夜間の交通映像検出:精度が重要である理由
視界不良からグレア(眩しさ)まで、夜間の交通映像検出の精度を低下させる要因と、コンピュータビジョンがどのように安全性と交通流を改善するかを学びます。

道路は暗闇の中では見え方が異なります。それはドライバーだけでなく、安全を維持するシステムにとっても同様です。視界不良、ヘッドライトのまぶしさ、高速で移動する反射光などが、夜間の車両検知をより困難にしています。
手動による監視や動き検知カメラといった従来の方法は、主に人間の判断や単純な動きの合図に依存しています。これらは、低照度環境や複雑な交通状況下では信頼性に欠ける場合があります。これらの手法は車両や歩行者の識別を誤る可能性があり、誤検知や見落としにつながります。

図1. 夜間の照明が不十分な道路の例 (出典)
人工知能(AI)、ディープラーニング、およびコンピュータビジョンは、車両検知と認識を自動化することでそのギャップを埋めることができます。特にコンピュータビジョンは、機械が視覚データを「見て」解釈できるようにするAIの一分野です。夜間の交通ビデオ検知に関しては、ビジョンAIモデルは明るさや動きの先を行き、精度を向上させる複雑なパターンを認識するように学習できます。
例えば、Ultralytics YOLO26やUltralytics YOLO11のようなコンピュータビジョンモデルは、その速度と精度で知られています。これらはビデオや画像データをリアルタイムで処理し、フレーム内の複数のオブジェクトを検知・分類し、シーケンス全体で追跡することが可能です。
これらの機能は、オブジェクト検知やインスタンスセグメンテーションといったさまざまなビジョンタスクを通じて実現されており、ヘッドライトや影、重なり合う車両によって検知が困難な場合でも有効です。これにより、モデルはオブジェクトの識別、分類、区別を行うことができます。
本記事では、夜間の交通監視における課題を探り、コンピュータビジョンがそれらにどのように対処するか、そしてビジョンAIが現実世界の交通監視システムでどのように活用されているかを見ていきます。それでは始めましょう!
Link to this section夜間検知における課題#
コンピュータビジョンが夜間の交通検知の課題をどのように解決するかを探る前に、なぜ暗闇の後に車両を見つけることがこれほど難しいのかを見てみましょう。考慮すべきいくつかの要因は以下の通りです。
-
視界不良: 限定的な照明や不十分な照度条件では、カメラが鮮明で詳細な映像を捉えることが困難です。画質が低下すると、車両が背景に溶け込んだり、誤認されたりする可能性があります。
-
気象条件: 雨、霧、もや、あるいは埃などが、ビデオ品質をさらに低下させる可能性があります。これらの条件は、検知システムが周囲の環境から車両を区別することをより難しくします。
-
ヘッドライトとテールライト: 明るい光線や反射光はカメラを圧倒する可能性があります。これにより、光の斑点を車両と見誤る「誤検知」が発生し、検知アルゴリズムを混乱させ、精度を低下させます。
-
車両の遮蔽: 交通量の多い状況では、車両が他の車両の背後に部分的、あるいは完全に隠れてしまうことがあります。遮蔽は、特に単一フレーム内で複数の道路利用者が重なる場合に、車両の追跡、カウント、分類を複雑にします。
Link to this section夜間用ベンチマークデータセットとメトリクスの必要性#
コンピュータビジョンモデルは、データセットと呼ばれる大規模な画像のコレクションを使用して学習されます。これらのデータセットは、車、トラック、歩行者、自転車などの含まれるオブジェクトに注意深くラベル付けされており、学習の基礎として機能します。モデルはこれらのラベル付けされた例を学習することで、パターンを認識できるようになり、新しいビデオ映像でもオブジェクトを識別・検知できるようになります。

図2. コンピュータビジョンを使用して交通中の車両と歩行者を検知 (出典)
学習中、モデルはデータから特徴を抽出し、それを使用して検知精度を向上させます。このプロセスは、モデルが現実世界の交通シーンにさらされた際の見落としや誤警報を減らすのに役立ちます。
しかし、夜間環境のためのデータセットやデータの収集を構築することは、はるかに困難です。ビデオ品質が悪いため、ラベル付けに時間がかかり、間違いが起こりやすくなります。また、事故や珍しい運転行動といった、まれではあるが重要なイベントを夜間の設定で捉えることは困難です。その結果、モデルが学習するための学習例が限られてしまいます。
この問題に対処するため、研究者は専門的なベンチマークデータセットを開発しました。ベンチマークデータセットは、単なる画像のコレクション以上のものです。これには、標準化されたラベル、評価プロトコル、および精度(precision)、再現率(recall)、平均適合率(mAP)などの性能メトリクスが含まれています。これらのメトリクスにより、同じ条件下で異なるアルゴリズムをテストおよび比較し、公平かつ一貫した評価を保証することが可能になります。
例えば、ExDarkベンチマークデータセットには、12のオブジェクトカテゴリ(自転車、ボート、ボトル、バス、車、猫、椅子、カップ、犬、バイク、人、テーブル)にわたる7,363枚の低照度画像が含まれています。各画像にはバウンディングボックスがアノテーションされており、このデータセットは不十分な照明下でのオブジェクト検知と分類を評価するために研究で広く使用されています。
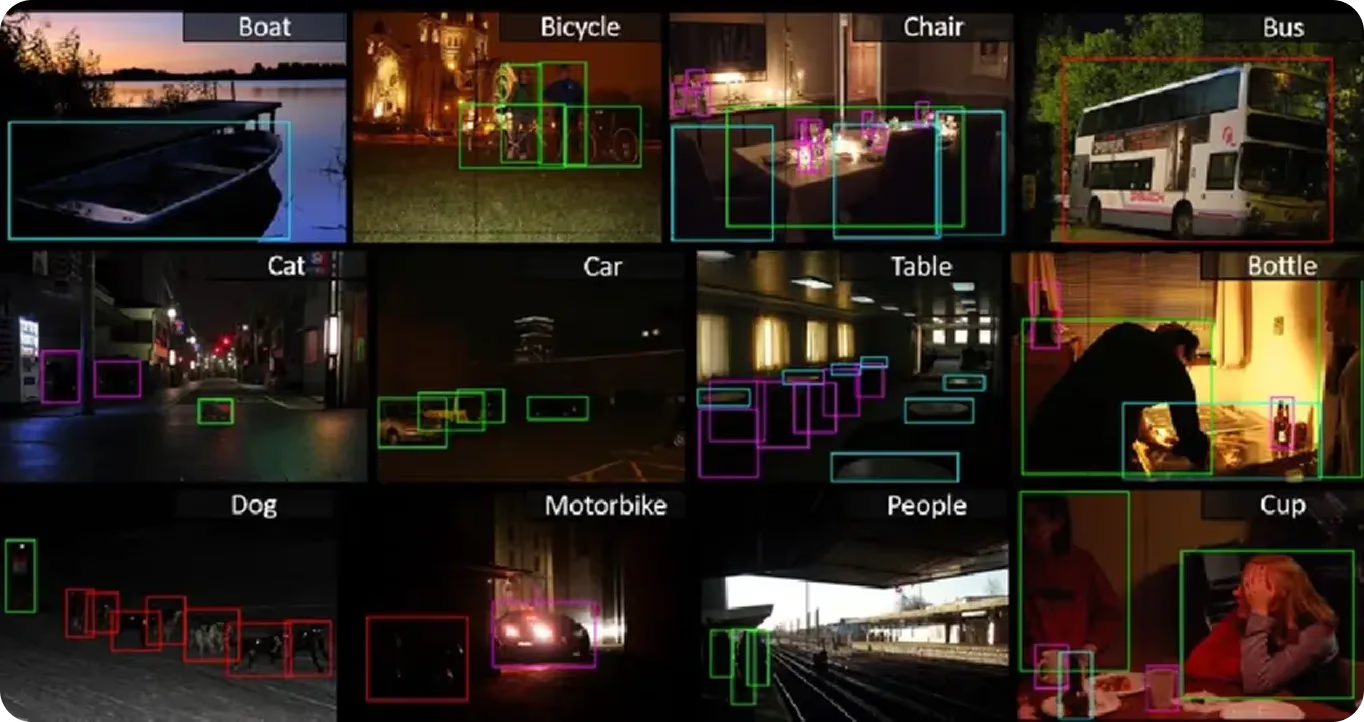
図3. ExDarkデータセットの概要 (出典)
同様に、NightOwlsベンチマークデータセットは、約279,000件の歩行者アノテーションを含む約115,000枚の夜間画像を提供しています。これは、道路の安全や高度運転支援システム(ADAS)において重要な役割を果たす歩行者検知システムを評価するための重要なリソースとなっています。
Link to this sectionコンピュータビジョンが夜間の交通ビデオ検知をどのように支援するか#
関連する課題とデータセットの必要性が理解できたところで、ビジョンベースのシステムがどのように夜間の交通ビデオを解釈できるかを詳しく見ていきましょう。
YOLO11やYOLO26のようなモデルは、オブジェクト検知、追跡、インスタンスセグメンテーションといったコンピュータビジョンのタスクをサポートしており、低照度環境下でも交通の分析を可能にします。夜間の交通を分析するためにこれらのモデルがサポートするビジョンAIタスクの概要を以下に示します:
- オブジェクト検知: このタスクは、各フレーム内の車両、歩行者、自転車、その他の道路利用者を識別し、その位置を特定するために使用されます。通常、それらの周囲にバウンディングボックスを描画します。
- オブジェクト追跡: 検知されたオブジェクトをフレーム間で追跡するのに役立ち、同じ車両や歩行者を時間経過とともに認識できるようにします。これにより、車両速度の推定や交通流の監視が可能になります。
- インスタンスセグメンテーション: オブジェクトが重なっている場合でも個々のオブジェクトを区別でき、複雑な夜間状況において精度を向上させるピクセルレベルの詳細を提供します。
- 画像分類: このタスクは、画像全体や検知されたオブジェクトを、車、バス、トラック、オートバイなどの定義済みのカテゴリに割り当てます。
- 回転バウンディングボックス(OBB)検知: オブジェクトの正確な角度と向きを捉え、夜間の交通で車両が斜めや奇妙な位置に現れる際の精度を向上させます。
Link to this section夜間監視にUltralytics YOLOモデルを使用する#
ここまで、モデルの学習、データセットの必要性、そしてYOLO11やYOLO26のようなモデルがサポートするタスクについて説明しました。これらを統合し、これらのモデルが実際にどのように夜間監視に応用されるかを説明するもう一つの概念を見てみましょう。
Ultralytics YOLOモデルは最初から事前学習済みバージョンとして利用可能であり、これは、COCOデータセットのような、多くの日常的なオブジェクトを網羅する大規模で汎用的なデータセットですでに学習済みであることを意味します。これにより、モデルはオブジェクトを検知および分類する強力な基礎能力を備えています。
しかし、これらのデータセットには低照度や夜間の例がほとんど含まれていないため、事前学習済みモデルはまぶしさ、影、または低コントラストを効果的に処理するのが得意ではありません。夜間の交通ビデオ検知において影響力を持たせるには、現実世界の夜間条件を反映した専門的なデータセットでファインチューニングする必要があります。
ファインチューニング、またはカスタム学習には、ヘッドライトのまぶしさの中の車両、横断歩道の歩行者、夜間の混雑した交差点など、低照度条件下で撮影された追加のラベル付け画像でモデルを学習させ、夜間シーン特有の特徴を学習させることが含まれます。
カスタム学習が完了すると、モデルは検知、追跡、セグメンテーション、または分類といったタスクを、低照度条件下ではるかに高い精度でサポートできるようになります。これにより、交通当局は車両カウント、速度推定、適応信号制御、夜間の事故防止といった実用的なユースケースにこれらのモデルを適用できます。
Link to this section夜間の交通ビデオ検知のためのビジョンAIアプリケーション#
次に、現実世界の夜間交通システムでコンピュータビジョンをどのように採用できるかを見ていきましょう。
Link to this sectionスマート信号機はスマートシティ計画を支援できる#
都市の交差点は、特に視界が低下し交通の流れが予測しにくくなる夜間には、管理が最も難しいエリアの一つです。従来の信号機は、リアルタイムの変化に対応できない固定タイマーに依存しています。研究によると、これはドライバーの時間を無駄にするだけでなく、不必要な燃料消費と遅延にもつながります。
まさにその課題を克服するために、コンピュータビジョンシステムが役立ちます。これらのシステムは、車両の動きを監視し、リアルタイムで車両数を検知できます。データはアダプティブ交通制御システムに供給され、これにより信号機は実際の道路状況に応じて迅速に調整できます。つまり、ある車線が混雑している一方で別の車線が空いている場合、渋滞を解消するために信号のタイミングを即座に調整できるのです。
Link to this section事故防止#
夜間の運転は、視界の低下、不均一な照明、まぶしさによって距離を判断するのが難しくなるため、日中よりも危険です。実際、研究によると、夜間の1キロメートルあたりの死亡事故率は、日中の最大3倍になる可能性があります。
固定式監視カメラ、道路パトロール、車両検知センサー、固定時間信号システムといった従来の監視方法は、事後対応的であり、事故が発生する前に危険な状況を十分に早期に検知できない場合があります。
コンピュータビジョンソリューションは、ライブビデオストリームを分析し、道路や高速道路上の異常なパターンを検知することで、この懸念に対応できます。オブジェクト追跡を使用することで、これらのシステムはリアルタイムで車両の行動を監視し、異常と思われる際にアラートを出すことができます。
例えば、移動中の車両が車線変更をしている、混雑したエリアで走行速度が速すぎる、または急激に減速している場合、システムはリアルタイムで警告を発することができます。つまり、当局は迅速に対応し、事故が発生する前に防止できるということです。
Link to this section自動運転とADAS#
自動運転車やADASにとって、夜間運転は独自の課題をもたらします。視界不良と予測不可能な交通パターンにより、従来のセンサーが確実に機能しにくくなり、安全上の懸念が生じます。
コンピュータビジョンは、オブジェクト検知、車線追跡、セグメンテーションといったタスクを処理することでこれらのシステムを強化し、低照度環境下でも歩行者、他の車、障害物を認識できるようにします。周囲を3DでマッピングするレーダーやLiDAR(光による検知と測距)と組み合わせることで、追加された視覚層がADASの早期警告を支援し、自動運転車が夜間により安全に走行するために必要な認識力を提供します。

図4. 日中と夜間の両方の条件で撮影された車両映像 (出典)
Link to this section法執行と違反検知#
速度違反は、世界中の交通死亡事故の3件に1件の原因となっており、そのリスクは夜間にさらに高まります。暗闇は、日中には鮮明な詳細情報が暗闇の後にはぼやけてしまうことが多いため、交通警察が違反を捕まえるのをより困難にします。
そのため、空いている道路での速度違反、信号無視、車線逸脱といった違反が罰せられないことがよくあります。コンピュータビジョンは、赤外線カメラを使用して低照度環境下でも違反を検知することで、この問題に取り組んでいます。これらのシステムは、インシデントが記録される検知ゾーンを作成し、誤検知を減らし、明確で検証可能な証拠を提供します。交通当局にとって、これは盲点が減り、手動チェックへの依存が減ることを意味します。
Link to this section夜間交通ビデオ検知の利点と欠点#
夜間交通ビデオ検知にビジョンAIを使用する利点は以下の通りです。
- スケーラビリティ: 一度ファインチューニングされたモデルは、多くのカメラや交差点に展開でき、都市規模の監視をサポートできます。
- 予測分析: 過去のビデオデータを使用して、渋滞や事故多発ゾーンを予測し、予防策をサポートできます。
- リソースの最適化: 道路パトロールや緊急サービスをより効率的に割り当てるために役立つリアルタイムの洞察を当局に提供します。
利点にもかかわらず、ビジョンAIを使用した夜間交通検知にはいくつかの制限もあります。念頭に置くべきいくつかの要因は以下の通りです。
-
データ依存: ビジョンAIシステムの精度は、さまざまな夜間条件を捉えた大規模で高品質なデータセットへのアクセスに大きく依存しています。
-
環境的な課題: 雨、霧、もやなどの気象要因や、カメラレンズの汚れや位置のずれといった実用的な問題は、検知性能を低下させ、定期的なメンテナンスが必要になる場合があります。
-
ハードウェア要件: 高度なAIモデルの実行には、多くの場合高性能なGPUや専用のエッジデバイスが必要となり、大規模な展開にはコストがかかり、複雑になる可能性があります。
Link to this section夜間のインテリジェント交通システムの未来#
都市が成長し道路が忙しくなるにつれて、夜間の交通検知はよりインテリジェントで応答性の高いシステムへと移行しています。例えば、サーマルカメラや赤外線センサーは、人や車両からの熱シグネチャを検知でき、完全な暗闇の中でも視覚化を可能にします。これにより、標準的なカメラがまぶしさや低照度で苦戦する際に発生するエラーを減らすことができます。

図5. 暗視技術は夜間の歩行者検知を強化します (出典)
もう一つの拡大しているアプローチはカメラ-LiDARフュージョンです。カメラは道路の詳細な画像を提供し、LiDARは正確な3Dマップを生成します。これらを併用することで、特に低照度や中程度の霧の中で、車線、車両、障害物を検知する精度が向上します。
同時に、低照度画像補正、歩行者認識、ナンバープレート識別の進歩により、コンピュータビジョンの能力が拡大しています。これらの改善により、照明が不十分な道路や交差点であっても、より信頼性が高くエラーの少ない監視が可能になっています。
Link to this section重要なポイント#
夜間の車両検知は、交通監視にとって常に課題でしたが、コンピュータビジョンによって管理しやすくなっています。まぶしさの影響を軽減し、複雑な交通シーンを処理することで、暗闇の後に道路がどのように機能するかについて、より正確な全体像を提供します。これらのシステムが進化を続けるにつれ、夜間のより安全で、より賢く、より効率的な交通への道が開かれています。
ビジョンAIをプロジェクトに統合する準備はできましたか?活発なコミュニティに参加し、自動車業界におけるAIやロボット工学におけるビジョンAIなどのイノベーションを発見してください。詳細については、GitHubリポジトリにアクセスしてください。今日からコンピュータビジョンを始めるには、ライセンスオプションをご確認ください。






