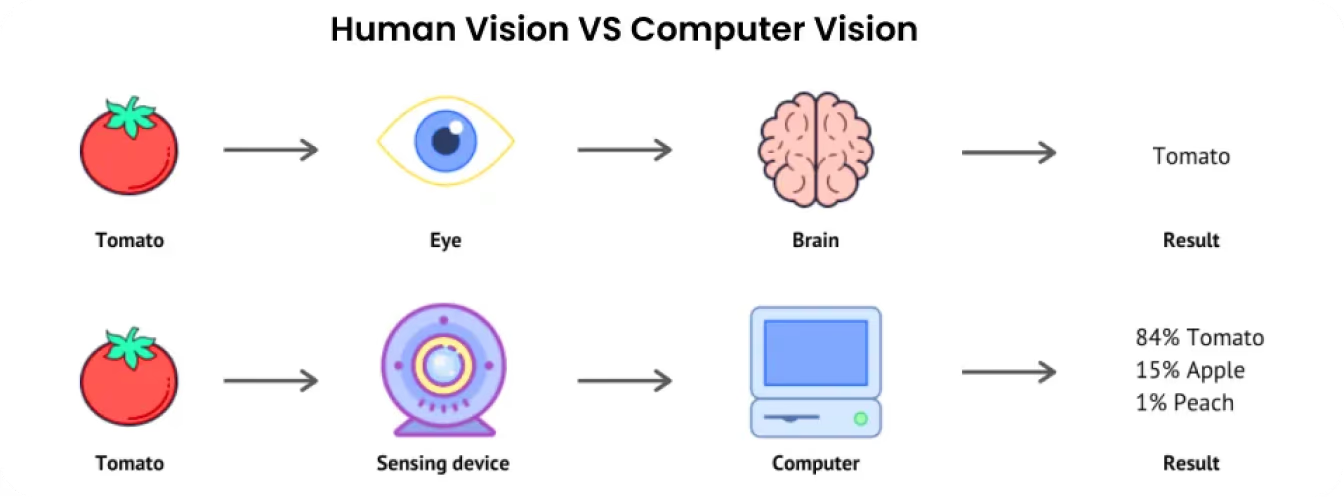
Fig 1. Comparando la visión humana y la visión artificial.
Los sistemas de visión artificial pueden procesar y analizar datos visuales como imágenes y vídeos con una velocidad y precisión increíbles. La capacidad de analizar rápida y precisamente grandes cantidades de información visual convierte a la visión artificial en una herramienta potente en varios sectores, desde la fabricación hasta la sanidad.
Link to this sectionLos modelos de visión admiten varias tareas de visión artificial#
Los modelos de visión artificial son el núcleo de cualquier aplicación de visión artificial. Son esencialmente algoritmos computacionales impulsados por técnicas de aprendizaje profundo diseñados para dotar a las máquinas de la capacidad de interpretar y comprender la información visual. Los modelos de visión permiten realizar tareas cruciales de visión artificial que van desde la clasificación de imágenes hasta la detección de objetos. Echemos un vistazo más de cerca a algunas de estas tareas y sus casos de uso con más detalle.
Link to this sectionClasificación de imágenes#
La clasificación de imágenes consiste en categorizar y etiquetar imágenes en clases o categorías predefinidas. Un modelo de visión como YOLOv8 puede entrenarse con grandes datasets de imágenes etiquetadas. Durante el entrenamiento, el modelo aprende a reconocer patrones y características asociados a cada clase. Una vez entrenado, puede predecir la categoría de imágenes nuevas y nunca vistas analizando sus características y comparándolas con los patrones aprendidos.
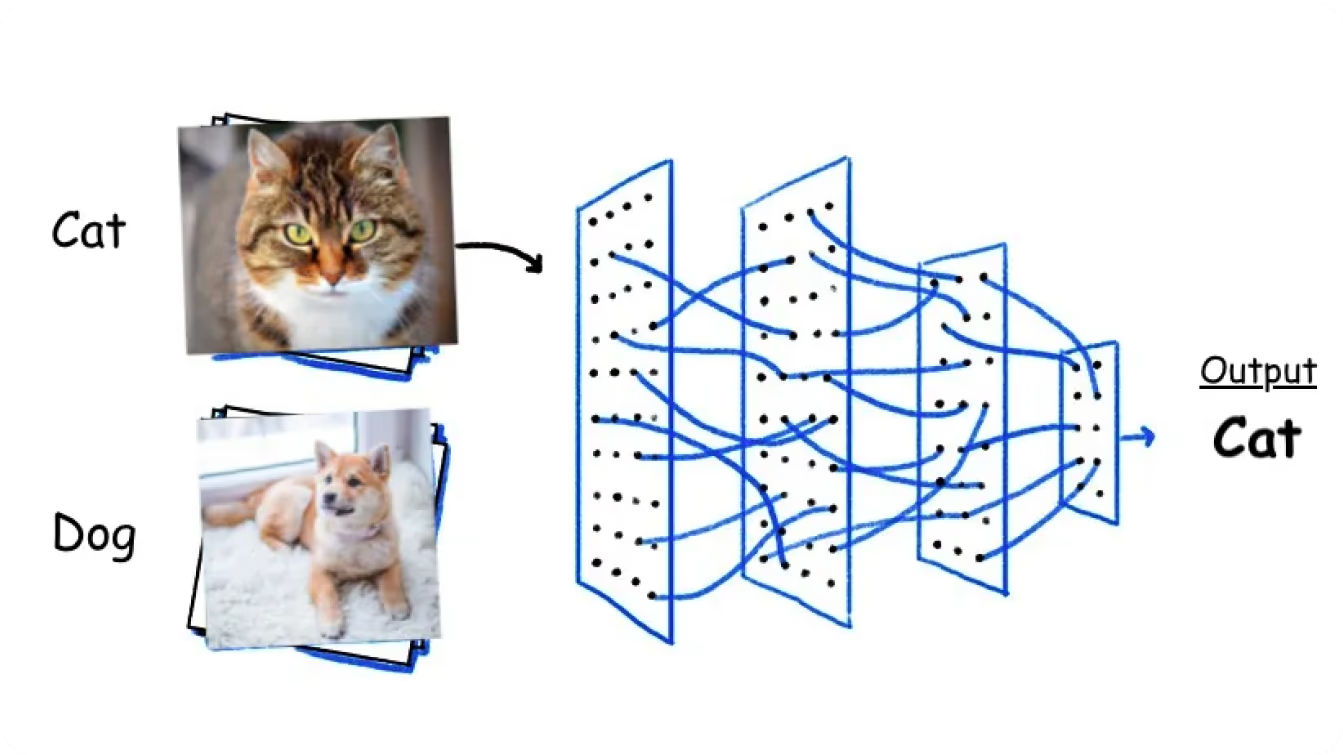
Fig 2. Un ejemplo de clasificación de imágenes. (fuente: towardsdatascience.com)
Existen diferentes tipos de clasificación de imágenes. Por ejemplo, al tratar con imágenes médicas, puedes usar la clasificación binaria para dividir las imágenes en dos grupos, como sano o enfermo. Otro tipo es la clasificación multiclase. Puede ayudar a clasificar imágenes en muchos grupos, como clasificar diferentes animales en una granja como cerdos, cabras y vacas. O bien, supongamos que quieres clasificar animales en grupos y subgrupos, como clasificar animales en mamíferos y aves, y luego subdividirlos en especies como leones, tigres, águilas y gorriones; la clasificación jerárquica sería la mejor opción.
Link to this sectionDetección de objetos#
La detección de objetos es el proceso de identificar y localizar objetos en imágenes y fotogramas de vídeo mediante visión artificial. Consiste en dos tareas: la localización de objetos, que dibuja cuadros delimitadores (bounding boxes) alrededor de los objetos, y la clasificación de objetos, que identifica la categoría de cada uno. Basándose en las anotaciones de los cuadros delimitadores, un modelo de visión puede aprender a reconocer patrones y características específicas de cada categoría de objeto y predecir la presencia y ubicación de estos objetos en imágenes nuevas y nunca vistas.
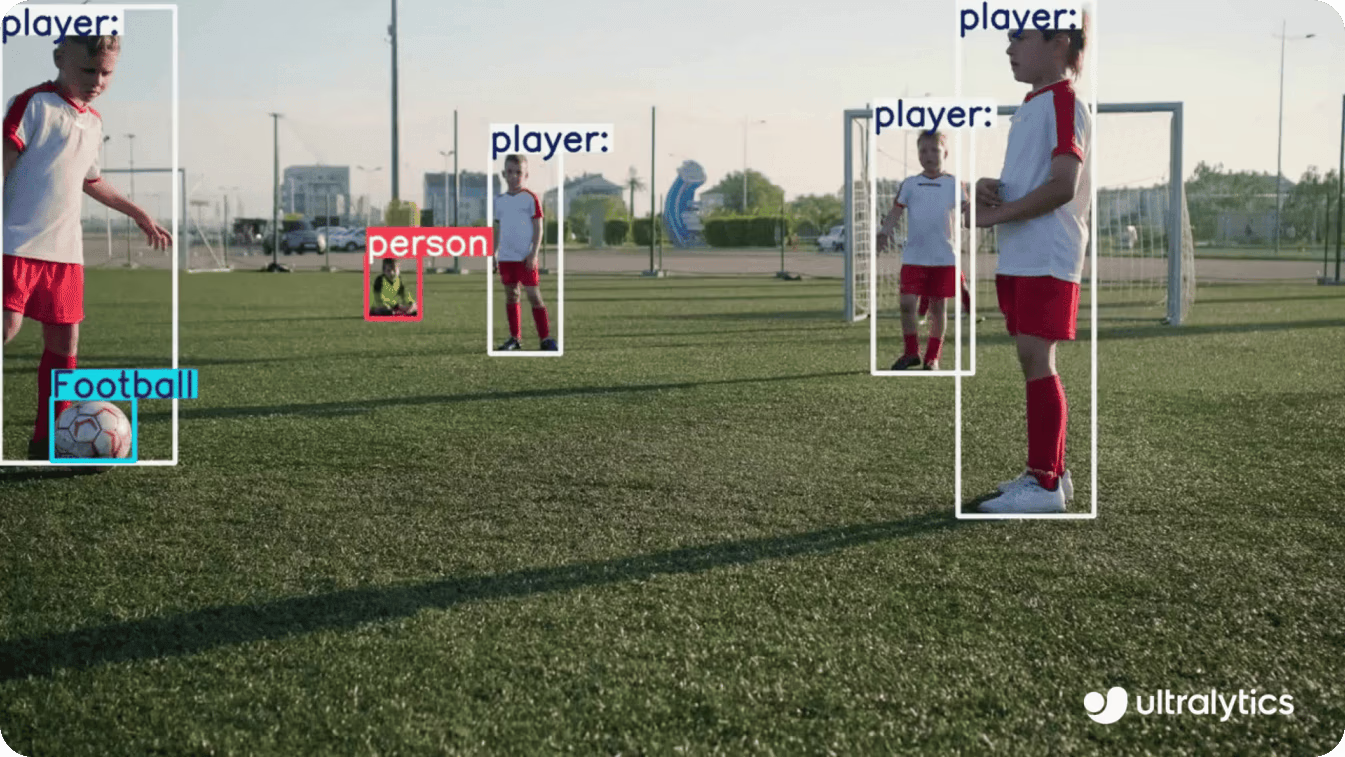
Fig 3. Detección de objetos con YOLOv8 utilizada para detectar jugadores en un campo de fútbol.
La detección de objetos tiene muchos casos de uso en diferentes sectores, desde el deporte hasta la biología marina. Por ejemplo, en el comercio minorista, la tecnología Just Walk Out de Amazon utiliza la detección de objetos para automatizar el pago identificando los artículos que los clientes recogen. Una combinación de visión artificial y datos de sensores permite a los clientes coger sus artículos y marcharse sin esperar colas.
Aquí tienes un vistazo más de cerca a cómo funciona:
- Las cámaras montadas en el techo capturan a los clientes moviéndose por la tienda, y esta grabación de vídeo es procesada en tiempo real por modelos de visión.
- La detección de objetos se utiliza para identificar exactamente el producto que un cliente coge y coloca en su cesta para actualizar su carrito virtual en consecuencia.
- Los sensores de peso en las estanterías mejoran la precisión al detectar la retirada o sustitución de artículos.
- A medida que el cliente sale de la tienda, se pueden utilizar la detección de objetos y la tecnología de reconocimiento facial para confirmar que el cliente se ha marchado, y sus datos de pago, como una tarjeta de crédito, pueden utilizarse para cobrarle automáticamente.
Link to this sectionSegmentación semántica e instanciada#
La segmentación semántica y la segmentación instanciada son tareas de visión artificial que ayudan a dividir las imágenes en segmentos significativos. La segmentación semántica clasifica los píxeles según su significado semántico y trata todos los objetos dentro de una categoría como una única entidad con la misma etiqueta. Es adecuada para etiquetar objetos incontables como "el cielo" o el "océano" o agrupaciones como "hojas" o "hierba".
La segmentación instanciada, por otro lado, puede distinguir diferentes instancias de la misma clase asignando una etiqueta única a cada objeto detectado. Puedes utilizar la segmentación instanciada para segmentar objetos contables donde el número y la independencia de los objetos son importantes. Permite una identificación y diferenciación más precisas.

Fig 4. Un ejemplo de segmentación semántica e instanciada.
Podemos entender el contraste entre la segmentación semántica y la instanciada más claramente con un ejemplo relacionado con los coches autónomos. La segmentación semántica es ideal para tareas que requieren entender el contenido de una escena y puede utilizarse en vehículos autónomos para clasificar características en la carretera, como pasos de peatones y señales de tráfico. Mientras tanto, la segmentación instanciada puede utilizarse en vehículos autónomos para diferenciar entre peatones, vehículos y obstáculos individuales.
Link to this sectionEstimación de pose#
La estimación de poses es una tarea de visión artificial centrada en detectar y rastrear los puntos clave de las poses de un objeto en imágenes o vídeos. Se utiliza principalmente para la estimación de poses humanas, con puntos clave que incluyen áreas como hombros y rodillas. Estimar la pose de un humano nos ayuda a comprender y reconocer acciones y movimientos que son críticos para diversas aplicaciones.

Fig 5. Un ejemplo de estimación de poses usando YOLOv8.
La estimación de poses puede utilizarse en el deporte para analizar cómo se mueven los atletas. La NBA utiliza la estimación de poses para estudiar los movimientos y posiciones de los jugadores durante el partido. Al rastrear puntos clave como hombros, codos, rodillas y tobillos, la estimación de poses proporciona información detallada sobre los movimientos de los jugadores. Estos conocimientos ayudan a los entrenadores a desarrollar mejores estrategias, optimizar los programas de entrenamiento y hacer ajustes en tiempo real durante los partidos. Además, los datos pueden ayudar a controlar la fatiga y el riesgo de lesiones de los jugadores para mejorar su salud y rendimiento generales.
Link to this sectionDetección de objetos con cuadros delimitadores orientados#
La detección de objetos con cuadros delimitadores orientados (OBB, por sus siglas en inglés) utiliza rectángulos rotados para identificar y localizar objetos con precisión en una imagen. A diferencia de los cuadros delimitadores estándar que se alinean con los ejes de la imagen, los OBB rotan para coincidir con la orientación del objeto. Esto los hace especialmente útiles para objetos que no están perfectamente horizontales o verticales. Son excelentes para localizar con precisión y aislar objetos rotados para evitar solapamientos en entornos abarrotados.
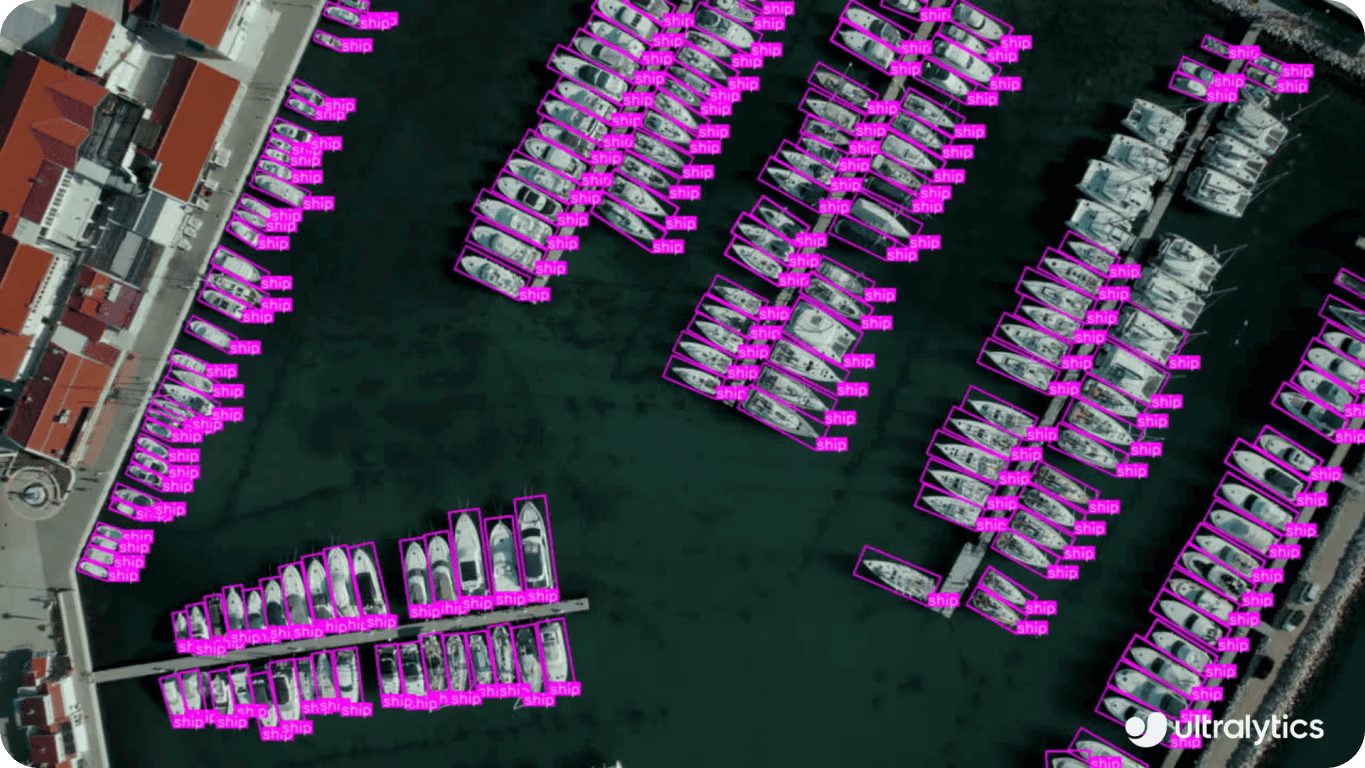
Fig 6. Un ejemplo de detección de cuadros delimitadores orientados en una imagen aérea de barcos usando YOLOv8.
En la vigilancia marítima, identificar y rastrear barcos es clave para la seguridad y la gestión de recursos. La detección OBB puede utilizarse para la localización precisa de barcos, incluso cuando están muy juntos u orientados en varios ángulos. Ayuda a controlar las rutas de navegación, gestionar el tráfico marítimo y optimizar las operaciones portuarias. También puede ayudar en la respuesta ante desastres identificando y evaluando rápidamente los daños a los barcos y a la infraestructura tras eventos como huracanes o vertidos de petróleo.
Link to this sectionRastreo de objetos#
Hasta ahora, hemos hablado de tareas de visión artificial que tratan con imágenes. El rastreo de objetos es una tarea de visión artificial que puede rastrear un objeto a través de los fotogramas de un vídeo. Comienza identificando el objeto en el primer fotograma mediante algoritmos de detección y luego sigue continuamente su posición a medida que se mueve a través del vídeo. El rastreo de objetos implica técnicas como la detección de objetos, la extracción de características y la predicción de movimiento para mantener el rastreo preciso.
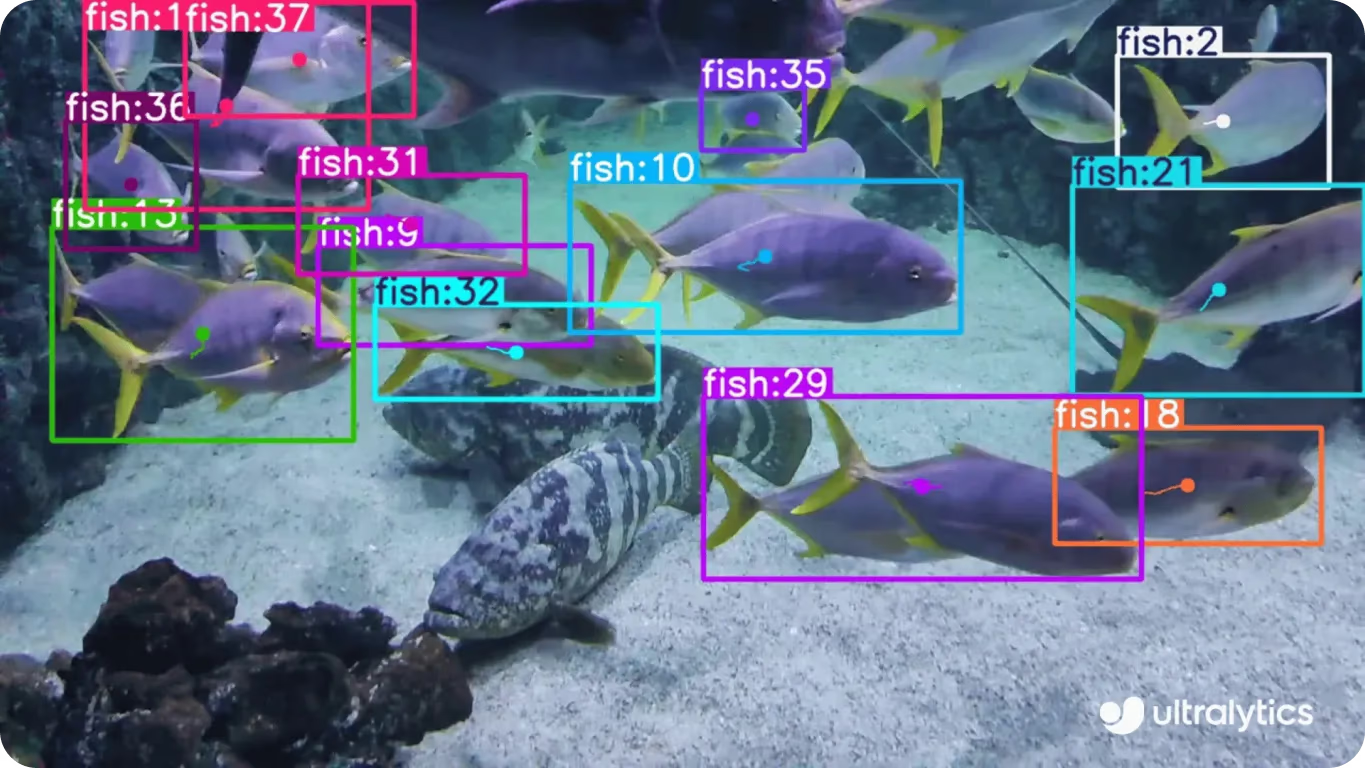
Fig 7. Usando YOLOv8 para rastrear peces.
Los modelos de visión como YOLOv8 pueden utilizarse para rastrear peces en la biología marina. Utilizando cámaras submarinas, los investigadores pueden supervisar los movimientos y comportamientos de los peces en sus hábitats naturales. El proceso comienza detectando peces individuales en los primeros fotogramas y luego sigue sus posiciones a lo largo de todo el vídeo. Rastrear peces ayuda a los científicos a comprender los patrones migratorios, los comportamientos sociales y las interacciones con el entorno. También apoya las prácticas pesqueras sostenibles proporcionando información sobre la distribución y abundancia de los peces.
Link to this sectionUna mirada final a la visión artificial#
La visión artificial está cambiando activamente cómo utilizamos la tecnología e interactuamos con el mundo. Al utilizar modelos de aprendizaje profundo y algoritmos complejos para comprender imágenes y vídeos, la visión artificial ayuda a los sectores a agilizar muchos procesos. Tareas de visión artificial como la detección y el rastreo de objetos hacen posible crear soluciones que antes no se habían imaginado. A medida que la tecnología de visión artificial sigue mejorando, ¡el futuro nos reserva muchas más aplicaciones innovadoras!
¡Aprendamos y crezcamos juntos! Explora nuestro repositorio de GitHub para ver nuestras contribuciones a la IA. Echa un vistazo a cómo estamos redefiniendo industrias como la de los coches autónomos y la agricultura con IA. 🚀






