Explorando la detección de objetos pequeños con Ultralytics YOLO11
Descubre cómo Ultralytics YOLO11 ofrece una detección de objetos pequeños rápida y precisa en aplicaciones del mundo real como la vigilancia y la robótica.

Los drones integrados con visión por IA pueden volar a cientos de metros del suelo, y aun así se espera que detecten a una persona que apenas aparece como unos pocos píxeles en su señal de vídeo. De hecho, es un desafío común en aplicaciones como la robótica, la vigilancia y la teledetección, donde los sistemas deben identificar objetos que son muy pequeños dentro de una imagen.
Pero los modelos tradicionales de detección de objetos pueden tener dificultades para lograrlo. Los objetos pequeños en imágenes y vídeos representan información visual muy limitada. Sencillamente, cuando un modelo los analiza, no hay mucho detalle del que aprender o que reconocer.
Internamente, estos modelos suelen depender de una arquitectura basada en redes neuronales convolucionales (CNN). Las imágenes pasan a través de capas de la red y se transforman en mapas de características o representaciones simplificadas que resaltan patrones relevantes en lugar de píxeles sin procesar.
A medida que la imagen avanza hacia capas más profundas de la red, estos mapas de características se vuelven más pequeños. Eso acelera el cálculo, pero también significa que los detalles finos pueden desaparecer.
Para objetos minúsculos, esos detalles son cruciales. Una vez que desaparecen, un modelo de visión artificial puede tener dificultades para detectar el objeto, lo que puede llevar a cajas delimitadoras menos precisas o inconsistentes.
Los sistemas de visión artificial de extremo a extremo en tiempo real hacen esto aún más complicado. Las imágenes de alta resolución ayudan a preservar el detalle, pero ralentizan la inferencia y requieren más potencia de GPU. Las resoluciones más bajas funcionan más rápido, pero los objetos pequeños se vuelven aún más difíciles de detectar.
Se convierte en un acto de equilibrio constante entre velocidad, precisión y límites de hardware. Gracias a los avances tecnológicos recientes, modelos de visión artificial como Ultralytics YOLO11 y el próximo Ultralytics YOLO26 están diseñados para gestionar este equilibrio de manera más efectiva.

Fig 1. Uso de YOLO11 para detectar objetos pequeños en imágenes aéreas (Fuente)
En este artículo, exploraremos por qué la detección de objetos pequeños es difícil y cómo YOLO11 puede facilitarla. ¡Empecemos!
Link to this section¿Qué es la detección de objetos pequeños y por qué es importante?#
La detección de objetos pequeños es una tarea de la visión artificial, una rama de la IA, que se centra en identificar y localizar objetos que ocupan una porción muy pequeña de una imagen. Estos objetos suelen estar representados dentro de la imagen por un número limitado de píxeles, que son las unidades más pequeñas de una imagen digital. Esto los hace más difíciles de detectar que los objetivos más grandes y claros (que a menudo contienen más píxeles).
Por ejemplo, vehículos en imágenes aéreas, herramientas en el suelo de una fábrica o personas captadas por cámaras de vigilancia gran angular, pueden aparecer como objetos pequeños dentro de la imagen. Detectarlos es importante porque a menudo contienen información crítica, y muchas aplicaciones del mundo real, como la vigilancia, dependen de estas detecciones para funcionar correctamente.
Cuando se pasan por alto objetos pequeños, el rendimiento del sistema y la toma de decisiones pueden verse afectados. El monitoreo con vehículos aéreos no tripulados (UAV) es un buen ejemplo, donde no detectar un objeto pequeño en movimiento en el suelo puede afectar la precisión de la navegación o el seguimiento.
Link to this sectionDesafíos relacionados con la detección de objetos pequeños#
Los sistemas anteriores utilizaban características diseñadas manualmente y métodos tradicionales de visión artificial, los cuales tenían problemas en escenas concurridas o variadas. Incluso hoy en día, con modelos de aprendizaje profundo que funcionan mucho mejor, detectar objetivos pequeños sigue siendo difícil cuando solo ocupan una parte minúscula de la imagen.
A continuación, analicemos algunos de los desafíos comunes que aparecen en diferentes escenarios del mundo real al detectar objetos pequeños.
Link to this sectionTamaño, píxeles y pérdida de información#
Los objetos pequeños contienen muy pocos píxeles, lo que limita la cantidad de detalle visual que un modelo puede aprender durante etapas como la extracción de características. Como resultado, patrones como bordes, formas y texturas son más difíciles de detectar, lo que hace que los objetos pequeños tengan más probabilidades de mezclarse con el fondo.
A medida que las imágenes avanzan a través de capas convolucionales de una red neuronal, la información visual en los píxeles se comprime gradualmente en mapas de características. Esto ayuda a que el modelo sea eficiente, pero también significa que los detalles finos se desvanecen.
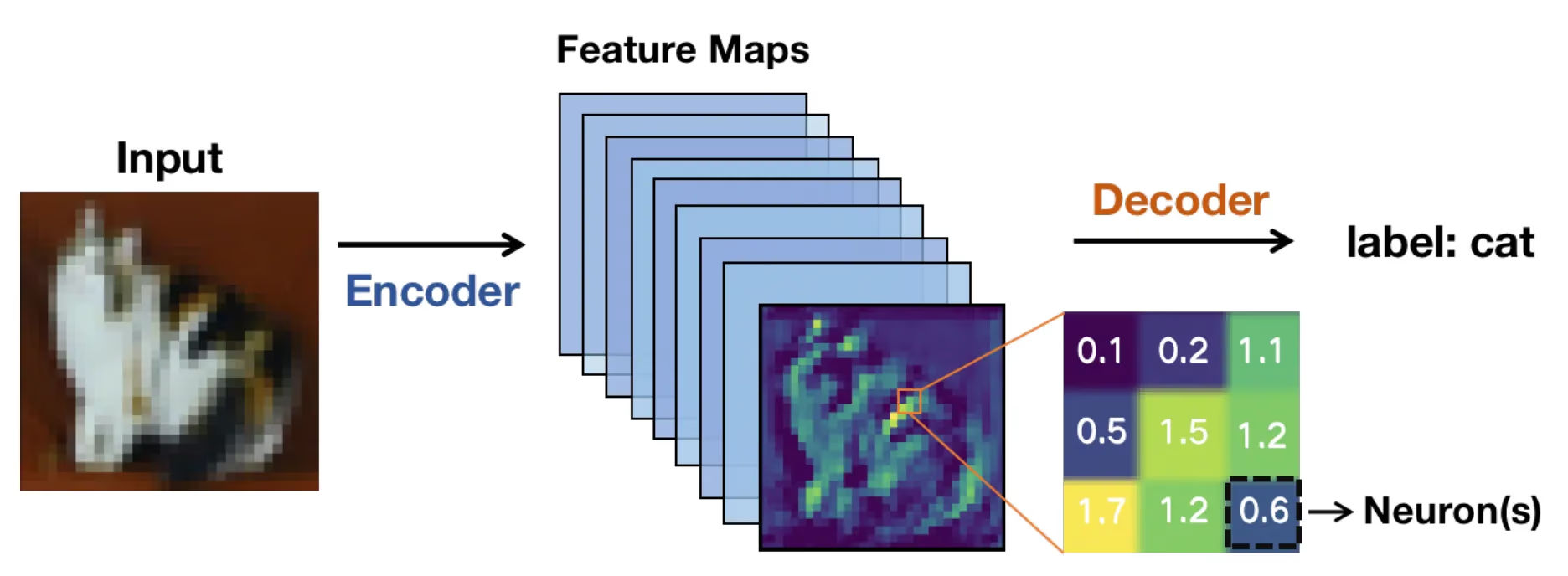
Fig 2. Los mapas de características representan patrones visuales en una imagen (Fuente)
Para objetivos pequeños, las señales importantes pueden desaparecer antes de que la red de detección tenga la oportunidad de actuar. Cuando eso sucede, la localización se vuelve menos fiable y las cajas delimitadoras pueden desplazarse, solaparse o pasar por alto los objetos objetivo por completo.
Link to this sectionOclusión, variación de escala y contexto#
Los desafíos relacionados con el tamaño también suelen ser causados por la oclusión. La oclusión ocurre cuando los objetos, especialmente los más pequeños, están ocultos parcialmente por otros objetos en la escena.
Esto reduce el área visible de un objetivo, lo que limita la información disponible para el detector de objetos. Incluso una pequeña oclusión puede confundir a las redes de detección, especialmente cuando se combina con una entrada de baja resolución. Un ejemplo interesante de esto se puede ver en conjuntos de datos de UAV como VisDrone, donde peatones, bicicletas o vehículos pueden estar bloqueados parcialmente por edificios, árboles u otros objetos en movimiento.
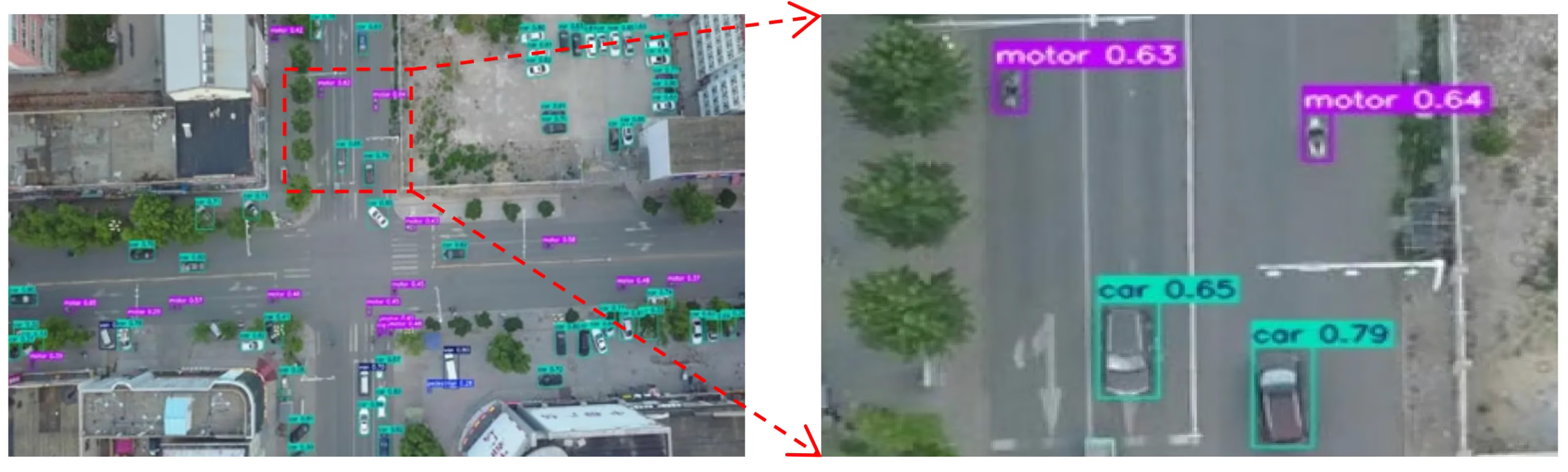
Fig 3. Un ejemplo del conjunto de datos VisDrone que muestra objetos pequeños (Fuente)
De manera similar, la variación de escala introduce otro nivel de dificultad cuando el mismo objeto aparece muy pequeño o relativamente grande dependiendo de la distancia y la posición de la cámara. A pesar de estos obstáculos, los algoritmos de detección deben reconocer estos objetos pequeños a través de diferentes escalas sin perder precisión.
El contexto también juega un papel importante en la detección. Por ejemplo, los objetos grandes suelen aparecer con entornos claros que proporcionan señales visuales útiles. Por otro lado, los objetivos pequeños a menudo carecen de esta información contextual, lo que dificulta el reconocimiento de patrones.
Link to this sectionEl problema de la métrica oculta en la detección de objetos pequeños#
Las métricas de evaluación comunes, como Intersection over Union (IoU), miden qué tan bien se superpone una caja delimitadora predicha con la caja real (ground-truth). Si bien el IoU funciona bien para objetos más grandes, su comportamiento es bastante diferente para los pequeños.
Los objetos pequeños ocupan solo unos pocos píxeles, por lo que incluso un cambio menor en la caja predicha puede crear un error proporcional grande y reducir drásticamente la puntuación IoU. Esto significa que los objetos pequeños a menudo no cumplen con el umbral estándar de IoU utilizado para contar una predicción como correcta, incluso cuando el objeto es visible en la imagen.
Como resultado, es más probable que los errores de localización se clasifiquen como falsos positivos o falsos negativos. Estas limitaciones han impulsado a los investigadores a repensar cómo los sistemas de detección de objetos evalúan y manejan objetivos pequeños y difíciles de detectar.
Link to this sectionCaracterísticas multiescala: La clave para la detección de objetos pequeños en tiempo real#
A medida que los investigadores trabajaron para mejorar la detección de objetos pequeños, quedó claro que preservar y representar la información visual a través de múltiples escalas es esencial. Esta idea se refleja en investigaciones recientes en arXiv y en ponencias presentadas en eventos como las Conferencias Internacionales del IEEE y la Asociación Europea de Visión Artificial (ECCV).
A medida que las imágenes avanzan hacia capas más profundas de una red neuronal, los objetos pequeños pueden perder detalles o desaparecer por completo, razón por la cual los modelos modernos de visión artificial como YOLO11 ponen un gran enfoque en una mejor extracción de características. A continuación, repasemos los conceptos fundamentales detrás de los mapas de características y las redes de pirámide de características para entenderlos mejor.
Link to this sectionMapas de características y representación de escala#
Cuando una imagen de entrada, como una imagen de teledetección, ingresa a una red neuronal, se transforma gradualmente en mapas de características. Estas son representaciones simplificadas de la imagen que resaltan patrones visuales como bordes, formas y texturas.
A medida que la red profundiza, estos mapas de características se vuelven más pequeños en tamaño espacial. Esta reducción ayuda al modelo a ejecutarse de manera eficiente y a centrarse en información de alto nivel. Sin embargo, los mapas de características reducidos y profundos también disminuyen el detalle espacial.
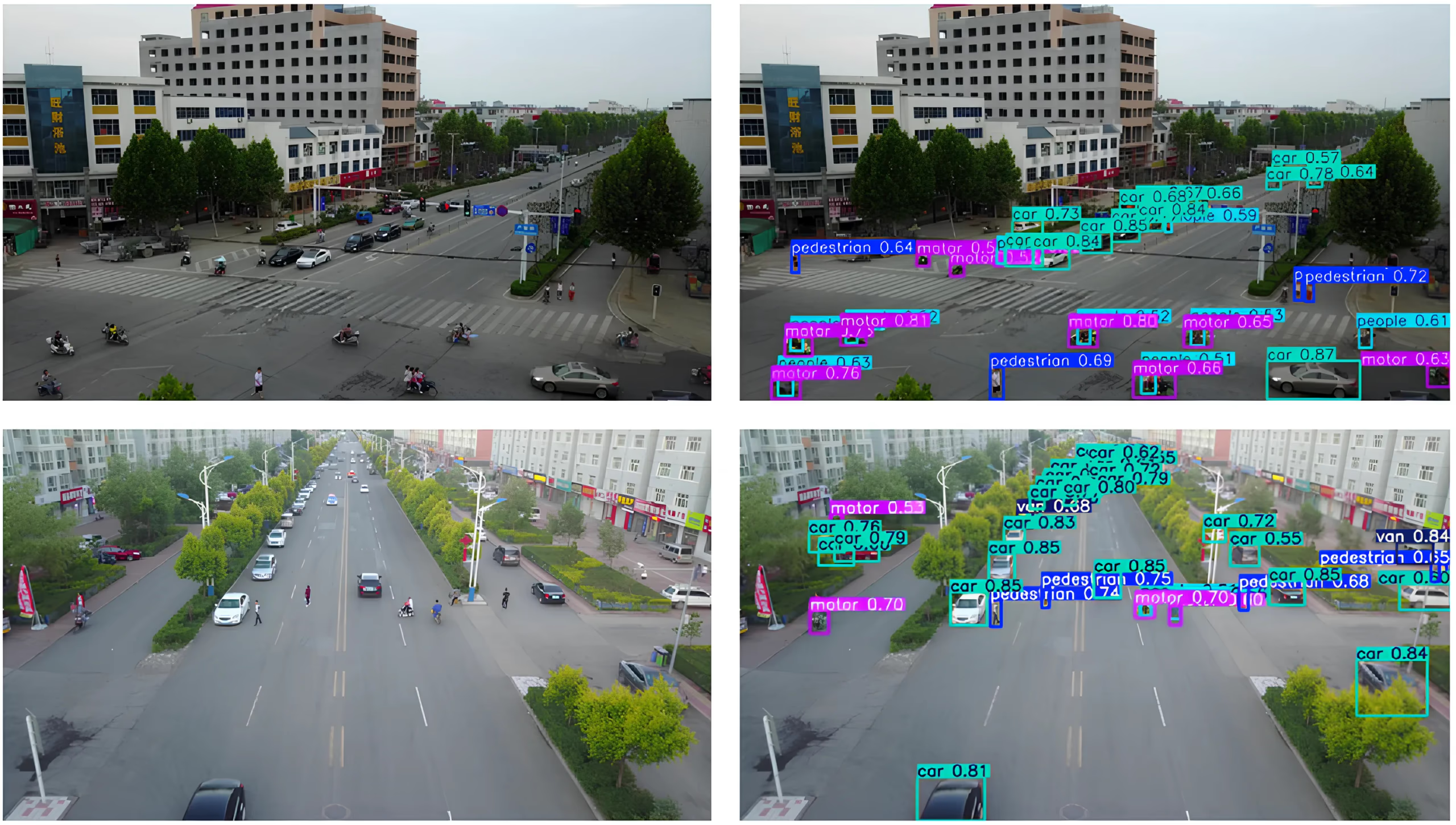
Fig 4. La extracción de características es clave para la detección de objetos pequeños. (Fuente)
Aunque los objetos grandes conservan suficiente información visual para una detección precisa, los objetivos pequeños pueden perder detalles críticos después de solo unas pocas capas de red. Cuando esto sucede, un modelo puede tener dificultades para reconocer siquiera que existe un objeto pequeño. Esta es una de las razones principales por las que se pasan por alto los objetos pequeños en los modelos de detección de objetos profundos.
Link to this sectionRedes de pirámide de características y aprendizaje multiescala#
Las redes de pirámide de características, a menudo llamadas FPN, se introdujeron para abordar la pérdida de detalle espacial, y funcionan como un módulo de apoyo que combina información de múltiples capas para que los modelos puedan detectar objetos pequeños de manera más efectiva. Este proceso también se conoce como agregación y fusión de características.
Las capas superficiales proporcionan detalles espaciales finos, mientras que las capas más profundas añaden contexto semántico, lo que permite un aprendizaje eficaz de características multiescala. A diferencia del muestreo ascendente ingenuo, que simplemente agranda los mapas de características, las FPN preservan información significativa y mejoran la detección de objetos pequeños.
Los enfoques modernos se basan en esta idea utilizando la fusión adaptativa de características y diseños conscientes del contexto para mejorar aún más la detección de objetivos pequeños. En otras palabras, las FPN ayudan a los modelos a ver tanto la imagen general como los detalles minúsculos al mismo tiempo. Esta optimización es esencial cuando los objetos son pequeños.
Link to this sectionCómo evolucionaron los modelos de detección de objetos para manejar objetos pequeños#
Aquí tienes un vistazo de cómo los modelos de detección de objetos han evolucionado y avanzado con el tiempo para detectar mejor objetos de diferentes tamaños, incluidos los muy pequeños:
- Métodos de detección tempranos: Los primeros enfoques de detección de objetos dependían de características diseñadas manualmente y algoritmos basados en reglas arraigados en el procesamiento de imágenes clásico. Como estas características eran fijas, el rendimiento se degradaba con diferentes imágenes.
- Introducción del aprendizaje automático y aprendizaje profundo: La adopción del aprendizaje automático y profundo marcó un cambio importante en la investigación de la detección de objetos. En lugar de depender de reglas predefinidas, las redes neuronales aprendieron representaciones visuales directamente de los datos de entrenamiento, mejorando la adaptabilidad en diferentes tamaños de objetos y escenas.
- Redes convolucionales: Estas redes neuronales aprenden a ver patrones en las imágenes. Cada capa capta diferentes detalles, comenzando con bordes y colores simples, luego formas y, finalmente, objetos completos, lo que las hace esenciales para la visión artificial moderna.
- Detectores de objetos de dos etapas: Los detectores de dos etapas, como Faster R-CNN, introducidos por Girshick y Ren, generaban primero regiones candidatas y luego las clasificaban. Este enfoque mejoraba la precisión para objetos pequeños, pero aumentaba el costo computacional y reducía el rendimiento en tiempo real.
- Detectores de objetos de una sola etapa: Los detectores de una sola etapa, como SSD (Single-Shot Detector) y la familia YOLO (You Only Look Once), incluyendo YOLOv3, Ultralytics YOLOv5 y, posteriormente, Ultralytics YOLOv8, realizan la detección en una sola pasada. Este diseño mejora significativamente la velocidad de inferencia mientras mantiene una precisión competitiva.
- Modelos de última generación: Los modelos de detección de objetos más nuevos ponen un mayor enfoque en el rendimiento en tiempo real y el despliegue en el borde (edge). Los lanzamientos recientes de modelos Ultralytics YOLO, como Ultralytics YOLO11 y el próximo Ultralytics YOLO26, están diseñados para equilibrar una alta precisión con una inferencia de baja latencia, lo que los hace muy adecuados para detectar objetos de todos los tamaños, incluidos objetivos pequeños, en dispositivos con potencia de cálculo limitada.
Link to this sectionUso de YOLO11 para casos de uso de detección de objetos pequeños#
Ahora que entendemos mejor cómo funciona la detección de objetos pequeños, veamos un par de aplicaciones del mundo real donde se puede aplicar YOLO11.
Link to this sectionUAV e imágenes aéreas#
Imagina un dron volando alto sobre una concurrida calle de la ciudad. Desde esa altura, los coches, las bicicletas e incluso las personas se reducen a solo unos pocos píxeles en una pantalla.
Los módulos de UAV e imágenes aéreas a menudo capturan escenas como esta, donde los objetos de interés son minúsculos y están rodeados de fondos complicados, lo que los hace difíciles de detectar para los modelos de visión artificial.
En este tipo de escenarios, YOLO11 puede ser una opción de modelo ideal. Por ejemplo, un dron equipado con un modelo como YOLO11 podría monitorear el tráfico en tiempo real, detectando vehículos, ciclistas y peatones a medida que se mueven por la escena, incluso cuando cada objeto solo ocupa una pequeña porción de la imagen. Esto permite una toma de decisiones más rápida y perspectivas más precisas en aplicaciones como la gestión del tráfico, la seguridad pública o la planificación urbana.
Link to this sectionRobótica y automatización#
Los robots se utilizan a menudo en entornos donde la precisión y el tiempo son críticos. En entornos como almacenes, fábricas y granjas, un robot puede necesitar reconocer objetos muy pequeños, como una pieza en una línea de montaje, una etiqueta en un paquete o un pequeño brote de planta en un campo, y responder rápidamente.
Detectar objetos de este tamaño puede ser complicado, especialmente cuando aparecen como solo unos pocos píxeles en la señal de la cámara o están parcialmente ocluidos por otros objetos. Pasar por alto estos pequeños detalles puede ralentizar la automatización o afectar la capacidad del robot para completar una tarea.
YOLO11 puede marcar la diferencia en estas situaciones. Su extracción de características mejorada y su rápida inferencia permiten a los robots detectar objetos pequeños en tiempo real y actuar de inmediato.
YOLO11 también admite la segmentación de instancias, lo que puede ayudar a los robots a entender los límites de los objetos y los puntos de agarre con mayor precisión, en lugar de solo localizar cajas delimitadoras generales. Por ejemplo, un brazo robótico integrado con YOLO11 podría detectar componentes pequeños en una cinta transportadora, segmentar su forma exacta y recogerlos antes de que salgan de su alcance, ayudando a que el sistema sea eficiente y fiable.
Link to this section¿Qué hace que YOLO11 sea eficaz para la detección de objetos pequeños?#
Con tantos modelos de visión artificial disponibles hoy en día, es posible que te preguntes qué hace que Ultralytics YOLO11 destaque.
Aquí tienes algunas razones por las que Ultralytics YOLO11 es una gran opción para aplicaciones donde se necesitan detectar objetos pequeños:
- Mejor extracción de características: YOLO11 utiliza una arquitectura de backbone y neck mejorada para potenciar la extracción de características, permitiendo una detección de objetos más precisa.
- Ecosistema y facilidad de uso: El paquete Python de Ultralytics es una biblioteca que proporciona funciones integradas para cargar, entrenar, validar y desplegar modelos como YOLO11. Dado que estos flujos de trabajo requieren solo unas pocas líneas de código, los equipos pueden experimentar rápidamente y ajustar modelos para la detección de objetos pequeños.
- Optimizado para despliegue en el borde: YOLO11 puede ejecutarse de manera eficiente en dispositivos de borde (edge) como NVIDIA Jetson, Raspberry Pi y sistemas de cámaras industriales. Sencillamente, permite tareas de visión por IA en tiempo real directamente en el dispositivo.
Link to this sectionEstrategias prácticas para usar al detectar objetos pequeños con YOLO11#
Además de usar un modelo como YOLO11, la forma en que preparas tus anotaciones, el conjunto de datos general y el procedimiento de entrenamiento del modelo puede marcar una diferencia significativa en el rendimiento de la detección.
Aquí tienes un resumen rápido de en qué centrarte:
- Aumentación de datos adecuada: La aumentación de datos ligera, como el escalado o el recorte, puede ayudar al modelo a generalizar con nuevas imágenes. Sin embargo, una aumentación agresiva a gran escala puede distorsionar o eliminar objetos pequeños, haciéndolos más difíciles de aprender para el modelo.
- Observar los casos de fallo: Analizar dónde el modelo pasa por alto o identifica erróneamente objetos ayuda a crear una línea de base y revelar si los problemas provienen del conjunto de datos, de la pérdida de información durante la extracción de características o de la necesidad de ajustar la configuración del entrenamiento.
- Composición del conjunto de datos: Tu conjunto de datos debe contener suficientes ejemplos de objetos pequeños para que el modelo pueda aprender patrones significativos, y debe permanecer equilibrado para que los objetos más grandes no eclipsen a los más pequeños durante el entrenamiento.
Link to this sectionConclusiones clave#
La detección de objetos pequeños es difícil porque los objetivos pequeños pierden detalle a medida que las imágenes avanzan a través de un modelo de visión artificial. YOLO11 mejora la forma en que se preservan estos detalles, haciendo que la detección de objetos pequeños sea más fiable sin sacrificar el rendimiento en tiempo real. Este equilibrio permite a YOLO11 soportar una detección precisa y eficiente en aplicaciones del mundo real.
¡Únete a nuestra creciente comunidad! Explora nuestro repositorio de GitHub para aprender más sobre IA. Descubre innovaciones como visión artificial en el comercio minorista y IA en la industria automotriz visitando nuestras páginas de soluciones. Para empezar a crear con visión artificial hoy mismo, echa un vistazo a nuestras opciones de licencia.






