Una guía para profundizar en la detección de objetos en 2025
Aprende sobre la detección de objetos, su importancia en la IA y cómo modelos como YOLO11 están transformando industrias como los vehículos autónomos, la sanidad y la seguridad.
Muchas industrias están integrando rápidamente soluciones de inteligencia artificial (IA) en sus operaciones. De entre las muchas tecnologías de IA disponibles hoy en día, la visión artificial es una de las más populares. La visión artificial es una rama de la IA que ayuda a las computadoras a ver y comprender el contenido de imágenes y videos, tal como lo hacen los humanos. Hace posible que las máquinas reconozcan objetos, identifiquen patrones y den sentido a lo que ven.
Se estima que el valor del mercado global de la visión artificial crecerá hasta los 175.72 mil millones de dólares para 2032. La visión artificial abarca diversas tareas que permiten a los sistemas de IA visual analizar e interpretar datos visuales. Una de las tareas más esenciales y utilizadas de la visión artificial es la detección de objetos.
La detección de objetos se centra en localizar y clasificar objetos en datos visuales. Por ejemplo, si le muestras a una computadora una imagen de una vaca, puede detectar a la vaca y dibujar un cuadro delimitador (bounding box) a su alrededor. Esta capacidad es útil en aplicaciones del mundo real como el monitoreo de animales, coches autónomos y vigilancia.
¿Cómo se puede realizar la detección de objetos? Una forma es a través de modelos de visión artificial. Por ejemplo, Ultralytics YOLO11 es un modelo de visión artificial que admite tareas de visión artificial como la detección de objetos.
En esta guía, exploraremos la detección de objetos y cómo funciona. También hablaremos sobre algunas aplicaciones reales de la detección de objetos y Ultralytics YOLO11.
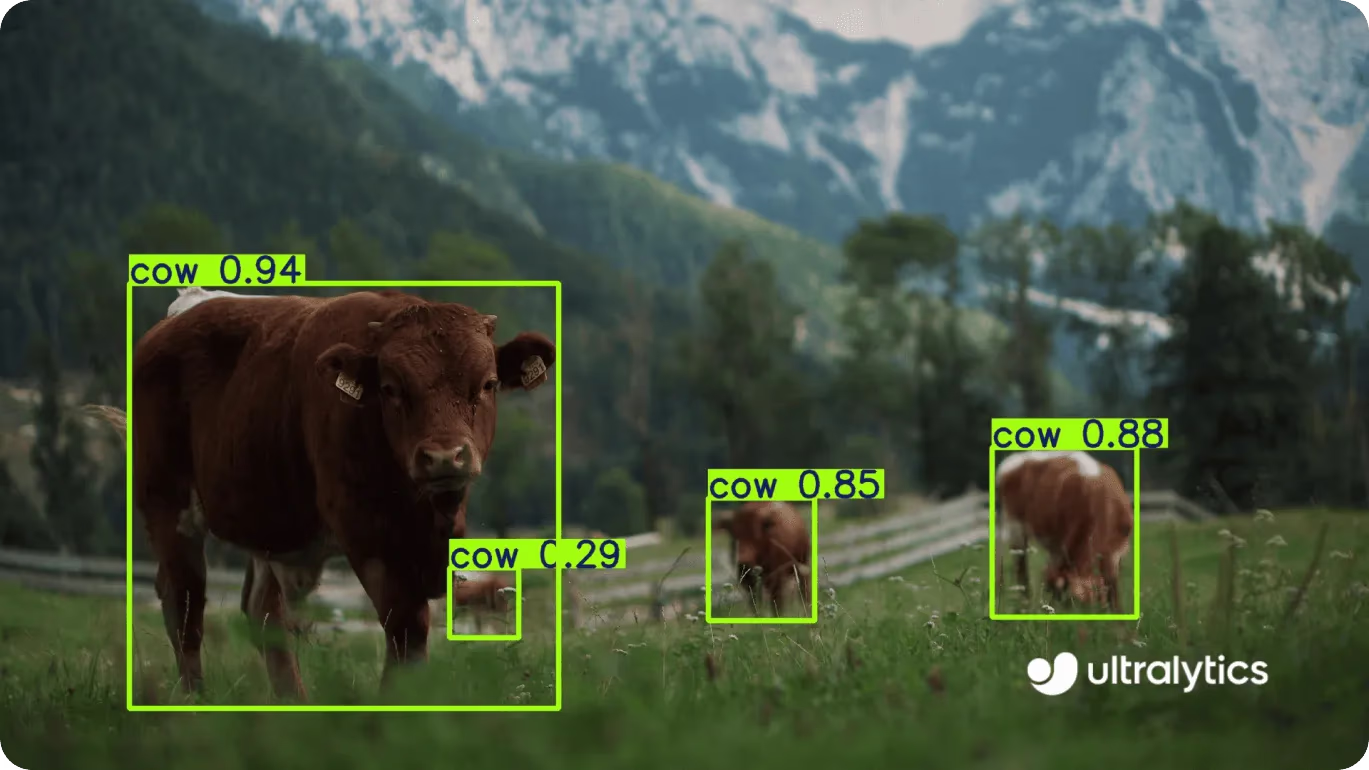
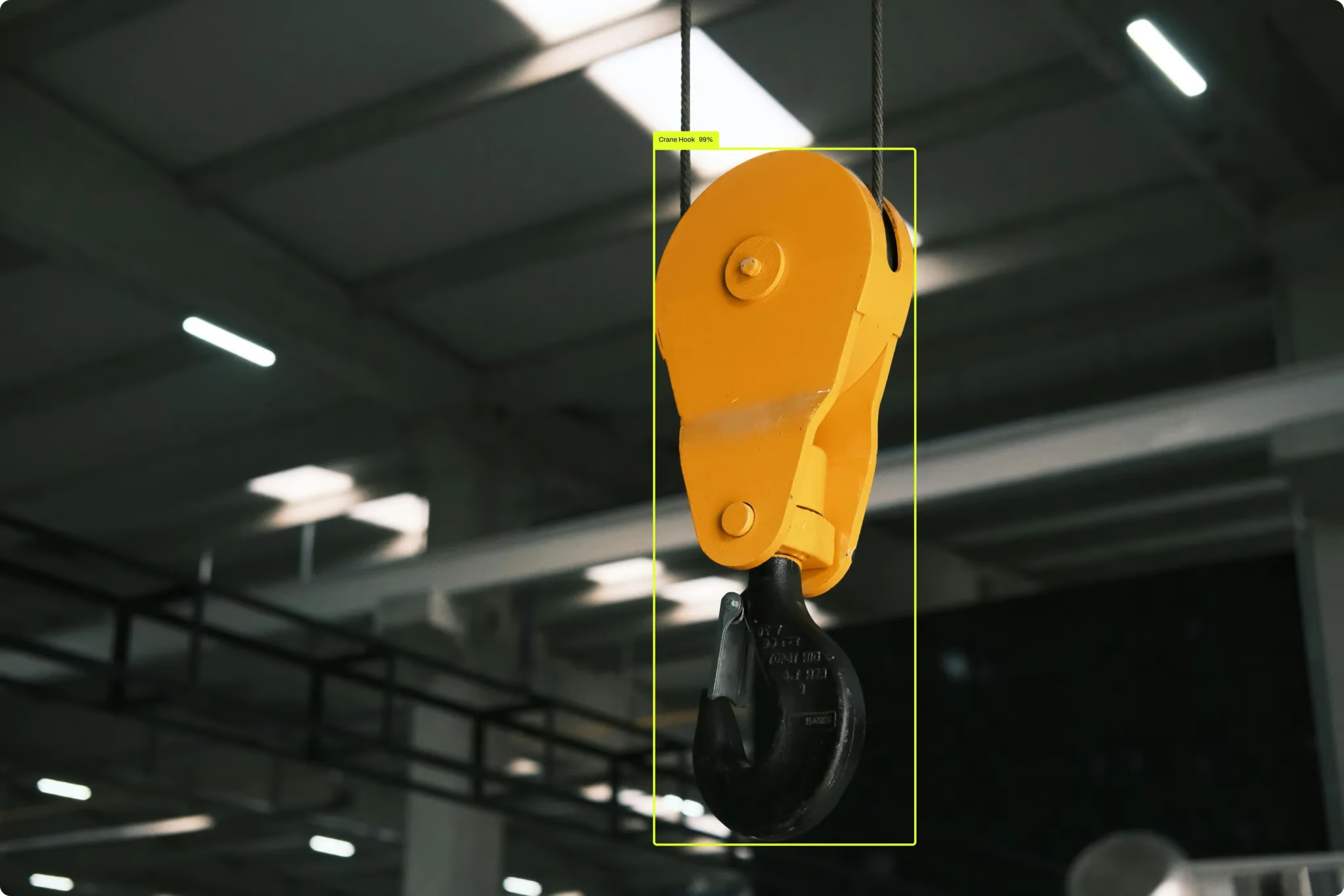
Fig 1. Uso de la compatibilidad de YOLO11 para la detección de objetos para monitorear ganado.
Link to this section¿Qué es la detección de objetos?#
La detección de objetos es una tarea de visión artificial que identifica y localiza objetos en imágenes o videos. Responde a dos preguntas clave: '¿Qué objetos hay en la imagen?' y '¿Dónde están ubicados?'
Puedes pensar en la detección de objetos como un proceso que implica dos pasos clave. El primero, la clasificación de objetos, permite al sistema reconocer y etiquetar objetos, como identificar un gato, un coche o una persona basándose en patrones aprendidos. El segundo, la localización, determina la posición del objeto dibujando un cuadro delimitador a su alrededor, indicando dónde aparece en la imagen. Juntos, estos pasos permiten a las máquinas detectar y comprender objetos en una escena.
El aspecto de la detección de objetos que la hace única es su capacidad para reconocer objetos y señalar su ubicación con precisión. Otras tareas de visión artificial se centran en objetivos diferentes.
Por ejemplo, la clasificación de imágenes asigna una etiqueta a toda una imagen. Mientras tanto, la segmentación de imágenes proporciona una comprensión a nivel de píxel de diferentes elementos. Por otro lado, la detección de objetos combina el reconocimiento con la localización. Esto la hace especialmente útil para tareas como contar múltiples objetos en tiempo real.
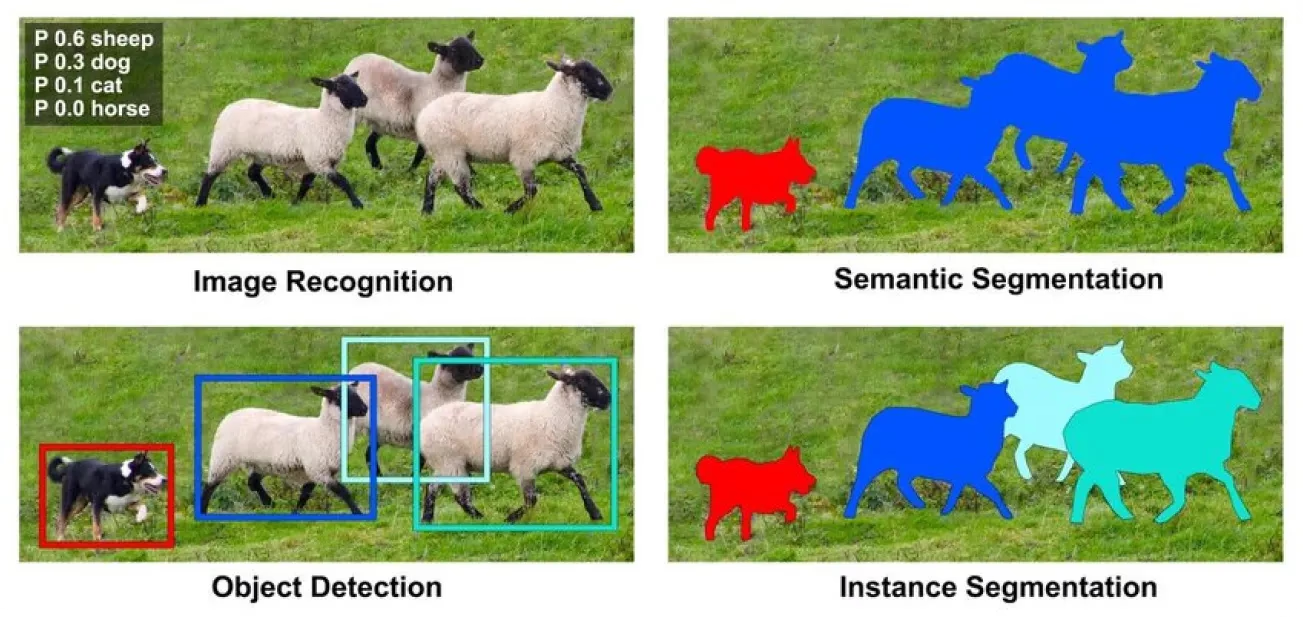
Fig 2. Comparación de tareas de visión artificial.
Link to this sectionReconocimiento de objetos frente a detección de objetos#
A medida que explores varios términos de visión artificial, es posible que sientas que el reconocimiento de objetos y la detección de objetos son intercambiables, pero sirven para propósitos diferentes. Una excelente manera de entender la diferencia es observar la detección facial y el reconocimiento facial.
La detección facial es un tipo de detección de objetos. Identifica la presencia de un rostro en una imagen y marca su ubicación usando un cuadro delimitador. Responde a la pregunta: “¿Dónde está el rostro en la imagen?”. Esta tecnología se utiliza comúnmente en cámaras de teléfonos inteligentes que enfocan automáticamente en los rostros o en cámaras de seguridad que detectan cuándo hay una persona presente.
El reconocimiento facial, por otro lado, es una forma de reconocimiento de objetos. No solo detecta un rostro; identifica de quién es el rostro analizando características únicas y comparándolas con una base de datos. Responde a la pregunta: “¿Quién es esta persona?”. Esta es la tecnología detrás de desbloquear tu teléfono con Face ID o los sistemas de seguridad de aeropuertos que verifican identidades.
En pocas palabras, la detección de objetos encuentra y localiza objetos, mientras que el reconocimiento de objetos los clasifica e identifica.
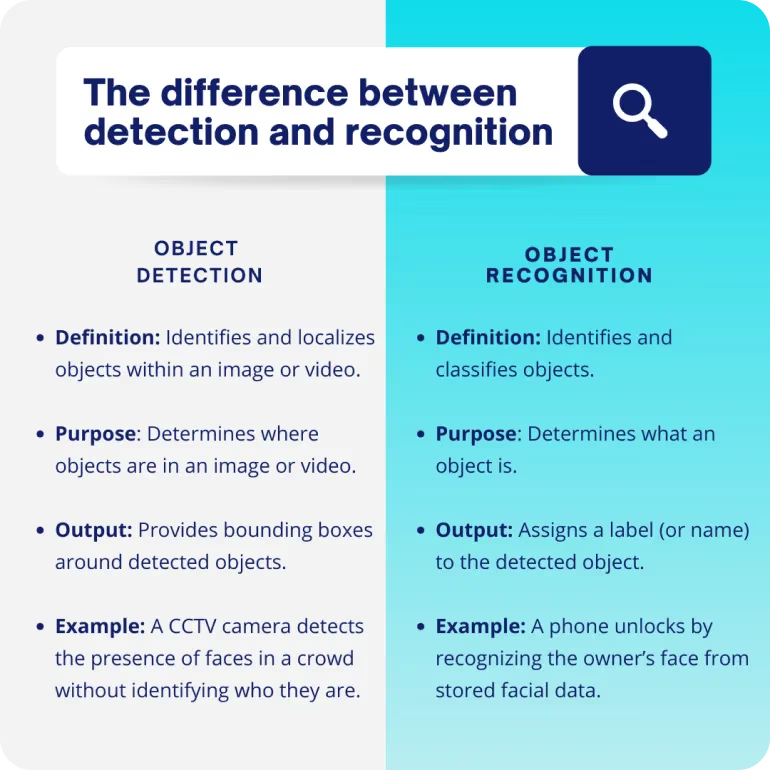
Fig 3. Detección de objetos frente a reconocimiento de objetos. Imagen del autor.
Muchos modelos de detección de objetos, como YOLO11, están diseñados para admitir la detección facial pero no el reconocimiento facial. YOLO11 puede identificar eficientemente la presencia de un rostro en una imagen y dibujar un cuadro delimitador a su alrededor, lo que lo hace útil para aplicaciones como sistemas de vigilancia, monitoreo de multitudes y etiquetado automático de fotos. Sin embargo, no puede determinar de quién es el rostro. YOLO11 se puede integrar con modelos entrenados específicamente para el reconocimiento facial, como Facenet o DeepFace, para permitir tanto la detección como la identificación en un solo sistema.
Link to this sectionComprender cómo funciona la detección de objetos#
Antes de discutir cómo funciona la detección de objetos, veamos más de cerca cómo una computadora analiza una imagen. En lugar de ver una imagen como nosotros, una computadora la divide en una cuadrícula de cuadrados diminutos llamados píxeles. Cada píxel contiene información de color y brillo que las computadoras pueden procesar para interpretar datos visuales.
Para dar sentido a estos píxeles, los algoritmos los agrupan en regiones significativas basadas en la forma, el color y la cercanía entre ellos. Los modelos de detección de objetos, como YOLO11, pueden reconocer patrones o características en estos grupos de píxeles.
Por ejemplo, un coche autónomo no ve a un peatón como nosotros: detecta formas y patrones que coinciden con las características de un peatón. Estos modelos se basan en un entrenamiento exhaustivo con datasets de imágenes etiquetados, lo que les permite aprender las características distintivas de objetos como coches, señales de tráfico y personas.
Un modelo típico de detección de objetos tiene tres partes clave: backbone (espina dorsal), cuello y cabeza. El backbone extrae características importantes de una imagen. El cuello procesa y refina estas características, mientras que la cabeza es responsable de predecir las ubicaciones de los objetos y clasificarlos.
Link to this sectionRefinamiento de detecciones y presentación de resultados#
Una vez realizadas las detecciones iniciales, se aplican técnicas de posprocesamiento para mejorar la precisión y filtrar predicciones redundantes. Por ejemplo, se eliminan los cuadros delimitadores superpuestos, asegurando que solo se conserven las detecciones más relevantes. Además, se asignan puntuaciones de confianza (valores numéricos que representan cuán seguro está el modelo de que un objeto detectado pertenece a una clase determinada) a cada objeto detectado para indicar la certeza del modelo en sus predicciones.
Finalmente, el resultado se presenta con cuadros delimitadores dibujados alrededor de los objetos detectados, junto con sus etiquetas de clase predichas y puntuaciones de confianza. Estos resultados pueden utilizarse luego para aplicaciones del mundo real.
Link to this sectionModelos populares de detección de objetos#
Hoy en día, existen muchos modelos de visión artificial disponibles, y algunos de los más populares son los modelos Ultralytics YOLO. Son conocidos por su velocidad, precisión y versatilidad. Con los años, estos modelos se han vuelto más rápidos, precisos y capaces de manejar una gama más amplia de tareas. El lanzamiento de Ultralytics YOLOv5 facilitó el despliegue con frameworks como PyTorch, permitiendo que más personas utilicen IA visual avanzada sin necesidad de conocimientos técnicos profundos.
Basándose en esta base, Ultralytics YOLOv8 introdujo nuevas funciones como segmentación de instancias, estimación de poses y clasificación de imágenes. Ahora, YOLO11 va un paso más allá con un mejor rendimiento en múltiples tareas. Con un 22% menos de parámetros que YOLOv8m, YOLO11m logra una mayor precisión media (mAP) en el dataset COCO. En términos simples, YOLO11 puede reconocer objetos con mayor precisión mientras utiliza menos recursos, lo que lo hace más rápido y fiable.
Tanto si eres un experto en IA como si acabas de empezar, YOLO11 ofrece una solución potente pero fácil de usar para aplicaciones de visión artificial.
Link to this sectionEntrenamiento personalizado de un modelo para detección de objetos#
El entrenamiento de modelos de IA visual implica ayudar a las computadoras a reconocer y comprender imágenes y videos. Sin embargo, el entrenamiento puede ser un proceso que consume mucho tiempo. En lugar de empezar desde cero, el aprendizaje por transferencia acelera las cosas utilizando modelos preentrenados que ya reconocen patrones comunes.
Por ejemplo, YOLO11 ya ha sido entrenado en el dataset COCO, que contiene un conjunto diverso de objetos cotidianos. Este modelo preentrenado puede ser entrenado de forma personalizada para detectar objetos específicos que quizás no estén incluidos en el conjunto de datos original.
Para entrenar de forma personalizada YOLO11, necesitas un dataset etiquetado que contenga imágenes de los objetos que deseas detectar. Por ejemplo, si deseas construir un modelo para identificar diferentes tipos de frutas en una tienda de comestibles, crearías un dataset con imágenes etiquetadas de manzanas, plátanos, naranjas, etc. Una vez preparado el dataset, YOLO11 puede entrenarse, ajustando parámetros como el tamaño de lote (batch size), la tasa de aprendizaje y las épocas para optimizar el rendimiento.
Con este enfoque, las empresas pueden entrenar a YOLO11 para detectar cualquier cosa, desde piezas defectuosas en la fabricación hasta especies de vida silvestre en proyectos de conservación, adaptando el modelo a sus necesidades exactas.
Link to this sectionAplicaciones de la detección de objetos#
A continuación, veamos algunos de los casos de uso del mundo real de la detección de objetos y cómo está transformando diversas industrias.
Link to this sectionDetección de peligros para la conducción autónoma#
Los coches autónomos utilizan tareas de visión artificial como la detección de objetos para navegar de forma segura y evitar obstáculos. Esta tecnología les ayuda a reconocer peatones, otros vehículos, baches y peligros en la carretera, lo que hace posible que comprendan mejor su entorno. Pueden tomar decisiones rápidas y moverse con seguridad a través del tráfico analizando constantemente su entorno.
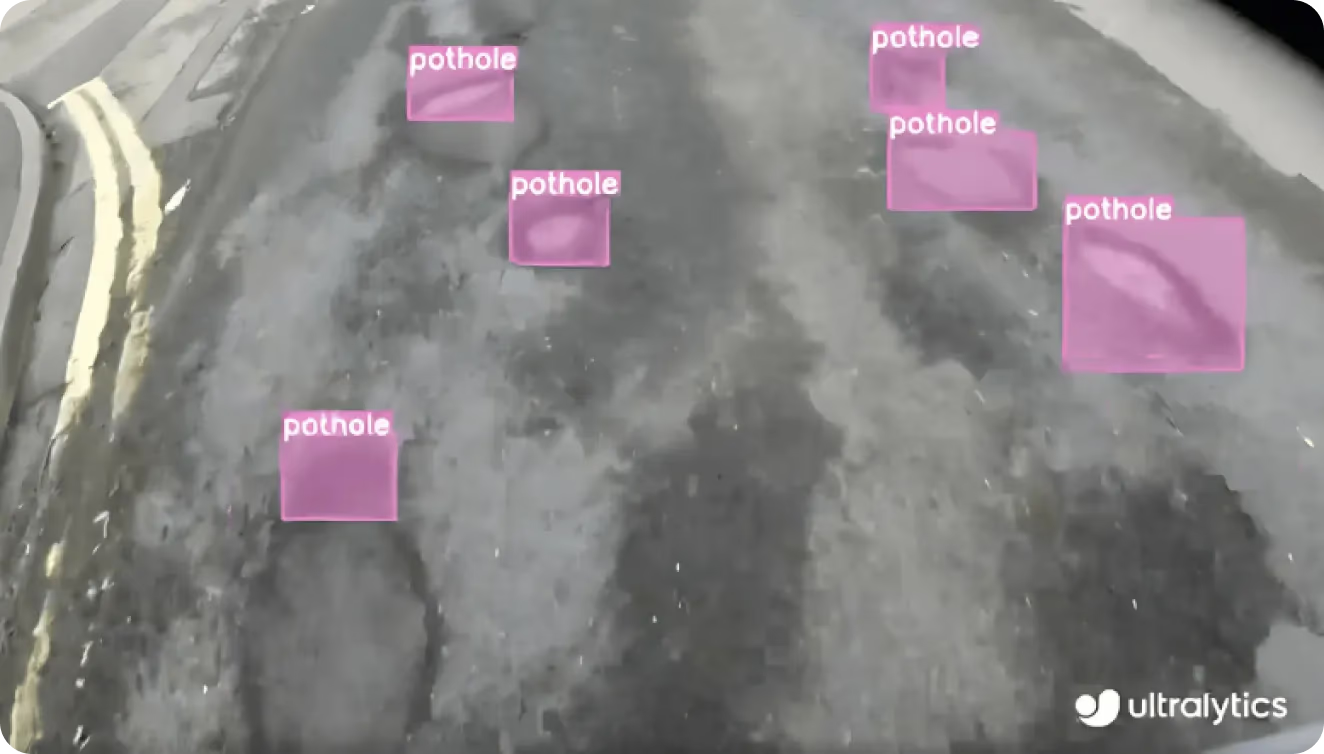
Fig 4. Un ejemplo de uso de la detección de objetos para detectar baches con YOLO11.
Link to this sectionAnálisis de imágenes médicas en la atención sanitaria#
Las técnicas de imágenes médicas como radiografías, resonancias magnéticas, tomografías computarizadas y ecografías crean imágenes altamente detalladas del cuerpo humano para ayudar a diagnosticar y tratar enfermedades. Estos escaneos producen grandes cantidades de datos que los médicos, como radiólogos y patólogos, deben analizar cuidadosamente para detectar enfermedades. Sin embargo, revisar cada imagen en detalle puede llevar mucho tiempo, y los expertos humanos a veces pueden pasar por alto detalles debido a la fatiga o limitaciones de tiempo.
Los modelos de detección de objetos como YOLO11 pueden ayudar identificando automáticamente características clave en escaneos médicos, como órganos, tumores o anomalías, con alta precisión. Los modelos entrenados de forma personalizada pueden resaltar áreas de interés con cuadros delimitadores, ayudando a los médicos a concentrarse en problemas potenciales más rápidamente. Esto reduce la carga de trabajo, mejora la eficiencia y proporciona información rápida.
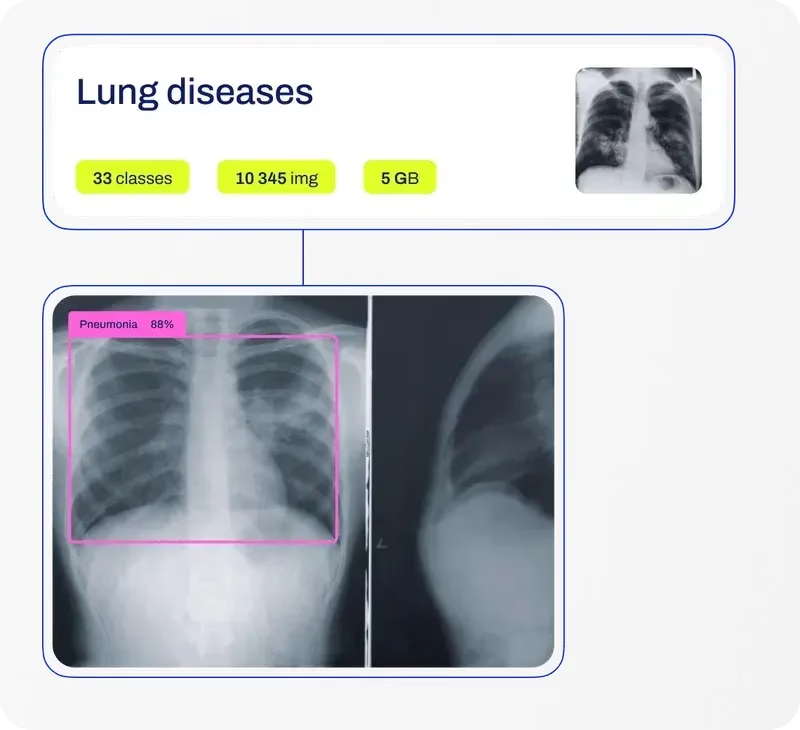
Fig 5. Análisis de imágenes médicas usando YOLO11.
Link to this sectionAumentar la seguridad con detección de personas y anomalías#
El seguimiento de objetos es una tarea de visión artificial compatible con YOLO11, que permite el monitoreo en tiempo real y mejoras en la seguridad. Se basa en la detección de objetos identificando objetos y rastreando continuamente su movimiento a través de los fotogramas. Esta tecnología se utiliza ampliamente en sistemas de vigilancia para mejorar la seguridad en diversos entornos.
Por ejemplo, en escuelas y guarderías, el seguimiento de objetos puede ayudar a monitorear a los niños y evitar que se alejen. En aplicaciones de seguridad, juega un papel clave en la detección de intrusos en áreas restringidas, el monitoreo de multitudes para evitar el hacinamiento o el comportamiento sospechoso, y el envío de alertas en tiempo real cuando se detecta actividad no autorizada. Al realizar un seguimiento de los objetos a medida que se mueven, los sistemas de seguimiento basados en YOLO11 mejoran la seguridad, automatizan el monitoreo y permiten respuestas más rápidas ante posibles amenazas.
Link to this sectionVentajas y desventajas de la detección de objetos#
Estos son algunos de los beneficios clave que la detección de objetos puede aportar a diversas industrias:
- Automatización: La detección de objetos puede ayudar a reducir la necesidad de supervisión humana en tareas como el monitoreo de imágenes de CCTV.
- Funciona con otros modelos de IA: Se puede integrar con reconocimiento facial, reconocimiento de acciones y sistemas de seguimiento para mejorar la precisión y la funcionalidad.
- Procesamiento en tiempo real: Muchos modelos de detección de objetos, como YOLO11, son rápidos y eficientes, lo que los hace ideales para aplicaciones en tiempo real que requieren resultados instantáneos.
Si bien estos beneficios destacan cómo la detección de objetos impacta diferentes casos de uso, también es importante considerar los desafíos involucrados en su implementación. Aquí hay algunos de los desafíos clave:
-
Privacidad de datos: El uso de datos visuales, especialmente en áreas sensibles como la vigilancia o la atención sanitaria, puede plantear problemas de privacidad y preocupaciones de seguridad.
-
Oclusión: La oclusión en la detección de objetos ocurre cuando los objetos están parcialmente bloqueados u ocultos a la vista, lo que dificulta que el modelo los detecte y clasifique con precisión.
-
Computacionalmente costoso: Los modelos de alto rendimiento a menudo requieren GPUs (Unidades de Procesamiento Gráfico) potentes para el procesamiento, lo que hace que el despliegue en tiempo real sea costoso.
Link to this sectionConclusiones clave#
La detección de objetos es una herramienta revolucionaria en la visión artificial que ayuda a las máquinas a detectar y localizar objetos en imágenes y videos. Se utiliza en sectores que van desde coches autónomos hasta la atención sanitaria, haciendo las tareas más fáciles, seguras y eficientes. Con modelos más nuevos como YOLO11, las empresas pueden crear fácilmente modelos de detección de objetos personalizados para crear aplicaciones de visión artificial especializadas.
Aunque existen algunos desafíos, como las preocupaciones sobre la privacidad y los objetos ocultos a la vista, la detección de objetos es una tecnología fiable. Su capacidad para automatizar tareas, procesar datos visuales en tiempo real e integrarse con otras herramientas de IA visual la convierte en una parte esencial de las innovaciones de vanguardia.
Para obtener más información, visita nuestro repositorio de GitHub e interactúa con nuestra comunidad. Explora innovaciones en sectores como IA en coches autónomos y visión artificial en la agricultura en nuestras páginas de soluciones. Consulta nuestras opciones de licencia de YOLO y da vida a tus proyectos de IA visual. 🚀






