Ultralytics YOLO11を用いたロボティクスへのコンピュータビジョンの統合
Ultralytics YOLO11のようなコンピュータビジョンモデルが、どのようにロボットをよりスマートにし、ロボティクスの未来を形作っているかを詳しく見ていきましょう。

ロボットは、1950年代に発明された最初の産業用ロボットであるUnimateから大きく進化しました。当初は事前にプログラムされたルールベースの機械でしたが、現在では複雑なタスクを実行し、現実世界とシームレスに対話できるインテリジェントなシステムへと進化しています。
今日、ロボットは製造業やヘルスケアから農業に至るまで、さまざまな産業で多目的なプロセス自動化のために活用されています。ロボティクスの進化における重要な要素は、AIと、機械が視覚情報を理解・解釈することを支援するAIの一分野であるコンピュータビジョンです。
例えば、Ultralytics YOLO11のようなコンピュータビジョンモデルは、ロボットシステムの知能を向上させています。これらのシステムに統合されることで、ビジョンAIはロボットが物体を認識し、環境を移動し、リアルタイムで判断を下すことを可能にします。
本記事では、YOLO11がどのように高度なコンピュータビジョン機能でロボットを強化できるか、そしてさまざまな産業におけるその活用事例を探ります。
Link to this sectionロボティクスにおけるAIとコンピュータビジョンの概要#
ロボットの基本機能は、周囲をどれだけ正確に理解できるかに依存します。この認識能力が、物理的なハードウェアとスマートな意思決定を結びつけます。それがなければ、ロボットは固定された指示に従うことしかできず、変化する環境への適応や複雑なタスクの処理に苦労します。人間が視覚に頼って移動するのと同様に、ロボットはコンピュータビジョンを利用して環境を解釈し、状況を理解し、適切な行動をとります。
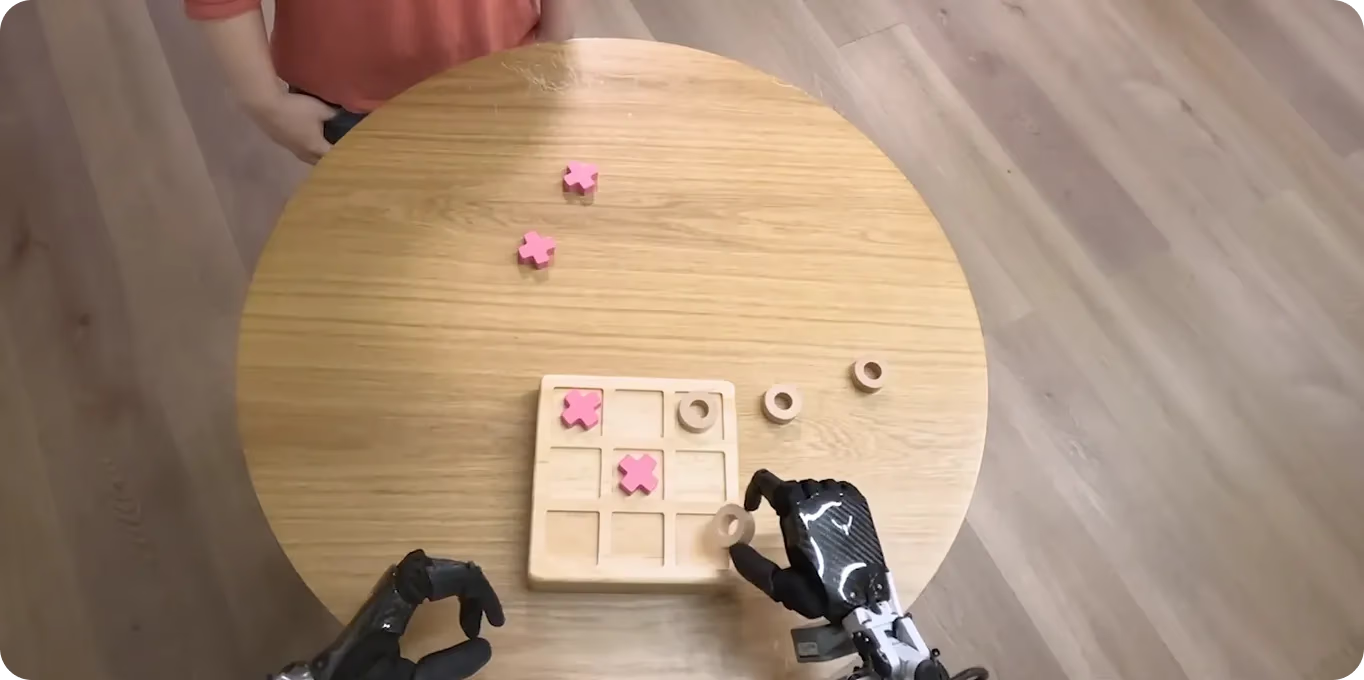
図1. コンピュータビジョンを使って盤面を解釈し、戦略的な一手を選ぶ三目並べを行うロボット。
実際、コンピュータビジョンはほとんどのロボットタスクの基本です。ロボットが移動する際に物体を検出し、障害物を回避するのに役立ちます。しかし、そのためには世界を見るだけでは不十分であり、ロボットは迅速に反応できなければなりません。現実世界の状況では、わずかな遅延が致命的なエラーにつながる可能性があります。Ultralytics YOLO11のようなモデルは、複雑で未知の状況下であっても、ロボットがリアルタイムで洞察を得て即座に応答することを可能にします。
Link to this sectionUltralytics YOLO11の紹介#
YOLO11をロボットシステムに統合する方法を掘り下げる前に、まずはYOLO11の主要な機能を探ってみましょう。
Ultralytics YOLOモデルは、高速でリアルタイムな洞察を実現するさまざまなコンピュータビジョンタスクをサポートしています。特にUltralytics YOLO11は、より高速なパフォーマンス、低い計算コスト、そして向上した精度を提供します。例えば、画像や動画内の物体を高精度で検出するために使用でき、ロボティクス、ヘルスケア、製造業などの分野での応用に最適です。
YOLO11がロボティクスにとって優れた選択肢となる、インパクトのある機能をいくつか紹介します。
- デプロイの容易さ: 簡単にデプロイでき、幅広いソフトウェアおよびハードウェアプラットフォーム間でシームレスに統合できます。
- 適応性: YOLO11は異なる環境やハードウェア構成で適切に動作し、動的な条件下でも一貫したパフォーマンスを発揮します。
- ユーザーフレンドリー: YOLO11の分かりやすいドキュメントとインターフェースは学習曲線を低減し、ロボットシステムへの統合をシンプルにします。
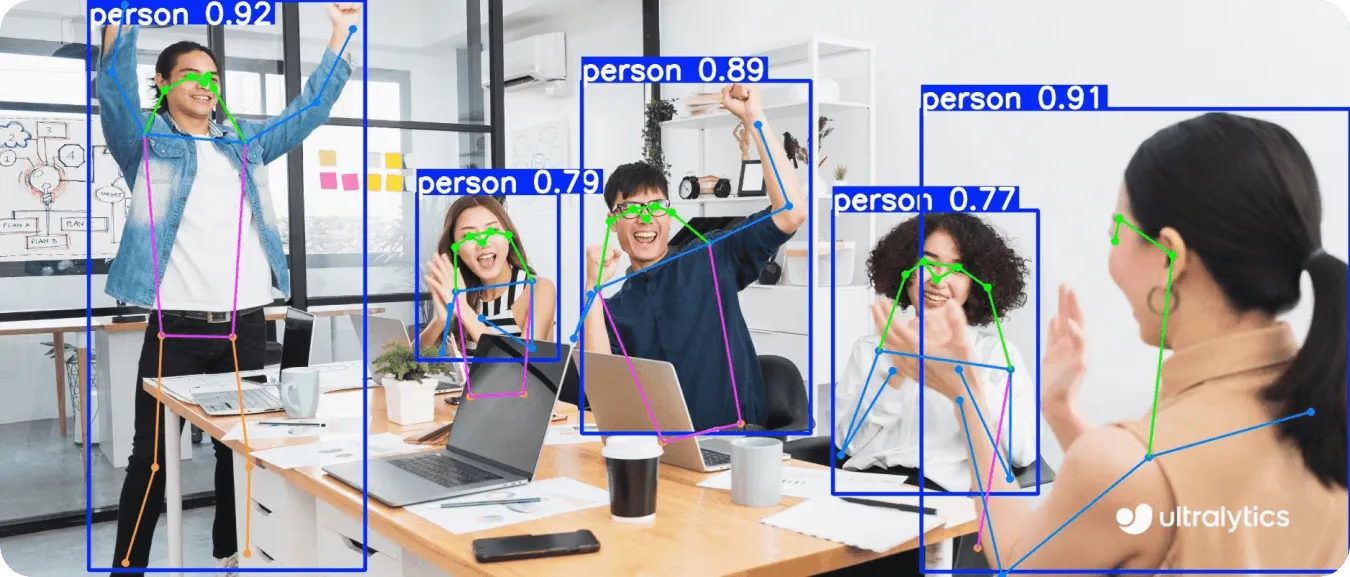
図2. YOLO11を使用して画像内の人物のポーズを解析する例。
Link to this sectionYOLO11によって実現されるコンピュータビジョンのタスクの探求#
YOLO11がサポートするコンピュータビジョンのタスクを詳しく見ていきましょう。
- 物体検出: YOLO11のリアルタイム物体検出機能により、ロボットは視界内の物体を瞬時に特定し、位置を把握できます。これはロボットが障害物を回避し、動的な経路計画を実行し、屋内・屋外両方の環境で自動ナビゲーションを実現するのに役立ちます。
- インスタンスセグメンテーション: 個々の物体の正確な境界と形状を識別することで、YOLO11はロボットが正確なピックアンドプレース操作や複雑な組み立てタスクを実行できるようにします。
- ポーズ推定: YOLO11のポーズ推定サポートにより、ロボットは人間の体の動きやジェスチャーを認識・解釈できます。これは、協働ロボット(コボット)が人間と安全に並んで働くために不可欠です。
- 物体追跡: YOLO11は、動く物体を長時間追跡することを可能にし、周囲をリアルタイムで監視する必要がある自律型ロボット関連のアプリケーションに最適です。
- 画像分類: YOLO11は画像内の物体を分類できるため、ロボットはアイテムを分類したり、異常を検出したり、ヘルスケア現場での医療用品の識別のように、物体のタイプに基づいて意思決定を行うことができます。
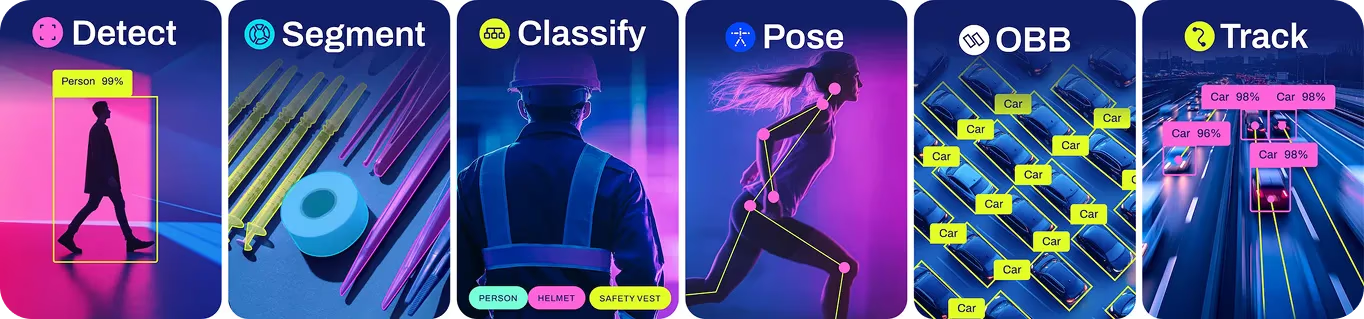
図3. YOLO11がサポートするコンピュータビジョンのタスク。
Link to this sectionロボティクスアプリケーションにおけるAI: YOLO11による強化#
インテリジェントな学習から産業オートメーションまで、YOLO11のようなモデルはロボットができることを再定義するのに役立ちます。ロボティクスへの統合は、コンピュータビジョンモデルがいかに自動化の進歩を推進しているかを示しています。YOLO11が大きな影響を与える可能性のある主要な領域をいくつか探ってみましょう。
Link to this sectionコンピュータビジョンを使用したロボットの学習#
コンピュータビジョンは人型ロボットで広く使用されており、環境を観察することで学習することを可能にしています。YOLO11のようなモデルは、高度な物体検出とポーズ推定を提供することでこのプロセスを強化し、ロボットが人間の行動や振る舞いを正確に解釈するのを支援します。
リアルタイムで微細な動きや対話を分析することで、ロボットは複雑な人間によるタスクを複製するようにトレーニングされます。これにより、事前のプログラムされたルーチンを超えて、リモコンやドライバーの使用といったタスクを、単に人間を見るだけで学習できるようになります。
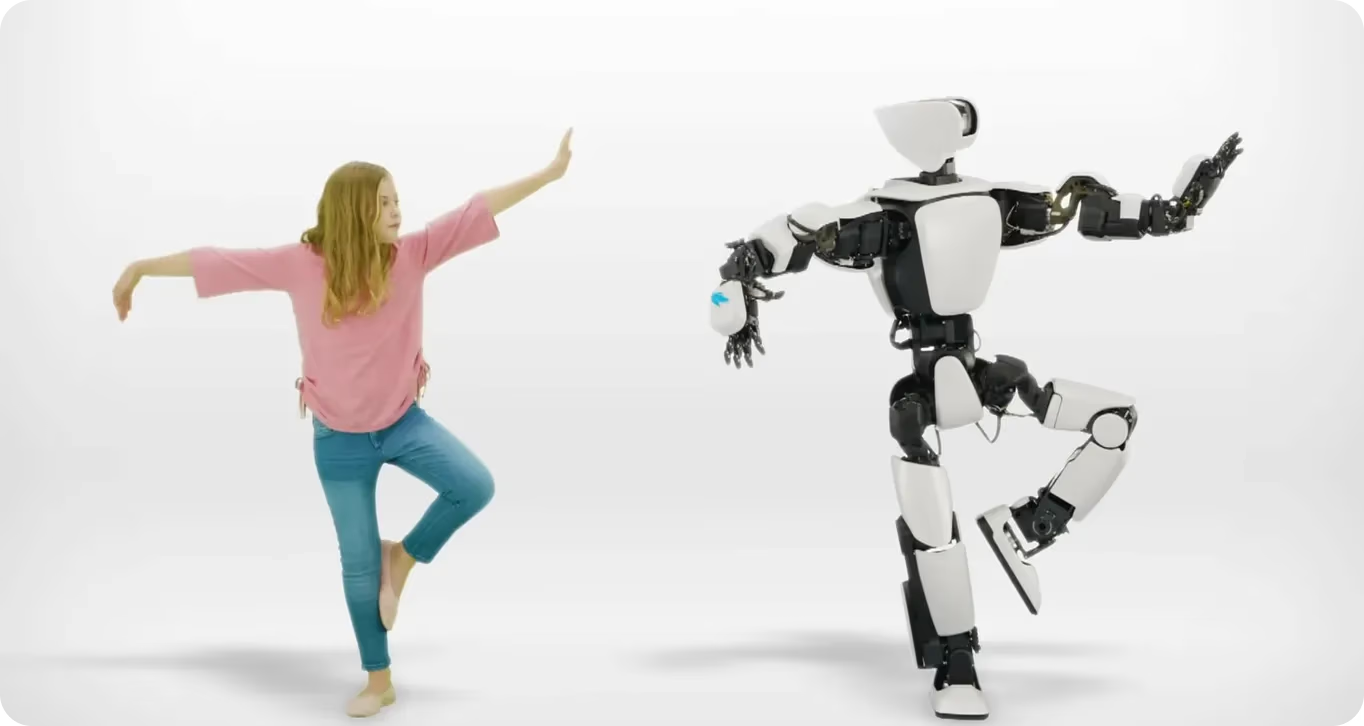
図4. 人間の行動を模倣するロボット。
この種の学習は、さまざまな産業で役立ちます。例えば農業において、ロボットは人間の作業者が植え付け、収穫、作物管理といったタスクを学ぶのを見ることができます。人間がこれらのタスクをどのように行うかをコピーすることで、ロボットは状況ごとにプログラムされる必要なく、さまざまな農業環境に適応できます。
Link to this sectionヘルスケアロボティクスに関連するアプリケーション#
同様に、ヘルスケアにおいてもコンピュータビジョンはますます重要になっています。例えば、YOLO11を医療機器に使用することで、外科医の複雑な手順を支援できます。物体検出やインスタンスセグメンテーションなどの機能により、YOLO11はロボットが体内の構造を特定し、手術器具を管理し、正確な動きを行うことを支援します。
これはSFの話のように聞こえるかもしれませんが、最近の研究では、外科手術におけるコンピュータビジョンの実用的な応用が実証されています。胆嚢摘出術のための自律型ロボット解剖に関する興味深い研究において、研究者は組織セグメンテーションのためのYOLO11(画像内の異なる組織を分類・分離する)と、外科手術器具のキーポイント検出(ツール上の特定のランドマークを識別する)を統合しました。
システムは、手術中に組織が変形(形状変化)しても異なる組織タイプを正確に区別し、これらの変化に動的に調整することができました。これにより、ロボット器具が正確な解剖(手術での切断)経路に従うことが可能になりました。
Link to this sectionスマート製造と産業オートメーション#
物体をピックアンドプレースできるロボットは、製造業務の自動化やサプライチェーンの最適化において重要な役割を果たしています。その速度と精度により、アイテムの識別や選別など、人間の介入を最小限に抑えたタスクを実行できます。
YOLO11の正確なインスタンスセグメンテーションにより、ロボットアームはコンベアベルト上を移動する物体を検出・セグメント化し、それらを正確に拾い上げ、タイプやサイズに基づいて指定された場所に配置するようにトレーニングできます。
例えば、大手の自動車メーカーはビジョンベースのロボットを使用して車の部品を組み立て、組み立てラインの速度と精度を向上させています。YOLO11のようなコンピュータビジョンモデルにより、これらのロボットは人間の作業者と並んで働くことができ、動的な生産現場での自動化システムのシームレスな統合を実現します。この進歩は、生産時間の短縮、エラーの減少、そしてより高品質な製品につながります。
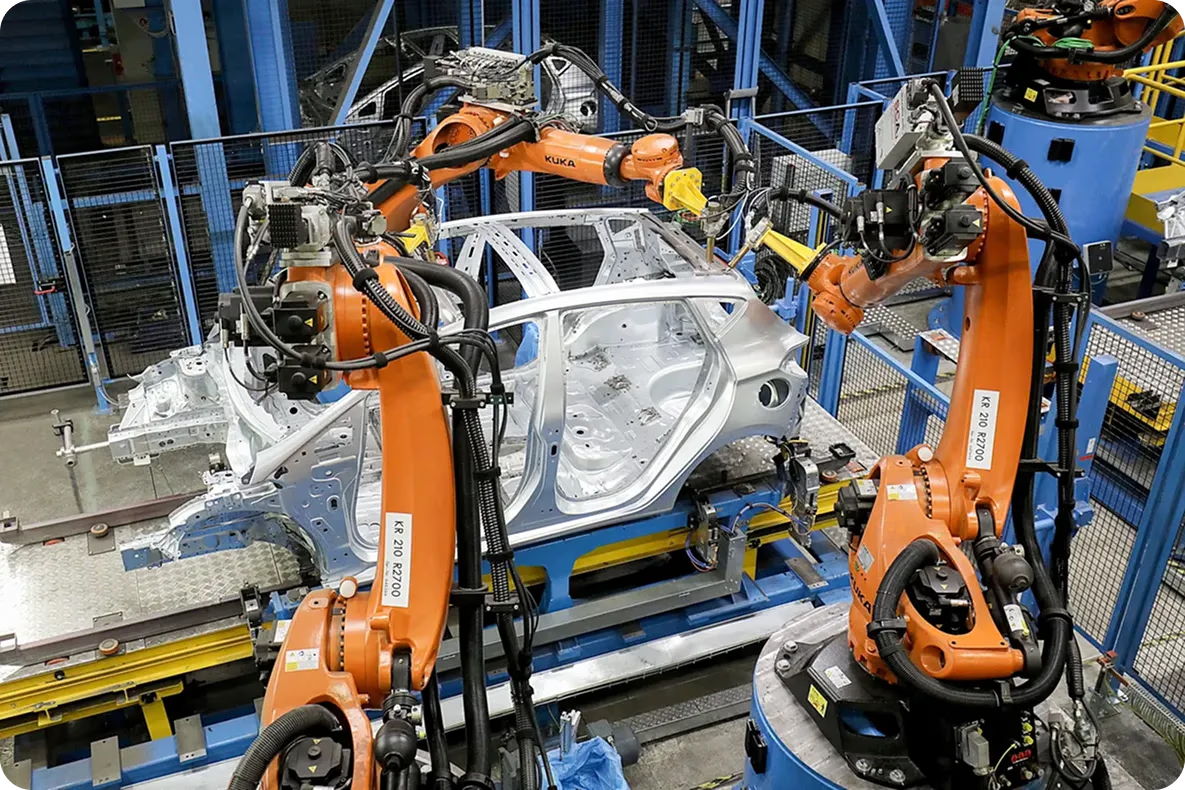
図5. 車を組み立てるビジョンベースのロボットアーム。
Link to this sectionロボティクスにUltralytics YOLO11を統合するメリット#
YOLO11は、自律型ロボットシステムへのシームレスな統合に最適となる、いくつかの主要な利点を提供します。主な利点を以下に挙げます。
- 低い推論レイテンシ: YOLO11は、動的な環境下においても、低レイテンシで精度の高い予測を提供できます。
- 軽量モデル: パフォーマンスの最適化を目指して設計されたYOLO11の軽量モデルにより、処理能力が限られた小さなロボットでも、効率を犠牲にすることなく高度な視覚機能を持たせることが可能です。
- エネルギー効率: YOLO11はエネルギー効率に優れるよう設計されており、高いパフォーマンスを維持しながら消費電力を抑える必要があるバッテリー駆動のロボットに最適です。
Link to this sectionロボティクスにおけるビジョンAIの制限#
コンピュータビジョンモデルはロボットの視覚のために強力なツールを提供しますが、現実世界のロボットシステムに統合する際には考慮すべき制限もあります。それらの制限には以下のようなものがあります。
- 高コストなデータ収集: ロボット固有のタスクに対して効果的なモデルをトレーニングするには、大規模で多様、かつ適切にラベル付けされたデータセットが必要となることが多く、これらの取得は高コストです。
- 環境の多様性: ロボットは予測不可能な環境で動作するため、照明条件や乱雑な背景といった要因がビジョンモデルのパフォーマンスに影響を与える可能性があります。
- キャリブレーションとアライメントの問題: ビジョンシステムが適切にキャリブレーションされ、ロボットの他のセンサーとアライメントが取れていることを確認することは、正確なパフォーマンスのために極めて重要であり、アライメントの不一致は意思決定のエラーにつながる可能性があります。
Link to this sectionロボティクスとAIの進歩の未来#
コンピュータビジョンシステムは、今日のロボットのためのツールであるだけでなく、ロボットが自律的に動作できる未来に向けた構成要素です。リアルタイムの検出能力と多タスクのサポートにより、次世代ロボティクスに最適です。
実際、現在の市場トレンドは、ロボティクスにおいてコンピュータビジョンがますます不可欠になっていることを示しています。業界レポートは、コンピュータビジョンが世界のAIロボット市場で2番目に広く使用されている技術であることを強調しています。
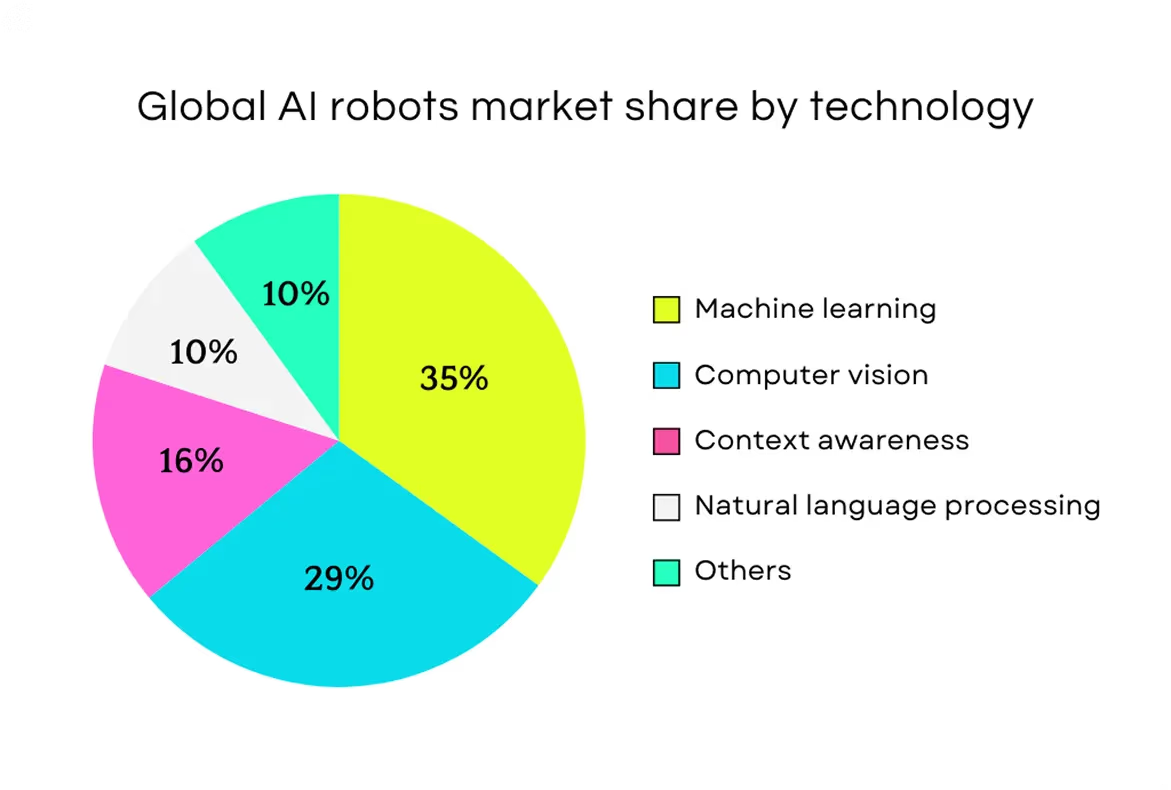
図6. 技術別のグローバルAIロボット市場シェア。
Link to this section重要なポイント#
リアルタイムの視覚データを処理する能力により、YOLO11はロボットが周囲をより正確に検出し、識別し、対話することを支援します。これは、ロボットが人間と協力できる製造業や、複雑な手術を支援できるヘルスケアのような分野で大きな違いを生み出します。
ロボティクスが進化し続ける中で、そのようなシステムへのコンピュータビジョンの統合は、ロボットがより幅広いタスクを効率的に処理できるようにするために不可欠となるでしょう。AIとコンピュータビジョンがよりスマートで適応性の高いマシンを推進することで、ロボティクスの未来は有望視されています。
私たちのコミュニティに参加し、GitHubリポジトリをチェックして、AIの最新の発展についてさらに詳しく学びましょう。ソリューションページで、ヘルスケアにおけるAIや農業におけるコンピュータビジョンのさまざまなアプリケーションを探索してください。独自のコンピュータビジョンソリューションを構築するには、ライセンスプランをご確認ください。






