Explorer la détection de petits objets avec Ultralytics YOLO11
Découvre comment Ultralytics YOLO11 fournit une détection d'objets petits, rapide et précise, dans des applications réelles telles que la surveillance et la robotique.

Les drones équipés de vision par IA peuvent voler à des centaines de mètres au-dessus du sol, tout en devant détecter une personne qui n'apparaît que comme quelques pixels dans leur flux vidéo. En fait, c'est un défi courant dans des domaines comme la robotique, la surveillance et la télédétection, où les systèmes doivent identifier des objets très petits au sein d'une image.
Mais les modèles traditionnels de détection d'objets peuvent avoir du mal à y parvenir. Les petits objets dans les images et les vidéos représentent des informations visuelles très limitées. En termes simples, lorsqu'un modèle les examine, il n'y a pas beaucoup de détails à apprendre ou à reconnaître.
Sous le capot, ces modèles reposent généralement sur une architecture basée sur des réseaux de neurones convolutifs (CNN). Les images passent à travers des couches du réseau et sont transformées en cartes de caractéristiques ou en représentations simplifiées qui mettent en évidence les motifs pertinents plutôt que les pixels bruts.
À mesure que l'image progresse dans le réseau, ces cartes de caractéristiques deviennent plus petites. Cela accélère le calcul, mais signifie aussi que les détails fins peuvent disparaître.
Pour les objets minuscules, ces détails sont cruciaux. Une fois ces détails perdus, un modèle de vision par ordinateur peut avoir des difficultés à détecter l'objet, ce qui peut conduire à des boîtes englobantes moins précises ou incohérentes.
Les systèmes de vision par ordinateur en temps réel et de bout en bout rendent cela encore plus complexe. Les images haute résolution aident à préserver les détails, mais elles ralentissent l'inférence et nécessitent plus de puissance GPU. Les résolutions plus basses fonctionnent plus rapidement, mais les petits objets deviennent encore plus difficiles à détecter.
C'est un équilibre constant entre la vitesse, la précision et les limites matérielles. Grâce aux avancées technologiques récentes, des modèles de vision par ordinateur comme Ultralytics YOLO11 et le futur Ultralytics YOLO26 sont conçus pour gérer ce compromis plus efficacement.

Fig 1. Utilisation de YOLO11 pour détecter de petits objets dans l'imagerie aérienne (Source)
Dans cet article, nous allons explorer pourquoi la détection de petits objets est difficile et comment YOLO11 peut faciliter la tâche. Commençons !
Link to this sectionQu'est-ce que la détection de petits objets et pourquoi est-ce important ?#
La détection de petits objets est une tâche en vision par ordinateur, une branche de l'IA, qui se concentre sur l'identification et la localisation d'objets occupant une très petite partie d'une image. Ces objets sont souvent représentés dans l'image par un nombre limité de pixels, qui sont les plus petites unités d'une image numérique. Cela les rend plus difficiles à détecter que des cibles plus grandes et plus nettes (qui contiennent souvent plus de pixels).
Par exemple, des véhicules dans l'imagerie aérienne, des outils dans un atelier, ou des personnes capturées par des caméras de surveillance grand angle, peuvent tous apparaître comme de petits objets dans l'image. Leur détection est importante car ils contiennent souvent des informations critiques, et de nombreuses applications du monde réel, comme la surveillance, dépendent de ces détections pour fonctionner correctement.
Lorsque des petits objets sont manqués, la performance du système et la prise de décision peuvent être affectées. La surveillance par véhicule aérien sans pilote (UAV) en est un bon exemple, où manquer un petit objet mobile au sol peut impacter la navigation ou la précision du suivi.
Link to this sectionDéfis liés à la détection de petits objets#
Les anciens systèmes utilisaient des caractéristiques conçues à la main et des méthodes traditionnelles de vision par ordinateur, qui avaient du mal dans les scènes chargées ou variées. Même aujourd'hui, avec des modèles d'apprentissage profond bien plus performants, détecter de petites cibles reste difficile lorsqu'elles n'occupent qu'une infime partie de l'image.
Ensuite, examinons certains défis courants qui apparaissent dans différents scénarios réels lors de la détection de petits objets.
Link to this sectionTaille, pixels et perte d'information#
Les petits objets contiennent très peu de pixels, ce qui limite la quantité de détails visuels qu'un modèle peut apprendre durant les étapes comme l'extraction de caractéristiques. En conséquence, les motifs tels que les bords, les formes et les textures sont plus difficiles à détecter, ce qui rend les petits objets plus susceptibles de se fondre dans l'arrière-plan.
À mesure que les images passent à travers les couches convolutives d'un réseau de neurones, les informations visuelles contenues dans les pixels sont progressivement compressées en cartes de caractéristiques. Cela aide le modèle à rester efficace, mais signifie également que les détails fins s'estompent.
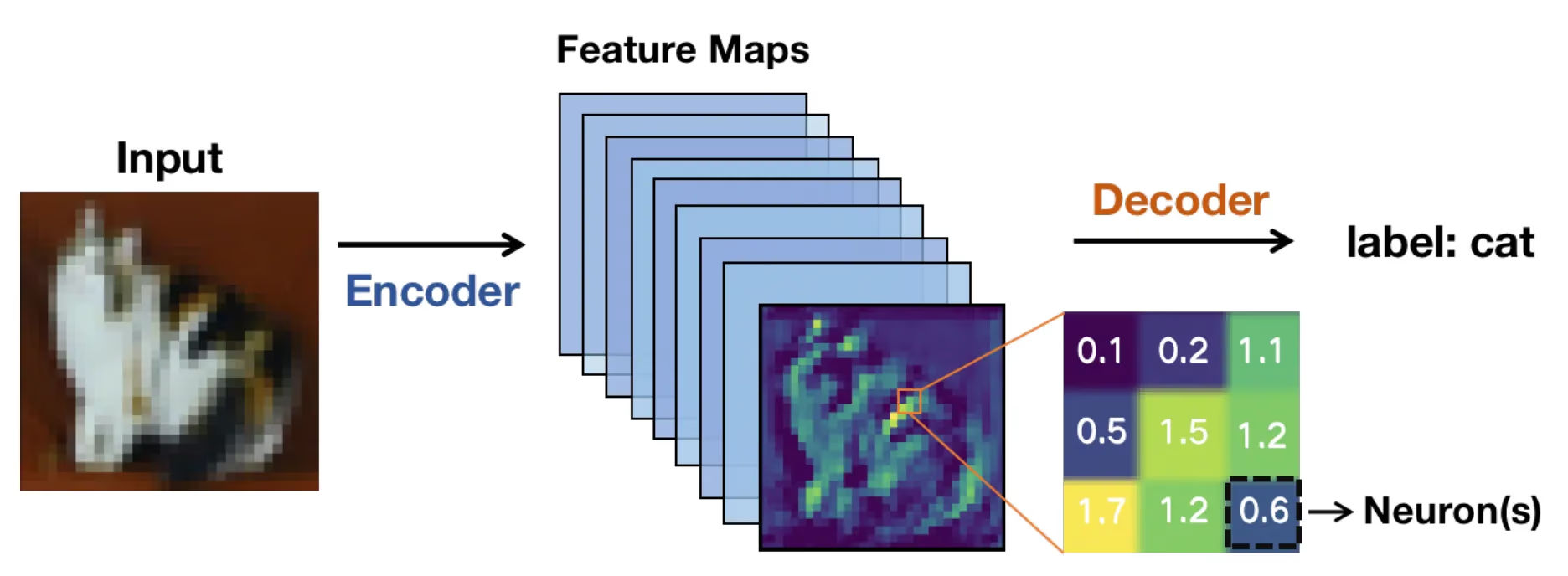
Fig 2. Les cartes de caractéristiques représentent des motifs visuels dans une image (Source)
Pour les petites cibles, des indices importants peuvent disparaître avant que le réseau de détection n'ait la chance d'agir. Lorsque cela se produit, la localisation devient moins fiable et les boîtes englobantes peuvent se déplacer, se chevaucher ou manquer complètement les objets cibles.
Link to this sectionOcclusion, variance d'échelle et contexte#
Les défis liés à la taille sont également souvent accentués par l'occlusion. L'occlusion se produit lorsque des objets, particulièrement les plus petits, sont partiellement cachés par d'autres objets dans la scène.
Cela réduit la zone visible d'une cible, ce qui limite les informations disponibles pour le détecteur d'objets. Même une petite occlusion peut confondre les réseaux de détection, surtout lorsqu'elle est combinée à une entrée basse résolution. Un exemple intéressant de cela peut être observé dans les jeux de données UAV tels que VisDrone, où des piétons, des vélos ou des véhicules peuvent être partiellement bloqués par des bâtiments, des arbres ou d'autres objets en mouvement.
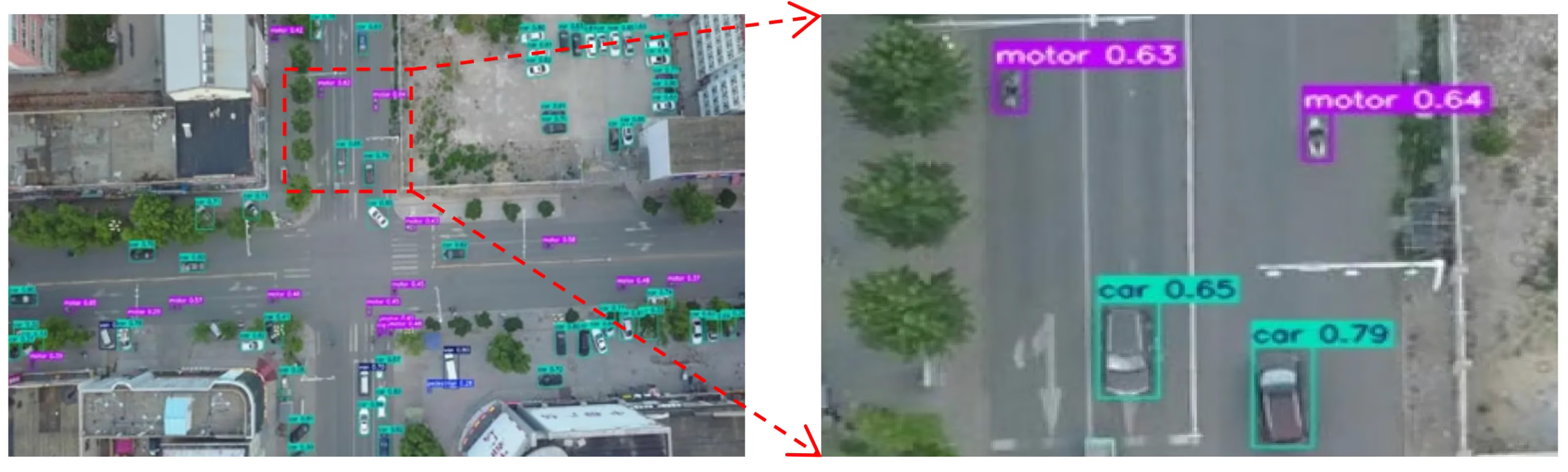
Fig 3. Un exemple issu du jeu de données VisDrone montrant de petits objets (Source)
De même, la variance d'échelle introduit une autre couche de difficulté lorsque le même objet apparaît très petit ou relativement grand selon la distance et la position de la caméra. Malgré ces obstacles, les algorithmes de détection doivent reconnaître ces petits objets à travers différentes échelles sans perdre en précision.
Le contexte joue également un rôle important dans la détection. Par exemple, les gros objets apparaissent généralement avec des environnements clairs qui fournissent des indices visuels utiles. En revanche, les petites cibles manquent souvent de ces informations contextuelles, ce qui rend la reconnaissance de motifs plus difficile.
Link to this sectionLe problème de la mesure cachée dans la détection de petits objets#
Les mesures d'évaluation courantes, telles que l'Intersection over Union (IoU), mesurent à quel point une boîte englobante prédite chevauche la boîte de vérité terrain. Bien que l'IoU fonctionne bien pour les gros objets, son comportement est assez différent pour les petits.
Les petits objets n'occupent que quelques pixels, donc même un léger décalage dans la boîte prédite peut créer une grande erreur proportionnelle et réduire fortement le score IoU. Cela signifie que les petits objets ne parviennent souvent pas à atteindre le seuil standard d'IoU utilisé pour compter une prédiction comme correcte, même lorsque l'objet est visible dans l'image.
En conséquence, les erreurs de localisation sont plus susceptibles d'être classées comme des faux positifs ou des faux négatifs. Ces limitations ont poussé les chercheurs à repenser la façon dont les systèmes de détection d'objets évaluent et traitent les cibles petites et difficiles à détecter.
Link to this sectionCaractéristiques multi-échelles : La clé de la détection de petits objets en temps réel#
Alors que les chercheurs travaillaient à améliorer la détection de petits objets, il est devenu évident que préserver et représenter les informations visuelles à travers plusieurs échelles est essentiel. Cette idée est reprise dans des recherches récentes sur arXiv et dans des articles présentés lors de conférences telles que les conférences internationales IEEE et l'Association européenne de vision par ordinateur (ECCV).
À mesure que les images progressent dans un réseau de neurones, les petits objets peuvent perdre des détails ou disparaître complètement, c'est pourquoi les modèles de vision par ordinateur modernes comme YOLO11 mettent fortement l'accent sur une meilleure extraction de caractéristiques. Ensuite, parcourons les concepts fondamentaux derrière les cartes de caractéristiques et les réseaux pyramidaux de caractéristiques pour mieux les comprendre.
Link to this sectionCartes de caractéristiques et représentation d'échelle#
Lorsqu'une image d'entrée, comme une image de télédétection, entre dans un réseau de neurones, elle est progressivement transformée en cartes de caractéristiques. Ce sont des représentations simplifiées de l'image qui mettent en évidence les motifs visuels comme les bords, les formes et les textures.
À mesure que le réseau devient plus profond, ces cartes de caractéristiques deviennent plus petites en taille spatiale. Cette réduction aide le modèle à fonctionner efficacement et à se concentrer sur des informations de haut niveau. Cependant, le rétrécissement et les cartes de caractéristiques profondes réduisent également les détails spatiaux.
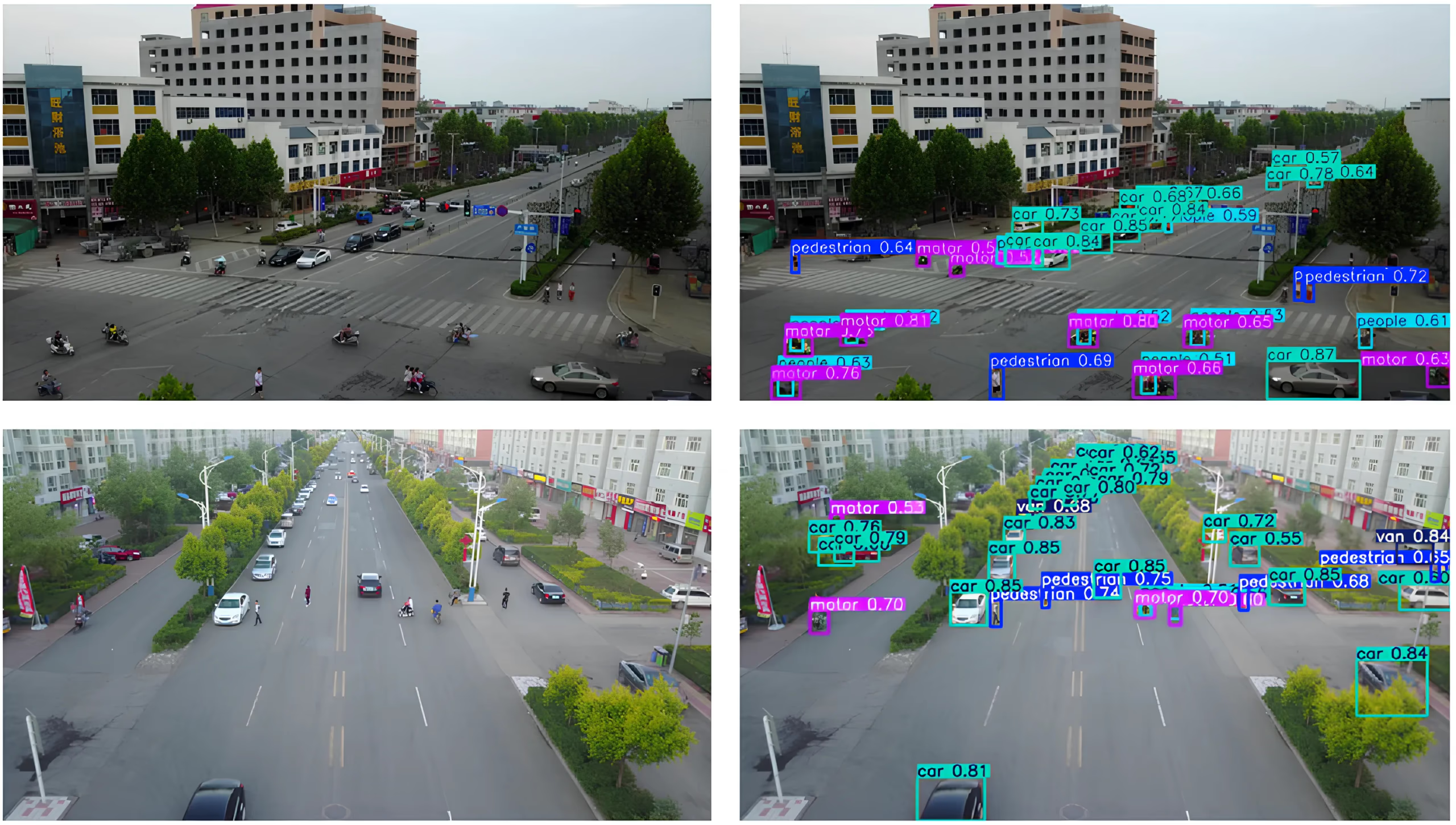
Fig 4. L'extraction de caractéristiques est la clé pour la détection de petits objets. (Source)
Alors que les gros objets conservent suffisamment d'informations visuelles pour une détection précise, les petites cibles peuvent perdre des détails critiques après seulement quelques couches de réseau. Lorsque cela se produit, un modèle peut avoir du mal à reconnaître qu'un petit objet existe même. C'est l'une des principales raisons pour lesquelles les petits objets sont manqués dans les modèles de détection d'objets profonds.
Link to this sectionRéseaux pyramidaux de caractéristiques et apprentissage multi-échelle#
Les réseaux pyramidaux de caractéristiques, souvent appelés FPN, ont été introduits pour remédier à la perte de détails spatiaux, et ils fonctionnent comme un module de support qui combine les informations provenant de multiples couches afin que les modèles puissent détecter les petits objets plus efficacement. Ce processus est également connu sous le nom d'agrégation de caractéristiques et de fusion de caractéristiques.
Les couches superficielles fournissent des détails spatiaux fins, tandis que les couches plus profondes ajoutent un contexte sémantique, permettant un apprentissage efficace des caractéristiques multi-échelles. Contrairement au suréchantillonnage naïf, qui agrandit simplement les cartes de caractéristiques, le FPN préserve des informations significatives et améliore la détection de petits objets.
Les approches modernes s'appuient sur cette idée en utilisant la fusion de caractéristiques adaptative et des conceptions sensibles au contexte pour améliorer davantage la détection de petites cibles. En d'autres termes, le FPN aide les modèles à voir à la fois la vue d'ensemble et les minuscules détails en même temps. Cette optimisation est essentielle lorsque les objets sont petits.
Link to this sectionComment les modèles de détection d'objets ont évolué pour gérer les petits objets#
Voici un aperçu de la façon dont les modèles de détection d'objets ont évolué et progressé au fil du temps pour mieux détecter les objets de différentes tailles, y compris les très petits :
- Méthodes de détection précoces : Les premières approches de détection d'objets reposaient sur des caractéristiques conçues manuellement et des algorithmes basés sur des règles ancrés dans le traitement d'image classique. Comme ces caractéristiques étaient fixes, les performances se dégradaient avec des images différentes.
- Introduction de l'apprentissage automatique et de l'apprentissage profond : L'adoption de l'apprentissage automatique et de l'apprentissage profond a marqué un tournant majeur dans la recherche sur la détection d'objets. Au lieu de s'appuyer sur des règles prédéfinies, les réseaux de neurones apprenaient les représentations visuelles directement à partir des données d'entraînement, améliorant l'adaptabilité à travers différentes tailles d'objets et scènes.
- Réseaux convolutifs : Ces réseaux de neurones apprennent à voir les motifs dans les images. Chaque couche capte des détails différents, commençant par des bords et des couleurs simples, puis des formes, et finalement des objets complets, ce qui les rend essentiels pour la vision par ordinateur moderne.
- Détecteurs d'objets à deux étapes : Les détecteurs à deux étapes, tels que Faster R-CNN, introduits par Girshick et Ren, généraient d'abord des régions candidates puis les classifiaient. Cette approche a amélioré la précision pour les petits objets mais a augmenté le coût computationnel et réduit les performances en temps réel.
- Détecteurs d'objets à une étape : Les détecteurs à une étape, tels que SSD (Single-Shot Detector) et la famille YOLO (You Only Look Once), incluant YOLOv3, Ultralytics YOLOv5 et plus tard Ultralytics YOLOv8, effectuent la détection en un seul passage. Cette conception améliore considérablement la vitesse d'inférence tout en maintenant une précision compétitive.
- Modèles de pointe les plus récents : Les modèles de détection d'objets plus récents mettent l'accent sur les performances en temps réel et le déploiement en périphérie. Les récentes sorties de modèles Ultralytics YOLO, comme Ultralytics YOLO11 et le futur Ultralytics YOLO26, sont conçues pour équilibrer une grande précision avec une inférence à faible latence, les rendant parfaitement adaptés à la détection d'objets de toutes tailles, y compris les petites cibles, sur des appareils avec une puissance de calcul limitée.
Link to this sectionUtiliser YOLO11 pour les cas d'utilisation de détection de petits objets#
Maintenant que nous comprenons mieux comment fonctionne la détection de petits objets, examinons quelques applications réelles où YOLO11 peut être appliqué.
Link to this sectionUAV et imagerie aérienne#
Imagine un drone volant haut au-dessus d'une rue très fréquentée. De cette hauteur, les voitures, les vélos et même les personnes rétrécissent pour ne devenir que quelques pixels sur un écran.
Les modules UAV et d'imagerie aérienne capturent souvent des scènes comme celle-ci, où les objets d'intérêt sont minuscules et entourés d'arrière-plans encombrés, ce qui les rend difficiles à détecter pour les modèles de vision par ordinateur.
Dans ces types de scénarios, YOLO11 peut être un choix de modèle idéal. Par exemple, un drone équipé d'un modèle comme YOLO11 pourrait surveiller le trafic en temps réel, détectant les véhicules, les cyclistes et les piétons au fur et à mesure de leur déplacement dans la scène, même lorsque chaque objet n'occupe qu'une petite partie de l'image. Cela permet une prise de décision plus rapide et des informations plus précises dans des applications telles que la gestion du trafic, la sécurité publique ou l'urbanisme.
Link to this sectionRobotique et automatisation#
Les robots sont souvent utilisés dans des environnements où la précision et le timing sont critiques. Dans des paramètres comme les entrepôts, les usines et les fermes, un robot peut avoir besoin de reconnaître de très petits objets, tels qu'une pièce sur une chaîne de montage, une étiquette sur un colis ou un petit bourgeon de plante dans un champ, et de réagir rapidement.
Détecter des objets de cette taille peut être compliqué, surtout lorsqu'ils n'apparaissent que comme quelques pixels dans le flux de la caméra ou sont partiellement occultés par d'autres objets. Manquer ces petits détails peut ralentir l'automatisation ou affecter la capacité du robot à accomplir une tâche.
YOLO11 peut faire la différence dans ces situations. Son extraction de caractéristiques améliorée et son inférence rapide permettent aux robots de détecter les petits objets en temps réel et d'agir immédiatement.
YOLO11 prend également en charge la segmentation d'instance, ce qui peut aider les robots à comprendre les limites des objets et les points de saisie plus précisément, plutôt que de seulement localiser des boîtes englobantes générales. Par exemple, un bras robotique intégré avec YOLO11 pourrait repérer de petits composants sur un tapis roulant, segmenter leur forme exacte et les ramasser avant qu'ils ne soient hors de portée, aidant le système à rester efficace et fiable.
Link to this sectionCe qui rend YOLO11 efficace pour la détection de petits objets#
Avec autant de modèles de vision par ordinateur disponibles aujourd'hui, tu pourrais te demander ce qui distingue Ultralytics YOLO11.
Voici quelques raisons pour lesquelles Ultralytics YOLO11 est une excellente option pour les applications où les petits objets doivent être détectés :
- Meilleure extraction de caractéristiques : YOLO11 utilise une architecture de backbone et de neck améliorée pour booster l'extraction de caractéristiques, permettant une détection d'objets plus précise.
- Écosystème et facilité d'utilisation : Le package Python Ultralytics est une bibliothèque qui fournit des fonctions intégrées pour charger, entraîner, valider et déployer des modèles comme YOLO11. Comme ces flux de travail ne nécessitent que quelques lignes de code, les équipes peuvent rapidement expérimenter et affiner les modèles pour la détection de petits objets.
- Optimisé pour le déploiement en périphérie : YOLO11 peut fonctionner efficacement sur des appareils en périphérie comme NVIDIA Jetson, Raspberry Pi et des systèmes de caméras industrielles. En termes simples, il permet des tâches de vision par IA en temps réel directement sur l'appareil.
Link to this sectionStratégies pratiques à utiliser lors de la détection de petits objets avec YOLO11#
En plus d'utiliser un modèle comme YOLO11, la façon dont tu prépares tes annotations, le jeu de données global et la procédure d'entraînement du modèle peuvent faire une différence significative dans la performance de détection.
Voici un aperçu rapide sur lequel se concentrer :
- Augmentation de données appropriée : Une légère augmentation des données, telle que la mise à l'échelle ou le recadrage, peut aider le modèle à se généraliser à de nouvelles images. Cependant, une augmentation agressive à grande échelle peut déformer ou supprimer les petits objets, les rendant plus difficiles à apprendre pour le modèle.
- Examen des cas d'échec : Analyser où le modèle manque ou identifie mal les objets aide à créer une base de référence et à révéler si les problèmes proviennent du jeu de données, d'informations perdues lors de l'extraction de caractéristiques, ou s'il faut ajuster les paramètres d'entraînement.
- Composition du jeu de données : Ton jeu de données doit contenir suffisamment d'exemples de petits objets pour que le modèle puisse apprendre des motifs significatifs, et il doit rester équilibré afin que les plus gros objets ne masquent pas les plus petits pendant l'entraînement.
Link to this sectionPoints clés#
La détection de petits objets est difficile car les petites cibles perdent des détails à mesure que les images passent à travers un modèle de vision par ordinateur. YOLO11 améliore la façon dont ces détails sont préservés, rendant la détection de petits objets plus fiable sans sacrifier les performances en temps réel. Cet équilibre permet à YOLO11 de soutenir une détection précise et efficace dans les applications réelles.
Rejoins notre communauté grandissante ! Explore notre dépôt GitHub pour en savoir plus sur l'IA. Découvre des innovations comme la vision par ordinateur dans la vente au détail et l'IA dans l'industrie automobile en visitant nos pages de solutions. Pour commencer à construire avec la vision par ordinateur dès aujourd'hui, jette un œil à nos options de licence.






