Ultralytics YOLO11による道路の安全性:より安全な街のためのAI検出
Ultralytics YOLO11が、道路の陥没検出、速度推定、歩行者追跡、停止車両認識を通じて、どのように道路の安全性を向上させるかを発見してください。

交通安全の確保は、都市計画家、運輸当局、および自律走行車システムにとって重要な課題です。毎年、危険な道路状況、視界不良、予期せぬ障害物が原因で数百万件もの事故が発生しています。
世界保健機関 (WHO) によると、交通事故による負傷は世界的な主要死亡原因の一つであり、年間190万人以上が亡くなっています。これらの問題に対処するには、従来の監視手法を超えた革新的なソリューションが必要です。
人工知能 (AI) と コンピュータビジョン を交通安全に統合する取り組みが、有望なアプローチとして浮上しています。Ultralytics YOLO11 のようなモデルは、リアルタイムでの物体検知、追跡、分類 において強力な機能を提供し、ドライバーと歩行者の双方にとって道路をより安全にします。
本記事では、交通安全における主要な課題と、YOLO11がどのようにスマートなインフラストラクチャをサポートできるかを探ります。
Link to this section交通安全における課題の理解#
技術の進歩にもかかわらず、交通安全管理は依然として重大な課題に直面しています:
- 危険な道路状況: ポットホール(道路の穴)、ひび割れ、道路の破片は、特に整備が不十分な地域において、車両の損傷や事故の一因となります。
- スピード違反と無謀な運転: 多くの地域で制限速度を効果的に取り締まることは依然として課題であり、高い事故率の一因となっています。
- 歩行者の安全リスク: 未規制の横断歩道、視界不良、わき見運転は、特に都市部において歩行者を危険にさらしています。
- 交通の混乱: 故障などで立ち往生した車両は、しばしば渋滞を引き起こし、追突事故の可能性を高めます。
これらの課題は、対応時間を短縮し、全体的な交通安全を向上させる自動化されたリアルタイム監視システムの必要性を浮き彫りにしています。YOLO11のようなコンピュータビジョンモデルは、高度な 検知 および分析機能を提供することで、これらの問題に対処する助けとなります。
Link to this section交通安全におけるコンピュータビジョンの進化#
交通安全のためのコンピュータビジョンは、AI、センサー技術、データ処理の進歩とともに向上してきました。初期段階では、コンピュータビジョンアルゴリズムは主に自動ナンバープレート認識や単純な交通監視に使用され、法執行機関が違反を追跡し交通の流れを最適化するのを支援していました。
これらの初期システムはルールベースの画像処理技術に依存しており、精度が制限されることが多く、機能するには理想的な照明や天候条件が必要でした。
YOLO11のような高速なYOLOモデルの導入は、交通安全監視におけるリアルタイム検知の限界をさらに押し広げました。
画像に対して複数回のパスを必要とした従来の手法とは異なり、YOLOモデルはフレーム全体をリアルタイムで処理できるため、高速で移動する車両の追跡、車線違反の検知、道路欠陥の特定が可能になりました。
今日、自動車におけるコンピュータビジョンは、都市や運輸機関がAIカメラを活用する一助となっています。これらのカメラは、人間の手をほとんど借りずに、車両の速度監視、交通違反の発見、道路上の危険の特定を行います。
スマートシティ構想において、コンピュータビジョンアルゴリズムを活用した歩行者検知や動的な交通信号調整は、横断歩道や交差点での事故削減に貢献します。一方、自律走行車の研究では、ナビゲーション、障害物回避、状況認識のために、車載システムでのコンピュータビジョン活用が続いています。
Link to this sectionYOLO11は交通安全にどのように応用できるか#
道路監視の自動化と検知機能の強化により、YOLO11がより安全な道路状況に貢献できる主要な方法をいくつか探ってみましょう。
Link to this sectionポットホール(道路の穴)の検知#
ポットホールは交通安全上の大きな懸念であり、車両損傷、メンテナンスコストの増大、そして事故の原因となります。従来の道路点検は手動評価に依存しており、時間もかかり非効率的です。
YOLO11を使用すると、車両やドローンに搭載されたカメラからのリアルタイム画像解析により、ポットホール検知を自動化できます。YOLO11を学習させることで、ひび割れ、ポットホール、表面の変形を検知でき、自治体や道路当局はより効率的に修理の優先順位を決定できます。
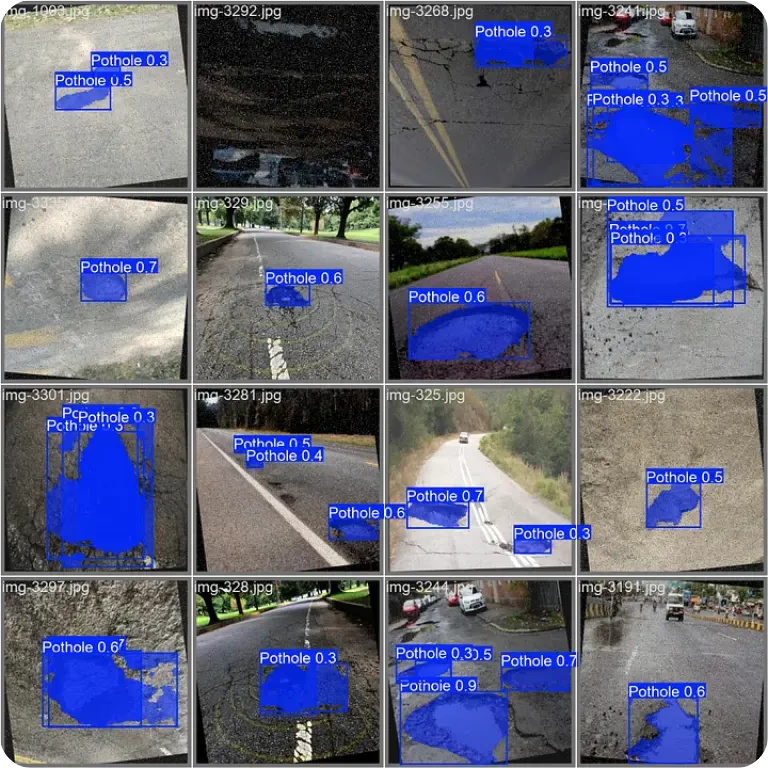
図1. YOLO11は物体検知を使用して道路上のポットホールを特定し、自動化された道路状況監視と効率的なメンテナンス計画を可能にします。
例えば、高速道路のメンテナンスチームは、YOLO11を搭載したドローンを展開して道路をスキャンし、道路状況に関する詳細なレポートを作成できます。このデータは、タイムリーな修理計画を立てるために使用でき、ドライバーのリスクを最小限に抑え、インフラ全体の品質を向上させます。
メンテナンス以外にも、ポットホール検知を自律走行車システムに統合することで、自動運転車がポットホールをリアルタイムで検知し、損傷した道路セクションに近づく際にルートを調整したり減速したりできるようになります。これは車両の摩耗を減らすだけでなく、急ブレーキを最小限に抑えることにもなり、交通渋滞や追突事故の防止にもつながります。
Link to this section速度推定#
スピード違反は事故の主な原因ですが、制限速度を効果的に取り締まることは依然として課題です。YOLO11は、道路脇のカメラからの映像を解析することで、車両速度を推定する手助けをします。追跡 を使用してフレームごとに車両を追跡することで、YOLO11はリアルタイムで速度を計算し、交通取り締まりのための貴重な洞察を提供できます。
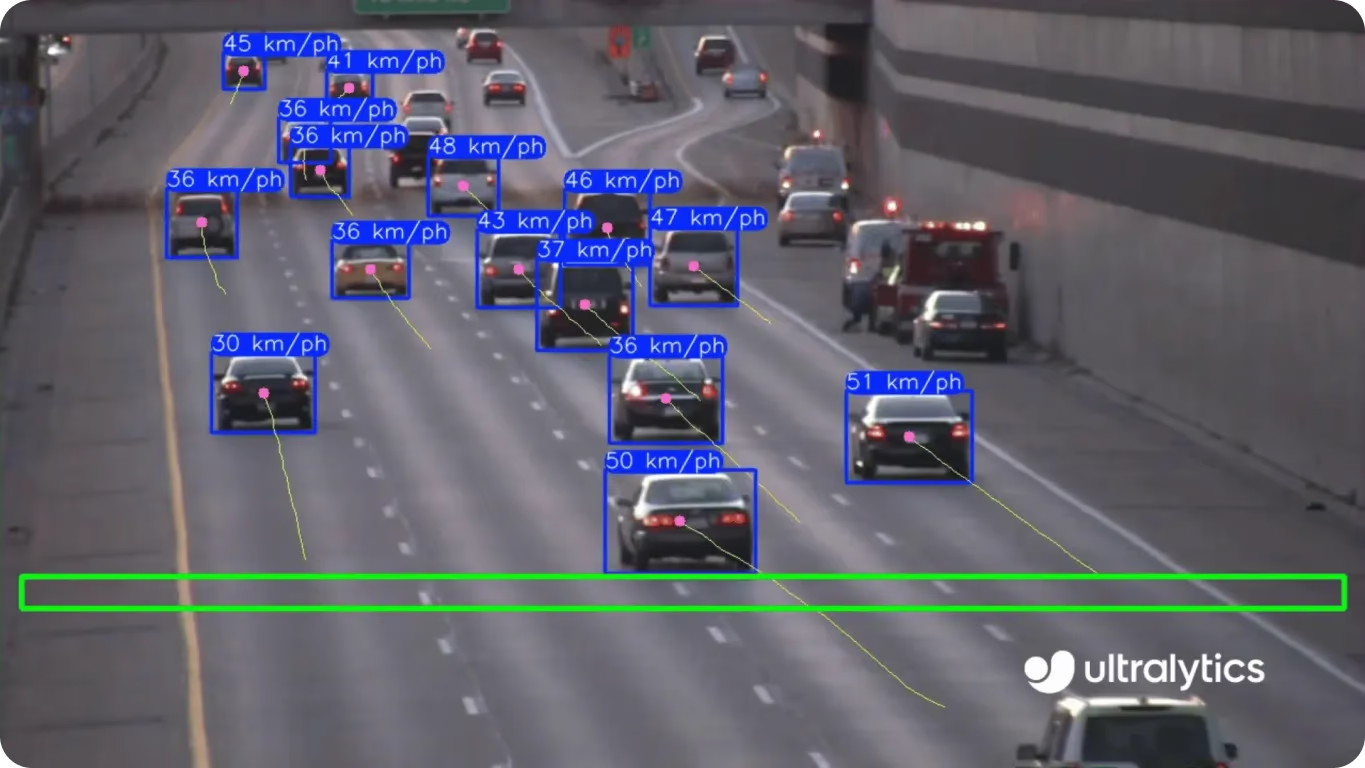
図2. YOLO11は高速道路での車両速度を推定し、交通管理と取り締まりのための洞察を提供して、交通安全と渋滞制御を向上させます。
例えば、運輸当局はYOLO11を既存の交通監視システムに統合し、速度違反の多発箇所を監視できます。このデータは、高リスクエリアでの制限速度調整や特定の場所への法執行官の配置など、政策決定の根拠となります。
さらに、YOLO11の速度推定機能はスマートシティ構想において、交通流を改善し渋滞を減らすために使用できます。都市計画者は、道路の各セクションでの車両速度を分析することで、交通信号を最適化し、動的に車両を迂回させることができます。
Link to this section歩行者検知#
歩行者の安全は都市部においてますます懸念されており、交通量の多さやわき見運転が頻繁な事故の一因となっています。従来の監視システムは、特に低照度条件下で歩行者を正確に検知するのに苦労することがよくあります。
YOLO11は、道路を横断中、交差点で待機中、または走行中の車両の近くを移動中の個人を特定することで、歩行者検知を強化できます。交通信号機や自律走行車に搭載されたカメラは、YOLO11を使用してリアルタイムで歩行者を検知し、それに応じて交通信号を調整できます。
正確な歩行者検知を確実にするため、YOLO11は横断歩道、歩道、交差点など、さまざまな環境における歩行者のラベル付けされた画像を含む大規模な データセット で学習できます。これらのデータセットは、異なる角度、オクルージョン(遮蔽)、群衆密度を考慮しており、検知の信頼性を向上させます。

図3. YOLO11は横断歩道での歩行者を検知し、リアルタイムの歩行者認識を改善することで交通安全を強化します。
例えば、スマートシティ環境では、歩行者検知を横断歩道管理システムに統合し、歩行者が横断している間は信号が確実に赤のままになるようにできます。
さらに、バス停や地下鉄駅などの公共交通ハブでは、歩行者検知を使用して群衆の動きを分析し、電車やバスのスケジュールを最適化できます。これにより、効率的な乗客の流れが確保され、混雑時の待ち時間が短縮されます。
Link to this section立ち往生車両の検知#
立ち往生や故障した車両は、交通流を乱し、他のドライバーにとって危険な状況を作り出す可能性があります。これらの車両を迅速に検知することは、渋滞を防ぎ、事故リスクを最小限に抑えるために不可欠です。
YOLO11は、高速道路、橋、トンネル上で立ち往生した車両を認識するように 学習 させることができます。道路脇のカメラからのリアルタイム映像を分析することで、YOLO11は交通を妨げている停止車両を検知できます。
例えば、高速道路管理センターは、YOLO11を活用した監視システムを使用して立ち往生車両を特定し、ロードサービスをより迅速に派遣できます。この予防的なアプローチは、二次事故を防ぎ、交通が円滑に流れるようにする助けとなります。
Link to this section交通安全におけるYOLO11活用のメリット#
YOLO11を交通安全システムに統合することには、いくつかの利点があります:
- 監視の強化: 道路上の危険、スピード違反車両、歩行者のリアルタイム検知により、交通管理が向上します。
- 精度の向上: YOLO11の物体検知機能により誤検知が減少し、信頼性の高い監視が保証されます。
- 対応時間の短縮: 自動化されたシステムにより、交通安全上の問題を即座に検知し、より迅速な介入が可能になります。
- コスト削減: 事故を減らし、交通流を最適化することで、道路メンテナンスや緊急対応コストが低下します。
- 拡張性: YOLO11は、都市の通りから高速道路まで、さまざまな環境に展開でき、多様な安全イニシアチブをサポートします。
Link to this sectionコンピュータビジョンによる交通安全の未来#
YOLO11は交通安全のために強力なリアルタイム検知を提供しますが、コンピュータビジョンとAIの将来の進歩は、交通安全をさらに前進させる可能性があります。
一つの有望な開発は予測型交通管理です。AIモデルが道路センサー、カメラ、気象条件からの膨大なデータを分析し、潜在的な渋滞や事故多発ゾーンを予測します。
これにより、当局は道路状況に基づいて制限速度を動的に調整したり、ボトルネックが発生する前に交通を迂回させたりするなど、予防的な措置を講じることが可能になります。
もう一つの有望な方向性は、自律型交通制御システムです。コンピュータビジョンシステムをスマートシティインフラと統合することで、交通信号がリアルタイムで調整され、緊急車両を優先したり、交差点での遅延を減らしたり、車両や歩行者の円滑な流れを確保したりできるようになります。
AIを活用した道路監視の継続的な改善により、コンピュータビジョンは輸送安全の未来を形作る上でさらに大きな役割を果たす態勢が整っています。
Link to this section重要なポイント#
交通安全は依然として差し迫った世界的な課題ですが、AIとコンピュータビジョンの進歩は改善のための新たな機会を提供しています。ポットホール検知、速度推定、歩行者監視、立ち往生車両検知にYOLO11を活用することで、運輸当局や都市計画家は、より安全で効率的な道路網を構築できます。
交通流の最適化、事故防止、道路メンテナンスの改善のいずれにおいても、YOLO11は輸送安全を変革するコンピュータビジョンの可能性を示しています。YOLO11がよりスマートで持続可能な交通安全ソリューションにどのように貢献できるかをご覧ください。
私たちの コミュニティ に参加し、GitHubリポジトリ をチェックしてAIについて学びましょう。製造業におけるコンピュータビジョン や 自動運転におけるAI のさまざまな応用については、ソリューションページをご覧ください。利用可能な ライセンスオプション を確認して、始めましょう!






