Bilgisayarlı görü modellerinin üretimde başarısız olmasının 5 nedeni
Veri uyumsuzluğundan gecikmeye kadar, bilgisayarlı görü modellerinin üretimde neden başarısız olduğunu ve ekiplerin gerçek dünya yapay zeka görü sistemlerinde model performansını nasıl artırabileceğini öğren.

Bilgisayarlı görü, artık çoğu sektörde benimsenen ve makinelerin görsel verileri çeşitli görevler için yorumlayıp analiz etmesini sağlayan önemli bir yapay zeka teknolojisidir. Bu sistemler, tıbbi görüntüleme ve robotikten üretim ve perakende otomasyonuna kadar pek çok gerçek dünya uygulamasını destekler.
Ancak bir bilgisayarlı görü sistemi oluşturmak her zaman kolay değildir. Bu süreç genellikle nesne algılama ve takip gibi görevleri desteklemek için görüntüler ve videolardaki desenleri tanımlamak üzere eğitilen bir vision AI model geliştirmeyi içerir.
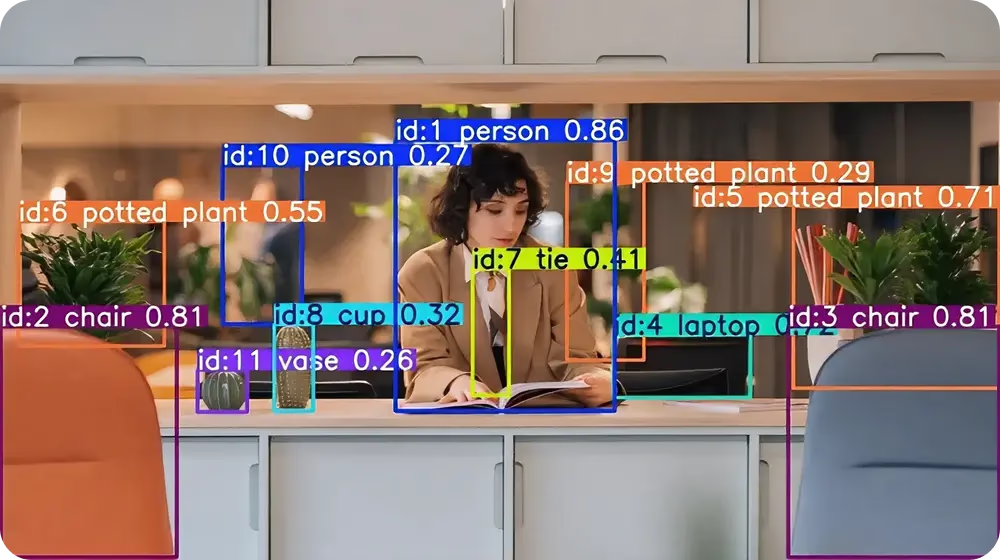
Şekil 1. Nesne algılama ve takip örneği (Kaynak)
Yıllar içinde daha gelişmiş hale gelmelerine rağmen, bilgisayarlı görü modelleri hala geliştirme aşamasında, gerçek dünya ortamlarına dağıtıldıktan sonraki hallerinden farklı davranışlar sergileyebilir. Bunun nedeni, modelleri kontrollü geliştirme ortamlarının dışında çalıştırmanın yeni ve genellikle beklenmedik zorluklar ortaya çıkarmasıdır.
Veri kümelerindeki çeşitlilik eksikliği, zayıf model izleme ve altyapı kısıtlamaları gibi faktörler, aynı modelin dağıtımdan sonra gerçek dünyada farklı davranmasına neden olabilir.
Bu makalede, bilgisayarlı görü modellerinin üretim ortamında başarısız olmasının beş yaygın nedenini inceleyeceğiz. Hadi başlayalım!
Link to this sectionModel eğitimi ile üretim arasındaki boşluk#
Model eğitimi genellikle kontrollü bir ortamda gerçekleşir. Bu aşamada yapay zeka geliştiricileri, özenle hazırlanmış eğitim veri kümeleriyle çalışırlar.
Bu geniş görsel veri koleksiyonları, iyi yapılandırılmış açıklamalar veya her görüntünün içeriğini tanımlayan etiketler içerir. Eğitim ayrıca tutarlı koşullar altında gerçekleşir, bu da vision AI modellerinin görsel desenleri etkili bir şekilde öğrenmesini mümkün kılar.
Bu desenlerin doğru öğrenildiğinden emin olmak için modeller, geliştirme aşamasında standart değerlendirme metrikleri ve kıyaslama (benchmark) veri kümeleri kullanılarak sistematik bir şekilde değerlendirilebilir. Eğitim veri kümelerine benzer şekilde, bu kıyaslama veri kümeleri de özenle hazırlanır.
Ancak, gerçek dünya bilgisayarlı görü sistemlerinin karşılaştığı veriler, eğitim ve değerlendirme sırasında kullanılan verilerden çok farklı olabilir. Dağıtıldıktan sonra, bu modeller nadiren kontrollü koşullar altında çalışır.
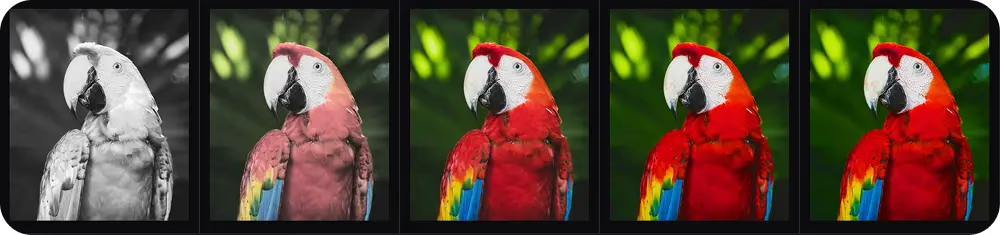
Sürekli değişen aydınlatma, değişen kamera açıları ve zamanla farklılaşan arka planlar gibi öngörülemeyen ortamlardan gelen görüntü ve videoları işlemek zorunda kalabilirler. Örneğin, trafik algılama için eğitilmiş bir vision AI modeli, öncelikli olarak gündüz görüntüleri üzerinde eğitilmiş ve değerlendirilmişse, gece araçları tespit etmekte zorlanabilir.

Şekil 2. İyileştirmeden sonra bile, gece görüntüleri gün ışığı görüntüleri üzerinde eğitilmiş modellerin yorumlaması için zordur. (Kaynak)
Geliştirme ve gerçek dünya dağıtımı arasındaki bu fark, eğitim-üretim boşluğudur. Bu boşluk nedeniyle, birçok model hatası ancak dağıtımdan sonra görünür hale gelir, bu da daha güvenilir ve sağlam bilgisayarlı görü sistemleri oluşturmak için erken farkındalığı şart kılar.
Link to this sectionBilgisayarlı görü modellerinin üretim ortamında başarısız olmasının 5 yaygın nedeni#
Şimdi, bilgisayarlı görü modellerinin üretim ortamında başarısız olmasının beş yaygın nedenine daha yakından bakalım.
Link to this sectionDüşük kaliteli eğitim veri kümeleri#
Veri kümeleri, modelin eğitim sırasında neyi öğrendiğini ve dağıtımdan sonra gerçek dünya girdilerine nasıl yanıt verdiğini belirledikleri için bilgisayarlı görü modellerinin eğitilmesinde merkezi bir rol oynar. Bu, modellerin her görüntünün neyi temsil ettiğini gösteren etiketli örneklerden öğrendiği denetimli öğrenmede özellikle önemlidir.
Evrişimli sinir ağları (CNNs) dahil olmak üzere birçok derin öğrenme modeli, görsel verilerdeki desenleri tanımak için bu etiketli örneklere güvenir. Ancak, eğitim veri kümesi gerçek dünya koşullarını yansıtmadığında, model nesnelerin eğitim verileri dışında nasıl göründüğünü tam olarak temsil etmeyen desenler öğrenebilir.
Örneğin, büyük çatlak kusurlarından oluşan bir veri kümesi üzerinde eğitilmiş bir model, gerçek dünya üretim iş akışlarında nadir görülen küçük bir çatlak türünü tespit edemeyebilir. Benzer şekilde, açıklama kalitesi de model davranışını etkileyebilir. Etiketli verilerdeki tutarsız etiketler veya eksik ayrıntılar, modelin eğitim sırasında yanlış bilgi öğrenmesine neden olabilir.

Şekil 3. Görüntü açıklamalarına bir bakış (Kaynak)
Eğitim verilerinin kalitesi ve çeşitliliği genel olarak kritiktir ve bir modelin gerçek dünya uygulamalarında ne kadar iyi performans gösterdiğini belirleyebilir. Veri kümeleri temsil edici ve doğru bir şekilde etiketlendiğinde, bir model dağıtıldıktan sonra genellikle daha güvenilir bir performans sergiler.
Link to this sectionAşırı uyum (Overfitting) ve genelleme#
Görü modelleri gibi makine öğrenimi modelleri, eğitim veri kümelerinden desenler öğrenir. Ancak bazen bir model birkaç desene aşırı derecede güvenebilir.
Daha geniş görsel ilişkileri öğrenmek yerine, eğitim verilerindeki sınırlı desenleri ezberleyebilir. Bu davranış, aşırı uyum (overfitting) olarak bilinir.
Overfitting genellikle eğitim veri kümeleri küçük olduğunda veya yeterli veri çeşitliliğinden yoksun olduğunda gerçekleşir. Böyle durumlarda model, daha önce gördüğü görüntüleri tanımada iyi hale gelir ancak yeni verileri veya tanıdık olmayan girdileri yorumlamada zorluk çeker.
Bu nedenle, bir model test girdilerinde (eğitim verilerine benzer oldukları için) iyi performans gösterebilir ancak dağıtımdan sonra yeni koşullar altında farklı davranabilir. İşte bu yüzden genelleme kavramı hayati önem taşır. Basitçe ifade etmek gerekirse, modellerin eğitim sırasında öğrendiklerini yeni senaryolara ne kadar iyi uygulayabildiğidir.
Overfitting'i azaltmak için yapay zeka meraklıları genellikle modelleri daha çeşitli veri kümeleri üzerinde eğitir ve veride daha fazla varyasyon oluşturmak için eğitim görüntülerini hafifçe değiştiren bir yöntem olan veri artırma (data augmentation) uygularlar. Bu hususlar olmadan, sistem gerçek dünya ortamlarında çalışmaya başladığında model performansı hızla düşebilir.
Şekil 4. Veri artırma, bir veri kümesi içinde aynı görüntünün varyasyonlarını oluşturmaya yardımcı olabilir. (Kaynak)
Link to this sectionGerçek dünya ortamlarındaki gizli uç durumlar#
Bilgisayarlı görü modelleri yeni verilere karşı iyi genelleme yapsa bile, gerçek dünya ortamları hala beklenmedik uç durumlar (edge cases) ortaya çıkarabilir. Bunlar, modelin eğitim sırasında öğrendiği tipik desenlerden farklı olan alışılmadık durumlardır.
Bu senaryoların çoğu, nadiren gerçekleştikleri, yeniden oluşturulmaları zor olduğu veya eğitim verisi olarak toplanmaları maliyetli olabildiği için geliştirme sırasında yakalanmaları zordur. Örneğin, nesneler alışılmadık şekillerde görünebilir, öngörülemeyen şekillerde hareket edebilir veya kısmen diğer nesnelerin arkasında gizlenebilir.
Aydınlatma, kamera açıları veya arka plan koşullarındaki değişiklikler de tanımayı daha zorlu hale getiren durumlar yaratabilir. Bu uç durumlar genellikle ancak sistem gerçek dünya uygulamalarında dağıtıldıktan sonra fark edilir hale gelir.
Robotik ve üretim otomasyonunda, örneğin, öğeler beklenenden farklı şekilde yerleştirilebilir veya konumlandırılabilir, bu da modelin başa çıkmak üzere tasarlanmadığı durumlar yaratır. Sonuç olarak, test sırasında güvenilir görünen tahminler, sistem gerçek dünya ortamlarında çalıştığında daha az tutarlı hale gelebilir.
Link to this sectionDağıtım sonrası izleme ve hata ayıklama eksikliği#
Bir vision AI modeli geliştirmenin yanı sıra, performansını izlemek ve iyileştirmek esastır. Ancak, bir sistem çalışmaya başladığında, odak genellikle zaman içindeki performansını yakından takip etmek yerine sadece operasyonel tutmaya kayar. Sonuç olarak, model davranışındaki değişiklikler fark edilmeyebilir.
Aynı zamanda, gelen verilerdeki, kamera kurulumlarındaki veya çalışma ortamlarındaki değişiklikler gibi faktörler, modelin nesneleri ne kadar doğru tespit ettiğini veya sınıflandırdığını kademeli olarak etkileyebilir. Bu değişiklikler her zaman belirgin değildir ve günlük operasyon sırasında fark edilmeyebilir.
Model çıktılarını ve genel sistem davranışını izlemek, ekiplerin bu sorunları daha erken tespit etmesine yardımcı olabilir. Düzenli kontroller, doğrulama rutinleri ve hata ayıklama iş akışları, ekiplerin sıra dışı sonuçları araştırmasına ve bunlara neyin neden olabileceğini anlamasına olanak tanır.
Üretim gibi alanlarda, bir model, kamera yapılandırmasındaki bir değişiklikten sonra montaj hattındaki nesneleri aniden yanlış tanımlayabilir. Dağıtılmış bir vision AI sisteminin nasıl davrandığını takip etmek, bu değişikliklere yanıt vermeyi ve gerçek dünya ortamlarında istikrarlı performansı korumayı kolaylaştırır.
Link to this sectionAltyapı kısıtlamaları ve gecikme#
Birçok bilgisayarlı görü sistemi gerçek zamanlı çalışmalıdır, bu da donanım, ağlar ve işleme hatları üzerinde önemli bir baskı oluşturabilir. Kaynaklar sınırlı olduğunda, hesaplama gecikmeleri veya ağ gecikmesi meydana gelebilir, bu da tahminlerin çok yavaş gelmesine ve genel sistem performansını etkilemesine neden olur.
Bazı durumlarda, gelişmiş derin öğrenme modelleri de altyapı zorlukları yaratabilir. Örneğin, transformer tabanlı mimariler, büyük miktarda görsel veriyi işlemek ve görüntüler içindeki karmaşık ilişkileri öğrenmek için tasarlanmıştır, ancak genellikle önemli hesaplama kaynakları gerektirirler. Bu modelleri çalıştırmak daha güçlü veya pahalı donanımlar gerektirebilir.
Uygun optimizasyon olmadan, test sırasında hızlı çalışan modeller bile dağıtımdan sonra yavaşlayabilir veya tutarsız davranabilir. Bunu çözmek için ekipler genellikle boru hatlarını (pipelines) optimize eder, mümkün olduğunda model karmaşıklığını azaltır ve doğruluk ile hız arasında denge kurar.
Bu, büyük modelleri daha hafif sürümlere sıkıştırmayı, daha verimli mimariler kullanmayı veya sistemin mevcut donanımda sorunsuz çalışması için görüntüleri daha düşük çözünürlükte işlemeyi içerebilir. Birçok durumda, ekipler dağıtım kısıtlamalarını karşılamaya yardımcı olması için Ultralytics YOLO26 gibi hafif ve daha hızlı modelleri tercih eder.
Link to this sectionBilgisayarlı görü modeli başarısızlığını önlemek için en iyi uygulamalar#
İşte bilgisayarlı görü modellerini üretim ortamında dağıtırken başarısızlıkları azaltmaya yardımcı olabilecek bazı en iyi uygulamalar:
- Aşamalı dağıtım stratejileri kullan: Modelleri üretime kademeli olarak dahil et, böylece ekipler davranışlarını gözlemleyebilir ve gerektiğinde ayarlamalar yapabilir.
- Geri bildirim döngülerini dahil et: Yeni görüntüler topla ve modelleri güncellenmiş veri kümeleriyle yeniden eğitmek ve performansı zaman içinde iyileştirmek için hatalı tahminleri incele.
- Model sınırlamalarını belgele: Ekiplerin dağıtım sırasında potansiyel sorunları öngörebilmesi için modelin zorlanabileceği durumları net bir şekilde kaydet.
- Gerçek dünya değişkenliği için tasarım yap: Aydınlatma, kamera açıları, nesne yerleşimi veya arka plan koşullarındaki değişiklikler için önceden planlama yapmak, modellerin farklı çalışma senaryolarında istikrarlı olmasına yardımcı olabilir.
Link to this sectionÖne çıkanlar#
Bilgisayarlı görü modelleri nadiren algoritmaların kendisi zayıf olduğu için başarısız olur. Çoğu durumda, asıl zorluk bu sistemlerin çalıştığı ortamlardan kaynaklanır. Eğitim sırasında iyi performans gösteren modeller, davranışlarını etkileyebilecek öngörülemeyen gerçek dünya koşullarıyla karşılaşır.
İşte bu yüzden güvenilir vision AI sistemleri oluşturmak, sadece bir model eğitmekten fazlasını gerektirir. Ayrıca veri kümelerini özenle hazırlamayı, dağıtımdan sonra model performansını izlemeyi ve sistemleri gerçek dünya koşullarına sürekli olarak uyarlamayı da içerir.
Vision AI konusunu daha derinlemesine keşfetmek ister misin? Topluluğumuza katıl ve otomotivde yapay zeka ve lojistikte bilgisayarlı görü gibi uygulamalar hakkında bilgi edin. Bilgisayarlı görü projelerine başlamak için lisanslama seçeneklerimize göz at. Daha fazla bilgi edinmek için GitHub depomuzu ziyaret et.






