Google Gemini Roboticsモデルがよりスマートなロボットを駆動している
Google Gemini Roboticsがマルチモーダルインテリジェンスを備えたAIロボットをどのように強化し、適応性、器用さ、およびシームレスな人間との対話を向上させているかを探求します。
何十年もの間、ロボットは未来の象徴であり、研究室やSF映画、最先端の産業プロトタイプ展示会などに登場してきました。現在、最近の人工知能 (AI)の進歩のおかげで、これらのプロトタイプは制御された環境を越えて実世界でのアプリケーションへと移行しています。
具体的には、GoogleはGemini Roboticsを通じて、よりスマートなロボットを構築するために必要な技術へと一歩近づいています。2025年3月12日に発表されたGemini Roboticsモデルとその関連モデルであるGemini Robotics-ER (Embodied Reasoning) は、Google DeepMindによる最新のイノベーションです。
これらは、テキスト、画像、音声、ビデオなど様々な種類のデータを処理・生成し、より多目的で自然な対話を可能にするマルチモーダル大規模言語モデル (LLM) であるGemini 2.0に基づいて構築されています。これらのモデルは、Gemini 2.0のマルチモーダル能力を物理世界にもたらし、より器用で対話的、かつ知的なロボットを実現します。
例えば、決まった指示に従う従来のロボットとは異なり、Gemini Roboticsモデルが統合されたロボットは、視覚と言語を処理することができます。これにより、リアルタイムで判断を下し、変化する環境に適応することが可能になります。
本記事では、Gemini RoboticsとGemini Robotics-ERについて、それらのモデルがどのように機能するのか、そしてその主な機能とアプリケーションについて解説します。それでは始めましょう!

図1 Gemini Roboticsは、ロボットが複数のタスクを効率的に実行できるよう支援します。
Link to this sectionGoogle Gemini Roboticsの紹介#
GoogleのGemini Roboticsは、ロボットが物理世界を認識し、推論し、対話できるように設計された高度なAIモデルです。視覚・言語・行動(VLA)モデルとして、ロボットが指示を処理し、環境を解釈し、高い精度で複雑なタスクを実行することを可能にします。
一方、Gemini Robotics-ERモデルは、物体がどのように配置され、どのように動き、どのように相互作用するかという空間関係を理解するロボットの能力を向上させます。これにより、ロボットは動作を予測し、それに応じて自身の動きを調整できるようになります。
例えば、ロボットがヘッドフォンの周りにワイヤーを巻き付けるタスクを考えてみましょう。Gemini Robotics-ERは、シーンを理解し、ワイヤーの形状と柔軟性を認識し、ヘッドフォンの構造を特定し、動いたときにワイヤーがどのように曲がるかを予測するのに役立ちます。次に、Gemini Roboticsはこの理解を実際の行動に変換し、両手を協調させてワイヤーを滑らかに操作し、絡まないようにグリップを調整し、しっかりと巻き付けられるようにします。
知覚と行動を組み合わせることで、Gemini RoboticsとGemini Robotics-ERは、動的な環境下でロボットが器用なタスクを効率的に実行できるようにするインテリジェントなシステムを構築します。
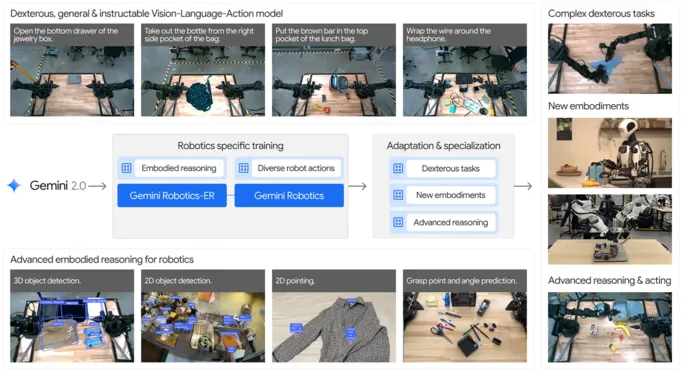
図2 Gemini Roboticsモデルファミリーの概要。
Link to this sectionロボティクスにおけるAI:Gemini Roboticsの仕組みを探る#
次に、各モデルを詳しく見ていき、Gemini RoboticsとGemini Robotics-ERがどのように協力して柔軟性と迅速な行動のバランスを取っているのかを理解しましょう。
一方において、Gemini Robotics-ERは、ゼロショットコード生成とフューショット・インコンテキスト学習(ICL)という2つの主要なメカニズムを活用しています。ゼロショットコード生成により、モデルは追加のトレーニングを必要とせず、タスクの指示、画像、リアルタイムデータに基づいてロボットを制御するためのコードを作成できます。
同様に、フューショット学習を使用することで、モデルはわずかな例から学習して新しいタスクに適応し、広範なトレーニングの必要性を減らします。これらの手法を組み合わせることで、ロボットは複雑なタスクを迅速に実行し、最小限の労力で新しい課題に適応できるようになります。
対照的に、Gemini Roboticsは速度と効率を重視して構築されています。これは、クラウドベースのバックボーンとオンボードのアクションデコーダーからなるハイブリッドシステムを使用しています。クラウドベースのバックボーンは情報を迅速に処理し、クエリからレスポンスまでのレイテンシは160ミリ秒未満です。
そして、オンボードのデコーダーが、このデータをリアルタイムの行動に変換するのに役立ちます。この統合システムは、全体で約250ミリ秒のレスポンスタイムを実現し、毎秒50アクションという制御速度を誇ります。
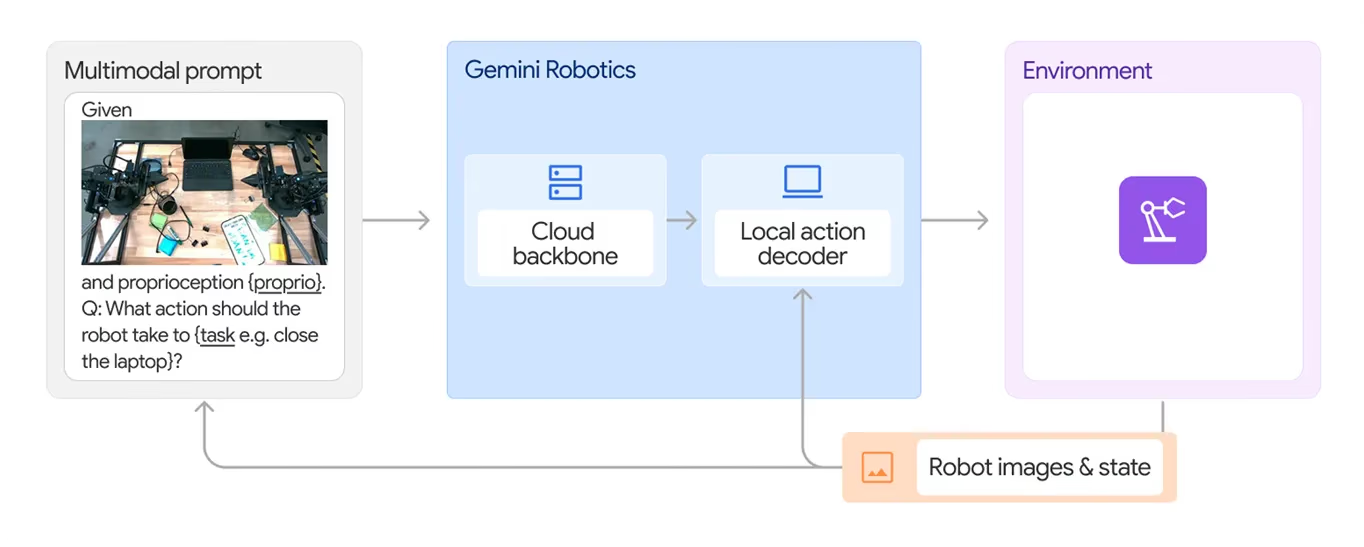
図3 Gemini Roboticsがリアルタイムのロボット制御をどのようにサポートするかについての理解。
Link to this sectionGemini Roboticsの主な能力#
Gemini Roboticsの主な機能の概要は以下の通りです。
-
汎用性: 照明、背景、物体の変化に適応しながらも精度を維持できます。また、言い換えられたコマンドや多言語のコマンドを理解し、異なる条件に合わせて動きを調整することも可能です。
-
相互作用性: このモデルは、幅広い自然言語コマンドを処理し、直感的に応答できます。また、環境のリアルタイムな変化に基づいて行動を調整するため、人間とロボットのコラボレーションに最適です。
-
器用さ: このモデルを搭載したロボットは、折り紙を折ったり、繊細な物体を扱ったりするなど、複雑で精密なタスクを実行できます。ステップバイステップのプロセスであれ、迅速なアクションであれ、モデルはそれらを効率的に実行するのに役立ちます。
-
多様なロボットプラットフォームへの対応: 2本腕システムやヒューマノイドロボットなど、様々なロボットプラットフォームで動作し、微調整はほとんど必要ありません。高いパフォーマンスを維持しながら、新しいタスクに迅速に適応します。
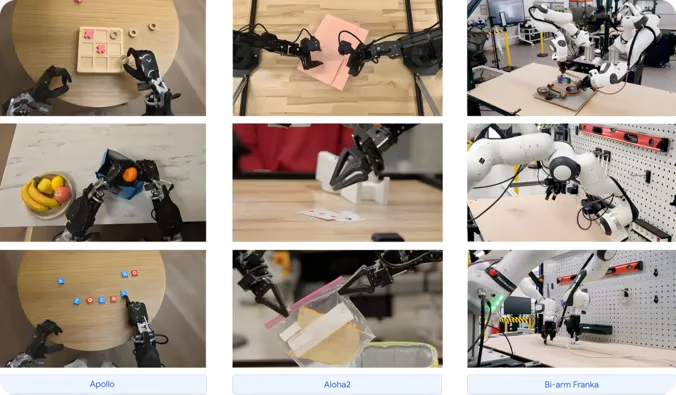
図4 Google Gemini Roboticsは様々なロボットプラットフォームで動作します。
Link to this sectionGemini Robotics-ERの主な能力#
ロボットが世界を理解し、相互作用するために役立つGemini Robotics-ERの主な機能をいくつか紹介します:
-
物体検出と追跡: 2D空間と3D空間の両方で物体を特定および追跡するために使用できます。自然言語クエリを使用することで、ロボットが種類、場所、機能に基づいて物体を見つけ、その位置を予測するのを支援します。
-
ポインティング: この機能により、モデルは正確な座標を使用して画像内の特定の物体や部分を特定できます。ロボットが物体全体、物体の一部、あるいは空いているスペースを見つけるのを助けるために使用できます。
-
把持予測: Gemini Robotics-ERは、物体の形状や機能に基づいて、物体を掴む最適な方法を決定するために使用できます。バナナであれカップの取っ手であれ、どこを掴むべきかを予測し、ロボットが慎重にアイテムを扱えるようにします。
-
軌道推論: このモデルは、一連の行動を予測することで移動経路を計画するために使用できます。例えば、ロボットの手をツールに誘導したり、特定のタスクのウェイポイントを定義したりして、ロボットがタスクを効率的に完了できるよう支援します。
-
多視点対応: この機能は、物体が異なる角度からどのように見えるかを比較することで、3D構造を理解するのに役立ちます。空間推論を強化するために使用でき、動的な環境下でロボットが物体とより適切に相互作用できるようにします。
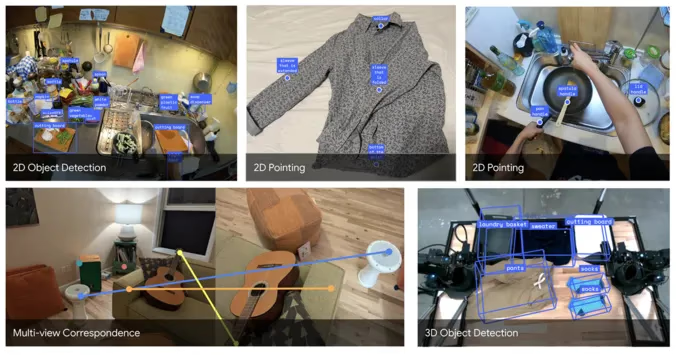
図5 Gemini Robotics-ERは様々なタスクを処理できます。
Link to this sectionGoogle Gemini Roboticsモデルのアプリケーション#
Gemini RoboticsとGemini Robotics-ERの主な能力について説明しましたので、次は様々な業界における実世界のアプリケーションを見ていきましょう。
Link to this sectionGoogle Gemini Roboticsは製造業で使用可能#
製造業において、精度と速度は重要ですが、適応性こそが物事を円滑に進める鍵です。例えば、Gemini搭載の産業用ロボットは、適切な部品を特定し、それらを正しく配置し、柔軟なゴムバンドを正確な力で扱うことで、プーリーシステムを組み立てることができます。
ゴムバンドを伸ばし、プーリーに巻き付け、破損や位置ずれを起こさずに固定できます。セットアップが変更されたり、タスクが異なったりする場合でも、ロボットは広範な再プログラミングなしで適応できます。このスマートな自動化は、エラーを削減し、効率を向上させ、製造プロセスを円滑に維持します。

図6 2本腕の産業用ロボットが正確にゴムバンドをプーリーシステムに取り付けています。
Link to this sectionGemini Roboticsが実現するスマートホーム#
忙しいスケジュールでは、家事をこなすのは大変なことです。スマートロボットは、掃除、食料品の仕分け、食事の準備の補助といったタスクを代行し、日常生活をより快適にすることができます。
例えば、ロボットがランチバッグを詰める場合、果物や缶のような壊れやすいアイテムを保護するためにグリップを調整しながら、慎重に食品を選んで中に入れることができます。配置が変わったとしても、ロボットは自律的に適応し、最小限の監督で日常の家事を軽減できます。
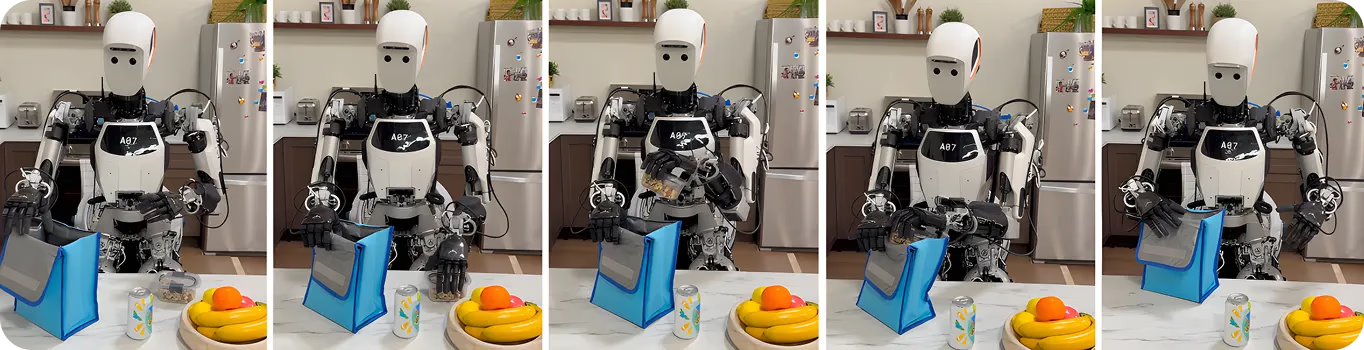
図7 ヒューマノイドロボットが慎重にランチバッグを詰めています。
Link to this sectionGemini Roboticsを活用するメリットとデメリット#
Gemini Roboticsは、精密な製造からスマートホームの支援まで、ロボットにできることを拡大しています。様々なアプリケーションでGemini Roboticsを使用する主な利点を挙げます:
- 最小限のトレーニング要件: 従来のロボットとは異なり、Gemini Roboticsで駆動するロボットはわずかなデモンストレーションから学習できるため、トレーニングコストを削減し、デプロイを容易にします。
- 安全性の強化: 危険な環境下では、Gemini Roboticsが統合されたロボットが危険なタスクを実行できるため、人間の作業者の怪我のリスクを低減できます。
- カスタマイズ可能な機能: Gemini Roboticsの柔軟性は、様々な業界や個々のビジネスの特定のニーズに合わせて調整できることを意味し、専門的なアプリケーションや独自のソリューションを可能にします。
Gemini Roboticsにはいくつかの利点がありますが、以下の制限に対処することも重要です:
- 空間関係における課題: これらのモデルは、長いビデオシーケンス全体で空間関係を追跡するのが困難な場合があり、時間の経過とともに物体を追跡・理解する能力に影響を与えます。
- 数値精度の欠如: ポイントやバウンディングボックスなど、モデルの予測は、繊細なロボットタスクなど、細かい制御が必要なタスクには十分な精度がない場合があります。
- 複雑なタスク: Gemini Roboticsは、マルチステップの推論と精密な動作を必要とする複雑なタスク、特に新しく馴染みのない状況でのタスクの処理に苦労する可能性があります。
Link to this sectionロボティクスにおけるAIの未来#
AIが進化を続けるにつれ、Gemini RoboticsやGemini Robotics-ERのようなモデルがロボティクスの未来を推進しています。今後の改善は、マルチステップ推論の強化に重点が置かれる可能性が高く、ロボットがタスクを論理的なステップに分割して、より高い精度を実現できるようになるでしょう。
Google DeepMindが取り組む予定のもう一つの主要な開発領域は、シミュレーションベースのトレーニングです。実世界へのデプロイの前に仮想環境で学習することで、ロボットは意思決定と動きを洗練させ、実用的なアプリケーションでのエラーを最小限に抑えることができます。
これらの技術が進化するにつれて、ロボットがより自律的かつ適応的になり、日常生活の中で人間とシームレスに協力できる未来が切り開かれるでしょう。
Link to this section重要なポイント#
Gemini Roboticsは、デジタルインテリジェンスと現実世界の物理的タスクを繋ぐ、AI駆動型自動化における大きな進歩です。視覚、言語、および行動ベースの学習を組み合わせることで、これらのロボットは複雑なタスクを精度と適応性を持って処理できます。
ロボットがよりスマートになり続けるにつれ、日常生活においてより大きな役割を果たし、人間と機械の協力の仕方を変化させるでしょう。この進歩は、AI主導の自動化が産業と日常タスクの両方を強化する、より知的でコネクテッドな世界へと私たちを近づけています。
成長を続ける私たちのコミュニティに参加しませんか!GitHubリポジトリを訪問して、AIをさらに深く探求してください。独自のコンピュータビジョンプロジェクトを開始したいですか?私たちのライセンスオプションをご覧ください。製造業におけるAIや自動車業界におけるビジョンAIの詳細については、ソリューションページをご確認ください!






