Seguridad vial con Ultralytics YOLO11: detección por IA para calles más seguras
Descubre cómo Ultralytics YOLO11 mejora la seguridad vial con la detección de baches, estimación de velocidad, seguimiento de peatones y reconocimiento de vehículos parados.

Garantizar la seguridad vial es un reto fundamental para los urbanistas, las autoridades de transporte y los sistemas de vehículos autónomos. Cada año se producen millones de accidentes debido a las condiciones peligrosas de las carreteras, la mala visibilidad y los obstáculos inesperados.
Según la Organización Mundial de la Salud (OMS), las lesiones por accidentes de tráfico son una de las principales causas de muerte en todo el mundo, con más de 1,9 millones de fallecimientos al año. Abordar estos problemas requiere soluciones innovadoras que vayan más allá de los métodos de vigilancia tradicionales.
La integración de la inteligencia artificial (IA) y la visión artificial en la seguridad vial ha surgido como un enfoque prometedor. Modelos como Ultralytics YOLO11 ofrecen capacidades potentes para la detección, el seguimiento y la clasificación de objetos en tiempo real, haciendo las carreteras más seguras tanto para conductores como para peatones.
En este artículo, exploraremos los retos clave de la seguridad vial y cómo YOLO11 puede apoyar infraestructuras más inteligentes.
Link to this sectionEntender los retos de la seguridad vial#
A pesar de los avances tecnológicos, la gestión de la seguridad vial sigue enfrentándose a retos importantes:
- Condiciones peligrosas de las carreteras: Los baches, las grietas y los restos en la calzada contribuyen a los daños de los vehículos y a los accidentes, especialmente en zonas con escaso mantenimiento.
- Exceso de velocidad y conducción temeraria: El cumplimiento eficaz de los límites de velocidad sigue siendo un reto en muchas regiones, lo que contribuye a las elevadas tasas de accidentes.
- Riesgos para la seguridad de los peatones: Los pasos de peatones no regulados, la mala visibilidad y la conducción distraída ponen en peligro a los peatones, especialmente en zonas urbanas.
- Interrupciones del tráfico: Los vehículos averiados o parados suelen provocar congestión y aumentar la probabilidad de colisiones por alcance.
Estos retos ponen de relieve la necesidad de sistemas de vigilancia automatizados en tiempo real que puedan mejorar los tiempos de respuesta y aumentar la seguridad vial general. Los modelos de visión artificial como YOLO11 pueden ayudar a abordar estos problemas proporcionando capacidades avanzadas de detección y análisis.
Link to this sectionLa evolución de la visión artificial en la seguridad vial#
La visión artificial para la seguridad vial ha mejorado a medida que han avanzado la IA, la tecnología de sensores y el procesamiento de datos. En sus inicios, los algoritmos de visión artificial se utilizaban principalmente para el reconocimiento automático de matrículas y la vigilancia sencilla del tráfico, ayudando a las fuerzas del orden a detectar infracciones y optimizar el flujo de tráfico.
Estos primeros sistemas se basaban en técnicas de procesamiento de imágenes basadas en reglas, que a menudo tenían una precisión limitada y requerían condiciones meteorológicas y de iluminación ideales para funcionar eficazmente.
La introducción de modelos YOLO de alta velocidad como YOLO11 amplió aún más los límites de la detección en tiempo real en la vigilancia de la seguridad vial.
A diferencia de los métodos tradicionales, que requerían múltiples pasadas sobre una imagen, los modelos YOLO podían procesar fotogramas completos en tiempo real, lo que permitía realizar el seguimiento de vehículos que circulan a gran velocidad, detectar infracciones de carril e identificar defectos en la calzada.
Hoy en día, la visión artificial en los coches ayuda a las ciudades y a las agencias de transporte a utilizar cámaras con IA. Estas cámaras supervisan la velocidad de los vehículos, detectan infracciones de tráfico y localizan peligros en la carretera con escasa intervención humana.
En las iniciativas de ciudades inteligentes, la detección de peatones y el ajuste dinámico de los semáforos, potenciados por algoritmos de visión artificial, pueden ayudar a reducir los accidentes en los pasos de peatones y las intersecciones. Mientras tanto, la investigación sobre vehículos autónomos sigue aprovechando la visión artificial en los sistemas de automoción para la navegación, la evitación de objetos y la concienciación situacional.
Link to this section¿Cómo puede aplicarse YOLO11 a la seguridad vial?#
Al automatizar la vigilancia de las carreteras y mejorar las capacidades de detección, exploremos algunas de las formas clave en las que YOLO11 puede contribuir a unas condiciones de circulación más seguras.
Link to this sectionDetección de baches#
Los baches son una preocupación importante para la seguridad vial, ya que provocan daños en los vehículos, aumentan los costes de mantenimiento y provocan accidentes. Las inspecciones tradicionales de carreteras se basan en evaluaciones manuales, que pueden ser lentas e ineficaces.
Con YOLO11, la detección de baches puede automatizarse mediante el análisis de imágenes en tiempo real captadas por cámaras instaladas en vehículos o drones. YOLO11 puede entrenarse para detectar grietas, baches y deformaciones de la superficie, permitiendo a los municipios y a las autoridades viales priorizar las reparaciones de forma más eficiente.
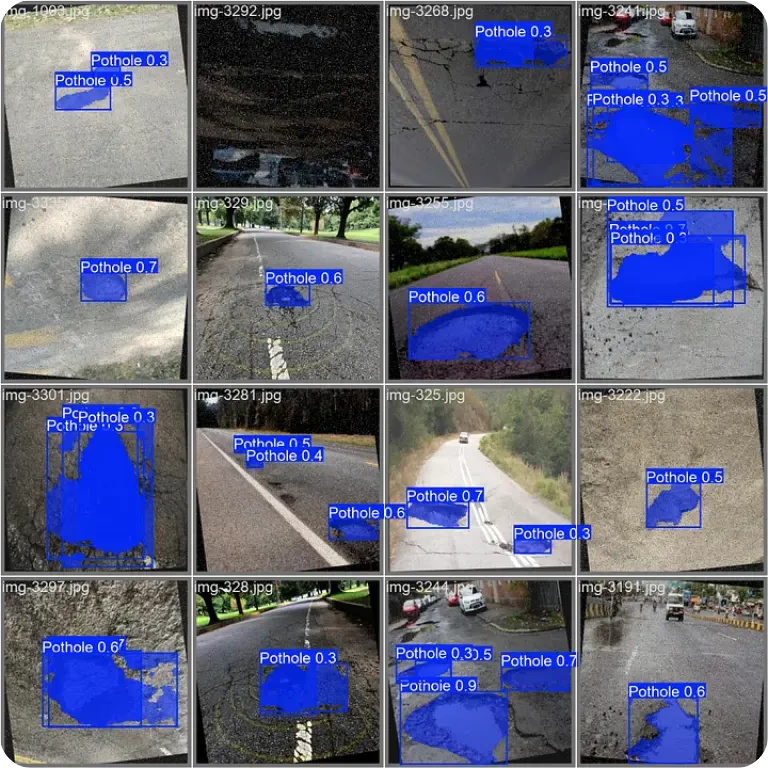
Fig 1. YOLO11 identifica baches en las carreteras mediante detección de objetos, lo que permite la vigilancia automatizada del estado de las carreteras y una programación eficaz del mantenimiento.
Por ejemplo, los equipos de mantenimiento de autopistas pueden desplegar drones equipados con YOLO11 para escanear las carreteras y generar informes detallados sobre su estado. Estos datos pueden utilizarse para programar reparaciones a tiempo, minimizando los riesgos para los conductores y mejorando la calidad general de la infraestructura.
Más allá del mantenimiento, la integración de la detección de baches en los sistemas de vehículos autónomos podría ayudar a los coches autoconducidos a detectar los baches en tiempo real, permitiéndoles ajustar su ruta o reducir la velocidad al acercarse a tramos de carretera dañados. Esto no solo reduciría el desgaste de los vehículos, sino que también minimizaría las frenadas bruscas, que pueden contribuir a la congestión del tráfico y a las colisiones por alcance.
Link to this sectionEstimación de la velocidad#
El exceso de velocidad es una de las principales causas de accidentes, pero su control eficaz sigue siendo un reto. YOLO11 puede ayudar a estimar la velocidad de los vehículos analizando las imágenes de vídeo de las cámaras de carretera. Mediante el seguimiento de los vehículos fotograma a fotograma, YOLO11 puede calcular su velocidad en tiempo real y proporcionar información valiosa para el control del tráfico.
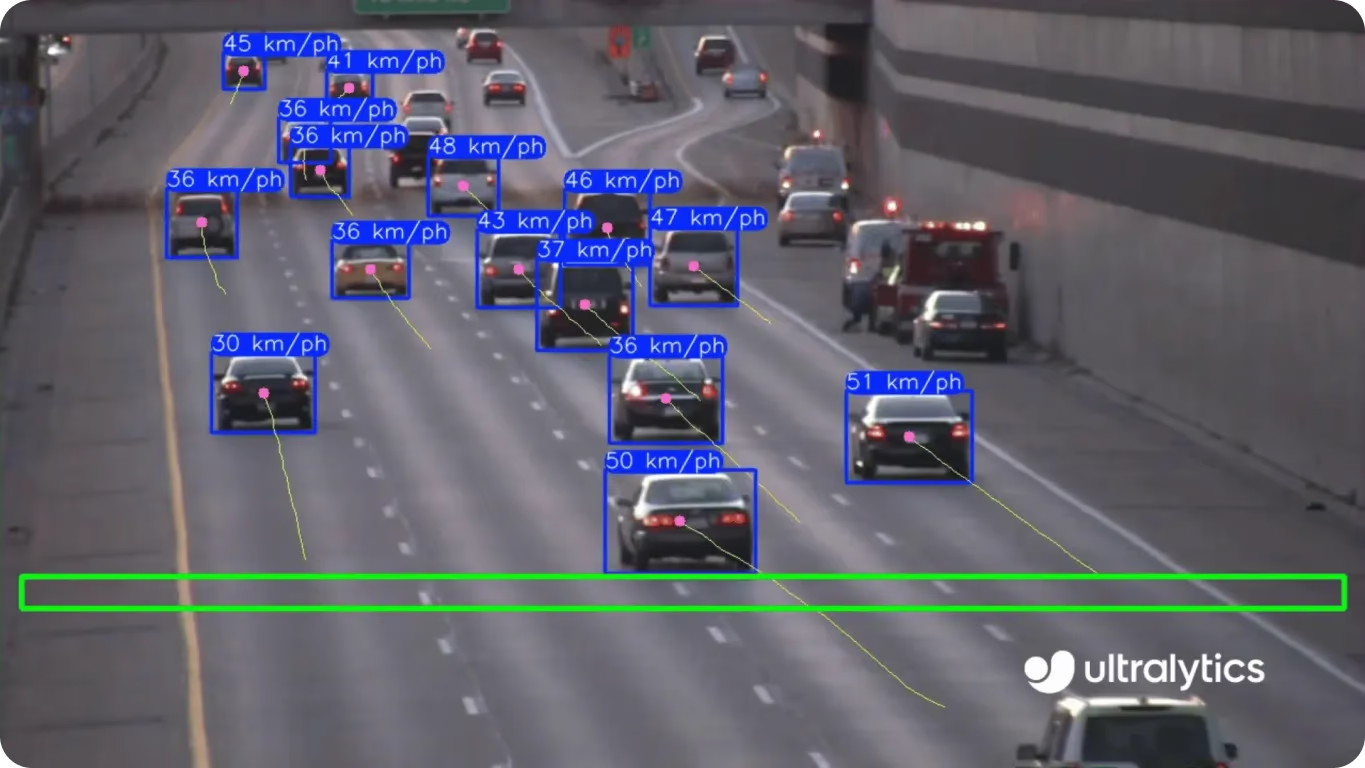
Fig 2. YOLO11 estima la velocidad de los vehículos en una autopista, proporcionando datos para la gestión y el control del tráfico a fin de mejorar la seguridad vial y el control de la congestión.
Por ejemplo, las autoridades de transporte pueden integrar YOLO11 en los sistemas de vigilancia del tráfico existentes para controlar los puntos conflictivos por exceso de velocidad. Estos datos pueden fundamentar decisiones políticas, como ajustar los límites de velocidad en zonas de alto riesgo o desplegar fuerzas de seguridad en lugares específicos.
Además, las capacidades de estimación de velocidad de YOLO11 pueden utilizarse en iniciativas de ciudades inteligentes para mejorar el flujo del tráfico y reducir la congestión. Al analizar la velocidad de los vehículos en distintos tramos de carretera, los urbanistas pueden optimizar los semáforos y redirigir los vehículos de forma dinámica.
Link to this sectionDetección de peatones#
La seguridad de los peatones es una preocupación creciente en las zonas urbanas, donde el alto volumen de tráfico y la conducción distraída contribuyen a accidentes frecuentes. Los sistemas de vigilancia tradicionales suelen tener dificultades para detectar con precisión a los peatones, especialmente en condiciones de poca luz.
YOLO11 puede mejorar la detección de peatones identificando a las personas que cruzan la calle, esperan en las intersecciones o circulan cerca de vehículos en movimiento. Las cámaras instaladas en semáforos o vehículos autónomos pueden utilizar YOLO11 para detectar peatones en tiempo real y ajustar los semáforos en consecuencia.
Para garantizar una detección precisa de los peatones, YOLO11 puede entrenarse con grandes datasets que contengan imágenes etiquetadas de peatones en diversos entornos, como pasos de peatones, aceras e intersecciones. Estos conjuntos de datos tienen en cuenta diferentes ángulos, oclusiones y densidades de población, mejorando la fiabilidad de la detección.

Fig 3. YOLO11 detecta peatones en un paso de cebra, aumentando la seguridad vial al mejorar el reconocimiento de peatones en tiempo real.
Por ejemplo, los entornos de ciudades inteligentes pueden integrar la detección de peatones en los sistemas de gestión de pasos de peatones, garantizando que los semáforos permanezcan en rojo cuando todavía hay peatones cruzando.
Además, los centros de transporte público, como paradas de autobús y estaciones de metro, pueden utilizar la detección de peatones para analizar el movimiento de las multitudes y optimizar los horarios de trenes y autobuses. Esto garantiza un flujo eficiente de pasajeros y reduce los tiempos de espera durante las horas punta.
Link to this sectionDetección de vehículos parados#
Los vehículos parados o averiados pueden interrumpir el flujo del tráfico y crear situaciones peligrosas para otros conductores. Detectar estos vehículos rápidamente es crucial para evitar congestiones y minimizar el riesgo de accidentes.
YOLO11 puede ser entrenado para reconocer vehículos parados en autopistas, puentes y túneles. Analizando las imágenes en tiempo real de las cámaras de carretera, YOLO11 puede detectar vehículos estacionarios que bloquean el tráfico.
Por ejemplo, los centros de control de autopistas pueden utilizar sistemas de vigilancia basados en YOLO11 para identificar vehículos parados y enviar asistencia en carretera más rápidamente. Este enfoque proactivo puede ayudar a evitar accidentes secundarios y garantizar que el tráfico siga fluyendo sin problemas.
Link to this sectionVentajas de utilizar YOLO11 en la seguridad vial#
La integración de YOLO11 en los sistemas de seguridad vial ofrece varias ventajas:
- Vigilancia mejorada: La detección en tiempo real de peligros en la carretera, vehículos a exceso de velocidad y peatones mejora la gestión del tráfico.
- Mayor precisión: Las capacidades de detección de objetos de YOLO11 reducen los falsos positivos y garantizan una vigilancia fiable.
- Tiempos de respuesta más rápidos: Los sistemas automatizados pueden detectar problemas de seguridad vial inmediatamente, lo que permite una intervención más rápida.
- Ahorro de costes: Reducir los accidentes y optimizar el flujo del tráfico disminuye los costes de mantenimiento de las carreteras y de respuesta ante emergencias.
- Escalabilidad: YOLO11 puede desplegarse en diferentes entornos, desde calles urbanas hasta autopistas, apoyando diversas iniciativas de seguridad.
Link to this sectionEl futuro de la seguridad vial con la visión artificial#
Aunque YOLO11 ofrece una potente detección en tiempo real para la seguridad vial, los futuros avances en visión artificial e IA podrían llevar la seguridad vial aún más lejos.
Un posible avance es la gestión predictiva del tráfico, en la que los modelos de IA analizan grandes cantidades de datos procedentes de sensores de carretera, cámaras y condiciones meteorológicas para prever posibles congestiones o zonas propensas a accidentes.
Esto permitiría a las autoridades tomar medidas proactivas, como ajustar los límites de velocidad de forma dinámica en función de las condiciones de la carretera o desviar el tráfico antes de que se produzcan cuellos de botella.
Otra dirección prometedora son los sistemas autónomos de control del tráfico. Al integrar los sistemas de visión artificial con la infraestructura de las ciudades inteligentes, los semáforos podrían ajustarse en tiempo real para dar prioridad a los vehículos de emergencia, reducir los retrasos en las intersecciones y garantizar un flujo más fluido de vehículos y peatones.
Con las mejoras continuas en la vigilancia vial impulsada por IA, la visión artificial está llamada a desempeñar un papel aún mayor en la configuración del futuro de la seguridad del transporte.
Link to this sectionConclusiones clave#
La seguridad vial sigue siendo un reto global urgente, pero los avances en IA y visión artificial ofrecen nuevas oportunidades de mejora. Al aprovechar YOLO11 para la detección de baches, la estimación de la velocidad, la vigilancia de peatones y la detección de vehículos parados, las autoridades de transporte y los urbanistas pueden crear redes viarias más seguras y eficientes.
Ya sea para optimizar el flujo del tráfico, evitar accidentes o mejorar el mantenimiento de las carreteras, YOLO11 demuestra el potencial de la visión artificial para transformar la seguridad del transporte. Descubre cómo puede contribuir YOLO11 a soluciones de seguridad vial más inteligentes y sostenibles.
Únete a nuestra comunidad y echa un vistazo a nuestro repositorio de GitHub para aprender sobre IA. Explora diversas aplicaciones de la visión artificial en la fabricación y de la IA en la conducción autónoma en nuestras páginas de soluciones. ¡Consulta las opciones de licencia disponibles para empezar!






